Microfluidic Technology for Cell Manipulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Microfluidic Manipulation Techniques
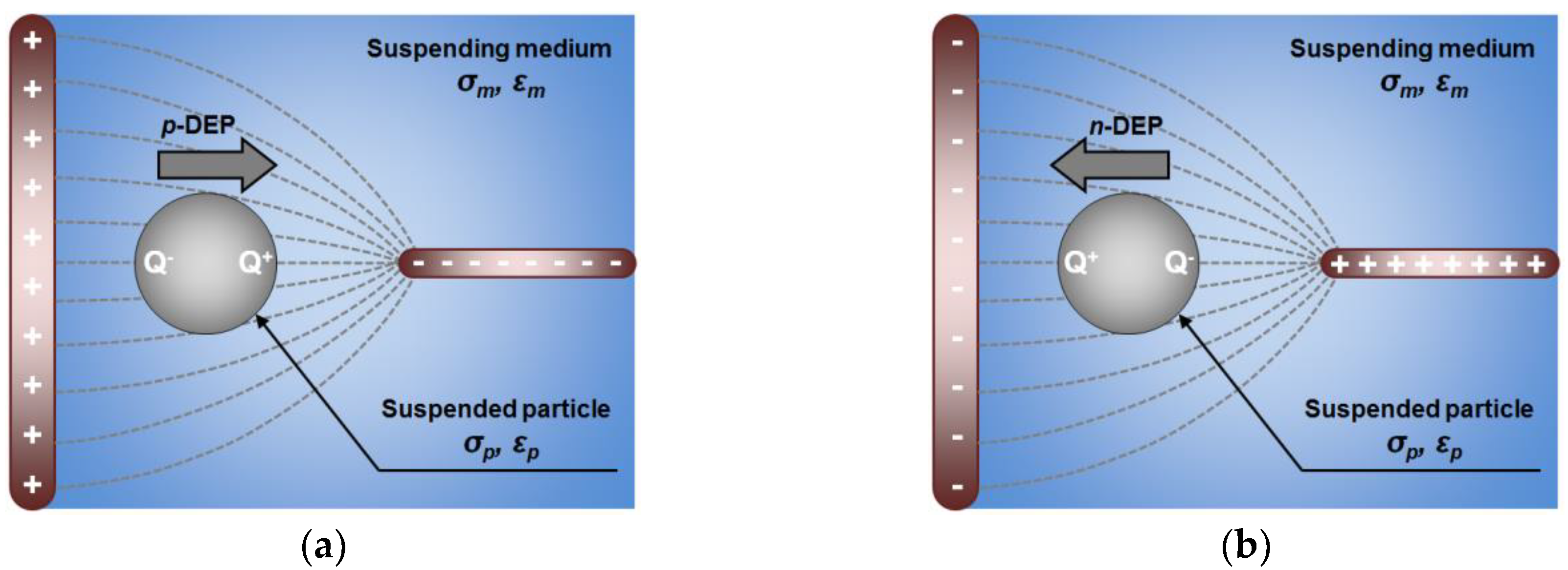
2.1. Dielectrophoresis
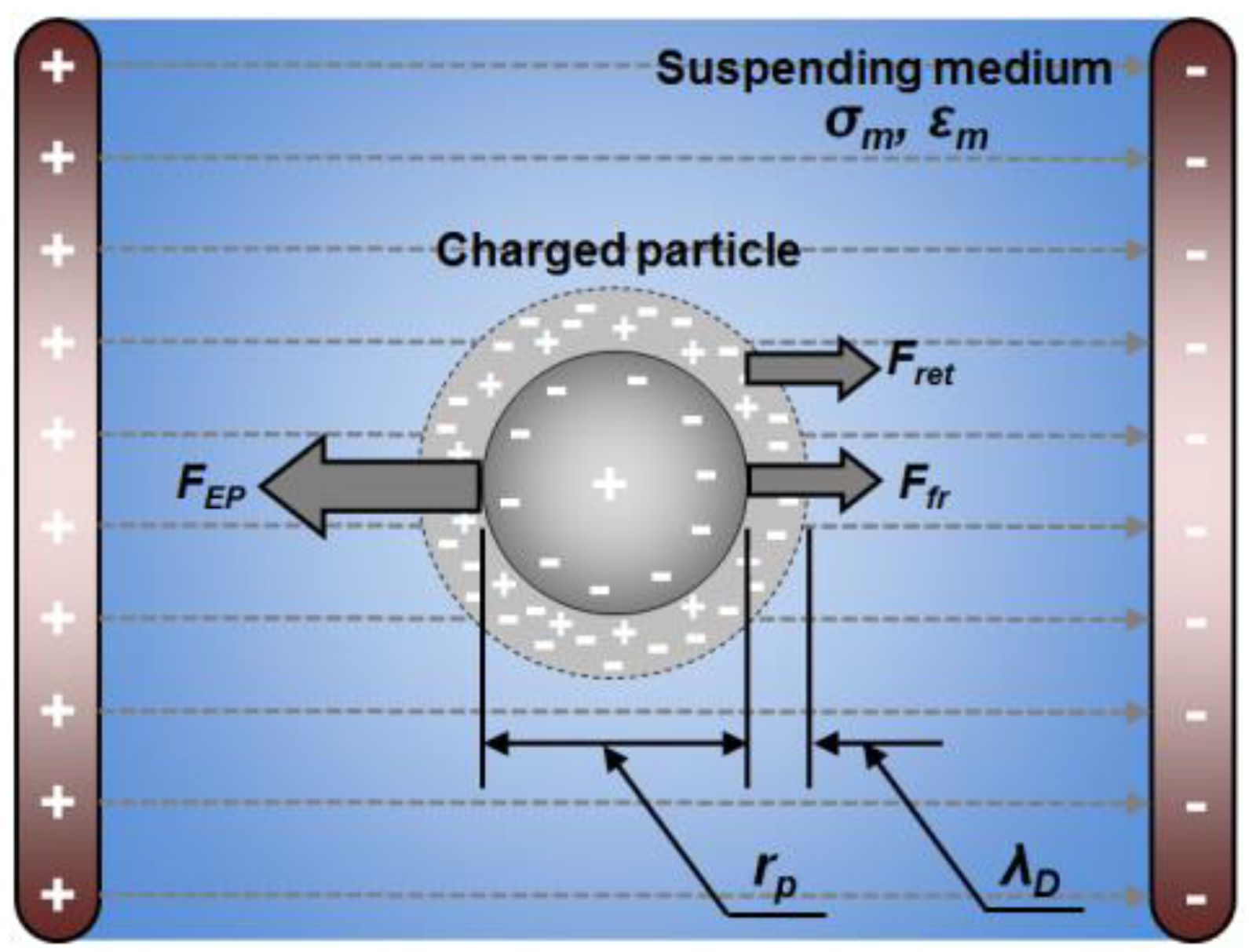
2.2. Electrophoresis
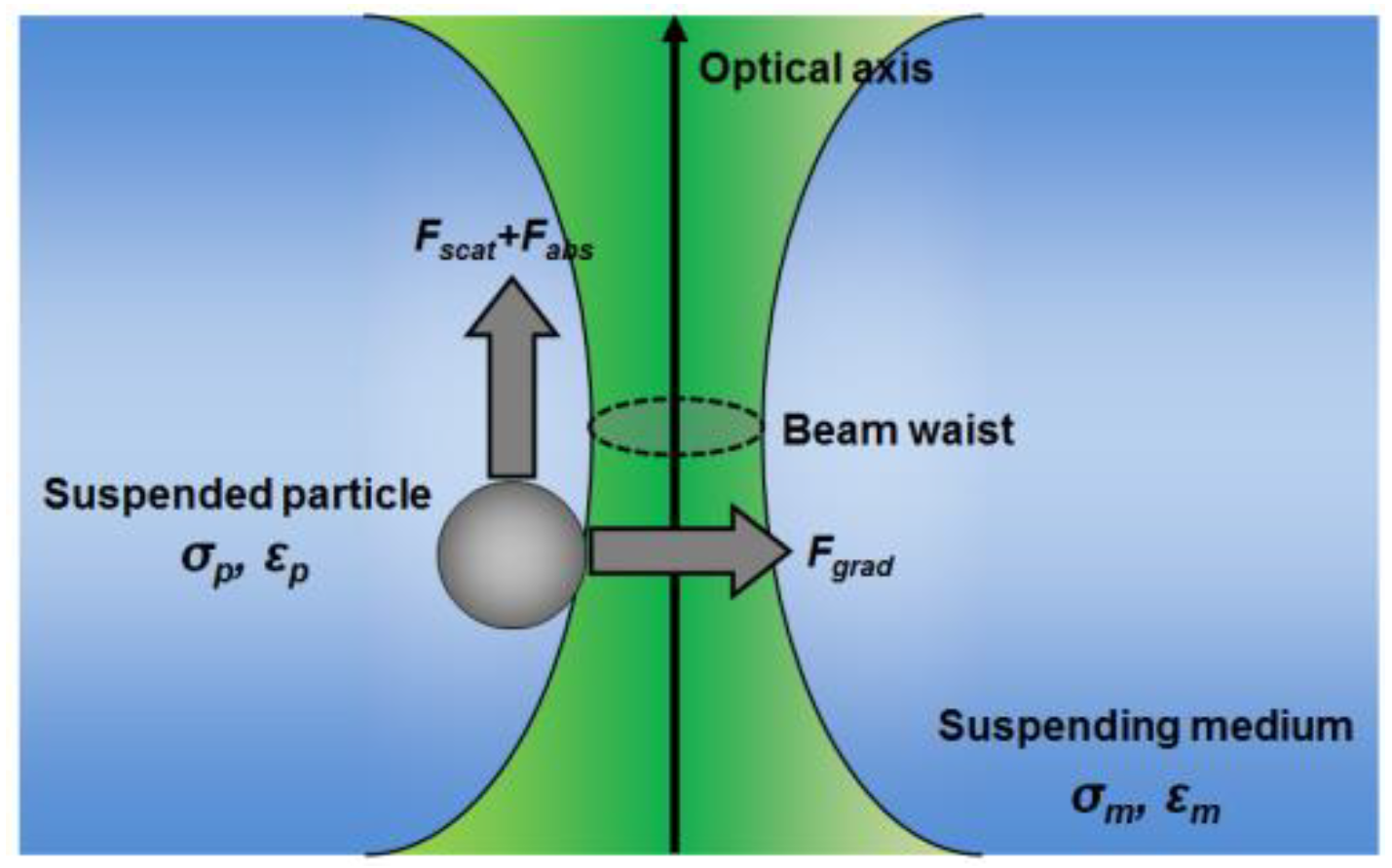
2.3. Optical Tweezers
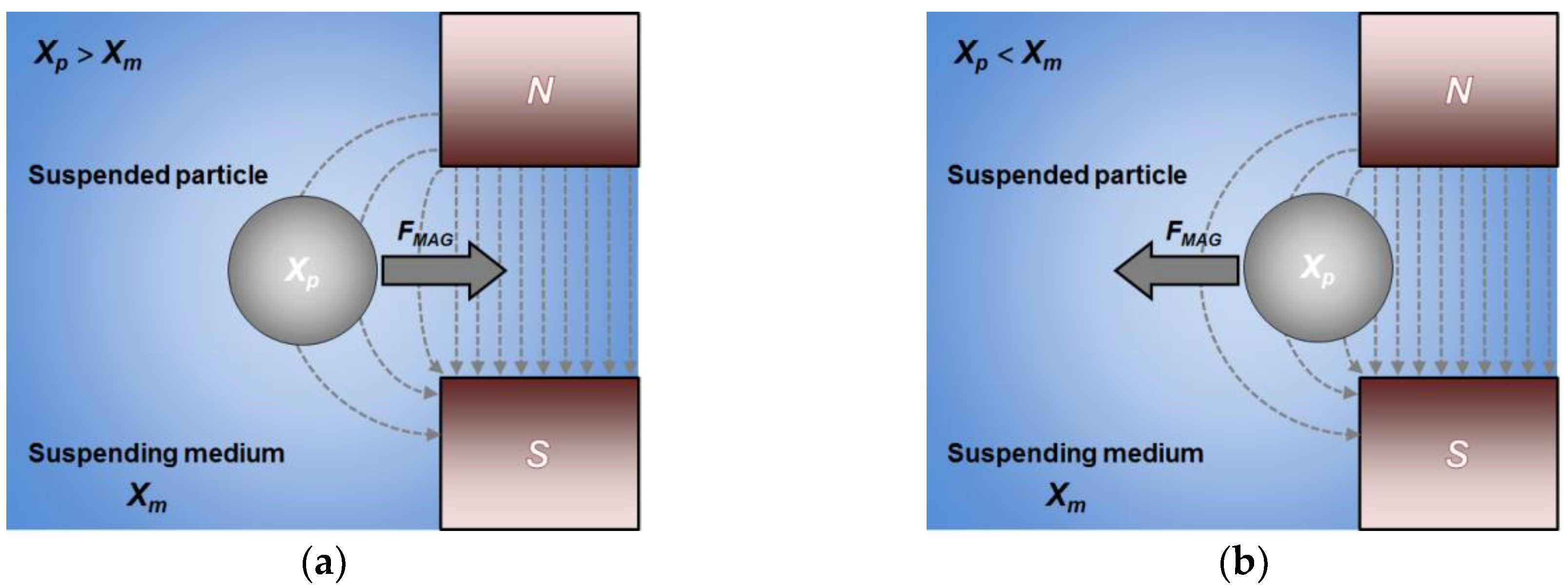
2.4. Magnetophoresis
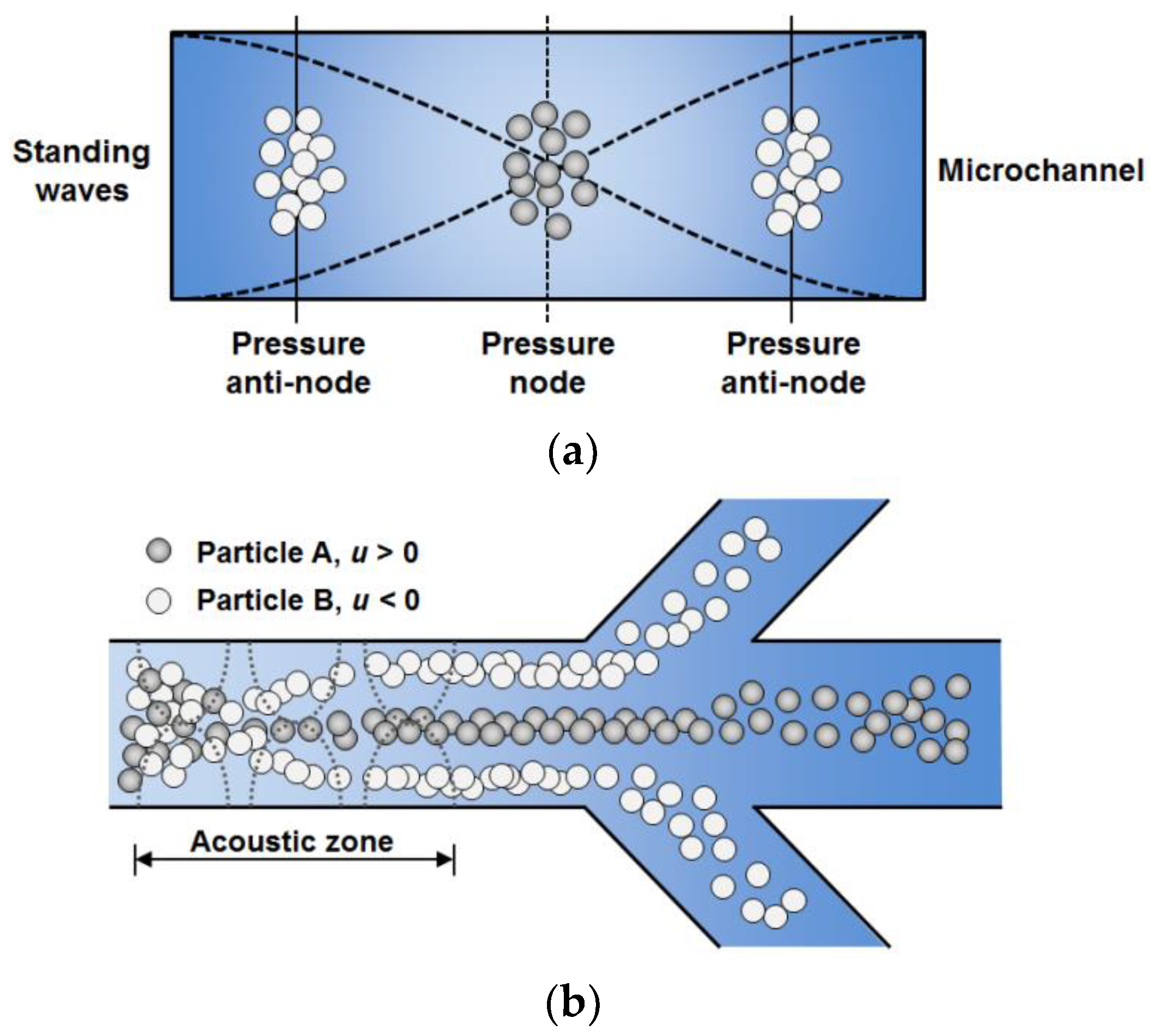
2.5. Acoustophoresis
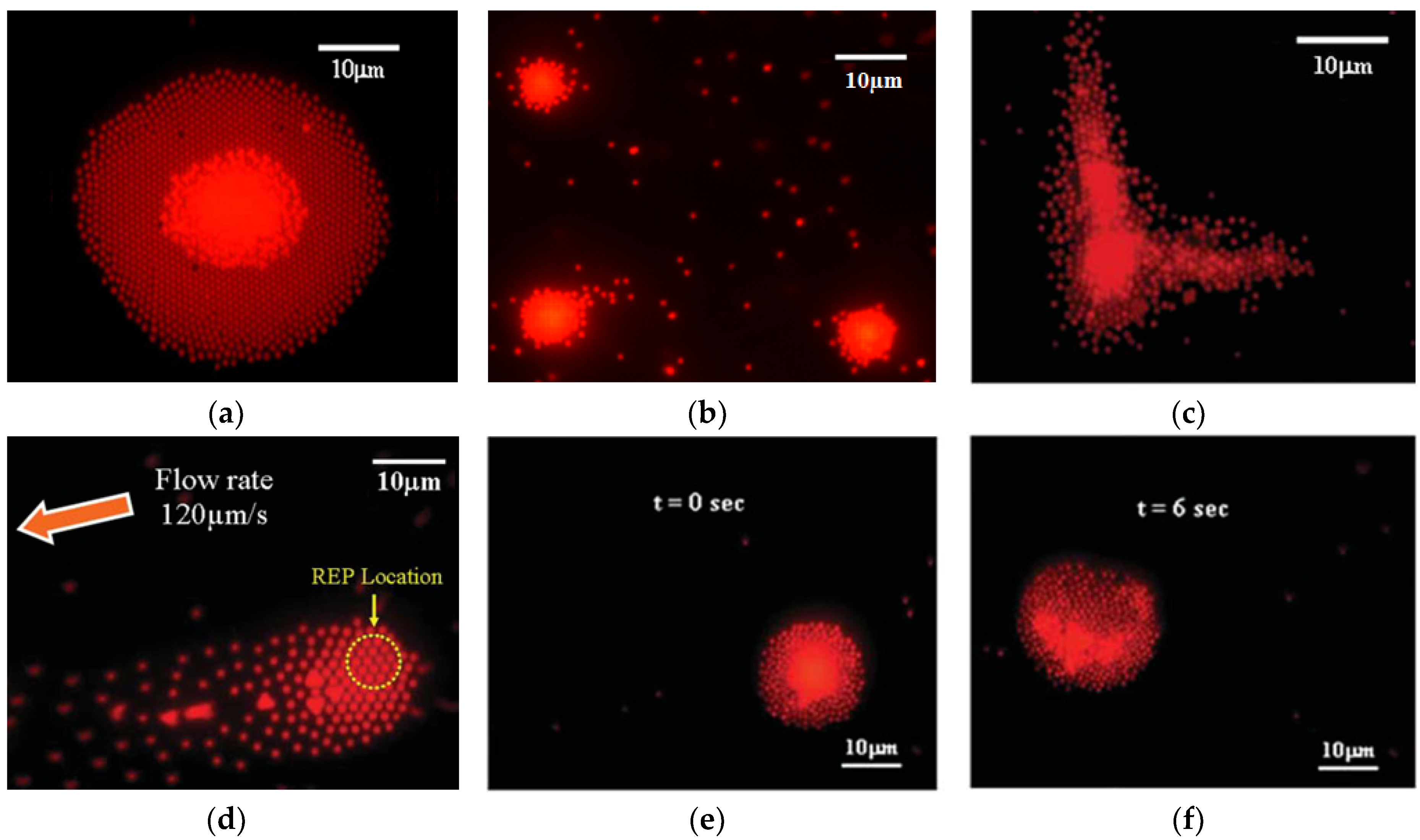
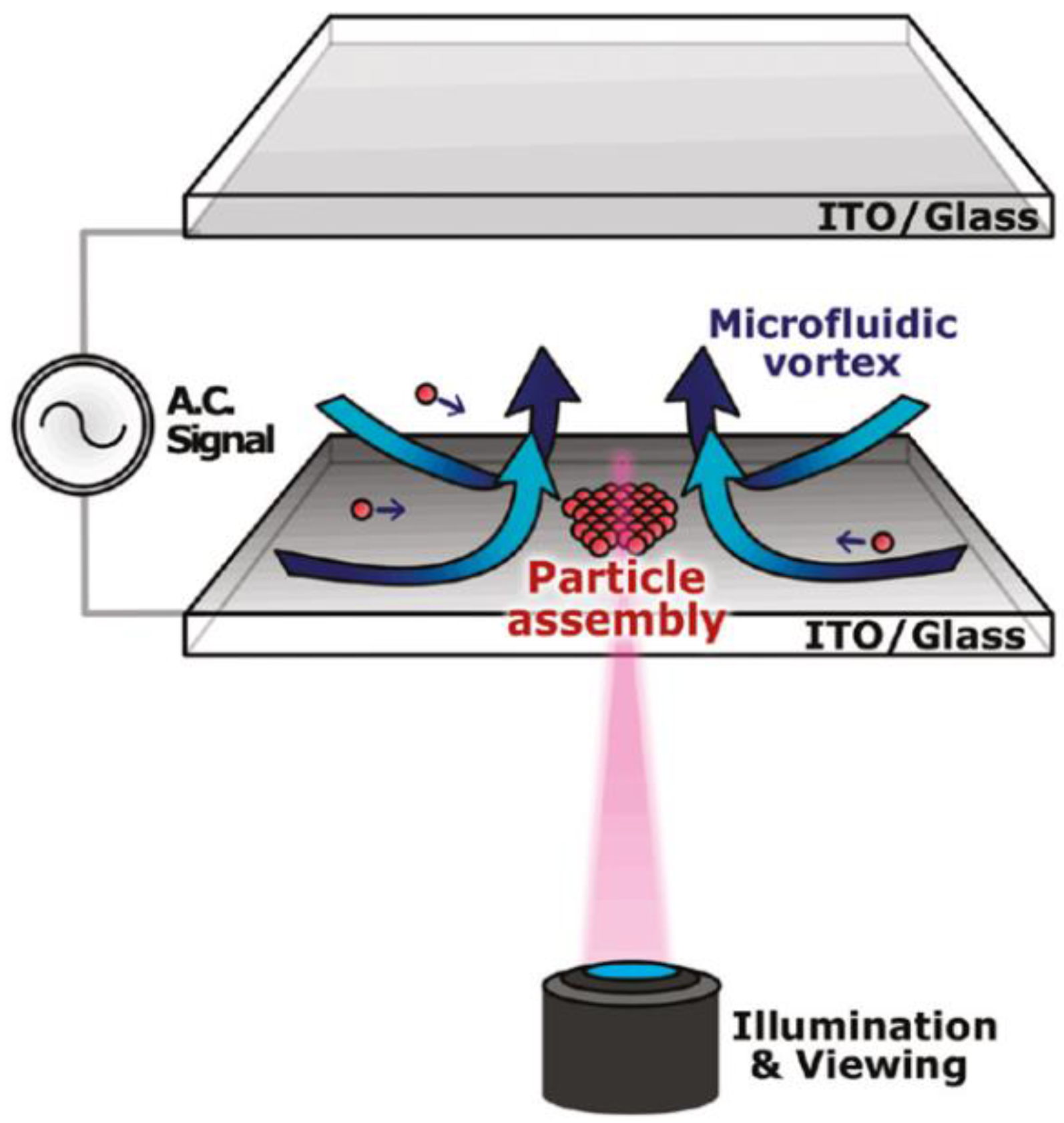
3. Rapid Electrokinetic Patterning
3.1. Driving Environment of REP
3.2. Hybrid Feature of REP
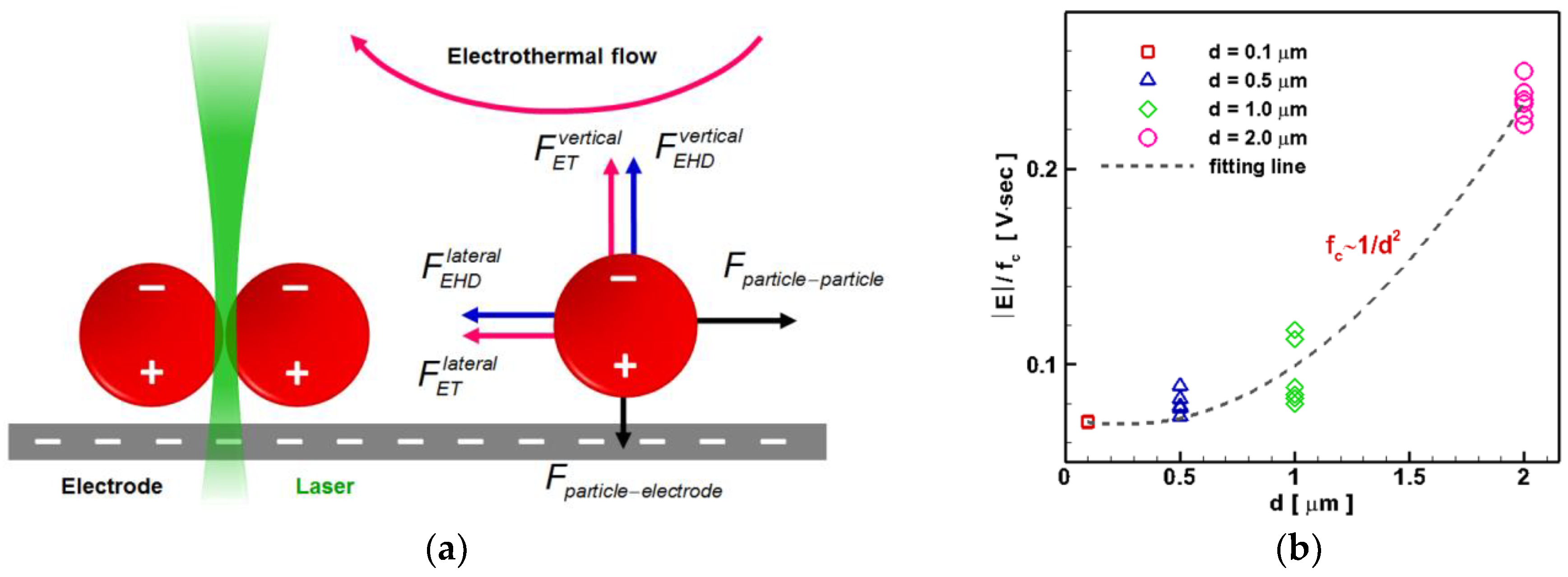
3.3. Opto-Electrokinetic Physics of REP
3.4. Current Challenges of REP
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Whitesides, G.M. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Gravesen, P.; Branebjerg, J.; Jensen, O.S. Microfluidics—A review. J. Micromech. Microeng. 1993, 3, 168–182. [Google Scholar] [CrossRef]
- Yi, C.; Li, C.-W.; Ji, S.; Yang, M. Microfluidics technology for manipulation and analysis of biological cells. Anal. Chim. Acta 2006, 560, 1–23. [Google Scholar] [CrossRef]
- Castillo, J.; Dimaki, M.; Svendsen, W.E. Manipulation of biological samples using micro and nano techniques. Integr. Biol. 2009, 1, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Franke, T.A.; Wixforth, A. Microfluidics for miniaturized laboratories on a chip. ChemPhysChem 2008, 9, 2140–2156. [Google Scholar] [CrossRef] [PubMed]
- Jonáš, A.; Zemánek, P. Light at work: The use of optical forces for particle manipulation, sorting, and analysis. Electrophoresis 2009, 29, 4813–4851. [Google Scholar] [CrossRef] [PubMed]
- Duineveld, P.C. The stability of ink-jet printed lines of liquid with zero receding contact angle on a homogeneous substrate. J. Fluid Mech. 2003, 477, 175–200. [Google Scholar] [CrossRef]
- Soltman, D.; Smith, B.; Kang, H.; Morris, S.J.S.; Subramanian, V. Methodology for inkjet printing of partially wetting films. Langmuir 2010, 26, 15686–15693. [Google Scholar] [CrossRef] [PubMed]
- Soltman, D.; Subramanian, V. Inkjet-printed line morphologies and temperature control of the coffee ring effect. Langmuir 2008, 24, 2224–2231. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.Z.; Zheng, Z.H.; Li, H.W.; Huck, W.T.S.; Sirringhaus, H. Dewetting of conducting polymer inkjet droplets on patterned surfaces. Nat. Mater. 2004, 3, 171–176. [Google Scholar] [CrossRef] [PubMed]
- Jones, K.D.; Nakashima, M.; Bradshaw, C.J.; Papadopoulos, J.; Platzer, M.F. On flow separation control by means of flapping wings. In Bio-Mechanisms of Swimming and Flying; Kato, N., Ayers, J., Morikawa, H., Eds.; Springer: Tokyo, Japan, 2004. [Google Scholar]
- Barber, R.W.; Emerson, D.R. Optimal design of microfluidic networks using biologically inspired principles. Microfluid. Nanofluid. 2007, 4, 179–191. [Google Scholar] [CrossRef]
- Chung, A.J.; Cordovez, B.; Jasuja, N.; Lee, D.J.; Huang, X.T.; Erickson, D. Implantable microfluidic and electronic systems for insect flight manipulation. Microfluid. Nanofluid. 2012, 13, 345–352. [Google Scholar] [CrossRef]
- Nge, P.N.; Rogers, C.I.; Woolley, A.T. Advances in microfluidic materials, functions, integration, and applications. Chem. Rev. 2013, 113, 2550–2583. [Google Scholar] [CrossRef] [PubMed]
- Tesař, V. Microfluidic valves for flow control at low reynolds numbers. J. Vis. 2001, 4, 51–60. [Google Scholar] [CrossRef]
