Quantitative Deterioration Assessment of Road Bridge Decks Based on Site Inspected Cracks

Abstract
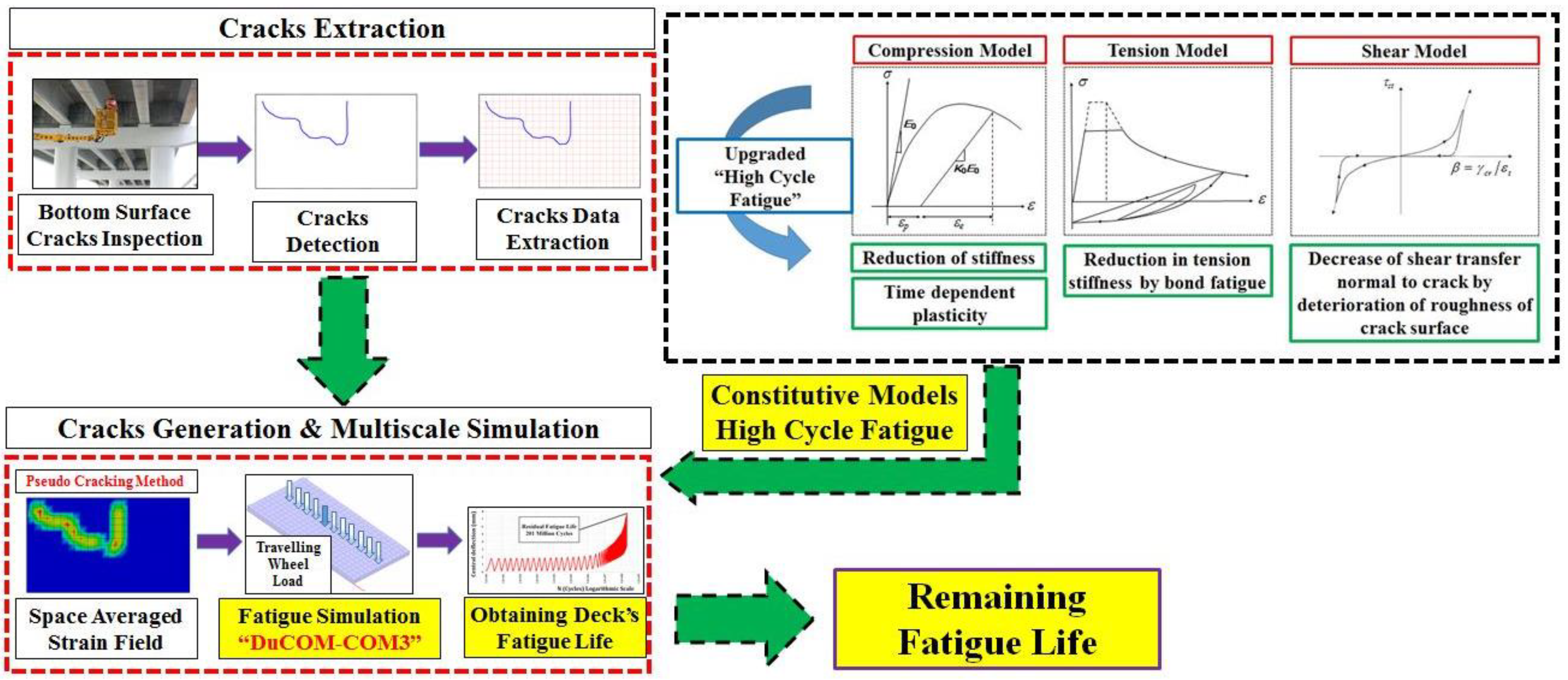
:1. Introduction
2. Artificial Neural Network
3. Building Neural Networks
3.1. Scope of Target
3.2. Material Properties for Reference
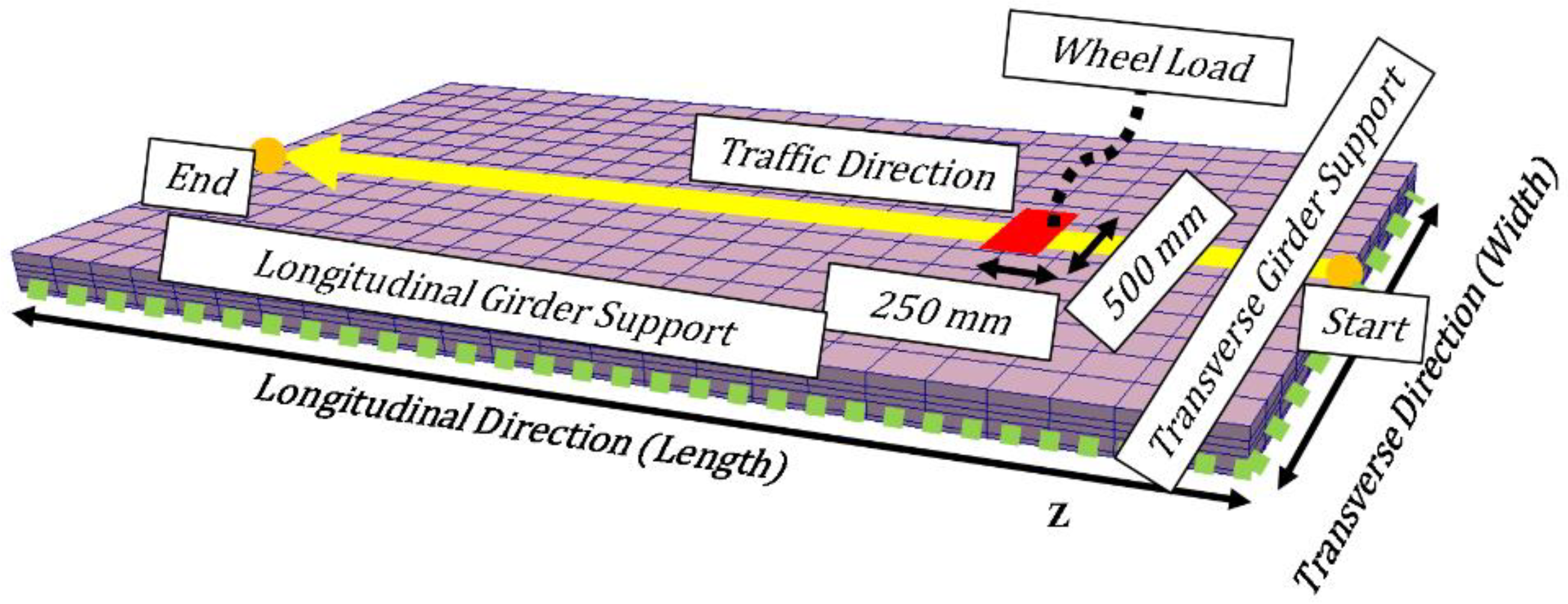
3.3. Loading Patterns
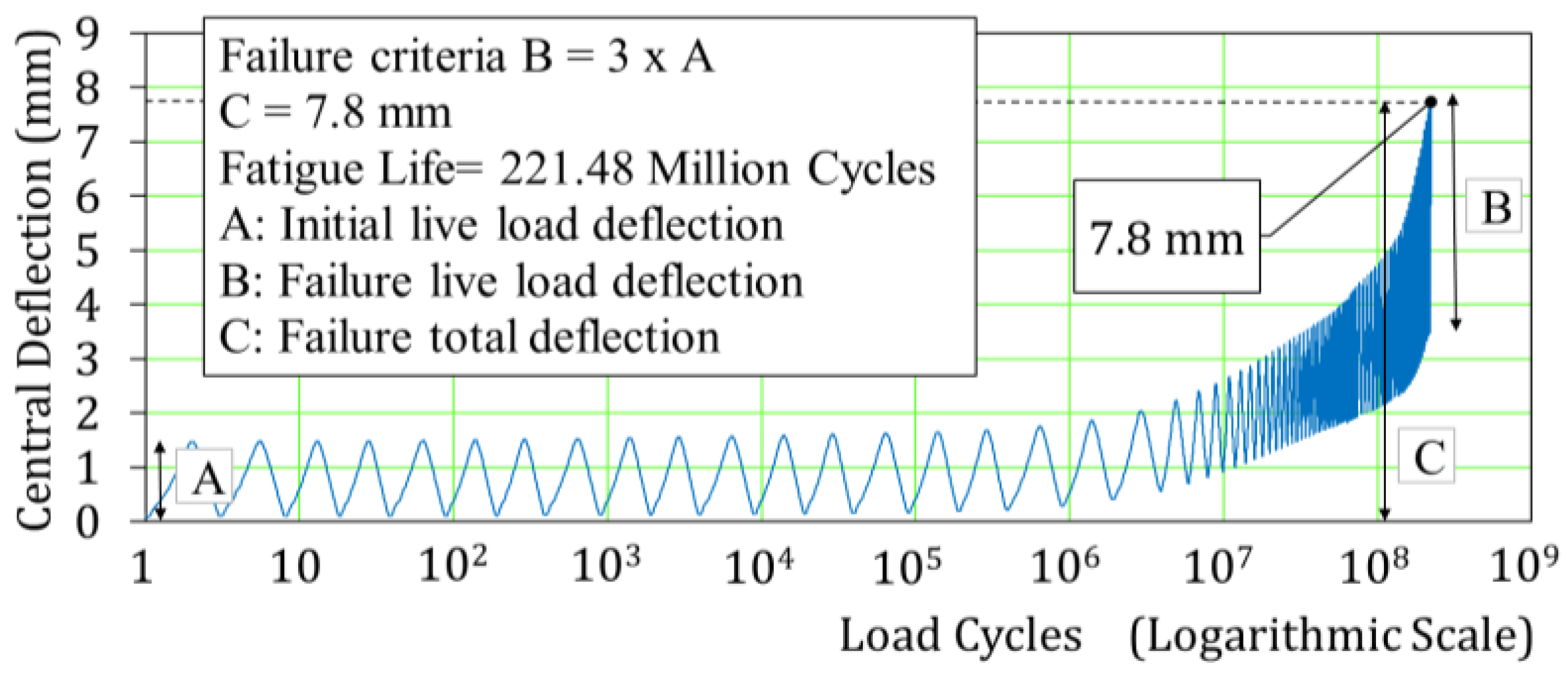
3.4. Limit State Failure Criteria
3.5. Standardized States for Numerical Model
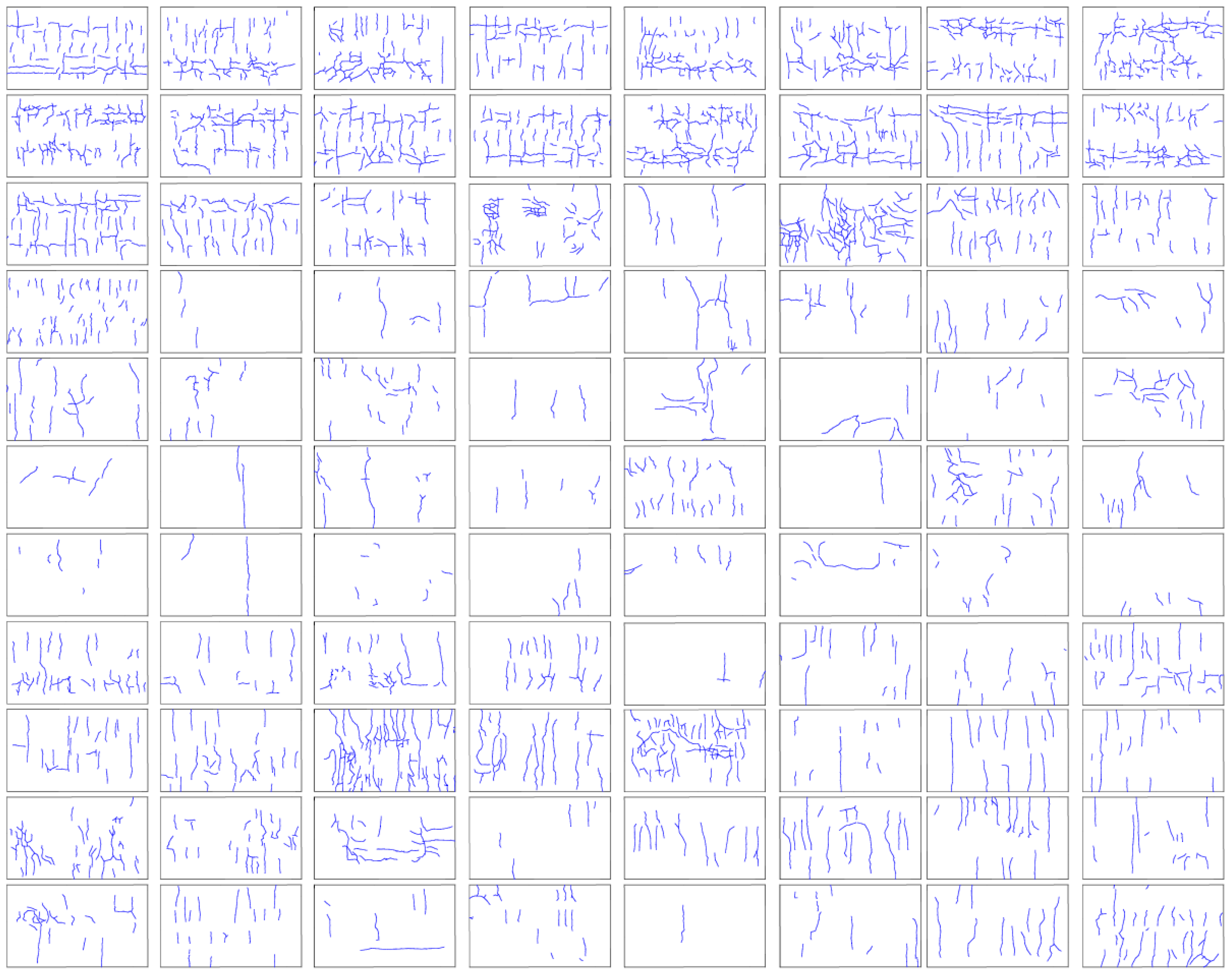
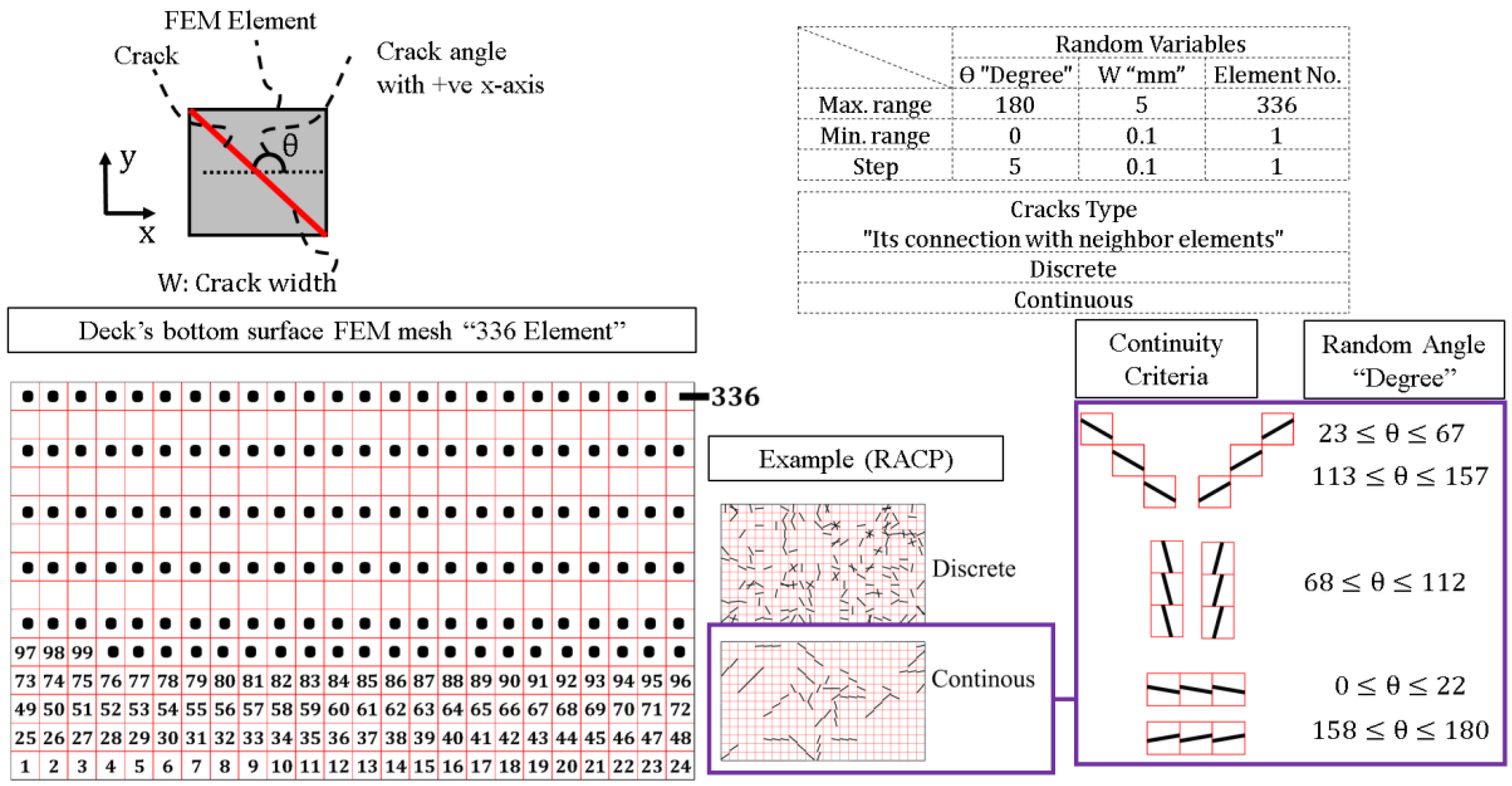
