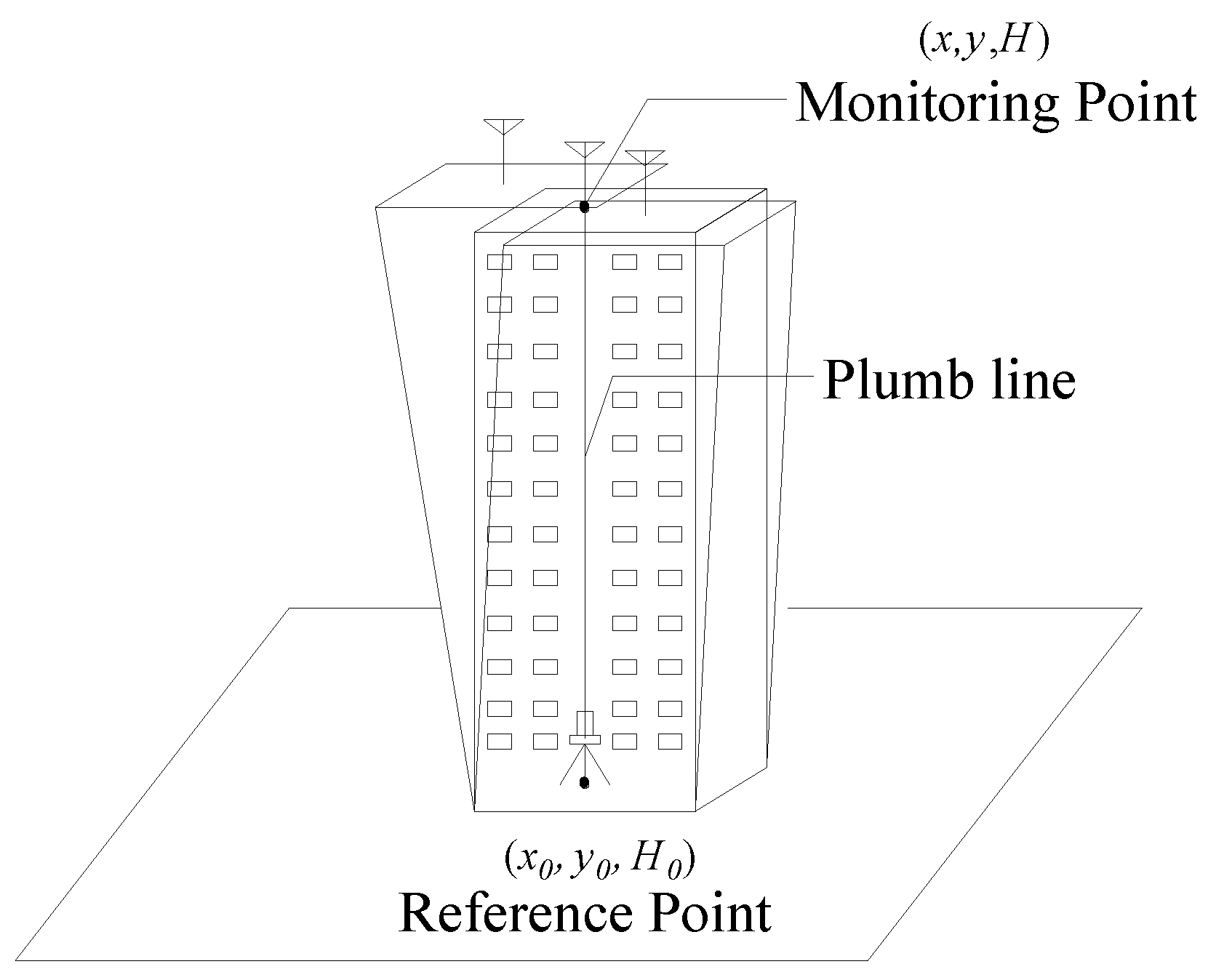
5.1. Horizontal Motion Analysis of the W Tower
The Guangzhou International Finance Center (denoted as the W Tower) is a reinforced concrete structure located in city center of Guangzhou, China. The building is a core tube structure and has a total height of 438 m. However, motion of the W Tower in a horizontal plane will occur due to such external factors as tower crane operation, wind, construction load, temperature, and sun exposure during construction. In this case, it is very necessary to analyze the impact of the W Tower’s motion on laser plumbing. In order to obtain the motion of the W Tower, the coordinate time series of the monitoring point need to be calculated.
