Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
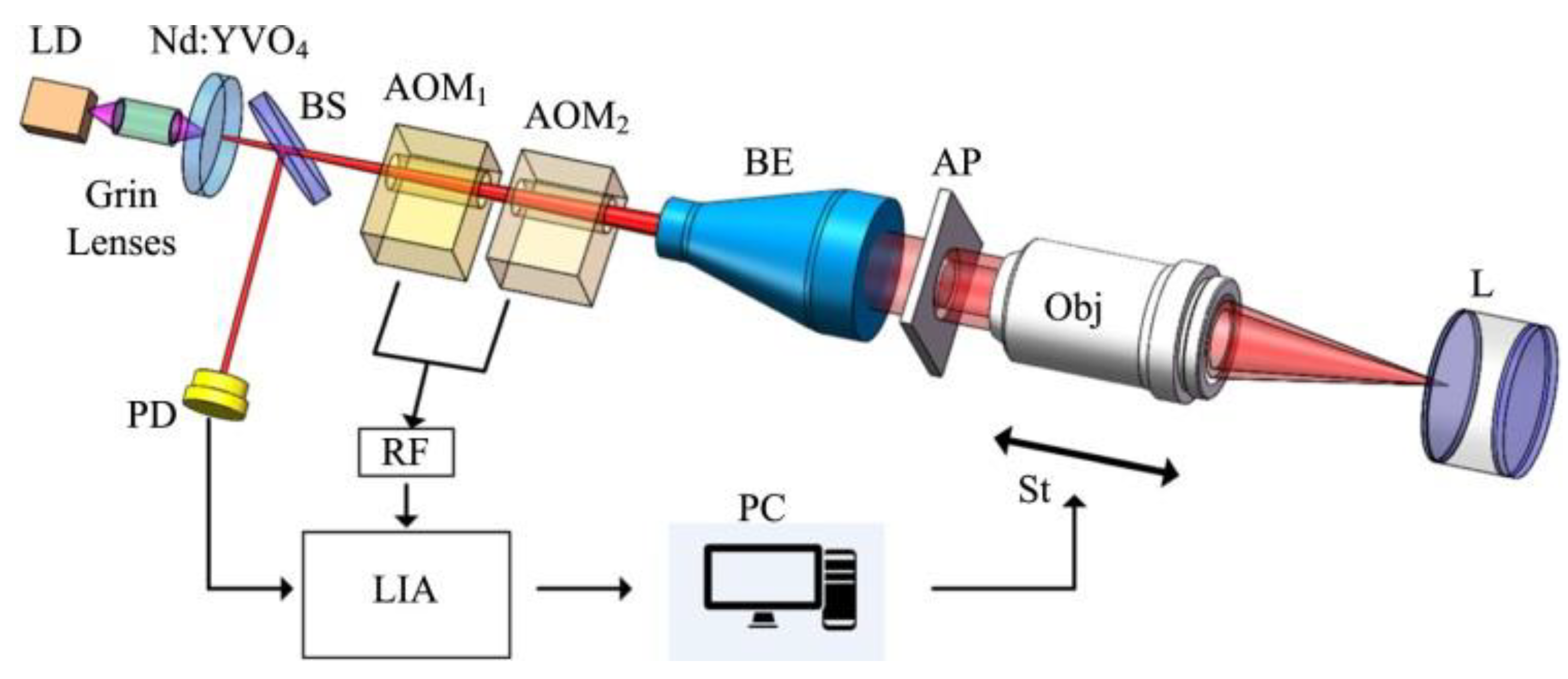
2. Experimental Setup and Theoretical Analysis
2.1. Laser Frequency-Shifted Optical Feedback
2.2. Laser Confocal Feedback Tomography
3. Applications of the Laser Feedback Interferometer
3.1. Displacement Sensing
3.2. Vibration Sensing
3.3. Particle Sensing
3.4. Liquid Evaporation Rate Measurement
3.5. Refractive Index Measurement
3.6. Thermal Expansion Coefficient Measurement
3.7. Gear Measurement
4. Applications of the Laser Confocal Feedback Tomography
4.1. Microstructure Imaging and Measuring
4.2. Profilometry
4.3. Lens Thickness Measurement
4.4. Laser Confocal Feedback Imaging Combined with Other Technologies
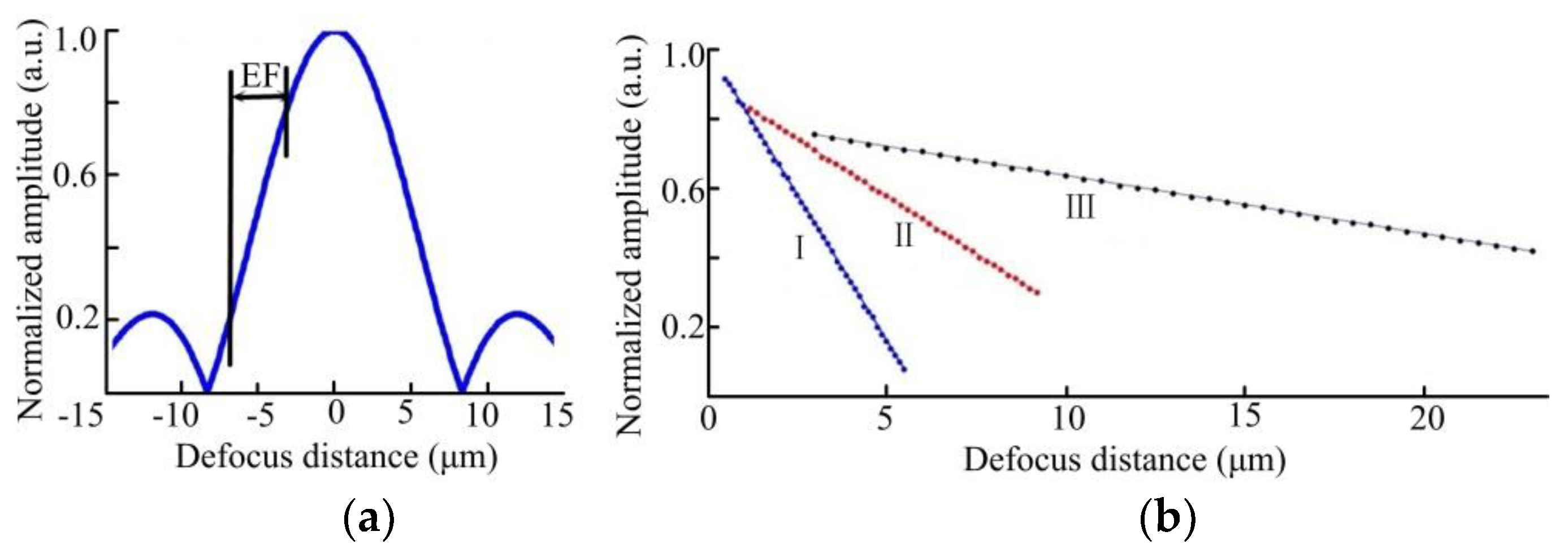
4.4.1. Depth of Focus Extension in Laser Frequency-Shifted Feedback Imaging
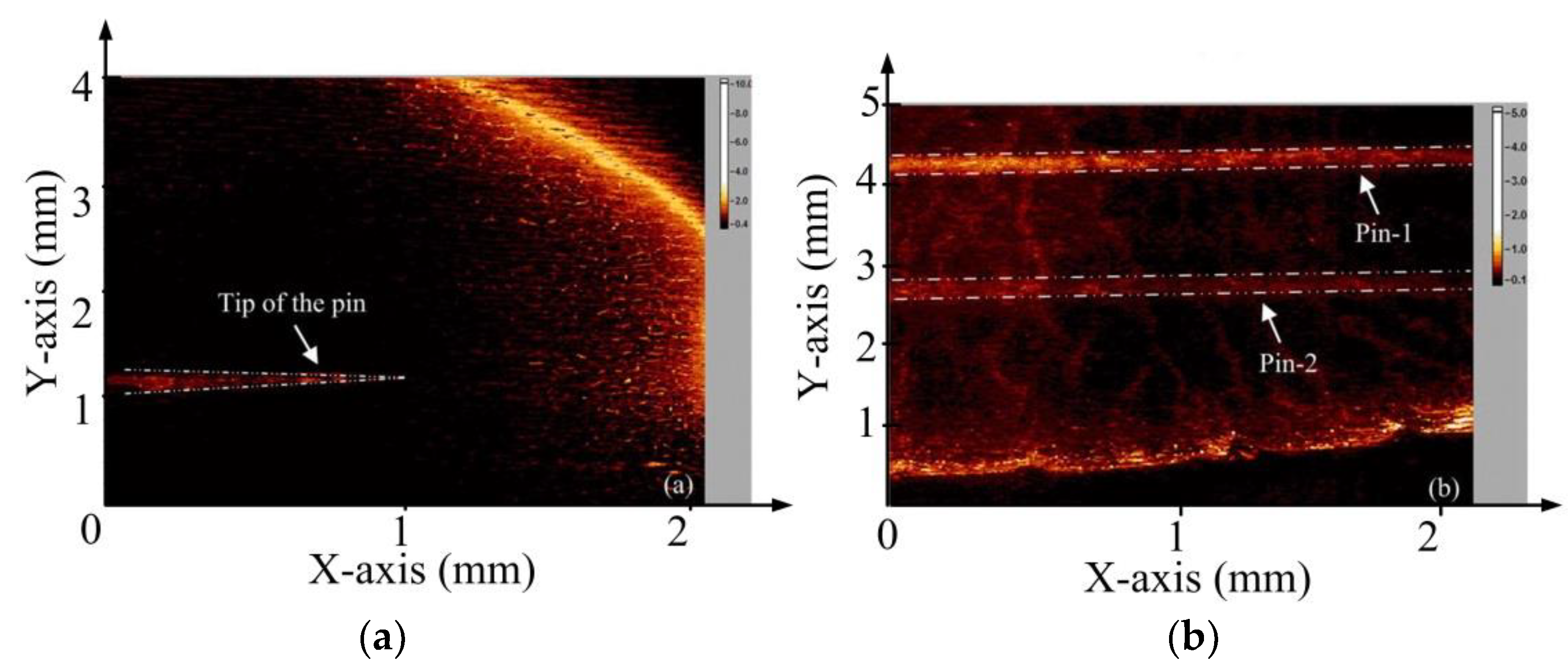
4.4.2. Ultrasound Modulated Laser Confocal Feedback Imaging
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- King, P.G.R.; Steward, G.J. Metrology with an optical maser. New Sci. 1963, 17, 14. [Google Scholar]
- Taimre, T.; Nikolić, M.; Bertling, K.; Lim, Y.L.; Bosch, T.; Rakić, A.D. Laser feedback interferometry: A tutorial on the self-mixing effect for coherent sensing. Adv. Opt. Photonics 2015, 7, 570–631. [Google Scholar] [CrossRef]
- Li, J.; Niu, H.; Niu, Y. Laser feedback interferometry and applications: A review. Opt. Eng. 2017, 56, 050901. [Google Scholar] [CrossRef]
- Otsuka, K.; Kawai, R.; Asakawa, Y. Ultrahigh-sensitivity self-mixing laser Doppler velocimetry with laser-diode-pumped microchip LiNdP4O12 lasers. IEEE Photonics Technol. Lett. 1999, 11, 706–708. [Google Scholar] [CrossRef]
- Timmermans, C.J.; Schellekens, P.H.J.; Schram, D.C. A phase quadrature feedback interferometer using a two-mode He-Ne laser. J. Phys. E Sci. Instrum. 1978, 11, 1023. [Google Scholar] [CrossRef]
- Besnard, P.; Jia, X.; Dalgliesh, R.; May, A.D.; Stephan, G. Polarization switching in a microchip Nd: YAG laser using polarized feedback. J. Opt. Soc. Am. B 1993, 10, 1605–1609. [Google Scholar] [CrossRef]
- Lang, R.; Kobayashi, K. External optical feedback effects on semiconductor injection laser properties. IEEE J. Quantum Electron. 1980, 16, 347–355. [Google Scholar] [CrossRef]
- Lenstra, D.; Van Vaalen, M.; Jaskorzyńska, B. On the theory of a single-mode laser with weak optical feedback. Phys. B+C 1984, 125, 255–264. [Google Scholar] [CrossRef]
- Wang, W.M.; Boyle, W.J.O.; Grattan, K.T.V.; Palmer, A.W. Self-mixing interference in a diode laser: Experimental observations and theoretical analysis. Appl. Opt. 1993, 32, 1551–1558. [Google Scholar] [CrossRef]
