A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot

Abstract
:1. Introduction
2. Driving Requirements and Strategies of Piezoelectric Actuator
2.1. Equivalent Model of a Piezoelectric Actuator
2.2. Drive Requirements
2.3. Driving Methods
3. Design and Control of the Drive Circuit
3.1. DC/DC Voltage Conversion Stage
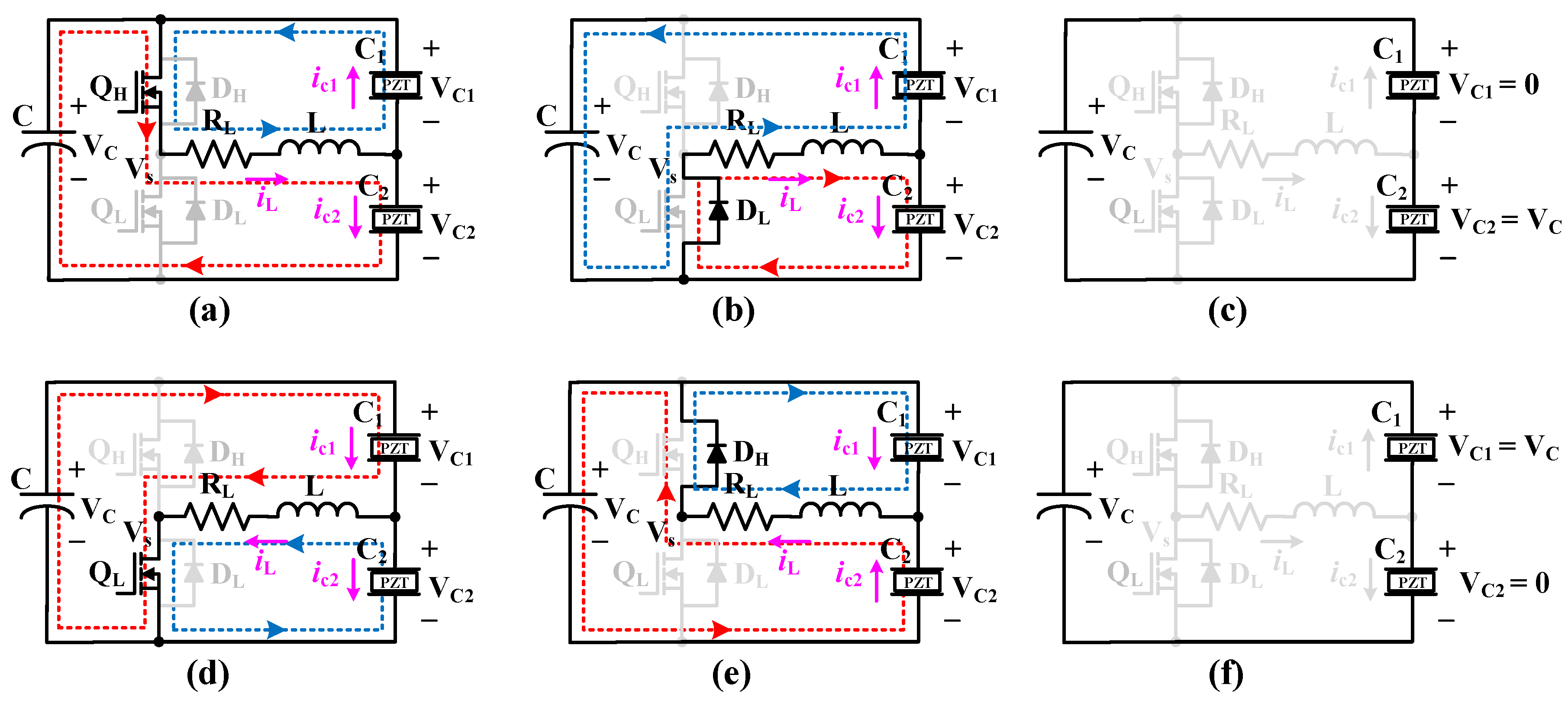
3.2. DC/AC High-Voltage Drive Stage
3.3. Control Method of the Drive Stage
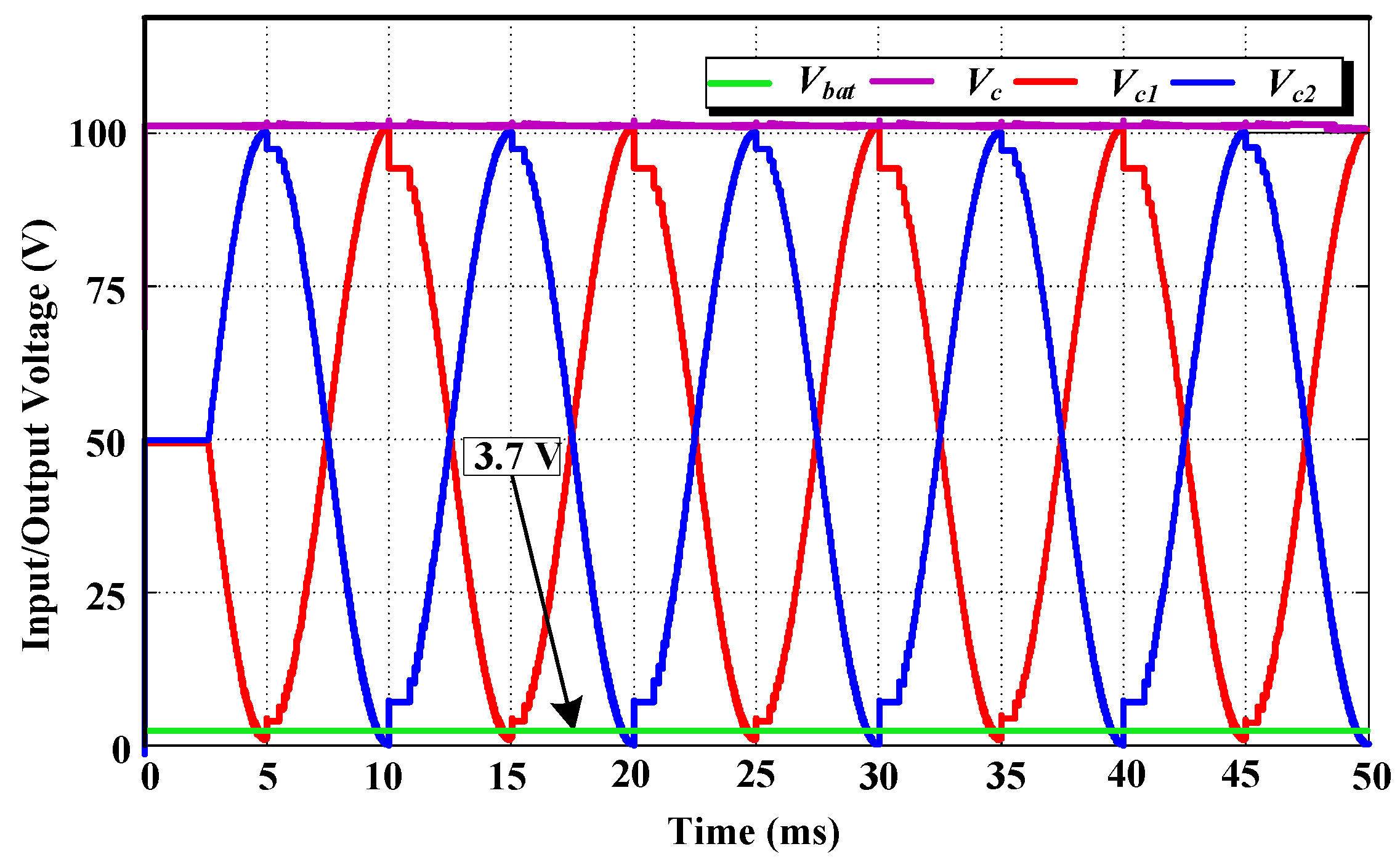
4. Simulation Verification
5. Experiment Realization
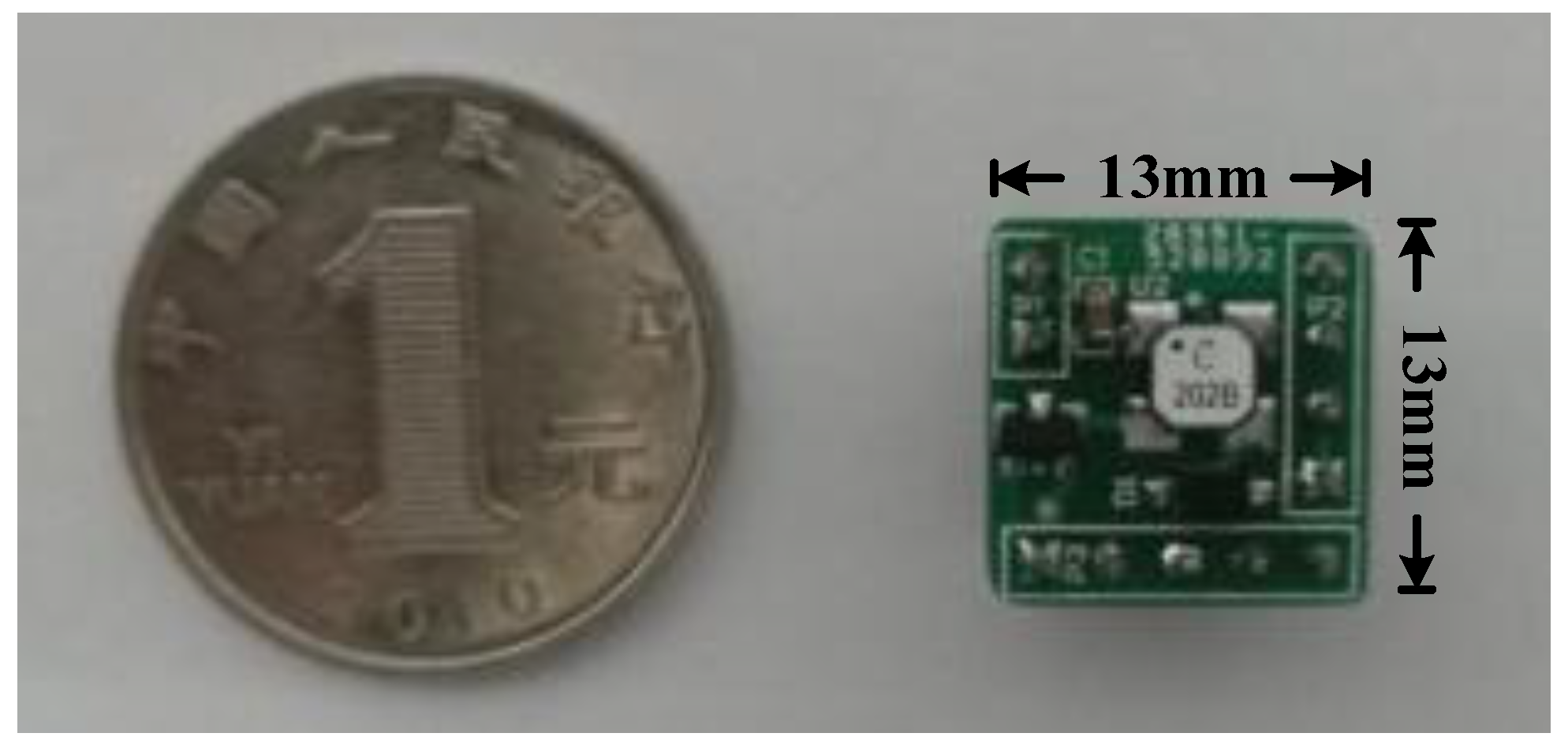
5.1. Fabrication Specifications
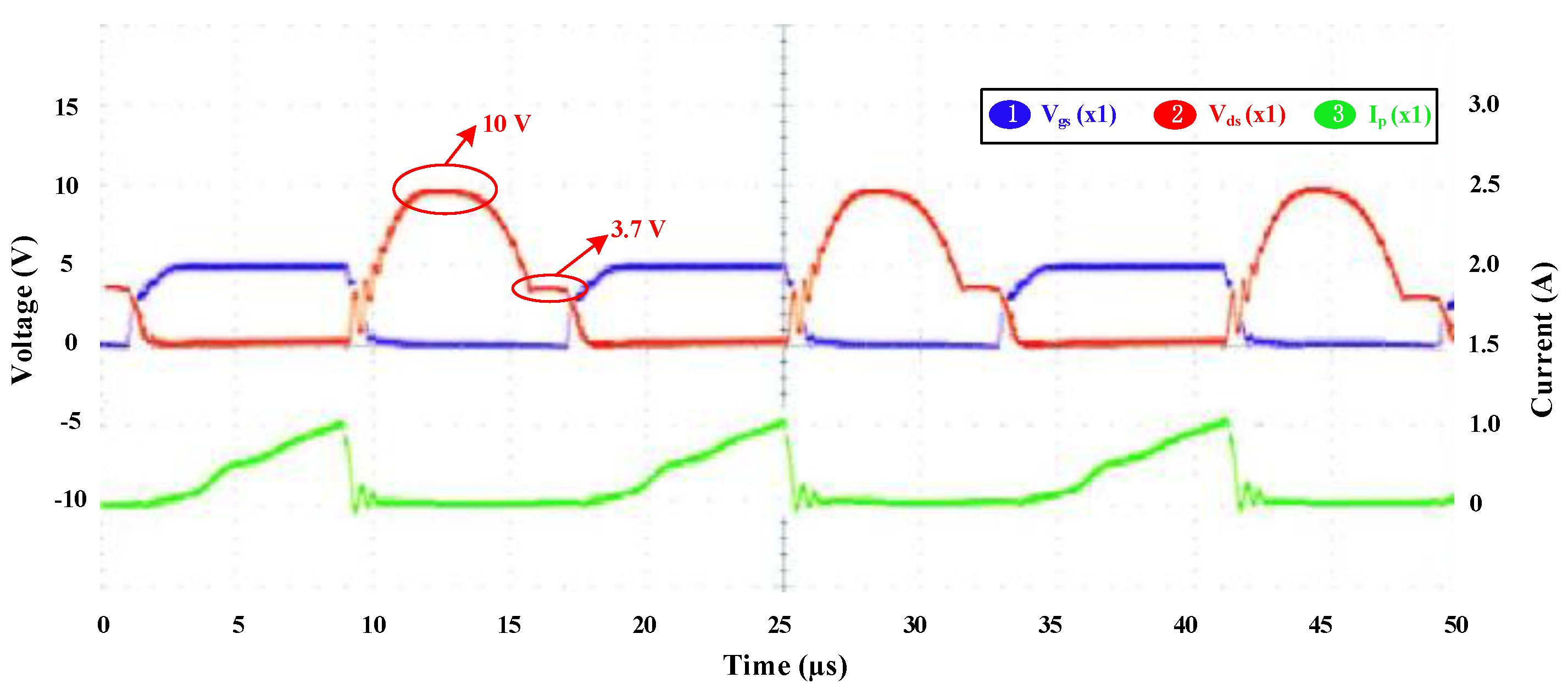
5.2. Circuit Experimental Analyses
5.3. Performance Optimization
5.4. PZT Driving Validation
6. Conclusion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ceylan, H.; Giltinan, J.; Kozielski, K.; Sitti, M. Mobile microrobots for bioengineering applications. Lab Chip 2017, 17, 1705. [Google Scholar] [CrossRef] [PubMed]
- Gregory, J.; Fink, J.; Stump, E.; Twigg, J.; Rogers, J.; Baran, D.; Fung, N.; Young, S. Application of Multi-Robot Systems to Disaster-Relief Scenarios with Limited Communication. In Field and Service Robotics; David, W., Timothy, D.B., Eds.; Springer International Publishing: New York, NY, USA, 2016; pp. 639–653, 1610–7438. [Google Scholar]