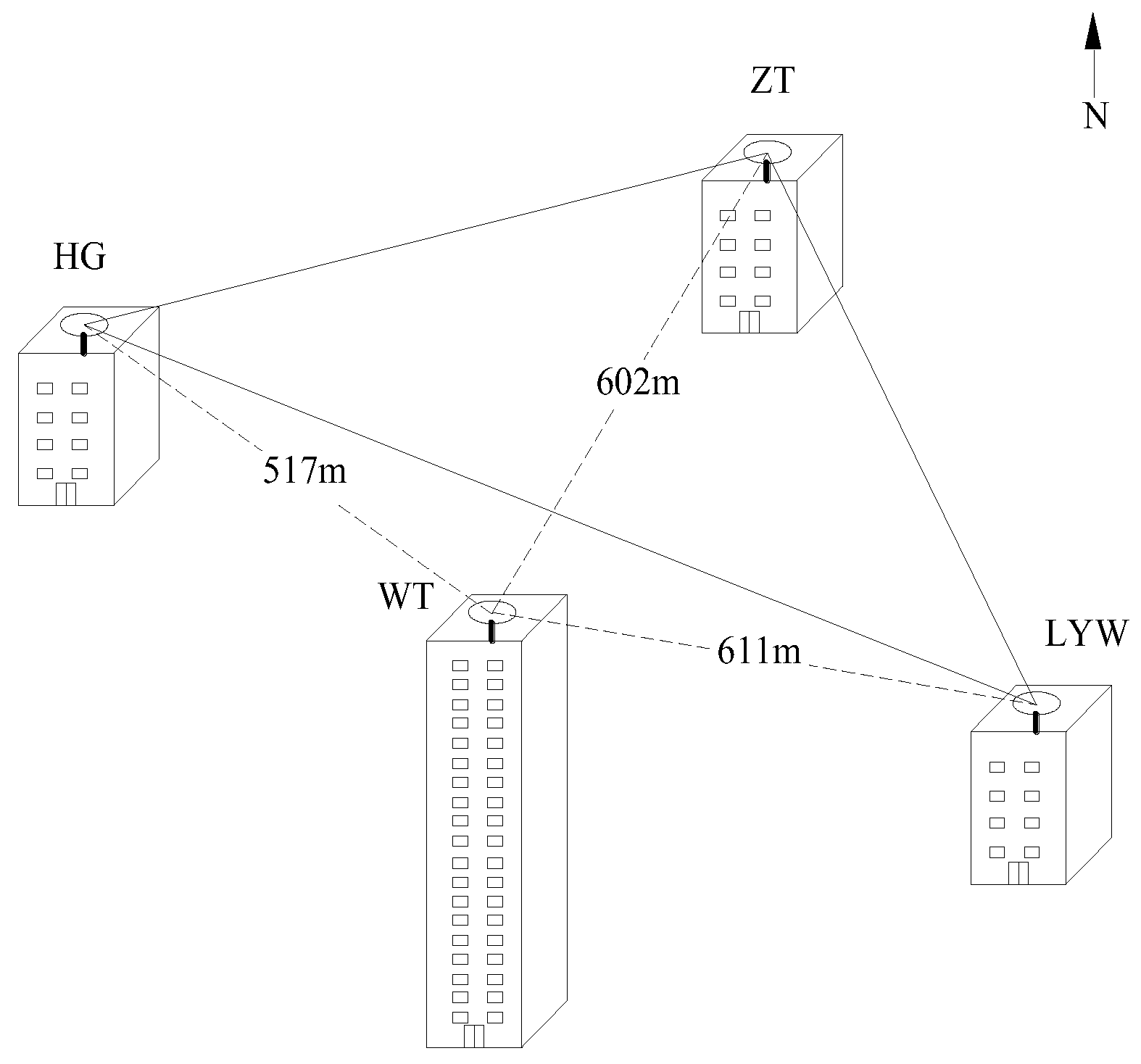
The authors chose point WT (W Tower, the average of the plumbing points) as the monitoring station on the roof of the W Tower. In order to reduce the impact of the W Tower’s motion on the vertical reference transmission, the reference point is first transmitted by the laser plummet at different moments. Then, the authors chose the average of plumbing points as the monitoring point WT. In addition, three points (HG, LYW, and ZT) are chosen from five construction control points to establish a reference network around the W Tower as shown in
Figure 6. The authors chose these locations based on their suitability as reference stations according to the International GNSS service (IGS) criteria, keeping in mind the difficulty of finding adequate locations in an urban setting. Three control points were located on the concrete buildings as low as 100 m. Dual-frequency Trimble R8 GNSS receivers were placed at all stations to collect 24 h and 23 min data with a sampling rate of 0.067 Hz.