3.6. Crack Patterns Taken from Real Decks
4. Massive Life Simulation for ANN’s Learning
4.1. Referential RC Deck “No Damage”
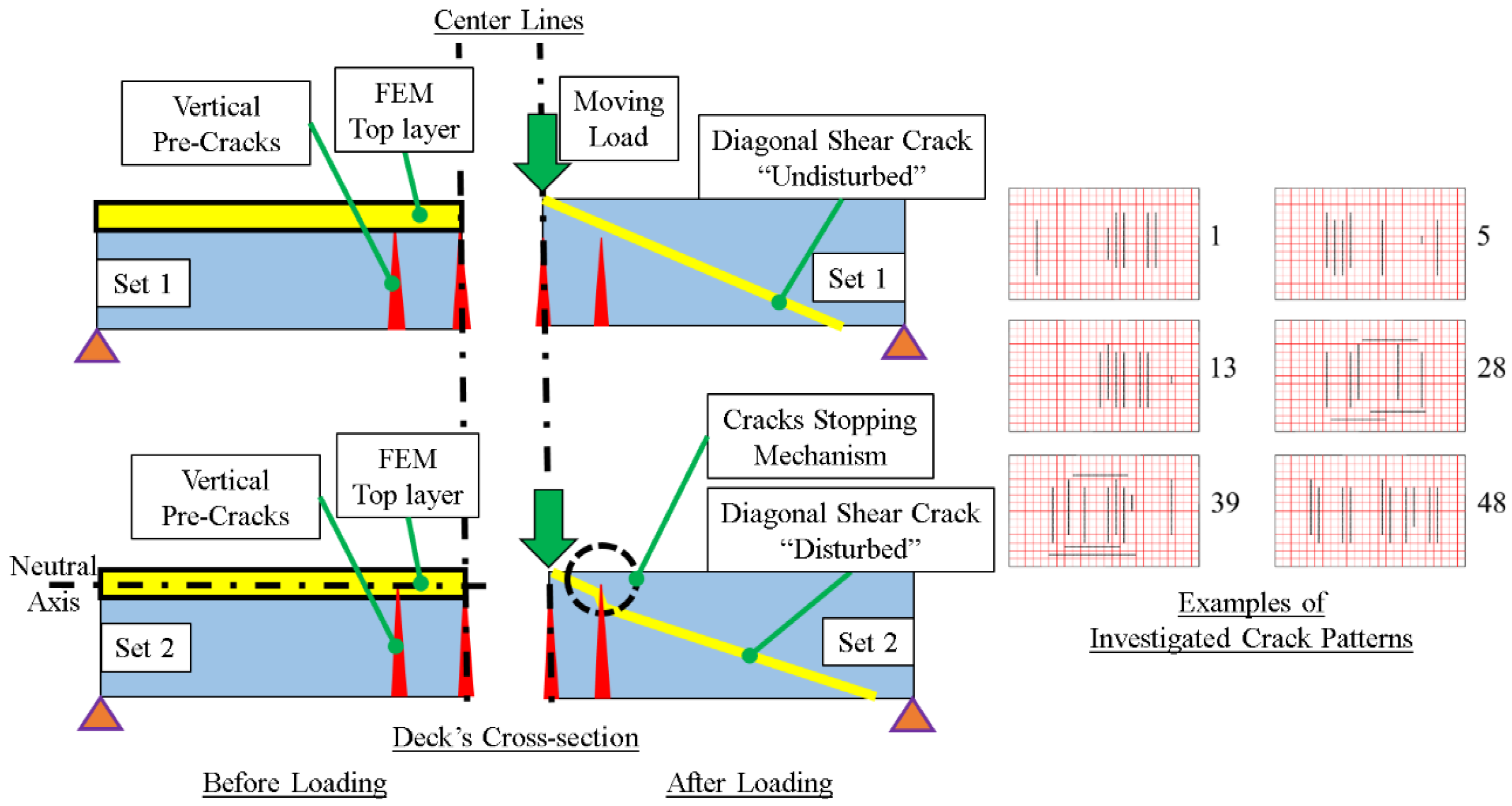
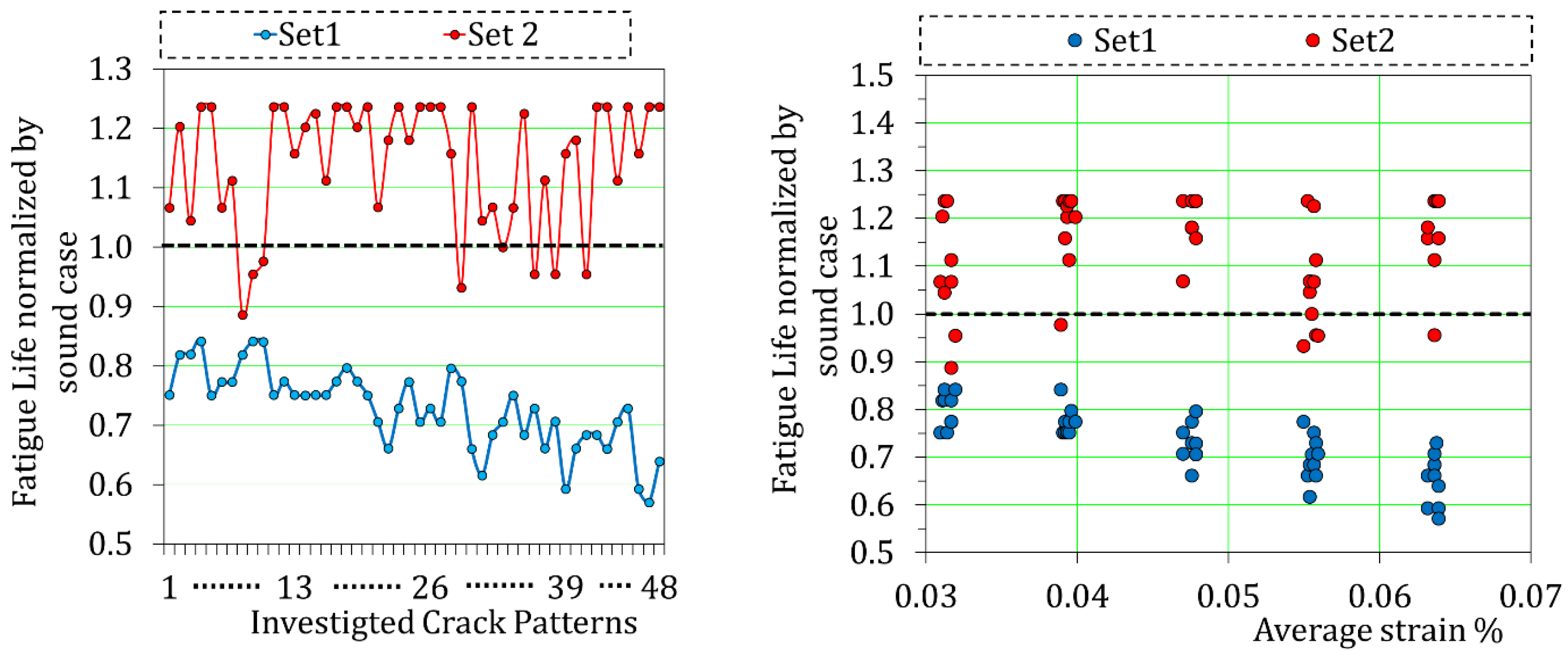
4.2. Sensitivity Analysis for Crack Depth
4.3. Cracked Cases
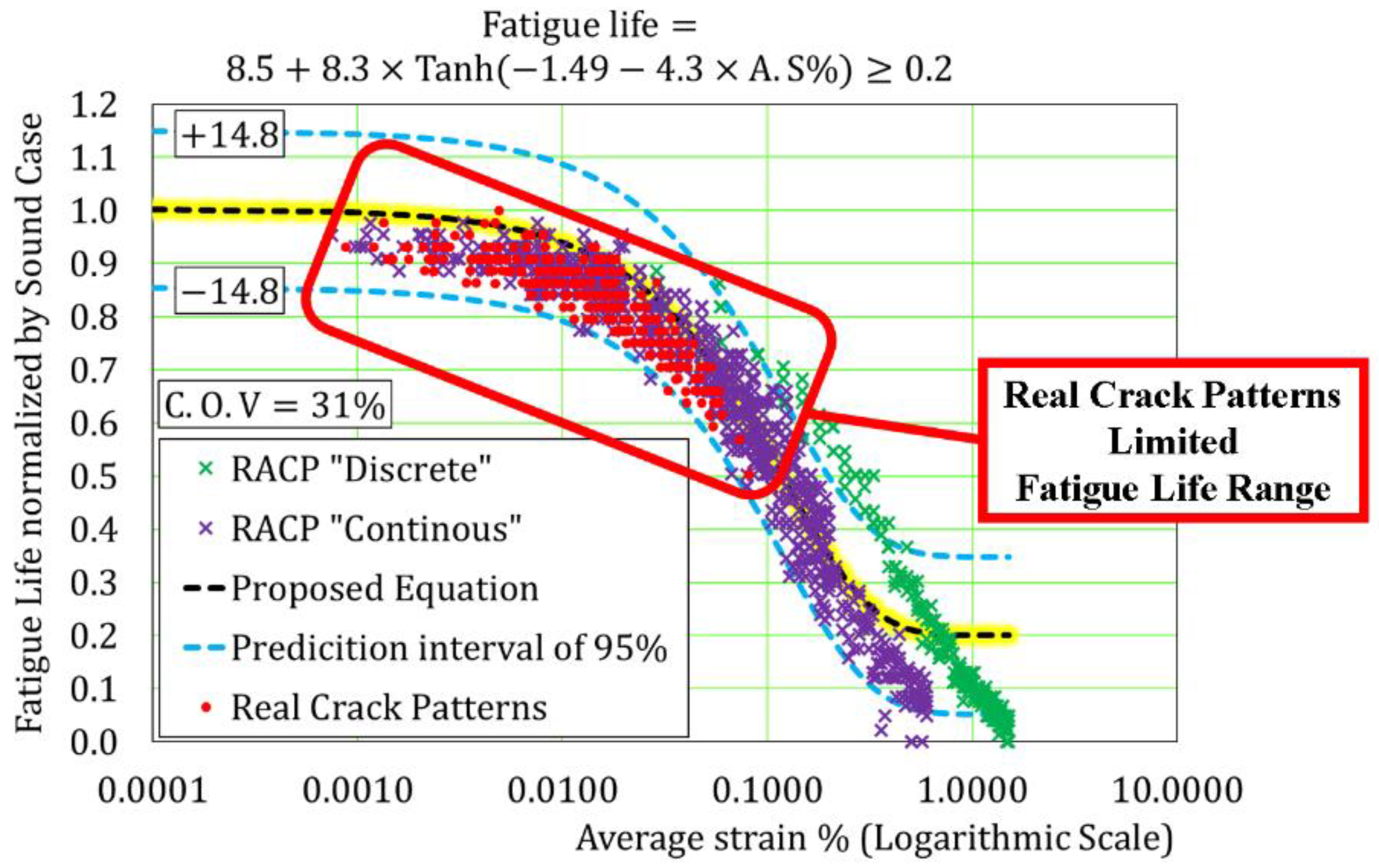
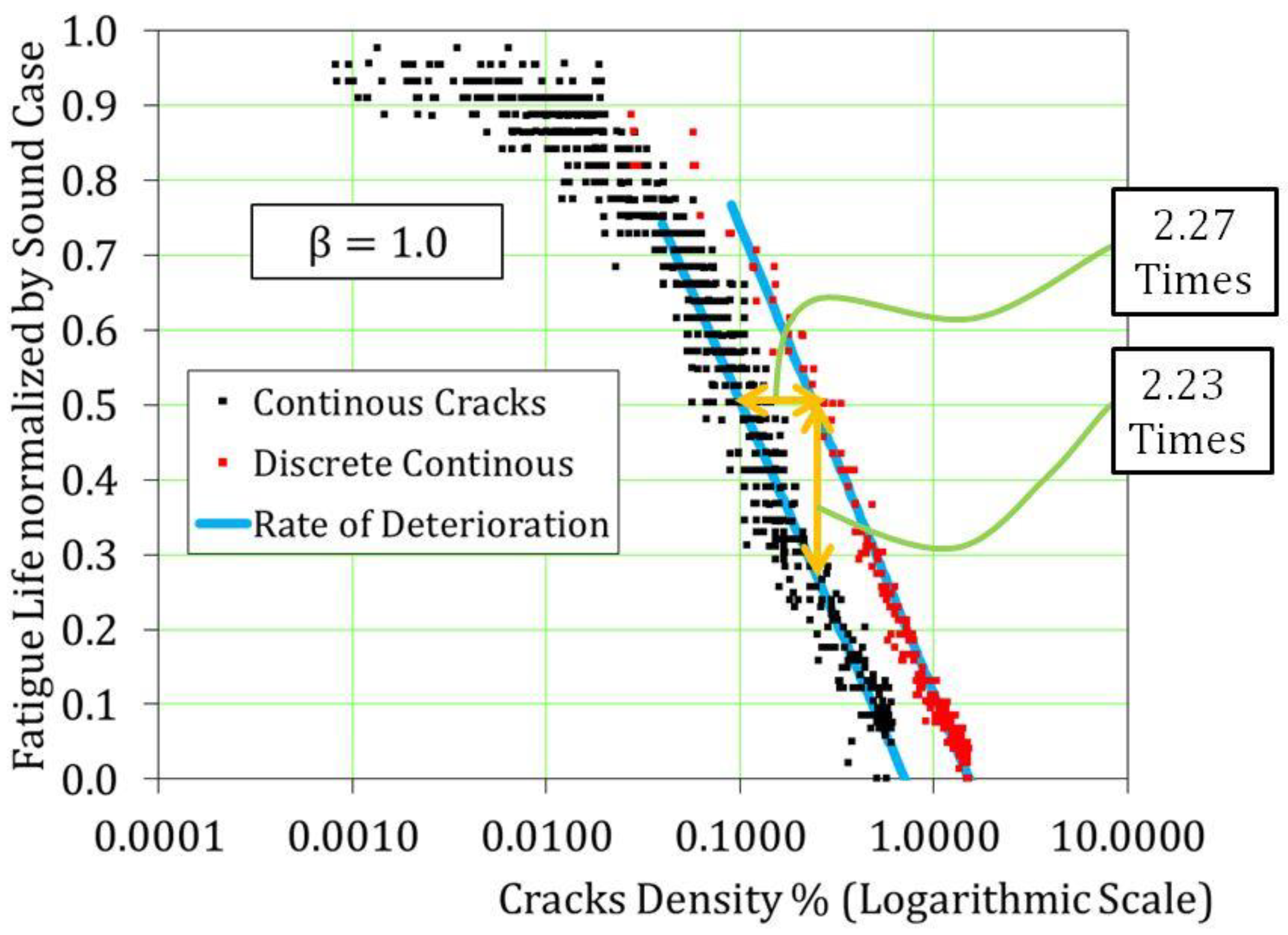
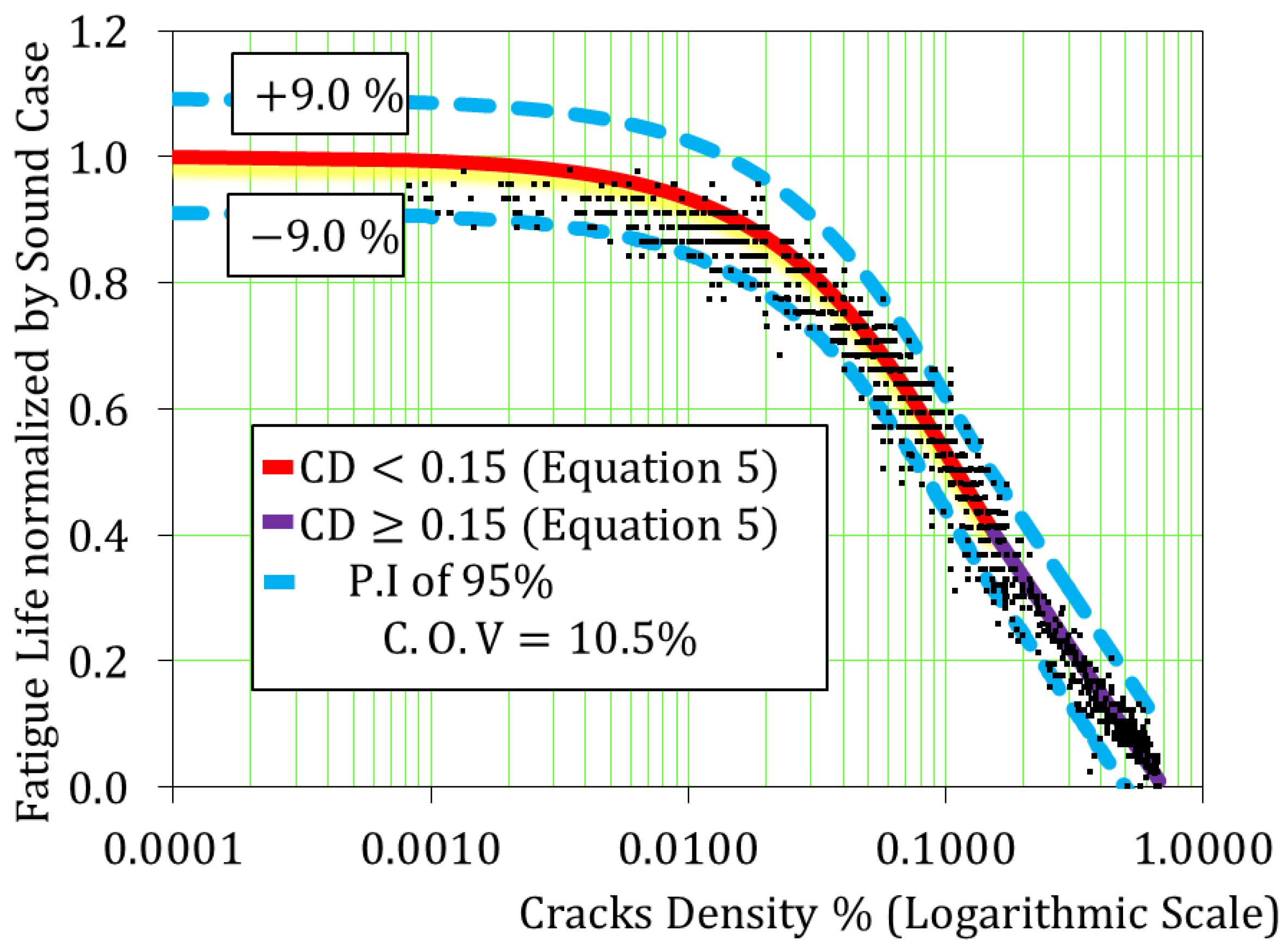
4.4. Statistical Correlation of Remaining Fatigue Life and Inspected Cracks
= − 0.266 × ln (CD) − 0.095 ≥ 0 → CD ≥ 0.15%
5. Training Artificial Neural Networks