- Bosch, T.; Servagent, N.; Lescure, M. A displacement sensor for spectrum analysis using the optical feedback in a single-mode laser diode. Proc. IEEE Instrum. Meas. Technol. Conf. 1997, 2, 870–873. [Google Scholar] [CrossRef]
- Otsuka, K. Effects of external perturbations on LiNdP4O12 lasers. IEEE J. Quantum Electron. 1979, 15, 655–663. [Google Scholar] [CrossRef]
- Arecchi, F.T.; Lippi, G.L.; Puccioni, G.P.; Tredicce, J.R. Deterministic chaos in laser with injected signal. Opt. Commun. 1984, 51, 308–314. [Google Scholar] [CrossRef]
- Wan, X.; Li, D.; Zhang, S. Quasi-common-path laser feedback interferometry based on frequency shifting and multiplexing. Opt. Lett. 2007, 32, 367–369. [Google Scholar] [CrossRef] [PubMed]
- Zhu, K.; Guo, B.; Lu, Y.; Zhang, S.; Tan, Y. Single-spot two-dimensional displacement measurement based on self-mixing interferometry. Optica 2017, 4, 729–735. [Google Scholar] [CrossRef]
- Otsuka, K. Self-mixing thin-slice solid-state laser Doppler velocimetry with much less than one feedback photon per Doppler cycle. Opt. Lett. 2015, 40, 4603–4606. [Google Scholar] [CrossRef]
- Otsuka, K.; Abe, K.; Ko, J.Y.; Lim, T.S. Real-time nanometer-vibration measurement with a self-mixing microchip solid-state laser. Opt. Lett. 2002, 27, 1339–1341. [Google Scholar] [CrossRef] [PubMed]
- Abe, K.; Otsuka, K.; Ko, J.Y. Self-mixing laser Doppler vibrometry with high optical sensitivity: Application to real-time sound reproduction. New J. Phys. 2003, 5, 8. [Google Scholar] [CrossRef]
- Sudo, S.; Miyasaka, Y.; Nemoto, K.; Kamikariya, K.; Otsuka, K. Detection of small particles in fluid flow using a self-mixing laser. Opt. Express 2007, 15, 8135–8145. [Google Scholar] [CrossRef]
- Zhang, S.; Tan, Y.; Zhang, S. Non-contact angle measurement based on parallel multiplex laser feedback interferometry. Chin. Phys. B 2014, 23, 114202. [Google Scholar] [CrossRef]
- Szwaj, C.; Lacot, E.; Hugon, O. Large linewidth-enhancement factor in a microchip laser. Phys. Rev. A 2004, 70, 033809. [Google Scholar] [CrossRef]
- Zhang, S.; Sun, L.; Tan, Y. Spectrum broadening in optical frequency-shifted feedback of microchip laser. IEEE Photonics Technol. Lett. 2016, 28, 1593–1596. [Google Scholar] [CrossRef]
- Qin, C.; Feng, J.; Zhu, S.; Ma, X.; Zhong, J.; Wu, P.; Jin, Z.; Tian, J. Recent advances in bioluminescence tomography: Methodology and system as well as application. Laser Photonics Rev. 2014, 8, 94–114. [Google Scholar] [CrossRef]
- Liba, O.; Lew, M.D.; SoRelle, E.D.; Dutta, R.; Sen, D.; Moshfeghi, D.M.; Chu, S.; de La Zerda, A. Speckle-modulating optical coherence tomography in living mice and humans. Nat. Commun. 2017, 8, 15845. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hillman, E.M.; Burgess, S.A. Sub-millimeter resolution 3D optical imaging of living tissue using laminar optical tomography. Laser Photonics Rev. 2009, 3, 159–179. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bychkov, A.; Simonova, V.; Zarubin, V.; Cherepetskaya, E.; Karabutov, A. The Progress in Photoacoustic and Laser Ultrasonic Tomographic Imaging for Biomedicine and Industry: A Review. Appl. Sci. 2018, 8, 1931. [Google Scholar] [CrossRef]