- Arai, F.; Kotani, K.; Maruyama, H.; Honda, A.; Ejima, M. On-chip robotics for biomedical innovation: Manipulation of single virus on a chip. In Proceedings of the 2009 9th IEEE Conference on Nanotechnology (IEEE-NANO), Genoa, Italy, 26–30 July 2009. [Google Scholar]
- Liu, T.L.; Wen, X.; Kung, Y.-C.; Cru, P.-Y.C. Fabrication strategy for micro soft robotics with semiconductor devices integration. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017. [Google Scholar]
- Belder, D. Microfluidics with droplets. Angew. Chem. Int. Ed. 2005, 44, 3521–3522. [Google Scholar] [CrossRef] [PubMed]
- Kerkhoff, H.G. Testing microelectronic biofluidic systems. IEEE Des. Test Comput. 2007, 24, 72–82. [Google Scholar] [CrossRef]
- McDonald, J.C.; Duffy, D.C.; Anderson, J.R.; Chiu, D.T.; Wu, H.; Schueller, O.J.A.; Whitesides, G.M. Fabrication of microfluidic systems in poly(dimethylsiloxane). Electrophoresis 2000, 21, 27–40. [Google Scholar] [CrossRef]
- Bhagat, A.A.S.; Bow, H.; Hou, H.W.; Tan, S.J.; Han, J.; Lim, C.T. Microfluidics for cell separation. Med. Biol. Eng. Comput. 2010, 48, 999–1014. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Bodovitz, S. Single cell analysis: The new frontier in ‘omics’. Trends Biotechnol. 2010, 28, 281–290. [Google Scholar] [CrossRef] [PubMed]
- He, J.-L.; Chen, A.-T.; Lee, J.-H.; Fan, S.-K. Digital microfluidics for manipulation and analysis of a single cell. Int. J. Mol. Sci. 2015, 16, 22319–22332. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.-S.; Wereley, S.T. Towards new methodologies for manipulation of colloidal particles in a miniaturized fluidic device: Optoelectrokinetic manipulation technique. J. Fluids Eng. 2013, 135, 021306. [Google Scholar] [CrossRef]
- Kwon, J.-S.; Ravindranath, S.P.; Kumar, A.; Irudayaraj, J.; Wereley, S.T. Opto-electrokinetic manipulation for high-performance on-chip bioassays. Lab Chip 2012, 12, 4955–4959. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Williams, S.J.; Chuang, H.-S.; Green, N.G.; Wereley, S.T. Hybrid opto-electric manipulation in microfluidics-opportunities and challenges. Lab Chip 2011, 11, 2135–2148. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.; Evander, M.; Hammarström, B.; Laurell, T. Review of cell and particle trapping in microfluidic systems. Anal. Chim. Acta 2009, 649, 141–157. [Google Scholar] [CrossRef] [PubMed]
- Melvin, M. Electrophoresis; John Wiley & Sons: Chichester, UK, 1987. [Google Scholar]
- Kwon, J.-S.; Maeng, J.-S.; Chun, M.-S.; Song, S. Improvement of microchannel geometry subject to electrokinesis and dielectrophoresis using numerical simulations. Microfluid. Nanofluid. 2008, 5, 23–31. [Google Scholar] [CrossRef]
- Kuzyk, A. Dielectrophoresis at the nanoscale. Electrophoresis 2011, 32, 2307–2313. [Google Scholar] [CrossRef] [PubMed]
- Ashkin, A.; Dziedzic, J.M.; Yamane, T. Optical trapping and manipulation of single cells using infrared laser beams. Nature 1987, 330, 769–771. [Google Scholar] [CrossRef] [PubMed]
- Curtis, J.E.; Koss, B.A.; Grier, D.G. Dynamic holographic optical tweezers. Opt. Commun. 2002, 2002, 169–175. [Google Scholar] [CrossRef]
- Kersaudy-Kerhoas, M.; Dhariwal, R.; Desmulliez, M.P.Y. Recent advances in microparticle continuous separation. IET Nanobiotechnol. 2008, 2, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Moffitt, J.R.; Chemla, Y.R.; Smith, S.B.; Bustamante, C. Recent advances in optical tweezers. Annu. Rev. Biochem. 2008, 77, 205–228. [Google Scholar] [CrossRef] [PubMed]