The GNSS data of the reference network consisting of points HG, ZT, and LYW was firstly processed in the static mode to obtain the baseline vectors between reference stations. Secondly, the GNSS data of the monitoring station, namely WT, was processed in the post-processed kinematic mode to obtain baseline vectors from the monitoring station to each reference station, giving a total of 13,495 baseline vectors at 5648 epochs. Among others, there are 659 single baselines, which means only one baseline vector can be successfully calculated between the monitoring station and one of the three reference stations at 659 epochs. In particular, the 659 baseline vectors will be used directly without any processing in the following. Owing to observational conditions, the integer ambiguity resolution cannot be fixed at 206 epochs. Thirdly, the monitoring network was constructed by the reference network and the baseline vectors between the monitoring station and reference stations at each epoch. Then, the authors check the misclosures and the corrections of baseline vectors to identify and eliminate gross errors of baseline vectors epoch-by-epoch. By checking the misclosures and the corrections of baseline vectors, total of 1726 baseline vectors are eliminated as gross errors. Referring to the statistics listed in
Table 5, after processing, the corrections of all baseline vectors are less than 3 times the standard deviation
σ of the baseline vector, and 96.27%, 91.59%, and 98.03% of corrections are within the range of ±2.0 cm for all three directions (not including the 659 single baseline vectors).
Finally, the reference points’ coordinates can be used as a constraint to then process the GNSS monitoring network via a least-squares adjustment at each epoch.
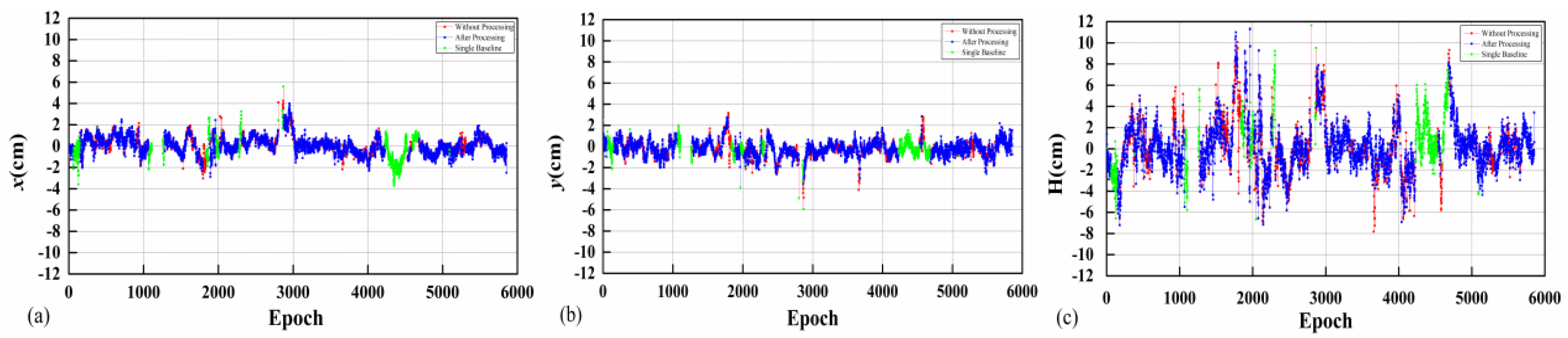
Table 6 lists the statistics of the differences in position with respect to the coordinate time series of the monitoring point as shown in
Figure 7 in the
x,
y, and
H directions without and with processing.