- Wang, L.V.; Wu, H. Biomedical Optics: Principles and Imaging; John Wiley & Sons: Hoboken, NJ, USA, 2007; pp. 1–8. ISBN 978–0-471-74304-0. [Google Scholar]
- Wilson, T. Confocal Microscopy; Academic Press: London, UK, 1990; pp. 1–64. ISBN 978–1-4899-1494-1. [Google Scholar]
- Qiu, L.; Liu, D.; Zhao, W.; Cui, H.; Sheng, Z. Real-time laser differential confocal microscopy without sample reflectivity effects. Opt. Express 2014, 22, 21626–21640. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Qiu, L.; Zhao, X.; Zhao, W. Divided-aperture differential confocal fast-imaging microscopy. Meas. Sci. Technol. 2017, 28, 035401. [Google Scholar] [CrossRef]
- Durduran, T.; Choe, R.; Baker, W.B.; Yodh, A.G. Diffuse optics for tissue monitoring and tomography. Rep. Prog. Phys. 2010, 73, 076701. [Google Scholar] [CrossRef] [Green Version]
- Eggebrecht, A.T.; Ferradal, S.L.; Robichaux-Viehoever, A.; Hassanpour, M.S.; Dehghani, H.; Snyder, A.Z.; Hershey, T.; Culver, J.P. Mapping distributed brain function and networks with diffuse optical tomography. Nat. Photonics 2014, 8, 448–454. [Google Scholar] [CrossRef] [Green Version]
- Hong, G.; Antaris, A.L.; Dai, H. Near-infrared fluorophores for biomedical imaging. Nat. Biomed. Eng. 2017, 1, 0010. [Google Scholar] [CrossRef]
- Sevick-Muraca, E.M. Translation of near-infrared fluorescence imaging technologies: Emerging clinical applications. Annu. Rev. Med. 2012, 217–231. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Swanson, E.A.; Lin, C.P.; Schuman, J.S.; Stinson, W.G.; Chang, W.; Hee, M.R.; Flotte, T.; Gregory, K.; Puliafito, C.A. Optical coherence tomography. Science 1991, 254, 1178–1181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, L.; Sun, L.; Ding, W. Multifocal spectral-domain optical coherence tomography based on Bessel beam for extended imaging depth. J. Biomed. Opt. 2017, 22, 106016. [Google Scholar] [CrossRef]
- De Boer, J.F.; Leitgeb, R.; Wojtkowski, M. Twenty-five years of optical coherence tomography: The paradigm shift in sensitivity and speed provided by Fourier domain OCT. Biomed. Opt. Express 2017, 8, 3248–3280. [Google Scholar] [CrossRef] [PubMed]