- Kirby, B.J. Micro- and Nanoscale Fluid Mechanics: Transport in Microfluidic Devices; Cambridge University Press: New York, NY, USA, 2013; p. 536. [Google Scholar]
- Pamme, N.; Eijkel, J.C.T.; Manz, A. On-chip free-flow magnetophoresis: Separation and detection of mixtures of magnetic particles in continuous flow. Jo. Magn. Magn. Mater. 2006, 307, 237–244. [Google Scholar] [CrossRef]
- Pamme, N.; Manz, A. On-chip free-flow magnetophoresis: Continuous flow separation of magnetic particles and agglomerates. Anal. Chem. 2004, 76, 7250–7256. [Google Scholar] [CrossRef] [PubMed]
- Suwa, M.; Watarai, H. Magnetoanalysis of micro/nanoparticles: A review. Anal. Chim. Acta 2011, 690, 137–147. [Google Scholar] [CrossRef] [PubMed]
- Friend, J. Microscale acoustofluidics: Microfluidics driven via acoustics and ultrasonics. Rev. Mod. Phys. 2011, 83, 647–704. [Google Scholar] [CrossRef] [Green Version]
- Kayani, A.A.; Khoshmanesh, K.; Ward, S.A.; Mitchell, A.; Kalantar-zadeh, K. Optofluidics incorporating actively controlled micro- and nano-particles. Biomicrofluidics 2012, 6, 031501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Petersson, F.; Åberg, L.; Swärd-Nilsson, A.-M.; Laurell, T. Free flow acoustophoresis: Microfluidic-based mode of particle and cell separation. Anal. Chem. 2007, 79, 5117–5123. [Google Scholar] [CrossRef] [PubMed]
- Gossett, D.R.; Tse, H.T.K.; Lee, S.A.; Ying, Y.; Lindgren, A.G.; Yang, O.O.; Rao, J.; Clark, A.T.; Carlo, D.D. Hydrodynamic stretching of single cells for large population mechanical phenotyping. Proc. Natl. Acad. Sci. USA 2012, 109, 7630–7635. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ekpenyong, A.E.; Whyte, G.; Chalut, K.; Pagliara, S.; Lautenschläger, F.; Fiddler, C.; Paschke, S.; Keyser, U.F.; Chilvers, E.R.; Guck, J. Viscoelastic properties of differentiating blood cells are fate- and function-dependent. PLoS ONE 2012, 7, e45237. [Google Scholar] [CrossRef] [PubMed]
- Bamford, R.A.; Smith, A.; Metz, J.; Glover, G.; Titball, R.W.; Pagliara, S. Investigating the physiology of viable but non-culturable bacteria by microfluidics and time-lapse microscopy. BMC Biol. 2017, 15, 121. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pagliara, S.; Franze, K.; McClain, C.R.; Wylde, G.W.; Fisher, C.L.; Franklin, R.J.M.; Kabla, A.J.; Keyser, U.F.; Chalut, K.J. Auxetic nuclei in embryonic stem cells exiting pluripotency. Nat. Mater. 2014, 13, 638–644. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bhatt, K.H.; Grego, S.; Velev, O.D. An ac electrokinetic technique for collection and concentration of particles and cells on patterned electrodes. Langmuir 2005, 21, 6603–6612. [Google Scholar] [CrossRef] [PubMed]
- Hwang, H. Rapid and selective concentration of microparticles in an optoelectrofluidic platform. Lab Chip 2009, 9, 199–206. [Google Scholar] [CrossRef] [PubMed]
- Lapizco-Encinas, B.H.; Simmons, B.A.; Cummings, E.B.; Fintschenko, Y. Insulator-based dielectrophoresis for the selective concentration and separation of live bacteria in water. Electrophoresis 2004, 25, 1695–1704. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Friend, J.R.; Yeo, L.Y. Surface acoustic wave concentration of particle and bioparticle suspensions. Biomed. Microdev. 2007, 9, 647–656. [Google Scholar] [CrossRef] [PubMed]
- Jones, T.B. Electromechanics of Particles; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Pohl, H.A. Dielectrophoresis: The Behavior of Neutral Matter in Nonuniform Electric Fields; Cambridge University Press: New York, NY, USA, 1978. [Google Scholar]