Referring to the statistics listed in
Table 6, one may see that a small number of gross errors have been eliminated, especially in the
x and
y directions. After processing, the differences of 96.48% of the
x coordinates and 98.57% of the
y coordinates are within ±2.0 cm, while the differences of 90.49% of the
H coordinates is within ±4.0 cm. However, there are some abnormal coordinates included in the result above (shown by the green points in
Figure 7), which are calculated by just one reference point and one baseline vector instead of using a least-squares adjustment. In addition, the operation of a tower crane has an impact on the motion of the W Tower.
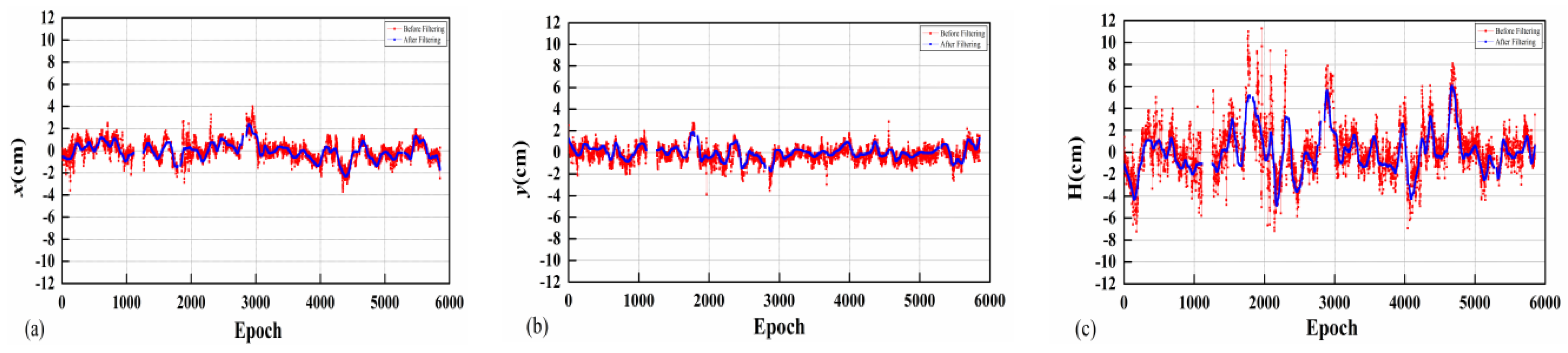
Nevertheless, the coordinate time series of the monitoring point contain both the displacement information and the measurement-error information after the aforementioned processing. The displacement of the monitoring point is characterized by a systematic signal even though it may be small over a short time period, but the measurement-error is characterized by strong noise that can be removed by wavelet filtering [
29,
30]. In order to extract the displacement signal of the W Tower, the wavelet filter is applied to further process the coordinate time series. Based on the understanding of the signal as discussed previously, a db4 wavelet filter at level 6 is applied to eliminate the background noise hidden in the coordinate time series.
Figure 8 shows the coordinate variations before and after filtering.
The standard deviations (STDs) of the background noises are ±5.0, ±4.5, and ±13.0 mm in the x, y, and H directions, respectively. It is evident that, after the filtering, the background noises are almost eliminated and the GNSS time-series becomes smoother. After filtering, the differences of 89.34% of the x coordinates and 95.08% of the y coordinates are within ±1.0 cm, while the differences of 95.24% of the H coordinates are within ±4.0 cm. In addition, the results show that the displacement in the x direction is slightly larger than the displacement in the y direction, which may be related to wind direction. Therefore, one may conclude that the displacement of the W Tower is within ±1.0 cm in horizontal direction at most epochs, so it has less impact on the vertical reference transmission.