- Lacot, E.; Day, R.; Stoecke, F. Laser optical feedback tomography. Opt. Lett. 1999, 24, 744–746. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Wang, W.; Xu, C.; Zhang, S. Laser confocal feedback tomography and nano-step height measurement. Sci. Rep. 2013, 3, 2971. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Zhang, S.; Xu, C.; Zhao, S. Inspecting and locating foreign body in biological sample by laser confocal feedback technology. Appl. Phys. Lett. 2013, 103, 101909. [Google Scholar] [CrossRef]
- Lacot, E.; Day, R.; Stoeckel, F. Coherent laser detection by frequency-shifted optical feedback. Phys. Rev. A 2001, 64, 043815. [Google Scholar] [CrossRef]
- Lacot, E.; Hugon, O. Frequency-shifted optical feedback in a pumping laser diode dynamically amplified by a microchip laser. Appl. Opt. 2004, 43, 4915–4921. [Google Scholar] [CrossRef]
- Tan, Y.; Xu, C.; Zhang, S.; Zhang, S. Power spectral characteristic of a microchip Nd:YAG laser subjected to frequency-shifted optical feedback. Laser Phys. Lett. 2013, 10, 025001. [Google Scholar] [CrossRef]
- Gu, M. Principles of Three Dimensional Imaging in Confocal Microscopes; World Scientific Publishing Co. Inc.: Singapore, 1996; pp. 311–324. ISBN 981-02-2550-4. [Google Scholar]
- Zhang, S.; Tan, Y.; Ren, Z.; Zhang, Y.; Zhang, S. A microchip laser feedback interferometer with nanometer resolution and increased measurement speed based on phase meter. Appl. Phys. B 2014, 116, 609–616. [Google Scholar] [CrossRef]
- Zhang, S.; Tan, Y.; Zhang, S. High-speed Non-contact Displacement Sensor Based on Microchip Nd:YVO4 Laser Feedback Interferometry. In Optical Sensors; Optical Society of America: Washington, DC, USA, 2014; p. SeTh1D-4. [Google Scholar]
- Ren, Z.; Li, D.; Wan, X.J.; Zhang, S. Quasi-common-path microchip laser feedback interferometry with a high stability and accuracy. Laser Phys. 2008, 18, 939–946. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Tan, Y.; Sun, L. Self-mixing interferometry with mutual independent orthogonal polarized light. Opt. Lett. 2016, 41, 844–846. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, S.; Tan, Y.; Sun, L. Common-path heterodyne self-mixing interferometry with polarization and frequency multiplexing. Opt. Lett. 2016, 41, 4827–4830. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Zhang, S.; Sun, L.; Tan, Y. Fiber self-mixing interferometer with orthogonally polarized light compensation. Opt. Express 2016, 24, 26558–26564. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Tan, Y.; Zhang, S. Full path compensation laser feedback interferometry for remote sensing with recovered nanometer resolutions. Rev. Sci. Instrum. 2018, 89, 033108. [Google Scholar] [CrossRef]
- Shi, L.; Kong, L.; Guo, D.; Xia, W.; Ni, X.; Hao, H.; Wang, M. Note: Simultaneous measurement of in-plane and out-of-plane displacement by using orthogonally polarized self-mixing grating interferometer. Rev. Sci. Instrum. 2018, 89, 096113. [Google Scholar] [CrossRef]