- Cai, H.M.; Ang, H.S.; Zhang, H.L.; Duan, W.B. Experiment on aerodynamic characteristics of a novel micro tilt ducted fan aircraft with wings. Acta Autom. Sin. 2012, 30, 777–781. [Google Scholar]
- Rios, S.A.; Fleming, A.J.; Yong, Y.K. Design of a two degree of freedom resonant miniature robotic leg. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics, Busan, Korea, 7–11 July 2015; pp. 318–323. [Google Scholar]
- Tang, Y.; Chen, C.; Khaligh, A.; Penskiy, I.; Bergbreiter, S. An ultracompact dual-stage converter for driving electrostatic actuators in mobile microrobots. IEEE Trans. Power Electron. 2014, 29, 2991–3000. [Google Scholar] [CrossRef]
- Suzumori, K.; Endo, S.; Kanda, T.; Kato, N.; Suzuki, H. A Bending Pneumatic Rubber Actuator Realizing Soft-bodied Manta Swimming Robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 21 May 2007; pp. 4975–4980. [Google Scholar]
- Lv, X.; Wei, W.; Mao, X.; Chen, Y.; Yang, J.; Yang, F. A novel MEMS electromagnetic actuator with large displacement. Sens. Actuators A 2015, 221, 22–28. [Google Scholar] [CrossRef] [Green Version]
- Mineta, T.; Mitsui, T.; Watanabe, Y.; Kobayashi, S.; Haga, Y.; Esashi, M. An active guide wire with shape memory alloy bending actuator fabricated by room temperature process. Sens. Actuators A 2002, 97–98, 632–637. [Google Scholar] [CrossRef]
