DiRPL: A RPL-Based Resource and Service Discovery Algorithm for 6LoWPANs




Abstract
:Featured Application
Abstract
1. Introduction
2. Related Works
3. DiRPL: RPL-Based Resource and Service Discovery for Constrained IoT Devices
3.1. Node Joining Technique in an RPL DODAG
3.2. RPL-Based Resource Discovery
- (1)
- When a joining node (LEN) appears in the coverage area of the 6LoWPAN network, it starts the ND procedure and sends a DIS message to the node that has been elected as its default parent.
- (2)
- The parent node receives the DIS packet and replies with a DIO message. In this way, the LEN gathers knowledge about the existence of the BR in the 6LoWPAN network, and the DOGAG governing the network itself.
- (3)
- The LEN generates a DAO packet that will be forwarded up to the BR through the DODAG.
- (4)
- The reception of the DAO packet by the BR invokes the creation of a corresponding routing entry in the routing table of the BR itself and, since the BR is hosted on the TelosB mote, this routing insertion triggers an update of the CoAP observable resource /network/last_entered_node.
- (5)
- Recalling the fact that, during the network boot up phase, the CoAP client (internal to the RPi) has started an observing relation on the CoAP resource /network/last_entered_node exposed by the TelosB mote, the updates of this CoAP resource are received and propagated by the BR to its upper layers, for further processing tasks.
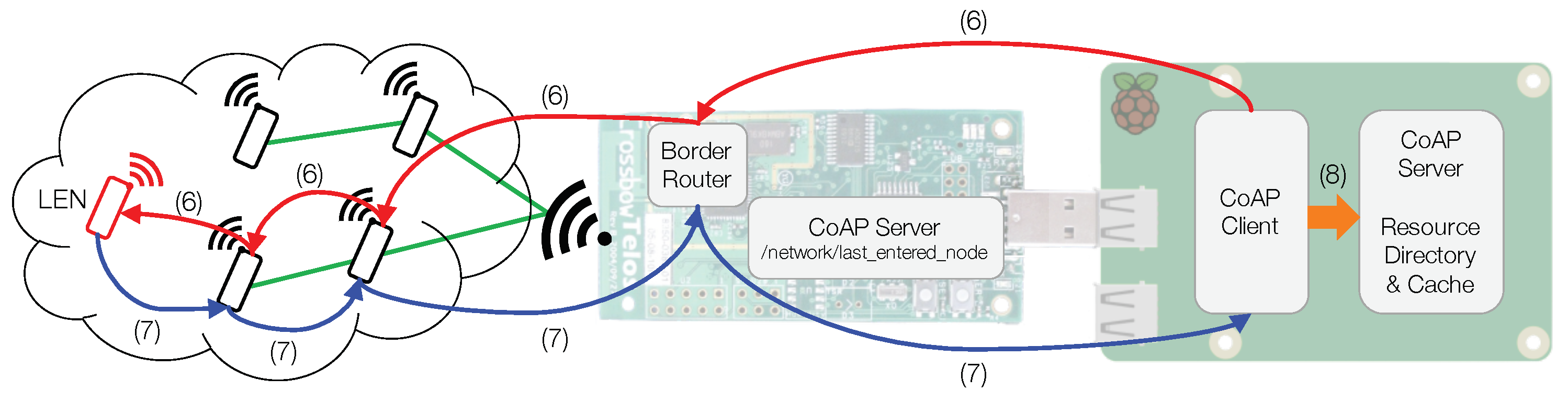
- (6)
- The CoAP client running on the RPi, triggered by the CoAP Observe notification, sends a CoAP GET request to the CoAP resource /.well-known/core of the LEN.
- (7)
- Since the LEN runs an internal CoAP server, it thus can handle the incoming CoAP GET request on its /.well-known/core resource. It replies (in CoRE Link format) to the CoAP client on-board of the RPi with the list of its maintained CoAP resources and services.