- Hsieh, H.L.; Chen, J.C.; Lerondel, G.; Lee, J.Y. Two-dimensional displacement measurement by quasi-common-optical-path heterodyne grating interferometer. Opt. Express 2011, 19, 9770–9782. [Google Scholar] [CrossRef]
- Yang, S.; Gao, Z.; Ruan, H.; Gao, C.; Wang, X.; Sun, X.; Wen, X. Non-Contact and Real-Time Measurement of Kolsky Bar with Temporal Speckle Interferometry. Appl. Sci. 2018, 8, 808. [Google Scholar] [CrossRef]
- Barile, C.; Casavola, C.; Pappalettera, G.; Pappalettere, C. Remarks on residual stress measurement by hole-drilling and electronic speckle pattern interferometry. Sci. World J. 2014, 2014, 487149. [Google Scholar] [CrossRef]
- Lu, H.; Cary, P.D. Deformation measurements by digital image correlation: Implementation of a second order displacement gradient. Exp. Mech. 2000, 40, 393–400. [Google Scholar] [CrossRef]
- Hao, Y.; Bing, P. Three-dimensional displacement measurement based on the combination of digital holography and digital image correlation. Opt. Lett. 2014, 39, 5166–5169. [Google Scholar] [CrossRef]
- Pfister, T.; Günther, P.; Nöthen, M.; Czarske, J. Heterodyne laser Doppler distance sensor with phase coding measuring stationary as well as laterally and axially moving objects. Meas. Sci. Technol. 2009, 21, 025302. [Google Scholar] [CrossRef]
- Rothberg, S.J.; Allen, M.S.; Castellini, P.; Di Maio, D.; Dirckx, J.J.J.; Ewins, D.J.; Halkon, B.J.; Muyshondt, P.; Paone, N.; Ryan, T.; et al. An international review of laser Doppler vibrometry: Making light work of vibration measurement. Opt. Laser Eng. 2017, 99, 11–22. [Google Scholar] [CrossRef] [Green Version]
- Ohtomo, T.; Sudo, S.; Otsuka, K. Three-channel three-dimensional self-mixing thin-slice solid-state laser-Doppler measurements. Appl. Opt. 2009, 48, 609–616. [Google Scholar] [CrossRef] [PubMed]
- Otsuka, K. Long-haul self-mixing interference and remote sensing of a distant moving target with a thin-slice solid-state laser. Opt. Lett. 2014, 39, 1069–1072. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Du, Z.; Deng, J.; Cai, X.; Yu, B.; Lu, L. A study of vibration system characteristics based on laser self-mixing interference effect. J. Appl. Phys. 2012, 112, 023106. [Google Scholar] [CrossRef]
- Tao, Y.; Wang, M.; Xia, W. Semiconductor laser self-mixing micro-vibration measuring technology based on Hilbert transform. Opt. Commun. 2016, 368, 12–19. [Google Scholar] [CrossRef]
- Dai, X.; Wang, M.; Zhao, Y.; Zhou, J. Self-mixing interference in fiber ring laser and its application for vibration measurement. Opt. Express 2009, 17, 16543–16548. [Google Scholar] [CrossRef]
- Sudo, S.; Ohtomo, T.; Otsuka, K. Observation of motion of colloidal particles undergoing flowing Brownian motion using self-mixing laser velocimetry with a thin-slice solid-state laser. Appl. Opt. 2015, 54, 6832–6840. [Google Scholar] [CrossRef]