- Gaš, B. Theory of electrophoresis: Fate of one equation. Electrophoresis 2009, 30, S7–S15. [Google Scholar] [CrossRef] [PubMed]
- Klepárník, K.; Boček, P. Electrophoresis today and tomorrow: Helping biologists’ dreams come true. BioEssays 2010, 32, 218–226. [Google Scholar] [CrossRef] [PubMed]
- Arai, F.; Ng, C.; Maruyama, H.; Ichikawa, A.; El-Shimy, H.; Fukuda, T. On chip single-cell separation and immobilization using optical tweezers and thermosensitive hydrogel. Lab Chip 2005, 5, 1399–1403. [Google Scholar] [CrossRef] [PubMed]
- Lenshof, A.; Laurell, T. Continuous separation of cells and particles in microfluidic systems. Chem. Soc. Rev. 2010, 39, 1203–1217. [Google Scholar] [CrossRef] [PubMed]
- Chiou, P.Y.; Ohta, A.T.; Wu, M.C. Massively parallel manipulation of single cells and microparticles using optical images. Nature 2005, 436, 370–372. [Google Scholar] [CrossRef] [PubMed]
- Jamshidi, A.; Neale, S.L.; Yu, K.; Pauzauskie, P.J.; Schuck, P.J.; Valley, J.K.; Hsu, H.-Y.; Ohta, A.T.; Wu, M.C. Nanopen: Dynamic, low-power, and light-actuated patterning of nanoparticles. Nano Lett. 2009, 9, 2921–2925. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Kwon, J.-S.; Williams, S.J.; Green, N.G.; Yip, N.K.; Wereley, S.T. Optically modulated electrokinetic manipulation and concentration of colloidal particles near an electrode surface. Langmuir 2010, 26, 5262–5272. [Google Scholar] [CrossRef] [PubMed]
- Seo, H.-K.; Kim, Y.-H.; Kim, H.-O.; Kim, Y.-J. Hybrid cell sorters for on-chip cell separation by hydrodynamics and magnetophoresis. J. Micromech. Microeng. 2010, 20, 95019. [Google Scholar] [CrossRef]
- Kumar, A.; Kwon, J.-S.; Williams, S.J. A novel optically driven electrokinetic technique for manipulating nanoparticles. Proc. SPIE 2009, 7400, 7400V. [Google Scholar]
- Williams, S.J.; Kumar, A.; Green, N.G.; Wereley, S.T. A simple, optically induced electrokinetic method to concentrate and pattern nanoparticles. Nanoscale 2009, 1, 133–137. [Google Scholar] [CrossRef] [PubMed]
- Williams, S.J.; Kumar, A.; Green, N.G.; Wereley, S.T. Optically induced electrokinetic concentration and sorting of colloids. J. Micromech. Microeng. 2010, 20, 548–558. [Google Scholar] [CrossRef]
- Williams, S.J.; Kumar, A.; Wereley, S.T. Electrokinetic patterning of colloidal particles with optical landscapes. Lab Chip 2008, 8, 1879–1882. [Google Scholar] [CrossRef] [PubMed]
- Kwon, J.-S.; Thakur, R.; Wereley, S.T. Rapid electrokinetic patterning. In Encyclopedia of Nanotechnology; Bhushan, B., Ed.; Springer: Dordrecht, The Netherlands, 2012. [Google Scholar]
- Cheng, I.-F.; Chang, H.-C. An integrated dielectrophoretic chip for continuous bioparticle filtering, focusing, sorting, trapping, and detecting. Biomicrofluidics 2007, 1, 21503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gascoyne, P.R.C.; Vykoukal, J. Particle separation by dielectrophoresis. Electrophoresis 2002, 23, 1973–1983. [Google Scholar] [CrossRef]
- Green, N.G.; Morgan, H. Dielectrophoresis of submicrometer latex spheres. 1. Experimental results. J. Phys. Chem. B 1999, 103, 41–50. [Google Scholar] [CrossRef]
- Hawkins, B.G.; Smith, A.E.; Syed, Y.A.; Kirby, B.J. Continuous-flow particle separation by 3d insulative dielectrophoresis using coherently shaped, dc-biased, ac electric fields. Anal. Chem. 2007, 79, 7291–7300. [Google Scholar] [CrossRef] [PubMed]