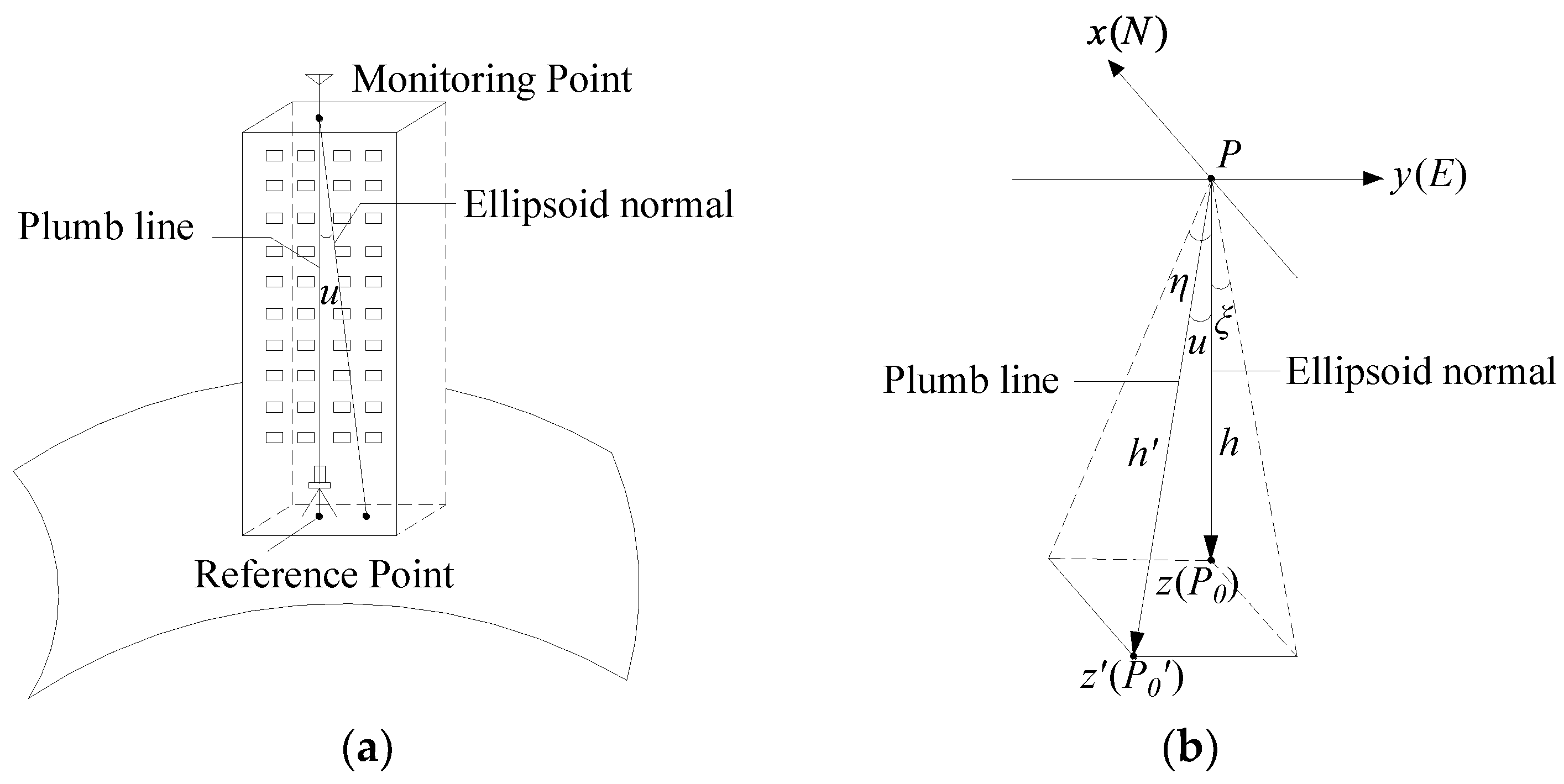
5.2. Calculating Deflection of the Vertical Components for the Monitoring Point
Now, let us calculate the deflection of the vertical components using the Earth gravity field model and the GZGEOID model [
32]. EGM2008 (to degree 2160) and EIGEN-6C4 (to degree 2190) (
http://icgem.gfz-potsdam.de/) were used to calculate deflections of the vertical by Equations (8) and (9). Qi et al. have estimated the accuracy of the EGM2008 model with 466 first-order astrogeodetic points in the east (>102° E) of China. The estimated accuracy of deflection of the vertical components from the EGM2008 model are ±1.734′′ and ±1.649′′ in the north-south and east-west components, respectively [
33], which is main reason for selecting the EGM2008 and EIGEN-6C4 (including GOCE(Gravity field and steady-state Ocean Circulation Explorer) data) models.