- (8)
- Upon reception of the list of CoAP resources hosted by the LEN, the CoAP client running on the RPi requests the CoAP server, hosted on the same platform, to create several CoAP resources equal to received resource list’s size.
4. Experimental Implementation and Performance Evaluation
4.1. Implementation Details
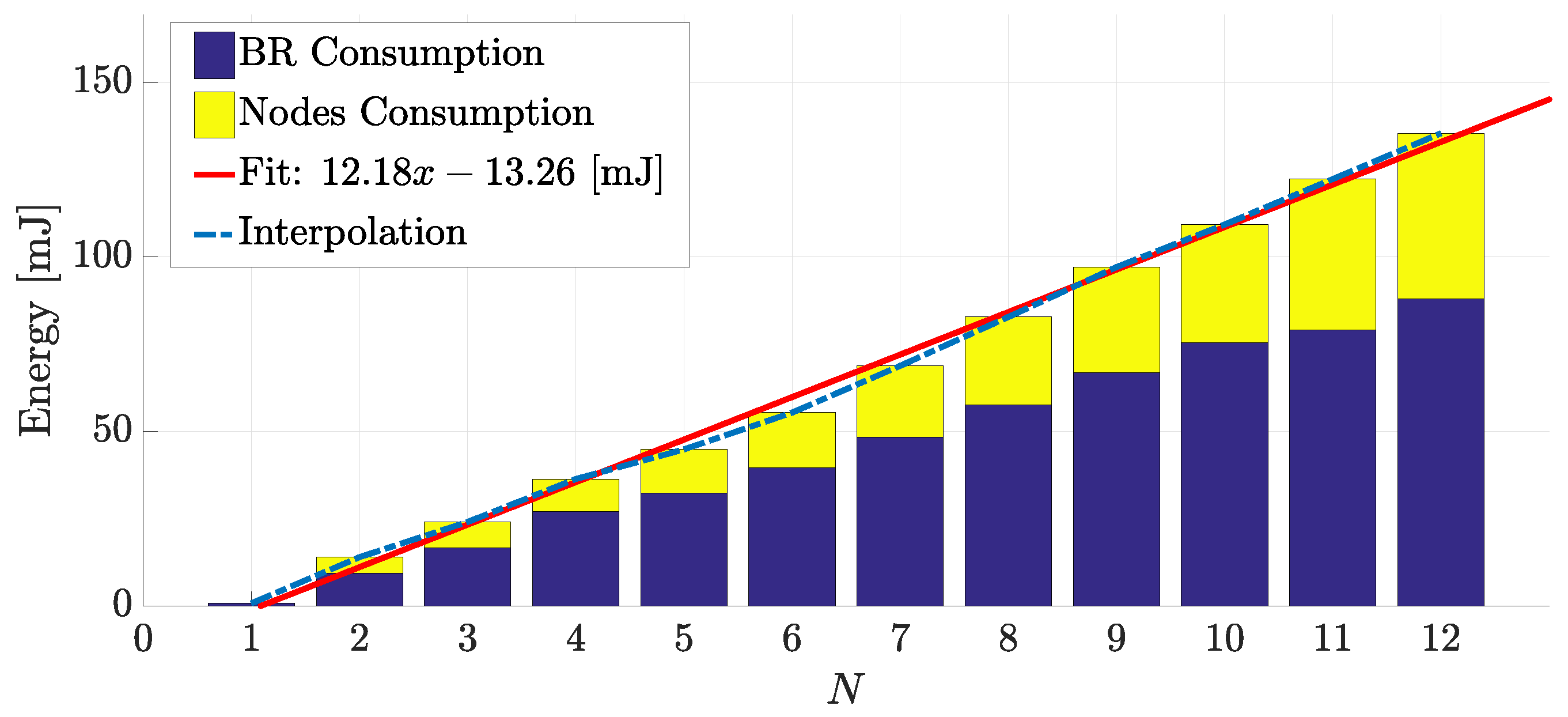
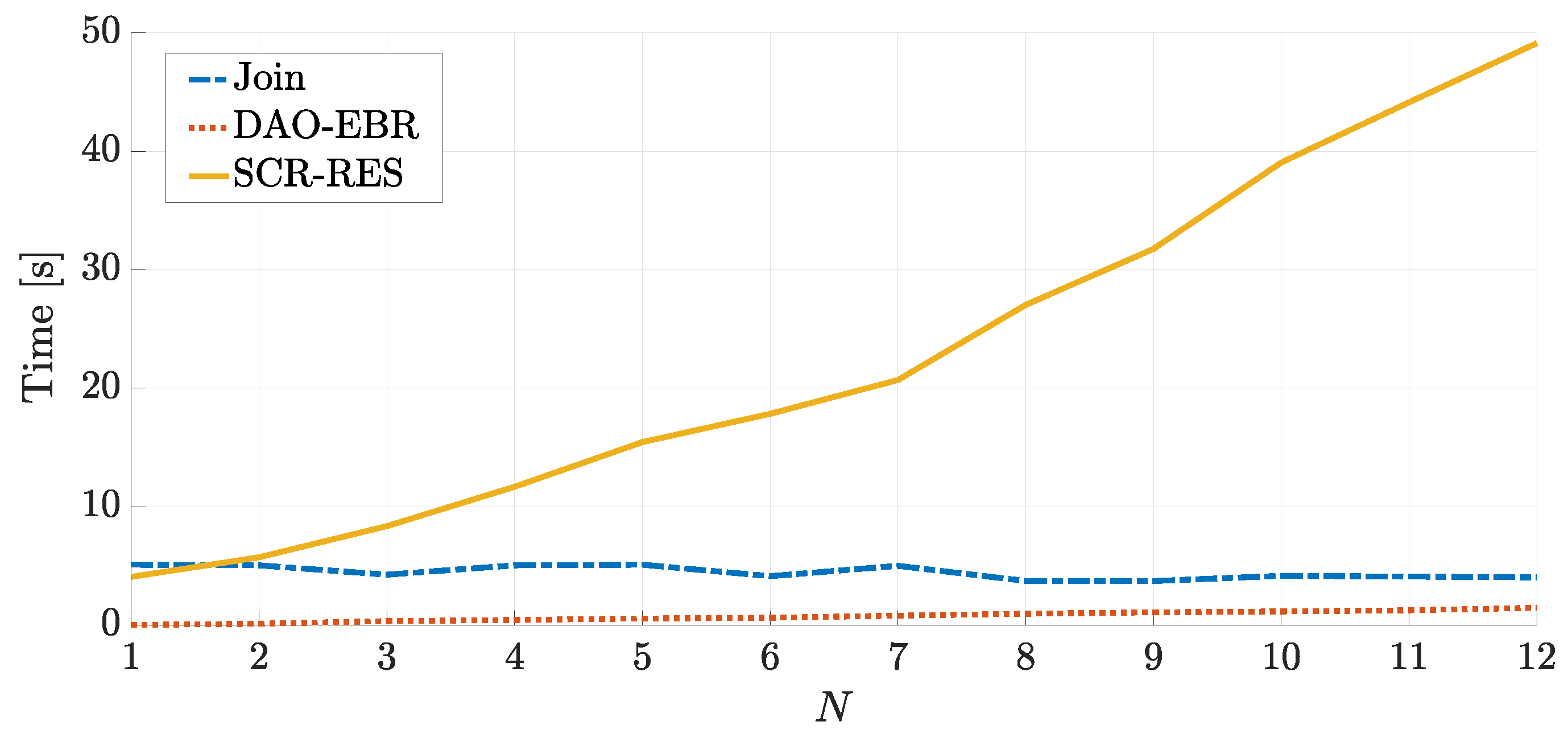
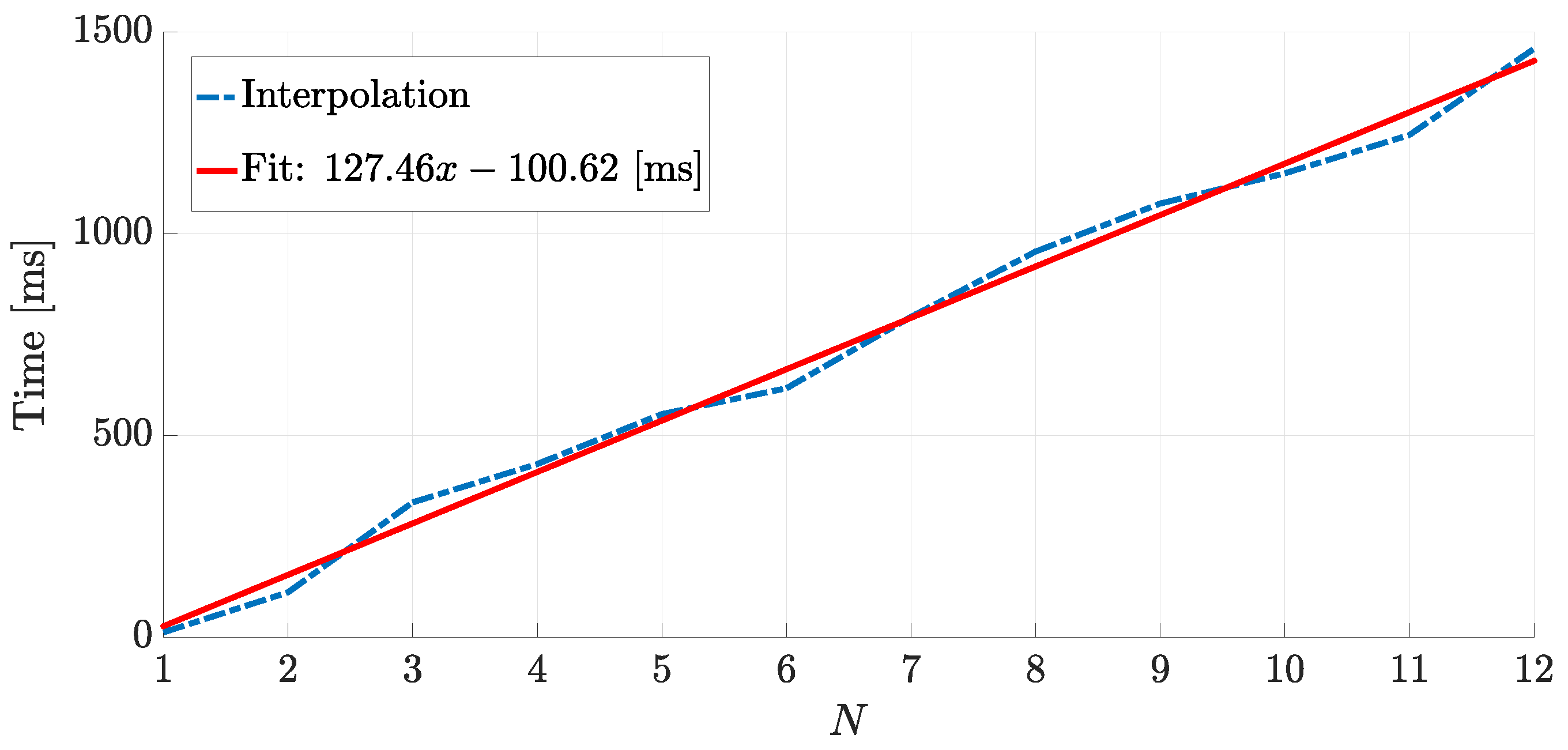
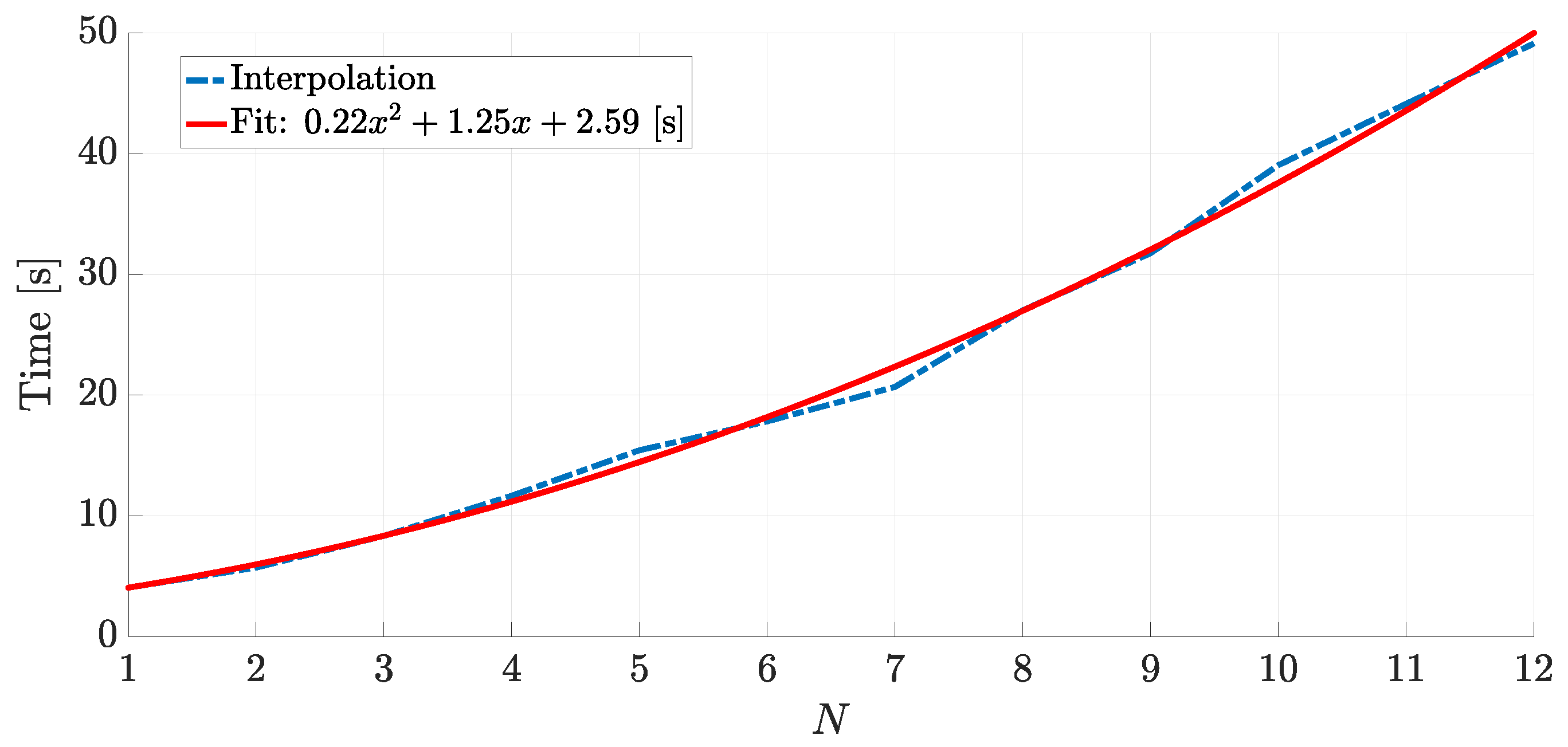
4.2. Performance Analysis with CCR set at 8 Hz
4.3. Performance Analysis with CCR set to 16 Hz
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IETF Routing over Low-Power and Lossy Networks (ROLL) Working Group. Available online: https://datatracker.ietf.org/wg/roll/ (accessed on 23 October 2018).
- IETF IPv6 over Low-Power Wireless Personal Area Network (6LoWPAN) Working Group. Available online: https://datatracker.ietf.org/wg/6lowpan/ (accessed on 23 October 2018).