- Kang, K.H.; Kang, Y.; Xuan, X.; Li, D. Continuous separation of microparticles by size with direct current-dielectrophoresis. Electrophoresis 2006, 27, 694–702. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Koklu, M.; Beskok, A. Particle trapping in high-conductivity media with electrothermally enhanced negative dielectrophoresis. Anal. Chem. 2009, 81, 2303–2310. [Google Scholar] [CrossRef] [PubMed]
- Morgan, H. Dielectrophoresis. In Encyclopedia of Microfluidics and Nanofluidics; Li, D., Ed.; Springer: New York, NY, USA, 2008; pp. 350–357. [Google Scholar]
- Morgan, H.; Green, N.G. Ac Electrokinetics: Colloids and Nanoparticles; Research Studies Press LTD.: Baldock, UK, 2002; Volume 2, p. 326. [Google Scholar]
- Cheng, I.-F.; Lin, C.-C.; Lin, D.-Y.; Chang, H.-C. A dielectrophoretic chip with a roughened metal surface for on-chip surface-enhanced raman scattering analysis of bacteria. Biomicrofluidics 2010, 4, 034104. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Khoshmanesh, K.; Mitchell, A.; Kalantar-zadeh, K. Dielectrophoresis for manipulation of micro/nano particles in microfluidic systems. Anal. Bioanal. Chem. 2010, 396, 401–420. [Google Scholar] [CrossRef] [PubMed]
- Washizu, M.; Jones, T.B. Multipolar dielectrophoretic force calculation. J. Electrost. 1994, 33, 187–198. [Google Scholar] [CrossRef]
- Arnold, W.M.; Schwan, H.P.; Zimmermann, U. Surface conductance and other properties of latex particles measured by electrorotation. J. Phys. Chem. B 1987, 91, 5093–5098. [Google Scholar] [CrossRef]
- Morgan, H.; Hughes, M.P.; Green, N.G. Separation of submicron bioparticles by dielectrophoresis. Biophys. J. 1999, 77, 516–525. [Google Scholar] [CrossRef]
- Choi, E.; Kim, B.; Park, J. High-throughput microparticle separation using gradient traveling wave dielectrophoresis. J. Micromech. Microeng. 2009, 19, 125014. [Google Scholar] [CrossRef]
- Vahey, M.D.; Voldman, J. An equilibrium method for continuous-flow cell sorting using dielectrophoresis. Anal. Chem. 2008, 80, 3135–3143. [Google Scholar] [CrossRef] [PubMed]
- Kung, Y.C.; Huang, K.W.; Chong, W.; Chiou, P.Y. Tunnel dielectrophoresis for tunable, single-stream cell focusing in physiological buffers in high-speed microfluidic flows. Small 2016, 12, 4343–4348. [Google Scholar] [CrossRef] [PubMed]
- Kung, Y.-C.; Huang, K.-W.; Fan, Y.-J.; Chiou, P.-Y. Fabrication of 3d high aspect ratio pdms microfluidic networks with a hybrid stamp. Lab Chip 2015, 15, 1861–1868. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Flanagan, L.A.; Jeon, N.L.; Monuki, E.; Lee, A.P. Dielectrophoresis switching with vertical sidewall electrodes for microfluidic flow cytometry. Lab Chip 2007, 7, 1114–1120. [Google Scholar] [CrossRef] [PubMed]
- Fonslow, B.R.; Bowser, M.T. Free-flow electrophoresis on an anodic bonded glass microchip. Anal. Chem. 2005, 77, 5706–5710. [Google Scholar] [CrossRef] [PubMed]
- Hannig, K.; Wirth, H.; Meyer, B.-H.; Zeiller, K. Free-flow electrophoresis I. Theoretical and experimental investigations of the influence of mechanical and electrokinetic variables on the efficiency of the method. Biol. Chem. 1975, 356, 1209–1224. [Google Scholar] [CrossRef]
- Hunter, R.J.; Ottewill, R.H.; Rowell, R.L. Zeta Potential in Colloid Science: Principles and Applications; Academic Press: London, UK, 1989; p. 398. [Google Scholar]
- Deyl, Z. Electrophoresis. A Survey of Techniques and Applications; Elsevier Science Ltd.: New York, NY, USA, 1982. [Google Scholar]
- Schneyer, A.L.; Sluss, P.M.; Bosukonda, D.; Leo, E.; Reichert, J. Electrophoretic purification of radioiodinated follicle-stimulating hormone for radioligand receptor assay and radioimmunoassay. Endocrinology 1986, 119, 1446–1453. [Google Scholar] [CrossRef] [PubMed]