Considering
and
[
32], and assuming that orthometric height differences and ellipsoidal height differences are not correlated, we obtain
. If the accuracy of the deflection of the vertical components is expected to be about 1 arc second, the
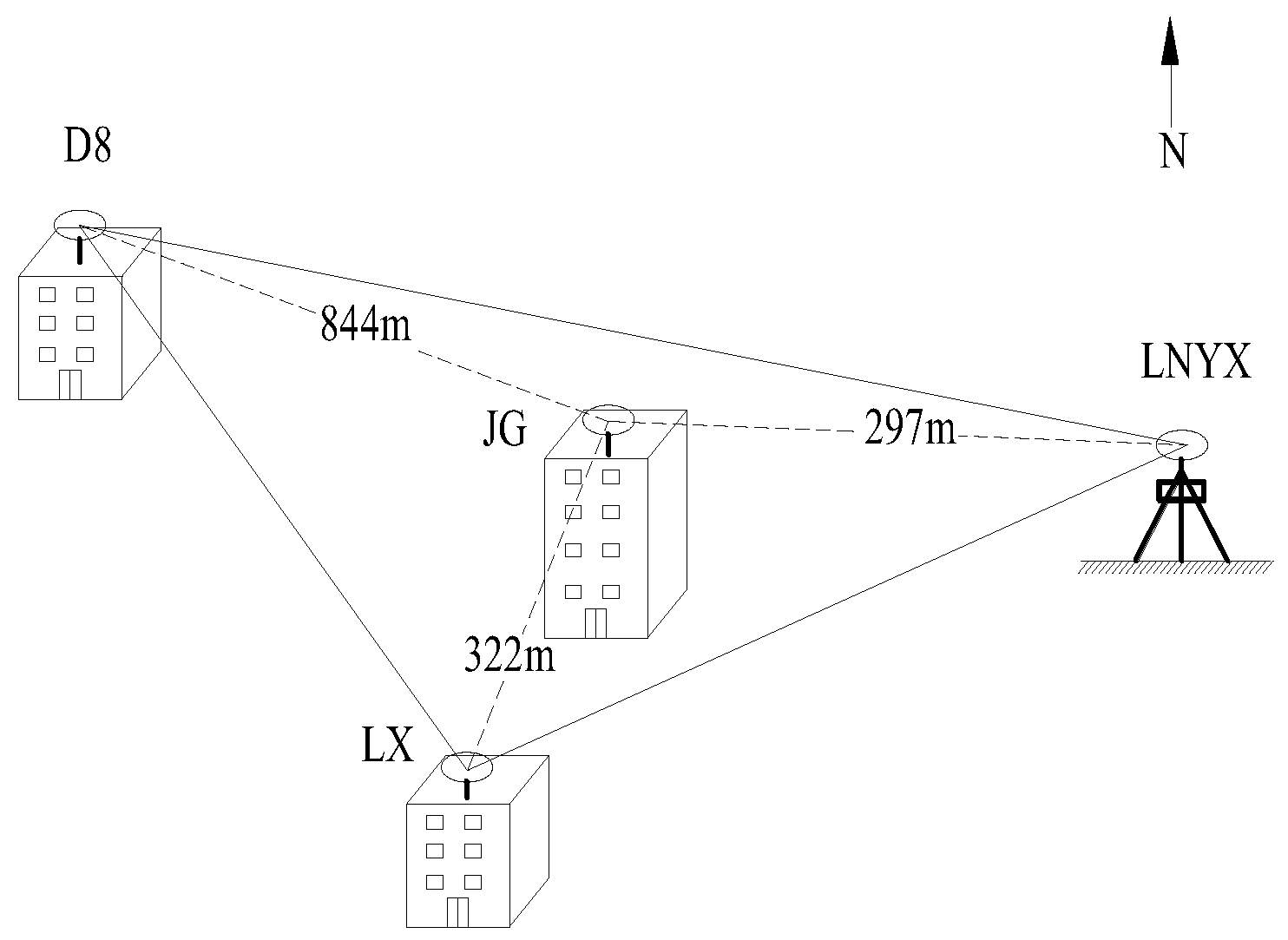
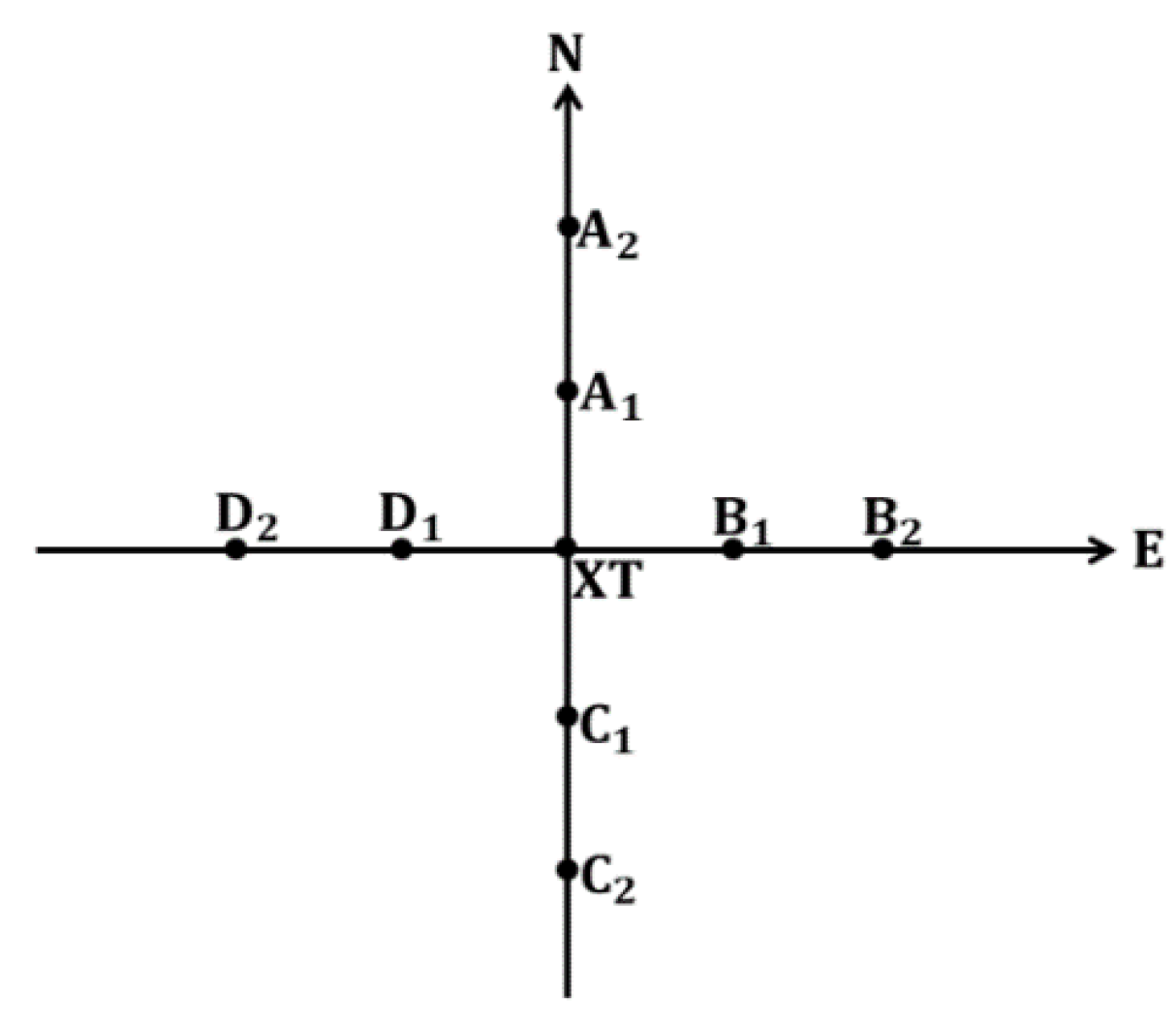
is about 1.6 km according to Equation (11). Finally, eight points along the north-south (A2, A1, C1, and C2) and east-west (B2, B1, D1, and D2) directions are chosen to calculate the deflection of the vertical components (see
Figure 9), The distances from A1, B1, C1, and D1 to XT are about 30 arc seconds, and the distances from A2, B2, C2, and D2 to XT are about 60 arc seconds. The geoid height difference
can be calculated from the GZGEOID model and the EGM2008 and EIGEN-6C4 gravity field models, respectively, and we can obtain the deflection of the vertical components according to Equation (10). The results are shown in
Table 7. The
Table 7 shows that the results from the GZGEOID, EGM2008, and EIGEN-6C4 models have good consistency. The average deflection of the vertical components from the GZGEOID, EGEM2008, and EIGEN-6C4 models are shown in