- Ohtomo, T.; Sudo, S.; Otsuka, K. Detection and counting of a submicrometer particle in liquid flow by self-mixing microchip Yb: YAG laser velocimetry. Appl. Opt. 2016, 55, 7574–7582. [Google Scholar] [CrossRef] [PubMed]
- Tan, Y.; Zhang, S.; Ren, Z.; Zhang, Y.; Zhang, S. Real-time liquid evaporation rate measurement based on a microchip laser feedback interferometer. Chin. Phys. Lett. 2013, 30, 124202. [Google Scholar] [CrossRef]
- Ince, R.; Hüseyinoglu, E. Decoupling refractive index and geometric thickness from interferometric measurements of a quartz sample using a fourth-order polynomial. Appl. Opt. 2007, 46, 3498–3503. [Google Scholar] [CrossRef] [PubMed]
- Harris, J.; Lu, P.; Larocque, H.; Xu, Y.; Chen, L.; Bao, X. Highly sensitive in-fiber interferometric refractometer with temperature and axial strain compensation. Opt. Express 2013, 21, 9996–10009. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Choi, H.; Jin, J.; Cha, M. Measurement of refractive index dispersion of a fused silica plate using Fabry–Perot interference. Appl. Opt. 2016, 55, 6285–6291. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Tan, Q.; Bai, B.; Jin, G. Non-spectroscopic refractometric nanosensor based on a tilted slit-groove plasmonic interferometer. Opt. Express 2011, 19, 20691–20703. [Google Scholar] [CrossRef] [PubMed]
- Cennamo, N.; Zeni, L.; Catalano, E.; Arcadio, F.; Minardo, A. Refractive Index Sensing through Surface Plasmon Resonance in Light-Diffusing Fibers. Appl. Sci. 2018, 8, 1172. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, S.; Tan, Y.; Sun, L. Simultaneous measurement of refractive-index and thickness for optical materials by laser feedback interferometry. Rev. Sci. Instrum. 2014, 85, 083111. [Google Scholar] [CrossRef]
- Xu, L.; Tan, Y.; Zhang, S.; Sun, L. Measurement of refractive index ranging from 1.42847 to 2.48272 at 1064 nm using a quasi-common-path laser feedback system. Chin. Phys. Lett. 2015, 32, 090701. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, S.; Tan, Y.; Zhang, S.; Sun, L. Refractive index measurement of liquids by double-beam laser frequency-shift feedback. IEEE Photonics Technol. Lett. 2016, 28, 1049–1052. [Google Scholar] [CrossRef]
- Zheng, F.; Ding, Y.; Tan, Y.; Lin, J.; Zhang, S. The approach of compensation of air refractive index in thermal expansion coefficients measurement based on laser feedback interferometry. Chin. Phys. Lett. 2015, 32, 070702. [Google Scholar] [CrossRef]