- Hlaváček, A.; Sedlmeier, A.; Skládal, P.; Gorris, H.H. Electrophoretic characterization and purification of silica-coated photon-upconverting nanoparticles and their bioconjugates. Appl. Mater. Interfaces 2014, 6, 6930–6935. [Google Scholar] [CrossRef] [PubMed]
- Radko, S.P.; Chrambach, A. Capillary zone electrophoresis of rigid submicron-sized particles in polyacrylamide solution selectivity, peak spreading and resolution. J. Chromatogr. A 1999, 848, 443–455. [Google Scholar] [CrossRef]
- Li, F.; Hill, R.J. Nanoparticle gel electrophoresis: Bare charged spheres in polyelectrolyte hydrogels. J. Colloid Interface Sci. 2013, 394, 1–12. [Google Scholar] [CrossRef] [PubMed]
- De Jesus, D.P.; Blanes, L.; de Lago, C.L. Microchip free-flow electrophoresis on glass substrate using laser-printing toner as structural material. Electrophoresis 2006, 27, 4935–4942. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, H.; Shimamura, K.; Akaida, T.; Sakano, K.; Tajima, N.; Funazaki, J.; Suzuki, H.; Shinohara, E. Free-flow electrophoresis in a microfabricated chamber with a micromodule fraction separator: Continuous separation of proteins. J. Chromatogr. A 2003, 990, 169–178. [Google Scholar] [CrossRef]
- Kohlheyer, D.; Besselink, G.A.J.; Schlautmann, S.; Schasfoort, R.B.M. Free-flow zone electrophoresis and isoelectric focusing using a microfabricated glass device with ion permeable membranes. Lab Chip 2006, 6, 374–380. [Google Scholar] [CrossRef] [PubMed]
- Kremser, L.; Blaas, D.; Kenndler, E. Capillary electrophoresis of biological particles: Viruses, bacteria, and eukaryotic cells. Electrophoresis 2004, 25, 2282–2291. [Google Scholar] [CrossRef] [PubMed]
- Roman, M.C.; Brown, P.R. Free-flow electrophoresis as a preparative separation technique. Anal. Chem. 1994, 66, 86A–94A. [Google Scholar] [CrossRef]
- Turgeon, R.T.; Bowser, M.T. Micro free-flow electrophoresis: Theory and applications. Anal. Bioanal. Chem. 2009, 394, 187–198. [Google Scholar] [CrossRef] [PubMed]
- Erickson, D.; Serey, X.; Chen, Y.-F.; Mandal, S. Nanomanipulation using near field photonics. Lab Chip 2011, 11, 995–1009. [Google Scholar] [CrossRef] [PubMed]
- Svoboda, K.; Block, S.M. Optical trapping of metallic rayleigh particles. Opt. Lett. 1994, 9, 930–932. [Google Scholar] [CrossRef]
- Morris, V.J. Atomic force microscopy (AFM) and related tools for the imaging of foods and beverages on the nanoscale. In Nanotechnology in the Food, Beverage and Nutraceutical Industries, 1st ed.; Huang, Q., Ed.; Woodhead Publishing: Cambridge, UK, 2014; pp. 99–148. [Google Scholar]
- Smith, S.P.; Bhalotra, S.R.; Brody, A.L.; Brown, B.L.; Boyda, E.K.; Prentiss, M. Inexpensive optical tweezers for undergraduate laboratories. Am. J. Phys. 1999, 67, 26–35. [Google Scholar] [CrossRef]
- Block, S.M.; Blair, D.F.; Berg, H.C. Compliance of bacterial flagella measured with optical tweezers. Nature 1989, 338, 514–518. [Google Scholar] [CrossRef] [PubMed]
- Pshenichnikov, A.F.; Ivanov, A.S. Magnetophoresis of particles and aggregates in concentrated magnetic fluids. Phys. Rev. E 2012, 86, 051401. [Google Scholar] [CrossRef] [PubMed]
- Watarai, H.; Suwa, M.; Iiguni, Y. Magnetophoresis and electromagnetophoresis of microparticles in liquids. Anal. Bioanal. Chem. 2004, 378, 1693–1699. [Google Scholar] [CrossRef] [PubMed]