Table 8, respectively. For instance, the deflection of the vertical component ξ from GZGEOID is the average of 3.80″, 4.25″, 3.91″, and 4.36″, and the deflection of the vertical component η from GZGEOID is the average of −6.04″, −5.80″, −6.04″, and −5.80″, and so on.
5.3. Verticality Monitoring Result of the W Tower
In order to validate/check the result of laser plumbing by comparison with the GNSS result, the GNSS data of the monitoring network consisting of points HG, ZT, LYW, and WT were reprocessed in static mode to obtain the mean coordinate of WT. Then, the systematic bias between the coordinates of a GNSS measurement and a laser plumbing measurement can be calculated by Equations (12) and (13) with the ellipsoidal height of the monitoring point (
hWT = 432.477 m) and the deflection of the vertical components.
Table 8 lists the corresponding corrections of the plane coordinates of the monitoring point (WT). The differences between the coordinates of the laser plumbing and GNSS measurements without corrections are listed in
Table 9.
The coordinates of the GNSS measurement can be corrected with the corrections listed in
Table 8. The differences between the coordinates of the laser plumbing and GNSS measurements with corrections are listed in
Table 10.
In the
x direction, it can be seen that the difference between the coordinates of the GNSS measurement and the laser plumbing measurement has been reduced by the corrections calculated with the deflections of the vertical. However, in the
y direction, it seems that the corrected difference becomes worse. In fact, there are two possibilities. On one hand, the accuracy of deflections of the vertical leads to the results, with a building height of 432 m, when the accuracy of deflections of the vertical is about 1–2 arc seconds, which may lead to a difference of millimeters. On the other hand, the corrected difference may be the actual difference caused by construction and measurement errors. As shown in
Table 10, the difference in position between the GNSS measurement and the laser plumbing measurement is within 2.0 cm after correction. Therefore, when considering such factors as the wind, the operation of a tower crane, and the installation of a curtain wall, one may conclude that the verticality of the W Tower is within 2.0 cm.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}