- Winter, T.; Thubert, P.; Brandt, A.; Hui, J.; Kelsey, R.; Levis, P.; Pister, K.; Struik, R.; Vasseur, J.; Alexander, R. RPL: IPv6 Routing Protocol for Low-Power and Lossy Networks; RFC 6550; Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Montenegro, G.; Kushalnagar, N.; Hui, J.; Culler, D. Transmission of IPv6 Packets over IEEE 802.15.4 Networks; RFC 4944; Internet Engineering Task Force: Fremont, CA, USA, 2007. [Google Scholar]
- Shelby, Z.; Hartke, K.; Bormann, C. The Constrained Application Protocol (CoAP); RFC 7252; Internet Engineering Task Force: Fremont, CA, USA, 2014. [Google Scholar]
- Shelby, Z. Constrained RESTful Environments (CoRE) Link Format; RFC 6690; Internet Engineering Task Force: Fremont, CA, USA, 2012. [Google Scholar]
- Baccelli, E.; Hahm, O.; Wählisch, M.; Günes, M.; Schmidt, T. RIOT: One OS to Rule Them All in the IoT; Research Report RR-8176; INRIA: Le Chesnay, France, 2012. [Google Scholar]
- Guttman, E.; Perkins, C.; Veizades, J. Service Location Protocol, Version 2; RFC 2608; Internet Engineering Task Force: Fremont, CA, USA, 1999. [Google Scholar]
- Guttman, E. Vendor Extensions for Service Location Protocol, Version 2; RFC 3224; Internet Engineering Task Force: Fremont, CA, USA, 2002. [Google Scholar]
- UPnP Standards & Architecture. 1999. Available online: https://openconnectivity.org/developer/specifications/upnp-resources/upnp (accessed on 23 October 2018).
- Kovacevic, A.; Ansari, J.; Mahonen, P. NanoSD: A Flexible Service Discovery Protocol for Dynamic and Heterogeneous Wireless Sensor Networks. In Proceedings of the IEEE Sixth International Conference on Mobile Ad-hoc and Sensor Networks, Hangzhou, China, 20–22 December 2010; pp. 14–19. [Google Scholar] [CrossRef]
- Butt, T.A.; Phillips, I.; Guan, L.; Oikonomou, G. TRENDY: An Adaptive and Context-aware Service Discovery Protocol for 6LoWPANs. In Proceedings of the Third International Workshop on the Web of Things (WoT’12), Newcastle, UK, 19 June 2012; pp. 2:1–2:6. [Google Scholar] [CrossRef]
- Cirani, S.; Davoli, L.; Ferrari, G.; Leone, R.; Medagliani, P.; Picone, M.; Veltri, L. A Scalable and Self-Configuring Architecture for Service Discovery in the Internet of Things. IEEE Internet Things J. 2014, 1, 508–521. [Google Scholar] [CrossRef]
- ZeroConf Suite. Available online: http://zeroconf.org/ (accessed on 23 October 2018).
- Cheshire, S.; Krochmal, M. DNS-Based Service Discovery; RFC 6763; Internet Engineering Task Force: Fremont, CA, USA, 2013. [Google Scholar]
- Stolikj, M.; Verhoeven, R.; Cuijpers, P.J.L.; Lukkien, J.J. Proxy support for service discovery using mDNS/DNS-SD in low power networks. In Proceedings of the IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks, Sydney, Australia, 19 June 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Klauck, R. Seamless Integration of Smart Objects into the Internet Using XMPP and mDNS/DNS-SD. Ph.D. Thesis, Brandenburg University of Technology Cottbus-Senftenberg, Senftenberg, Germany, 2016. [Google Scholar]
- Hui, J.; Kelsey, R. Multicast Protocol for Low-Power and Lossy Networks (MPL); RFC 7731; Internet Engineering Task Force: Fremont, CA, USA, 2016. [Google Scholar]
- Oikonomou, G.; Phillips, I. Stateless multicast forwarding with RPL in 6LowPAN sensor networks. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Lugano, Switzerlan, 19–23 March 2012; pp. 272–277. [Google Scholar] [CrossRef]
- Antonini, M.; Cirani, S.; Ferrari, G.; Medagliani, P.; Picone, M.; Veltri, L. Lightweight multicast forwarding for service discovery in low-power IoT networks. In Proceedings of the 2014 IEEE 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 133–138. [Google Scholar] [CrossRef]
- IoTivity. Available online: https://www.iotivity.org/ (accessed on 23 October 2018).