- Peyman, S.A.; Kwan, E.Y.; Margarson, O.; Iles, A.; Pamme, N. Diamagnetic repulsion—A versatile tool for label-free particle handling in microfluidic devices. J. Chromatogr. A 2009, 1216, 9055–9062. [Google Scholar] [CrossRef] [PubMed]
- Rodríguez-Villarreal, A.I.; Tarn, M.D.; Madden, L.A.; Lutz, J.B.; Greenman, J.; Samitier, J.; Pamme, N. Flow focussing of particles and cells based on their intrinsic properties using a simple diamagnetic repulsion setup. Lab Chip 2011, 11, 1240–1248. [Google Scholar] [CrossRef] [PubMed]
- Pamme, N. Magnetism and microfluidics. Lab Chip 2006, 6, 24–38. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Evander, M.; Lenshof, A.; Laurell, T.; Nilsson, J. Acoustophoresis in wet-etched glass chips. Anal. Chem. 2008, 80, 5178–5185. [Google Scholar] [CrossRef] [PubMed]
- Pamme, N. Continuous flow separations in microfluidic devices. Lab Chip 2007, 7, 1644–1659. [Google Scholar] [CrossRef] [PubMed]
- Velasco, V.; Work, J.A.H.; Williams, S.J. Electrokinetic concentration and patterning of colloids with a scanning laser. Electrophoresis 2012, 33, 1931–1937. [Google Scholar] [CrossRef] [PubMed]
- Green, N.G.; Ramos, A.; González, A.; Castellanos, A.; Morgan, H. Electric field induced fluid flow on microelectrodes: The effect of illumination. J. Phys. D Appl. Phys. 2000, 33, L13–L17. [Google Scholar] [CrossRef]
- Green, N.G.; Ramos, A.; González, A.; Castellanos, A.; Morgan, H. Electrothermally induced fluid flow on microelectrodes. J. Electrost. 2001, 53, 71–81. [Google Scholar] [CrossRef]
- Green, N.G.; Ramos, A.; González, A.; Morgan, H.; Castellanos, A. Fluid flow induced by nonuniform ac electric fields in electrolytes on microelectrodes. I. Experimental measurements. Phys. Rev. E 2000, 61, 4011–4018. [Google Scholar] [CrossRef] [Green Version]
- Green, N.G.; Ramos, A.; González, A.; Morgan, H.; Castellanos, A. Fluid flow induced by nonuniform ac electric fields in electrolytes on microelectrodes. III. Observation of streamlines and numerical simulation. Phys. Rev. E 2002, 66, 26305–26311. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Cierpka, C.; Williams, S.J.; Kähler, C.J.; Wereley, S.T. 3d3c velocimetry measurements of an electrothermal microvortex using wavefront deformation ptv and a single camera. Microfluid. Nanofluid. 2011, 10, 355–365. [Google Scholar] [CrossRef]
- Kumar, A.; Williams, S.J.; Wereley, S.T. Experiments on opto-electrically generated microfluidic vortices. Microfluid. Nanofluid. 2009, 6, 637–646. [Google Scholar] [CrossRef]
- Kwon, J.S.; Wereley, S.T. Light-actuated electrothermal microfluidic motion: Experimental investigation and physical interpretation. Microfluid. Nanofluid. 2015, 19, 609–619. [Google Scholar] [CrossRef]
- Ramos, A.; Morgan, H.; Green, N.G.; Castellanos, A. Ac electrokinetics: A review of forces in microelectrode structures. J. Phys. D Appl. Phys. 1998, 31, 2338–2353. [Google Scholar] [CrossRef]
- Kumar, A.; Chuang, H.-S.; Wereley, S.T. Dynamic manipulation by light and electric fields: Micrometer particles to microliter droplets. Langmuir 2010, 26, 7656–7660. [Google Scholar] [CrossRef] [PubMed]
- Fagan, J.A.; Sides, P.J.; Prieve, D.C. Vertical oscillatory motion of a single colloidal particle adjacent to an electrode in an ac electric field. Langmuir 2002, 18, 7810–7820. [Google Scholar] [CrossRef]
- Fagan, J.A.; Sides, P.J.; Prieve, D.C. Vertical motion of a charged colloidal particle near an ac polarized electrode with a nonuniform potential distribution: Theory and experimental evidence. Langmuir 2004, 20, 4823–4834. [Google Scholar] [CrossRef] [PubMed]