- Zheng, F.; Tan, Y.; Lin, J.; Ding, Y.; Zhang, S. Study of non-contact measurement of the thermal expansion coefficients of materials based on laser feedback interferometry. Rev. Sci. Instrum. 2015, 86, 043109. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Liu, W.; Wang, T. Measurement of thermal expansion coefficient of human teeth. Aust. Dent. J. 1989, 34, 530–535. [Google Scholar] [CrossRef] [PubMed]
- Casavola, C.; Lamberti, L.; Moramarco, V.; Pappalettera, G.; Pappalettere, C. Experimental analysis of thermo-mechanical behaviour of electronic components with speckle interferometry. Strain 2013, 49, 497–506. [Google Scholar] [CrossRef]
- Li, C.; Liu, Q.; Peng, X.; Fan, S. Measurement of thermal expansion coefficient of graphene using optical fiber Fabry-Perot interference. Meas. Sci. Technol. 2016, 27, 075102. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, S.; Tan, Y.; Zhao, S. Inner structure detection by optical tomography technology based on feedback of microchip Nd:YAG lasers. Opt. Express 2013, 21, 11819–11826. [Google Scholar] [CrossRef]
- Xu, C.; Tan, Y.; Zhang, S.; Zhao, S. The structure measurement of Micro-Electro-Mechanical System devices by the optical feedback tomography technology. Appl. Phys. Lett. 2013, 102, 221902. [Google Scholar] [CrossRef]
- Wang, W.; Tan, Y.; Zhang, S.; Li, Y. Microstructure measurement based on frequency-shift feedback in a-cut Nd:YVO4 laser. Chin. Opt. Lett. 2015, 13, 121201. [Google Scholar] [CrossRef]
- Bertling, K.; Perchoux, J.; Taimre, T.; Malkin, R.; Robert, D.; Rakić, A.D.; Bosch, T. Imaging of acoustic fields using optical feedback interferometry. Opt. Express 2014, 22, 30346–30356. [Google Scholar] [CrossRef]
- Girardeau, V.; Jacquin, O.; Hugon, O.; Lacot, E. Ultrasound vibration measurements based on laser optical feedback imaging. Appl. Opt. 2018, 57, 7634–7643. [Google Scholar] [CrossRef]
- Mowla, A.; Du, B.W.; Taimre, T.; Bertling, K.; Wilson, S.; Soyer, H.P.; Rakić, A.D. Confocal laser feedback tomography for skin cancer detection. Biomed. Opt. Express 2017, 8, 4037–4048. [Google Scholar] [CrossRef] [PubMed]
- Hugon, O.; Joud, F.; Lacot, E.; Jacquin, O.; de Chatellus, H.G. Coherent microscopy by laser optical feedback imaging (LOFI) technique. Ultramicroscopy 2011, 111, 1557–1563. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W.; Zhang, S.; Li, Y. Surface microstructure profilometry based on laser confocal feedback. Rev. Sci. Instrum. 2015, 86, 103108. [Google Scholar] [CrossRef] [PubMed]
- Park, J.B.; Lee, J.G.; Lee, M.K.; Lee, E.S. A glass thickness measuring system using the machine vision method. Int. J. Precis. Eng. Manuf. 2011, 12, 769–774. [Google Scholar] [CrossRef]
- Miks, A.; Novak, J.; Novak, P. Analysis of method for measuring thickness of plane-parallel plates and lenses using chromatic confocal sensor. Appl. Opt. 2010, 49, 3259–3264. [Google Scholar] [CrossRef] [PubMed]