5.1. Methodology for Fatigue Life Identification
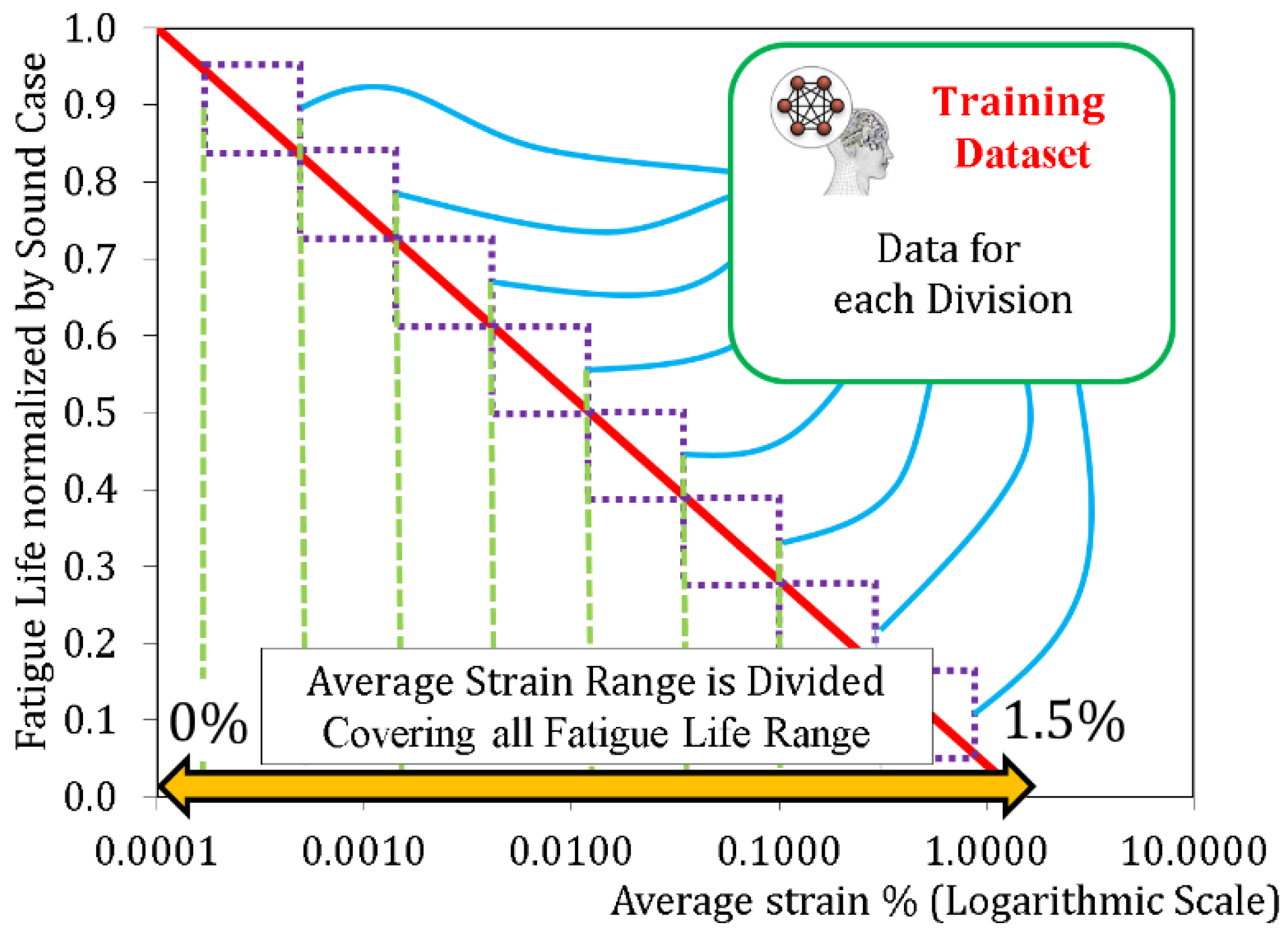
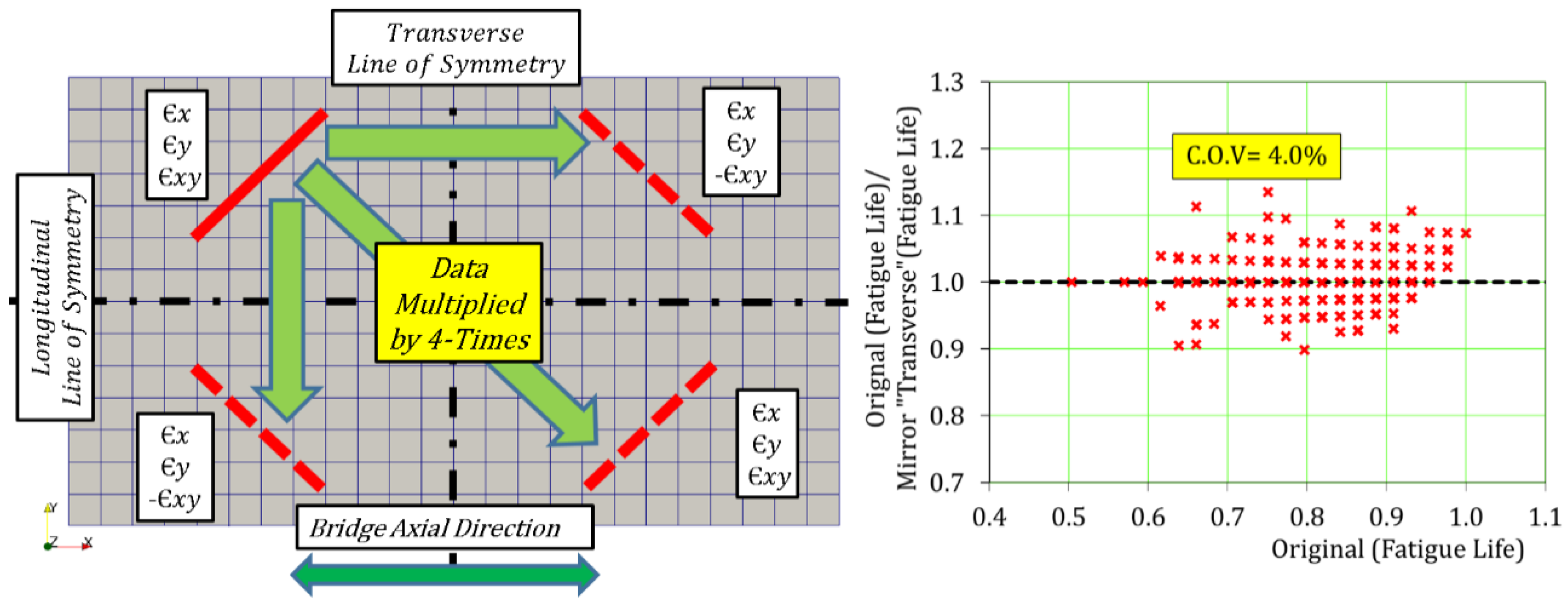
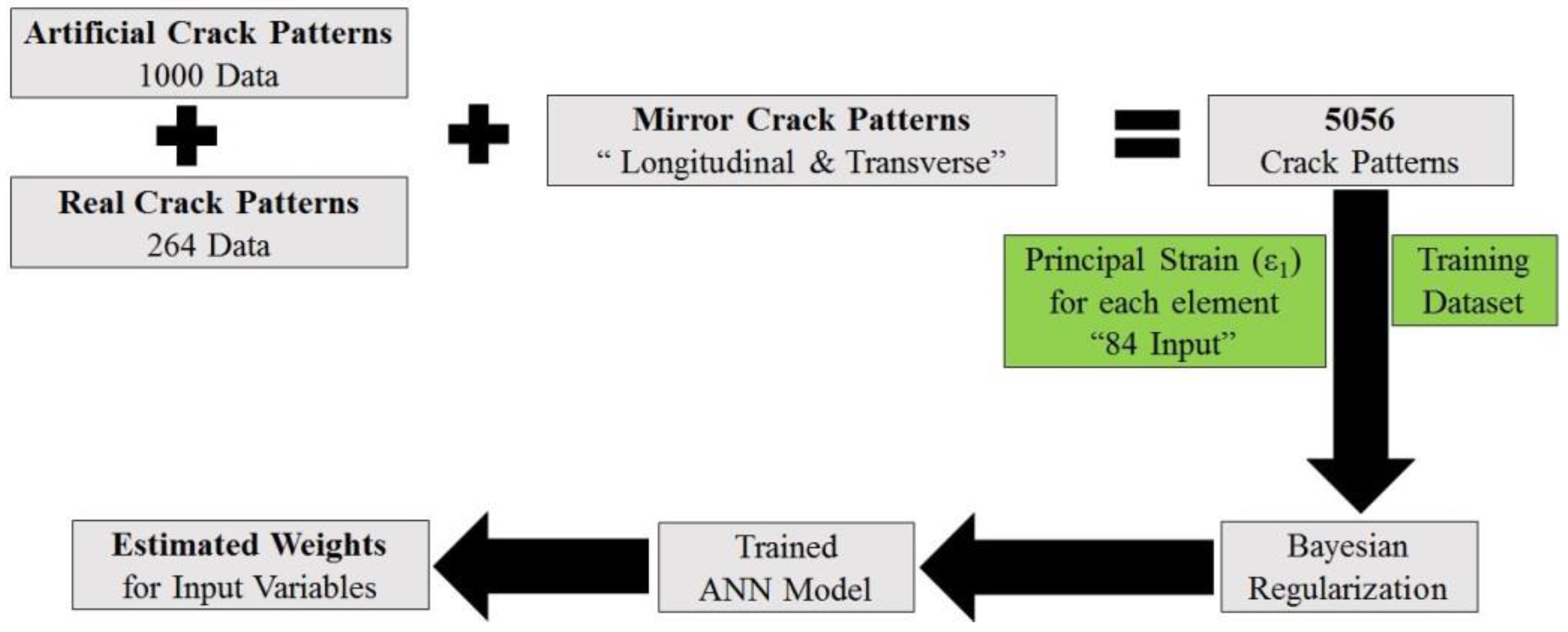
5.2. Requirements of Training Dataset
5.3. Neural Network Platform and Structure
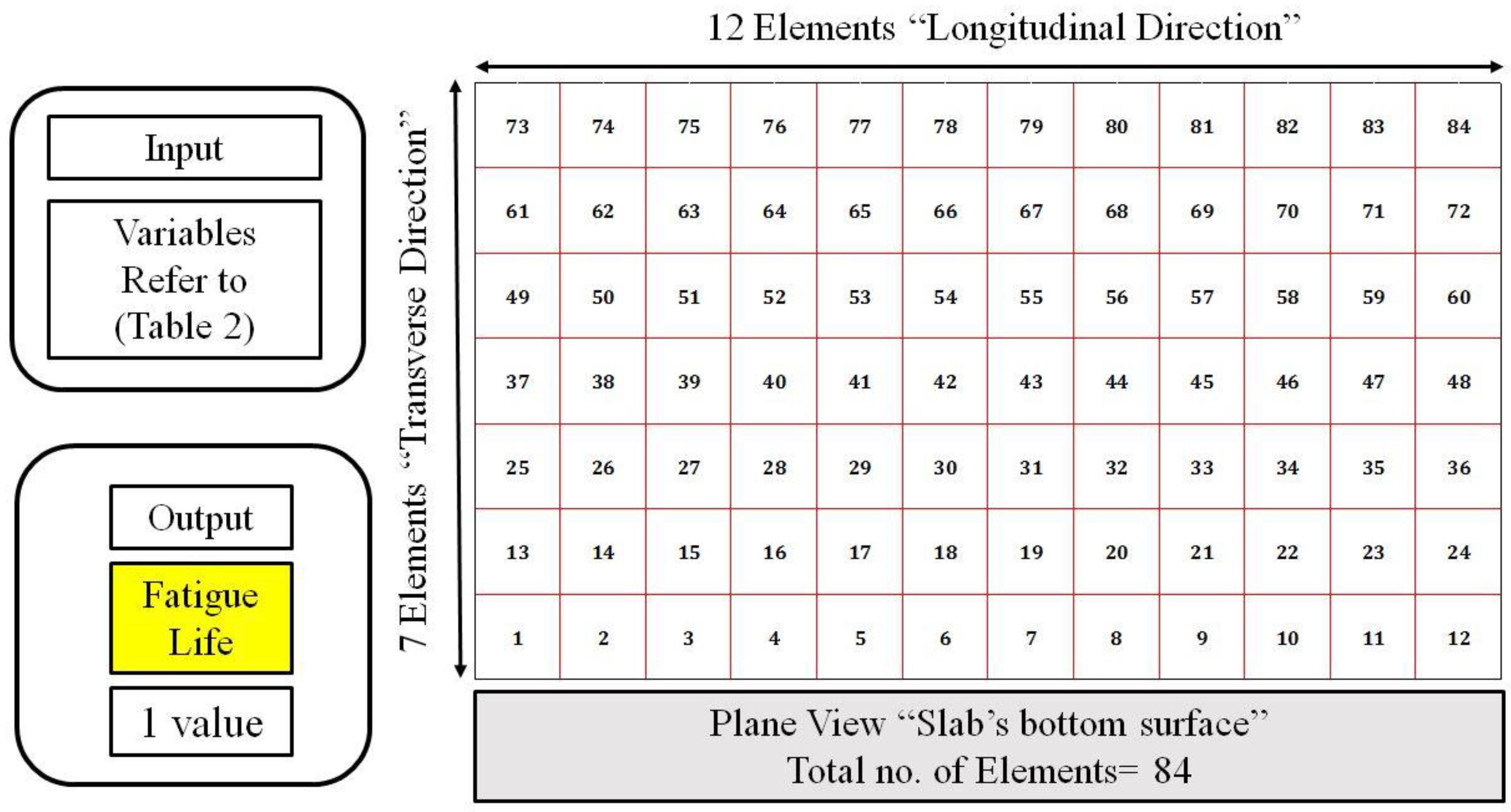
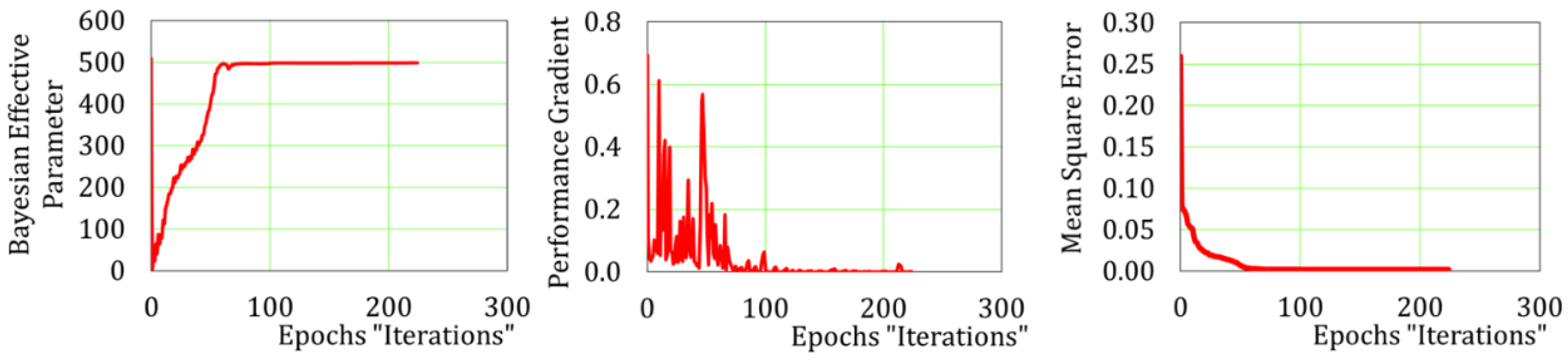
5.4. Built ANN’s Performance and Input Variables
5.5. Significance of Cracks Direction
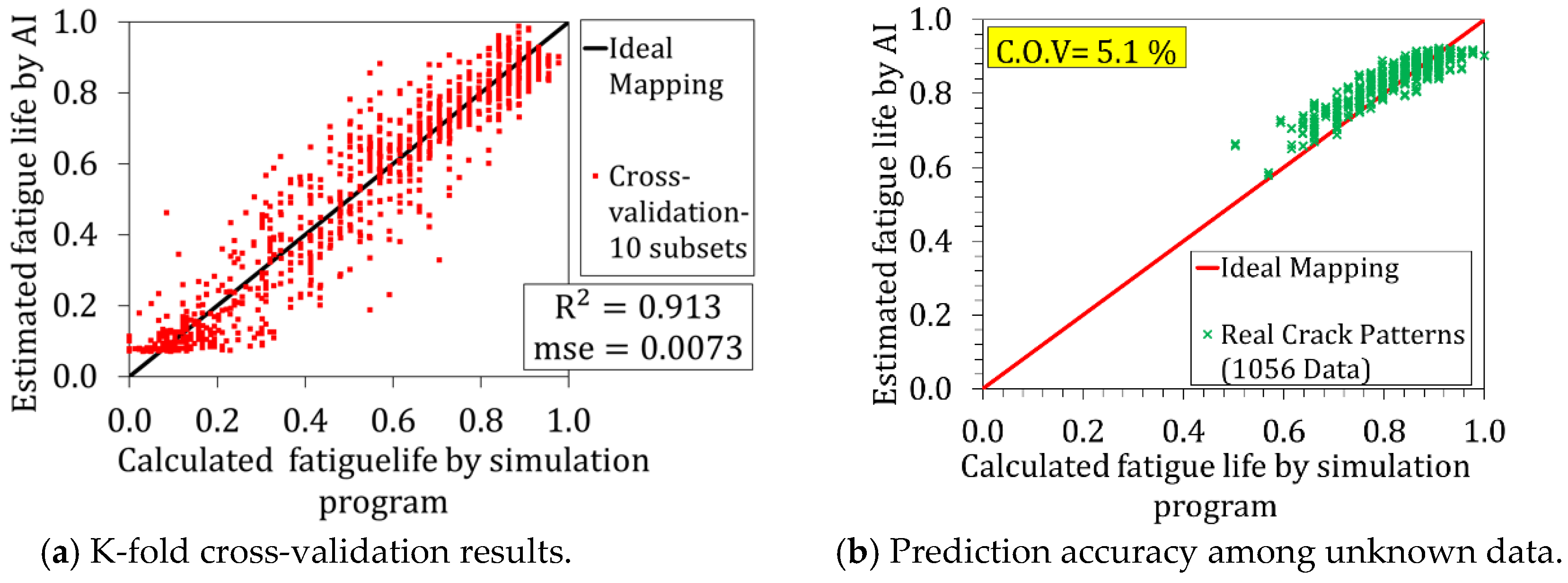
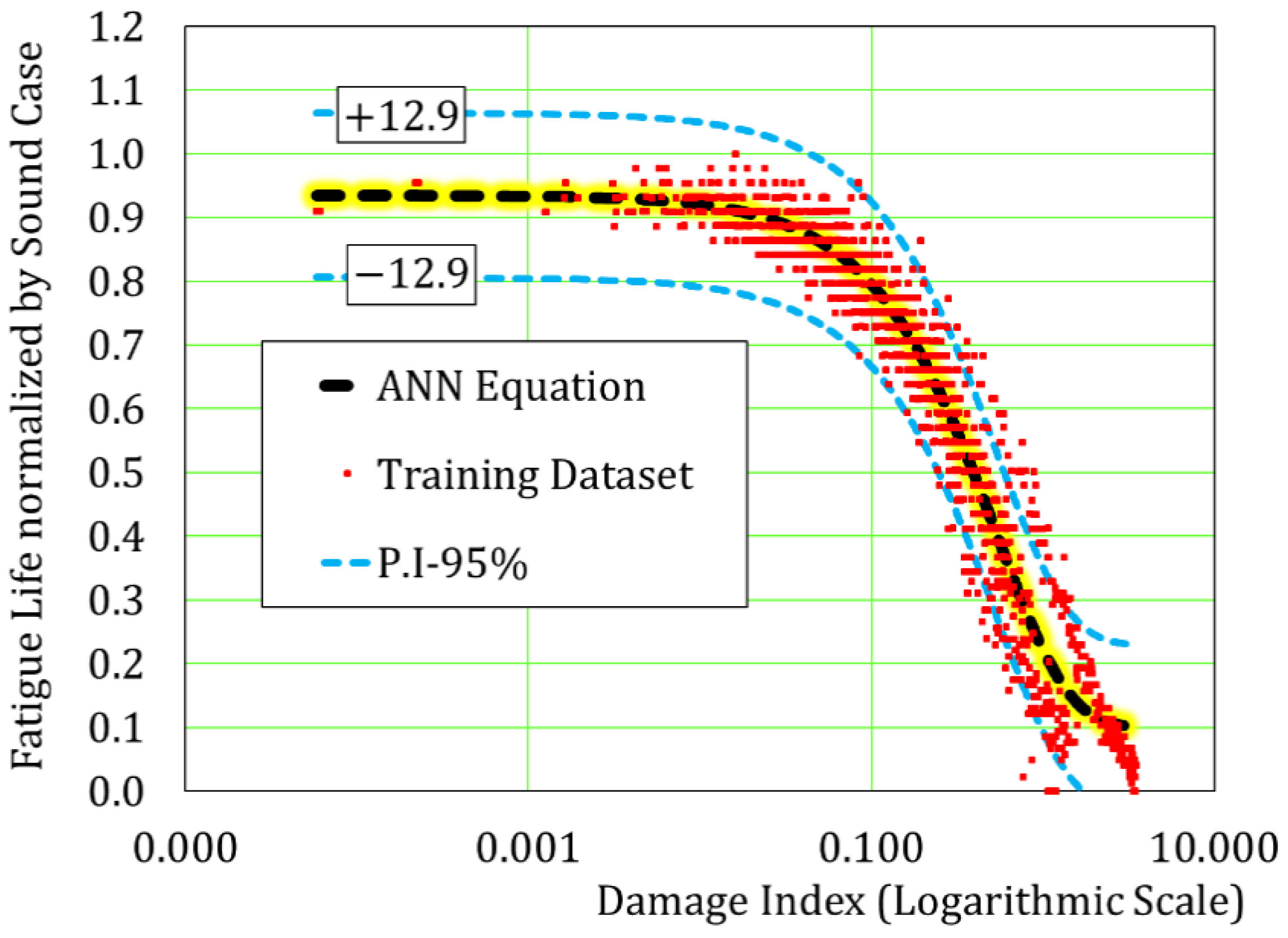
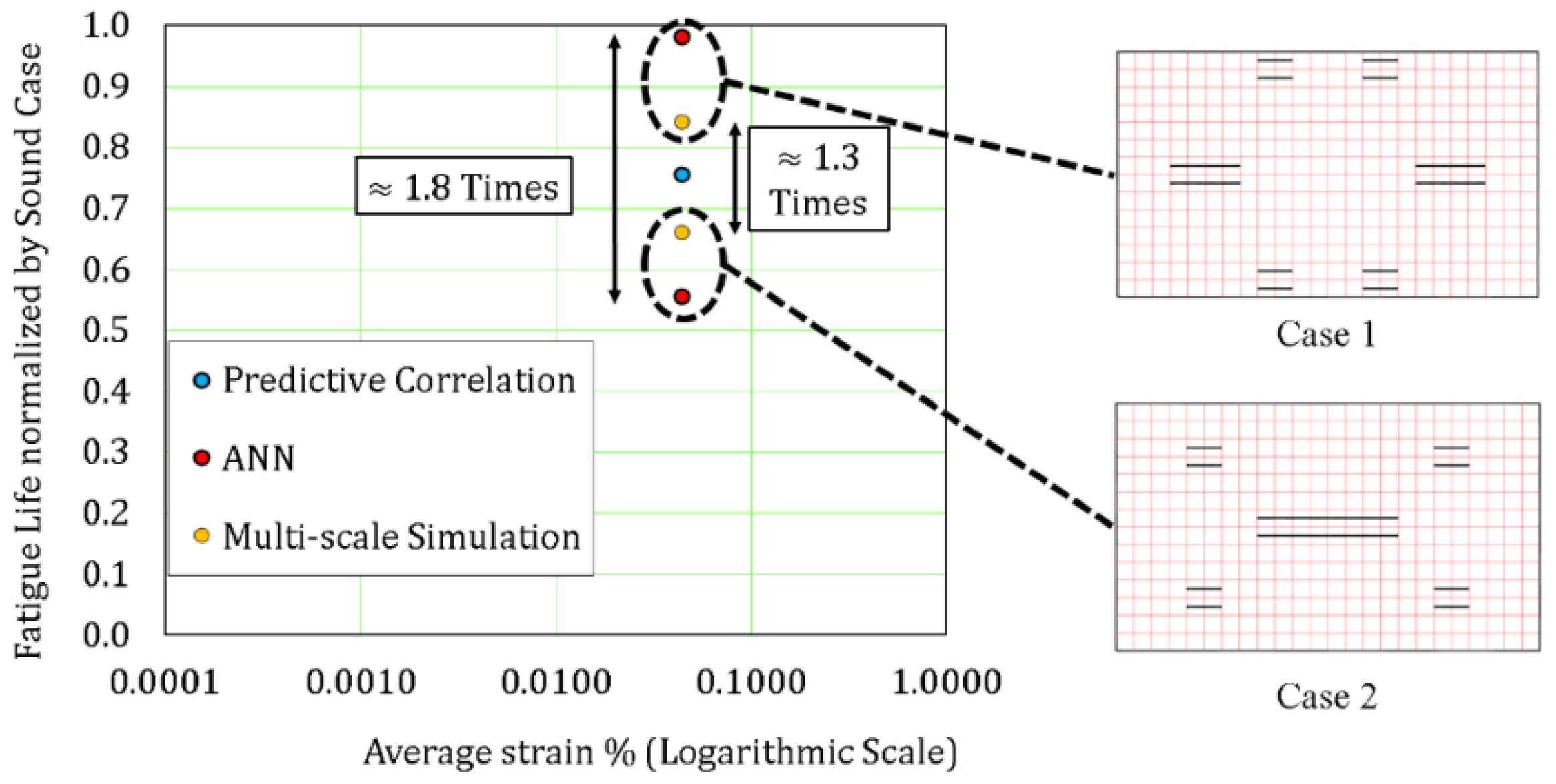