- Fagan, J.A.; Sides, P.J.; Prieve, D.C. Evidence of multiple electrohydrodynamic forces acting on colloical particle near an electrode due to an alternating current electric field. Langmuir 2005, 21, 1784–1794. [Google Scholar] [CrossRef] [PubMed]
- Fagan, J.A.; Sides, P.J.; Prieve, D.C. Mechanism of rectified lateral motion of particles near electrodes in alternating electric fields below 1 khz. Langmuir 2006, 22, 9846–9852. [Google Scholar] [CrossRef] [PubMed]
- Ristenpart, W.D.; Aksay, I.A.; Saville, D.A. Electrically guided assembly of planar superlattices in binary colloidal suspensions. Phys. Rev. Lett. 2003, 90, 128303. [Google Scholar] [CrossRef] [PubMed]
- Ristenpart, W.D.; Aksay, I.A.; Saville, D.A. Assembly of colloidal aggregates by electrohydrodynamic flow: Kinetic experiments and scaling analysis. Phys. Rev. E 2004, 69, 214051–214058. [Google Scholar] [CrossRef] [PubMed]
- Ristenpart, W.D.; Aksay, I.A.; Saville, D.A. Electrohydrodynamic flow around a colloidal particle near an electrode with an oscillating potential. J. Fluid Mech. 2007, 575, 83–109. [Google Scholar] [CrossRef]
- Ristenpart, W.D.; Jiang, P.; Slowik, M.A.; Punckt, C.; Saville, D.A.; Aksay, I.A. Electrohydrodynamic flow and colloidal patterning near inhomogeneities on electrodes. Langmuir 2008, 24, 12172–12180. [Google Scholar] [CrossRef] [PubMed]
- Work, A.H., Jr.; Williams, S.J. Characterization of 2d colloid aggregations created by optically induced electrohydrodynamics. Electrophoresis 2015, 36, 1674–1680. [Google Scholar] [CrossRef]
- Work, A.H., Jr.; Williams, S.J. Characterization of 2d colloids assembled by optically-induced electrohydrodynamics. Soft Matter 2015, 11, 4266–4272. [Google Scholar] [CrossRef]
- Wang, K.-C.; Kumar, A.; Williams, S.J.; Green, N.G.; Kim, K.C.; Chuang, H.-S. An optoelectrokinetic technique for programmable particle manipulation and bead-based biosignal enhancement. Lab Chip 2014, 14, 3958–3967. [Google Scholar] [CrossRef] [PubMed]
- Mishra, A.; Maltais, T.R.; Walter, T.M.; Wei, A.; Williams, S.J.; Wereley, S.T. Trapping and viability of swimming bacteria in an optoelectric trap. Lab Chip 2016, 16, 1039–1046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mishra, A.; Clayton, K.; Velasco, V.; Williams, S.J.; Wereley, S.T. Dynamic optoelectric trapping and deposition of multiwalled carbon nanotubes. Microsyst. Nanoeng. 2016, 2, 16005. [Google Scholar] [CrossRef] [Green Version]
- Velasco, V.; Williams, S.J. Electrokinetic concentration, patterning, and sorting of colloids with thin film heaters. J. Colloid Interface Sci. 2013, 394, 598–603. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Götzinger, M.; Peukert, W. The influence of particle charge and roughness on particle—Substrate adhesion. Powder Technol. 2003, 135–136, 82–91. [Google Scholar] [CrossRef]










© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwon, J.-S.; Oh, J.H. Microfluidic Technology for Cell Manipulation. Appl. Sci. 2018, 8, 992. https://doi.org/10.3390/app8060992
Kwon J-S, Oh JH. Microfluidic Technology for Cell Manipulation. Applied Sciences. 2018; 8(6):992. https://doi.org/10.3390/app8060992
Chicago/Turabian StyleKwon, Jae-Sung, and Je Hoon Oh. 2018. "Microfluidic Technology for Cell Manipulation" Applied Sciences 8, no. 6: 992. https://doi.org/10.3390/app8060992
APA StyleKwon, J. -S., & Oh, J. H. (2018). Microfluidic Technology for Cell Manipulation. Applied Sciences, 8(6), 992. https://doi.org/10.3390/app8060992