- Towfighian, S.; Seleim, A.; Abdel-Rahman, E.M.; Heppler, G.R. A large-stroke electrostatic micro-actuator. J. Micromech. Microeng. 2011, 21, 075023. [Google Scholar] [CrossRef] [Green Version]
- Kovacs, G.; Düring, L.; Michel, S.; Terrasi, G. Stacked dielectric elastomer actuator for tensile force transmission. Sens. Actuators A 2009, 155, 299–307. [Google Scholar] [CrossRef]
- Wood, R.J.; Avadhanula, S.; Sahai, R.; Steltz, E.; Fearing, R.S. Micro robot Design Using Fiber Reinforced Composites. J. Mech. Des. 2008, 130, 680–682. [Google Scholar] [CrossRef]
- Karpelson, M.; Wei, G.Y.; Wood, R.J. Driving high voltage piezoelectric actuators in microrobotic applications. Sens. Actuators A 2012, 176, 78–89. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; Parslew, B.; Crowther, W.J. Dynamic performance of unimorph piezoelectric bending actuators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 118–129. [Google Scholar] [CrossRef]
- Nabawy, M.R.A.; Crowther, W.J. Dynamic electromechanical coupling of piezoelectric bending actuators. Micromachines 2016, 7, 12. [Google Scholar] [CrossRef]
- Steltz, E.; Seeman, M.; Avadhanula, S.; Fearing, R.S. Power electronics design choice for piezoelectric micro robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1322–1328. [Google Scholar]