5.6. ANN Performance Evaluation
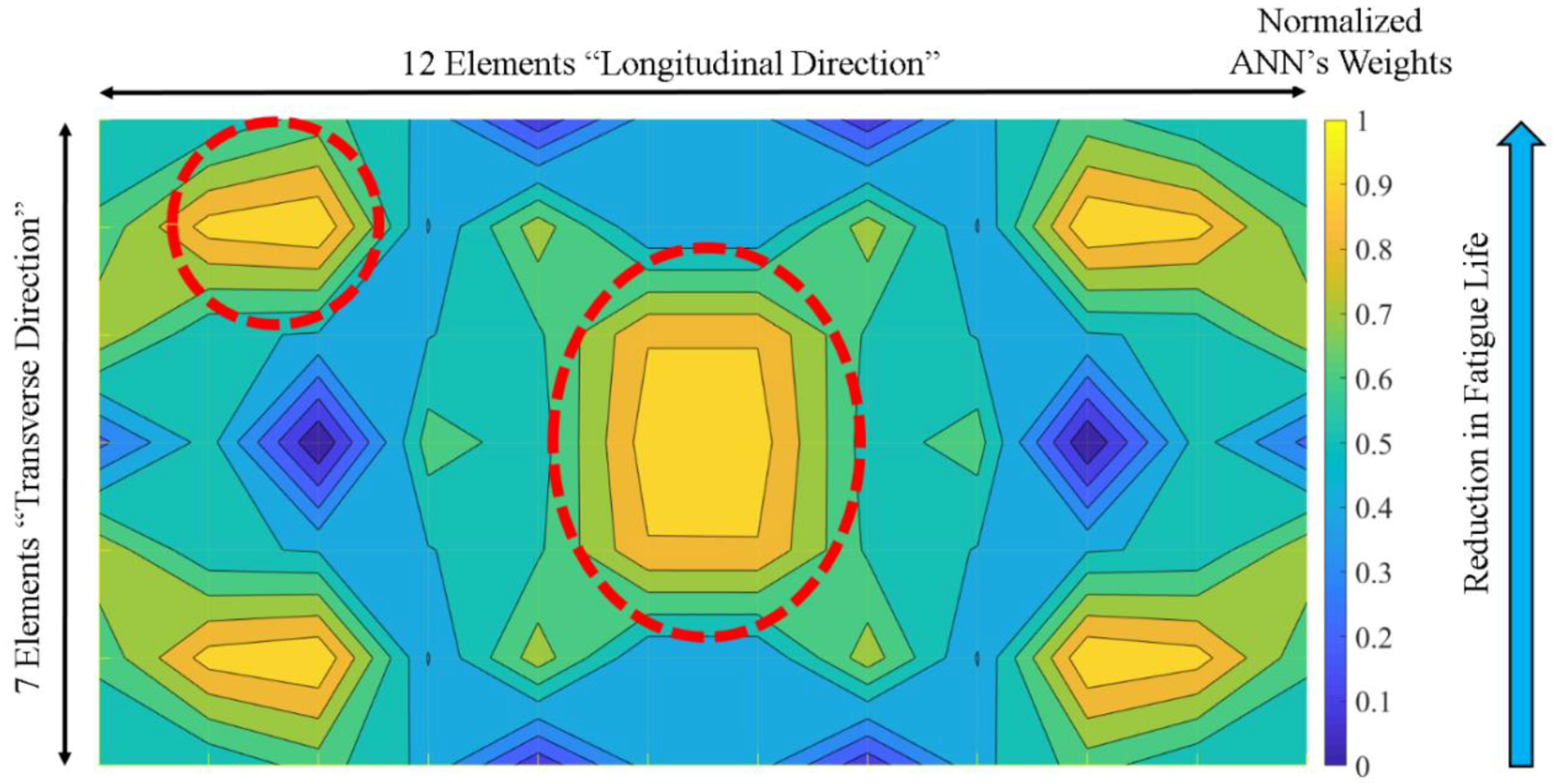
5.7. Structural Mechanistic Expressions of ANN’s Weights
6. Conclusions
- Two fast-truck quantitative assessment models for the magnitude of damages of in-situ RC bridge road decks in service were built based upon the training dataset created by numerical simulation as well as the real site inspection data. A quick and massive diagnosis, which is equivalent to the full 3D multi-scale simulation, is made possible.