- Verrier, I.; Veillas, C.; Lépine, T. Low coherence interferometry for central thickness measurement of rigid and soft contact lenses. Opt. Express 2009, 17, 9157–9170. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Qiu, L.; Yang, J.; Zhao, W. Measurement of the refractive index and thickness for lens by confocal technique. Optik 2013, 124, 2825–2828. [Google Scholar] [CrossRef]
- Zhao, W.; Sun, R.; Qiu, L.; Shi, L.; Sha, D. Lenses axial space ray tracing measurement. Opt. Express 2010, 18, 3608–3617. [Google Scholar] [CrossRef]
- Tan, Y.; Zhu, K.; Zhang, S. New method for lens thickness measurement by the frequency-shifted confocal feedback. Opt. Commun. 2016, 380, 91–94. [Google Scholar] [CrossRef]
- Häusler, G. A method to increase the depth of focus by two step image processing. Opt. Commun. 1972, 6, 38–42. [Google Scholar] [CrossRef]
- Fernández-Domínguez, A.I.; Liu, Z.; Pendry, J.B. Coherent fourfold super-resolution imaging with composite photonic-plasmonic structured illumination. ACS Photonics 2015, 2, 341–348. [Google Scholar] [CrossRef]
- Lu, Y.; Zhu, K.; Li, J.; Zhang, S.; Tan, Y. Depth of focus extension by filtering in the frequency domain in laser frequency-shifted feedback imaging. Appl. Opt. 2018, 57, 5823–5830. [Google Scholar] [CrossRef] [PubMed]
- Zhu, K.; Lu, Y.; Zhang, S.; Ruan, H.; Usuki, S.; Tan, Y. Ultrasound modulated laser confocal feedback imaging inside turbid media. Opt. Lett. 2018, 43, 1207–1210. [Google Scholar] [CrossRef] [PubMed]
- Leutz, W.; Maret, G. Ultrasonic modulation of multiply scattered light. Phys. B Condens. Matter 1995, 204, 14–19. [Google Scholar] [CrossRef]
- Wang, L.V. Mechanisms of ultrasonic modulation of multiply scattered coherent light: An analytic model. Phys. Rev. Lett. 2001, 87, 043903. [Google Scholar] [CrossRef] [PubMed]



























© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, K.; Chen, H.; Zhang, S.; Shi, Z.; Wang, Y.; Tan, Y. Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser. Appl. Sci. 2019, 9, 109. https://doi.org/10.3390/app9010109
Zhu K, Chen H, Zhang S, Shi Z, Wang Y, Tan Y. Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser. Applied Sciences. 2019; 9(1):109. https://doi.org/10.3390/app9010109
Chicago/Turabian StyleZhu, Kaiyi, Hongfang Chen, Shulian Zhang, Zhaoyao Shi, Yun Wang, and Yidong Tan. 2019. "Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser" Applied Sciences 9, no. 1: 109. https://doi.org/10.3390/app9010109
APA StyleZhu, K., Chen, H., Zhang, S., Shi, Z., Wang, Y., & Tan, Y. (2019). Frequency-Shifted Optical Feedback Measurement Technologies Using a Solid-State Microchip Laser. Applied Sciences, 9(1), 109. https://doi.org/10.3390/app9010109