- Chen, C.; Liu, M.; Lin, J.; Wang, B.; Wang, Y. Piezoelectric transformer-based high conversion ratio interface for driving dielectric actuator in micro robotic applications. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Luo, F.L.; Ye, H. Positive output cascade boost converters. IEE Proc. Electr. Power Appl. 2004, 151, 590–606. [Google Scholar] [CrossRef]
- Liang, T.J.; Chen, S.M.; Yang, S.L.; Chen, J.F.; Ioinovici, A. A single switch boost-flyback dc-dc converter integrated with switched-capacitor cell. In Proceedings of the IEEE 8th International Conference on Power Electronics and Ecce Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2782–2787. [Google Scholar]
- Liao, W.C.; Liang, T.J.; Liang, H.H.; Liao, H.K.; Juang, K.C.; Chen, J.F. Study and implementation of a novel bidirectional dc-dc converter with high conversion ratio. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011. [Google Scholar]
- Campolo, D.; Sitti, M.; Fearing, R.S. Efficient charge recovery method for driving piezoelectric actuators with quasi-square waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 237–244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Edamana, B.; Oldham, K. Optimal on-off controller with charge recovery for thin-film piezoelectric actuators for an autonomous mobile micro-robot. In Proceedings of the American Controls Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Zsurzsan, G.T.; Zhang, Z.; Andersen, M.M.A.; Andersen, N.A. Class-D amplifier design and performance for driving a piezo actuator drive servomotor. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016. [Google Scholar]