- The statistical model is built on the basis of the mechanics-based parameter. Here, the conservative and safer-side assessment of the remaining fatigue life is practically made possible by avoiding the case where pre-cracking stops the preceding shear cracking.
- By examining the wide variety of crack orientation and their patterns over the bottom surfaces of RC decks, it is quantitatively proved that the geometrical patterns of cracking have much to do with the remaining fatigue life as well as crack width.
- By conduction k-fold cross-validation and testing the ANN model, the robustness and the generalization of the proposed ANN model are confirmed with the crack patterns observed at bridge construction site. Here, the numerically produced training dataset, which was offered by the multi-scale analysis, enables us to compensate the week spots of the training dataset.
- A hazard mapping to identify the high-risk location of cracking is created in use of the neuron’s weight and its sensitivity to the fatigue life. It is found that both RC deck’s central zone and their corners are the spots of caution. This map can be used as the guideline to train inspectors.
- It is proved that artificial intelligence is not just a tool for conducting predictive models but it can guide somehow to achieve physical expressions for a particular problem.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- NEXCO-Japan. Regarding Large-Scale Renewal and Large-Scale Repair on the Expressway Managed by Eastern, Central and West Japan Expressway Co., Ltd. 2014. Available online: https://www.c-nexco.co.jp/koushin/pdf/about.pdf (accessed on 17 May 2018).