- Clingman, J.C.; Gamble, M. High-voltage switching piezo drive amplifier. In Proceedings of the 5th Annual International Symposium on Smart Structures and Materials, San Diego, CA, USA, 1–5 March 1998. [Google Scholar]
- Luan, J. Design and Development of High-Frequency Switching Amplifiers Used for Smart Material Actuators with Current-Mode Control. Master’s Thesis, Virginia State University, Blacksburg, VA, USA, 29 July 1998. [Google Scholar]
- Gnad, G.; Kasper, R. Power Drive Circuits for Piezo-Electric Actuators in Automotive Applications. In Proceedings of the IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 1597–1600. [Google Scholar]
- Guan, M.; Liao, W.H. Studies on the circuit models of piezoelectric ceramics. In Proceedings of the International Conference on Information Acquisition, 2004, Proceedings, Hefei, China, 21–25 June 2004; pp. 26–31. [Google Scholar]
- Rios, S.A.; Fleming, A.J. A new electrical configuration for improving the range of piezoelectric bimorph benders. Sens. Actuators A 2015, 224, 106–110. [Google Scholar] [CrossRef]
- Small, high-voltage boost converters. Maxim Semiconductor Application Note 1109. 2002. Available online: https://www.maximintegrated.com/en/app-notes/index.mvp/id/1109 (accessed on 12 September 2018).
- Karpelson, M.; Whitney, J.P.; Wei, G.Y.; Wood, R.J. Design and Fabrication of Ultralight High-Voltage Power Circuits for Flapping-Wing Robotic Insects. In Proceedings of the Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; pp. 2070–2077. [Google Scholar]
- Honda, J.; Adams, J. Class D Audio Amplifier Basics. Amp Nch. 2005. International Rectifier Application Note AN-1071. Available online: https://www.infineon.com/dgdl/an-1071.pdf?fileId=5546d462533600a40153559538eb0ff1 (accessed on 12 September 2018).
- Janocha, H.; Stiebel, C. New approach to a switching amplifier for piezoelectric actuators. Energy 1998, 2, 2. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Static Parameters | Value | Dynamic Parameters | Mode 1 | Mode 2 | Mode 3 | Mode 4 |
|---|---|---|---|---|---|---|
| C0 | 24 nF | Ln | 580 H | 812 mH | 422 mH | 15 mH |
| Rs | 1Ω | Cn | 3 nF | 2.85 nF | 1.9 nF | 3 nF |
| Rp | 10 MΩ | Rn | 8.5 MΩ | 7.5 MΩ | 6.7 MΩ | 5.2 MΩ |
| Components | Specifications |
|---|---|
| Vbat | 3.7 V |
| fs (switching frequency) | 55.5 kHz |
| D (duty cycle) | 50% |
| n (turn ratio) | 1:10 |
| Lm | 2 μH |
| C | 1 μF |
| L | 15 μH |
| C1,C2 | 48 nF |
| Device Name | Chip Number | Weight (mg) | Size (mm) |
|---|---|---|---|
| Flyback transformer | lpr4012 (Lm = 2 μH) | 64 | 4 × 4 |
| Power MOSFET (power stage) | SI2304 | 8 | 2.8 × 2.1 |
| Rectifier diode | SMD1200PL | 8 | 2.8 × 2.1 |
| Capacitor (power stage) | 1 μF/200 V | 1.2 | 1.6 × 0.8 |
| Power MOSFET (drive stage) | TN2404K | 8 | 2.8 × 2.1 |
| Inductor (drive stage) | 15 μH/40 mA | 1.2 | 1.6 × 0.8 |
| Output Power (maximum) | 500 mW |
| Efficiency (maximum) | 64.5% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Liu, M.; Wang, Y. A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot. Appl. Sci. 2018, 8, 1666. https://doi.org/10.3390/app8091666
Chen C, Liu M, Wang Y. A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot. Applied Sciences. 2018; 8(9):1666. https://doi.org/10.3390/app8091666
Chicago/Turabian StyleChen, Chen, Meng Liu, and Yanzhang Wang. 2018. "A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot" Applied Sciences 8, no. 9: 1666. https://doi.org/10.3390/app8091666
APA StyleChen, C., Liu, M., & Wang, Y. (2018). A Dual Stage Low Power Converter Driving for Piezoelectric Actuator Applied in Micro Mobile Robot. Applied Sciences, 8(9), 1666. https://doi.org/10.3390/app8091666