- Japan Society of Civil Engineers. Standard Specifications for Concrete Structures—2017 “Maintenance”; JSCE Guidelines for Concrete; Japan Society of Civil Engineers: Tokyo, Japan, 2007. [Google Scholar]
- Maekawa, K.; Pimanmas, A.; Okamura, H. Nonlinear Mechanics of Reinforced Concrete; Spon Press: London, UK, 2003. [Google Scholar]
- Maekawa, K.; Ishida, T.; Kishi, T. Multi-Scale Modeling of Structural Concrete; Taylor & Francis: London, UK, 2009. [Google Scholar]
- Maekawa, K.; Toongoenthong, T.; Gebreyouhannes, E.; Kishi, T. Direct path-integral scheme for fatigue simulation of reinforced concrete in shear. J. Adv. Concr. Technol. 2006, 4, 159–177. [Google Scholar] [CrossRef]
- Fujiyama, C.; Tang, X.J.; Maekawa, K.; An, X. Pseudo-cracking approach to fatigue life assessment of RC bridge decks in service. J. Adv. Concr. Technol. 2013, 11, 7–21. [Google Scholar] [CrossRef]
- Tang, X.J.; Fujiyama, C.; An, X.H.; Maekawa, K. Pseudo cracking approach to fatigue life assessment of existing RC bridge decks based on crack inspection data. In Proceedings of the Thirteenth East Asia Pacific Conference on Structural Engineering and Construction (EASEC 13), Sapporo, Japan, 11–13 September 2013. [Google Scholar]
- Tanaka, Y.; Maekawa, K.; Maeshima, T.; Iwaki, I.; Nishida, T.; Shiotani, T. Data assimilation for fatigue life assessment of RC bridge decks coupled with hygro-mechanistic model and nondestructive inspection. J. Disaster Res. 2017, 12, 422–431. [Google Scholar] [CrossRef]
- Fathalla, E.; Tanaka, Y.; Maekawa, K. Parametrical study on fatigue life of road bridge decks with pseudo-cracking analysis. In Proceedings of the 8th Asia and Pacific Young Researchers and Graduates Symposium, Tokyo, Japan, 7–8 September 2017. [Google Scholar]
- Fathalla, E.; Tanaka, Y.; Maekawa, K. Remaining fatigue life assessment of in-service road bridge decks based upon artificial neural networks. Eng. Struct. 2018, 171, 602–616. [Google Scholar] [CrossRef]
- Fausett, L.V. Fundamentals of Neural Networks: Architectures, Algorithms, and Applications; Prentice-Hall: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]
- M.I.T. Lincoln Laboratory. DARPA Neural Network Study; Defense Technical Information Center: Fort Belvoir, VA, USA, 1989. [Google Scholar]
- Grossberg, S. Studies of the Mind and Brain; Reidel Press: Drodrecht, The Netherlands, 1982. [Google Scholar]
- Hagan, M.T.; Demuth, H.B.; Beale, M.H.; Jesús, O.D. Neural Network Design; PWS Publishing: Boston, MA, USA, 1996. [Google Scholar]
- Japan Road Association. Specification for Highway Bridges—Part III Concrete Bridges; Japan Road Association: Tokyo, Japan, 2012. [Google Scholar]
- Matsui, S. Lifetime prediction of bridge. J. JSCE 1996, 30, 432–440. [Google Scholar]
- Maeshima, T.; Koda, Y.; Tsuchiya, S.; Iwaki, I. Influence of corrosion of rebars caused by chloride induced deterioration on fatigue resistance in RC road deck. J. JSCE E2 2014, 70, 208–225. [Google Scholar] [CrossRef]
- Kado, M.; Maeshima, T.; Koda, Y.; Nakano, S.; Fujiyama, C.; Iwaki, I. Study on a method of evaluating fatigue damage for RC bridge deck slab using long basis optical strand sensors. J. JSCE E2 2015, 71, 323–337. [Google Scholar] [CrossRef]
- Okada, K.; Okamura, H.; Sonoda, K.; Shimada, I. Cracking and fatigue behavior of bridge deck RC slabs. J. JSCE 1982, 321, 49–61. [Google Scholar] [CrossRef]
- Mizutani, T.; Nakamura, N.; Yamaguchi, T.; Tarumi, M.; Ando, Y. Signal processing for fast RC bridge slab damage detection by using UHF-band radar. In Proceedings of the 6th Asia Pacific Workshop on Structural Health Monitoring, Hobart, Australia, 7–9 December 2017. [Google Scholar]
- Kobayashi, Y.; Oda, K.; Shiotani, T. Three dimensional AE tomography with accurate source location technique. In Proceedings of the Structural Faults & Repair, London, UK, 8–10 July 2014. [Google Scholar]
- Nair, A.; Cai, C.S. Acoustic emission monitoring of bridges: Review and case studies. Eng. Struct. 2010, 32, 1704–1714. [Google Scholar] [CrossRef]
- Takeuchi, H.; Ozawa, I.; Yano, R.; Mitsuya, Y.; Dobashi, K.; Uesaka, M.; Tanaka, Y.; Takahashi, Y.; Kusano, J.; Yoshida, E.; et al. Quantification of transmission X-ray imaging capability of portable X-ray source in concrete bridge inspection. J. JSCE E2 2018, 74, 66–79. [Google Scholar] [CrossRef]
- Ikeda, Y.; Takamura, M.; Taketani, A.; Sunaga, H.; Otake, Y.; Suzuki, H.; Kumagai, M.; Oba, Y. Prospect for application of compact accelerator-based neutron source to neutron engineering diffraction. Nucl. Instrum. Methods Phys. Res. Sect. A 2016, 833, 61–67. [Google Scholar] [CrossRef]
- Tanaka, Y.; Kishi, T.; Maekawa, K. Experimental research on the structural mechanism of RC members containing artificial crack in shear. JSCE 2005, 802, 109–121. [Google Scholar] [CrossRef]
- Tanaka, Y.; Kishi, T.; Maekawa, K. Tied arch system and evaluation method of shear strength of RC members containing artificial crack or unbond zone. JSCE 2005, 788, 175–193. [Google Scholar]
- Niwa, J.; Yamada, K.; Yokozawa, K.; Okamura, H. Revaluation of the equation for shear strength of reinforced concrete beams without web reinforcement. J. JSCE 1986, 372, 65–84. [Google Scholar] [CrossRef]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; The MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Hagan, M.T.; Menhaj, M. Training feed-forward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 15, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Rumelhart, D.; Hinton, G.; Williams, R. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Burden, F.; Winkler, D. Bayesian Regularization of Neural Networks, in Artificial Neural Networks. Methods Mol. Biol. 2008, 458, 25–44. [Google Scholar] [PubMed]
- Foresee, F.D.; Hagan, M.T. Gauss-Newton approximation to Bayesian regularization. In Proceedings of the International Joint Conference on Neural Networks, Nagoya, Japan, 23–29 August 1997. [Google Scholar]
- MacKay, D.J.C. Bayesian Interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Geisser, S. Predictive Inference; Chapman and Hall: New York, NY, USA, 1993. [Google Scholar]
- Picard, R.R.; Cook, R.D. Cross-Validation of Regression Models. J. Am. Stat. Assoc. 1984, 79, 575–583. [Google Scholar] [CrossRef]
- Maekawa, K.; Zhu, X.; Chijiwa, N.; Tanabe, S. Mechanism of long-term excessive deformation and delayed shear failure of underground RC box culverts. J. Adv. Concr. Technol. 2016, 14, 183–204. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Type | Concrete | Steel Reinforcement | |
|---|---|---|---|
| Young’s Modulus | N/mm2 | 24,750 | 205,000 |
| Compressive Strength | N/mm2 | 30 | 295 |
| Tensile Strength | N/mm2 | 2.2 | 295 |
| Specific Weight | kN/m3 | 24 | 78 |
| ANN Input Variables | Variables for Each FEM Element | No. of Elements | Total Number of Variables | Cracks Direction |
|---|---|---|---|---|
| Case (1) | εxx, εyy, εxy | 336 | 1008 | Included “Indirectly” |
| Case (2) | ε1, θ (Equations (6) and (7)) | 336 | 672 | Included “Directly” |
| Case (3) | εxx, εyy, εxy | 84 | 252 | Included “Indirectly” |
| Case (4) | ε1, θ (Equations (6) and (7)) | 84 | 168 | Included “Directly” |
| ANN Input Variables | Number of Hidden Layers | Number of Neurons |
|---|---|---|
| Case 1 | 1 | 1 |
| Case 2 | 1 | 1 |
| Case 3 | 1 | 2 |
| Case 4 | 1 | 2 |
| Case 5 Section 5.5 | 1 | 2 |
| ANN Input Variables | Variables for Each FEM Element | No. of Elements | Total Number of Variables | Cracks Direction |
|---|---|---|---|---|
| Case (3) | εxx, εyy, εxy | 84 | 252 | Included “Indirectly” |
| Case (5) | ε1 | 84 | 84 | Not included |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fathalla, E.; Tanaka, Y.; Maekawa, K.; Sakurai, A. Quantitative Deterioration Assessment of Road Bridge Decks Based on Site Inspected Cracks. Appl. Sci. 2018, 8, 1197. https://doi.org/10.3390/app8071197
Fathalla E, Tanaka Y, Maekawa K, Sakurai A. Quantitative Deterioration Assessment of Road Bridge Decks Based on Site Inspected Cracks. Applied Sciences. 2018; 8(7):1197. https://doi.org/10.3390/app8071197
Chicago/Turabian StyleFathalla, Eissa, Yasushi Tanaka, Koichi Maekawa, and Akito Sakurai. 2018. "Quantitative Deterioration Assessment of Road Bridge Decks Based on Site Inspected Cracks" Applied Sciences 8, no. 7: 1197. https://doi.org/10.3390/app8071197
APA StyleFathalla, E., Tanaka, Y., Maekawa, K., & Sakurai, A. (2018). Quantitative Deterioration Assessment of Road Bridge Decks Based on Site Inspected Cracks. Applied Sciences, 8(7), 1197. https://doi.org/10.3390/app8071197