- Davoli, L.; Belli, L.; Cilfone, A.; Ferrari, G. Integration of Wi-Fi mobile nodes in a Web of Things Testbed. ICT Express 2016, 2, 96–99. [Google Scholar] [CrossRef]
- TelosB Mote Platform. Available online: https://goo.gl/ENwrcX (accessed on 23 October 2018).
- Web of Things Testbed (WoTT). Available online: http://iotlab.unipr.it/wott (accessed on 23 October 2018).
- Belli, L.; Cirani, S.; Davoli, L.; Gorrieri, A.; Mancin, M.; Picone, M.; Ferrari, G. Design and Deployment of an IoT Application-Oriented Testbed. Computer 2015, 48, 32–40. [Google Scholar] [CrossRef]
- Gulbrandsen, A.; Vixie, P.; Esibov, L. A DNS RR for Specifying the Location of Services (DNS SRV); RFC 2782; Internet Engineering Task Force: Fremont, CA, USA, 2000. [Google Scholar]
- WisMote. Available online: https://goo.gl/PceaQ3 (accessed on 23 October 2018).
- Roussel, K.; Song, Y.Q.; Zendra, O. Using Cooja for WSN Simulations: Some New Uses and Limits. In Proceedings of the EWSN 2016—NextMote Workshop, Graz, Austria, 15–17 February 2016; Roemer, K., Ed.; Junction Publishing: Graz, Austria, 2016; pp. 319–324. [Google Scholar]
- Kovatsch, M.; Duquennoy, S.; Dunkels, A. A Low-Power CoAP for Contiki. In Proceedings of the 8th IEEE International Conference on Mobile Ad-hoc and Sensor Systems (MASS 2011), Valencia, Spain, 17–22 October 2011. [Google Scholar]
- Cheshire, S.; Krochmal, M. Multicast DNS; RFC 6762; Internet Engineering Task Force: Fremont, CA, USA, 2013. [Google Scholar]
- Klauck, R.; Kirsche, M. Enhanced DNS message compression—Optimizing mDNS/DNS-SD for the use in 6LoWPANs. In Proceedings of the IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, USA, 18–22 March 2013; pp. 596–601. [Google Scholar] [CrossRef]
- Siljanovski, A.; Sehgal, A.; Schönwälder, J. Service discovery in resource constrained networks using multicast DNS. In Proceedings of the European Conference on Networks and Communications (EuCNC), Bologna, Italy, 23–26 June 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Bonjour. Available online: https://support.apple.com/bonjour (accessed on 8 December 2018).
- Lea, R. HyperCat: An IoT Interoperability Specification. 2013. Available online: http://eprints.lancs.ac.uk/id/eprint/69124 (accessed on 20 December 2018).
- AllJoyn Open Source Project. Available online: https://goo.gl/CiCM9U (accessed on 8 December 2018).
- Heredia, E.A. An Introduction to the DLNA Architecture: Network Technologies for Media Devices, 1st ed.; Wiley Publishing: Hoboken, NJ, USA, 2011. [Google Scholar]
- Goland, Y.Y.; Cai, T.; Leach, P.; Gu, Y.; Albright, S. Simple Service Discovery Protocol/1.0 Operating without an Arbiter; Internet-Draft draft-cai-ssdp-v1; Internet Engineering Task Force: Fremont, CA, USA, 1999. [Google Scholar]
- Physical Web. Available online: https://google.github.io/physical-web/ (accessed on 8 December 2018).
- Haugdahl, J.S. Inside NetBIOS; Architecture Technology Corp.: Minneapolis, MN, USA, 1990. [Google Scholar]
- Web Services Dynamic Discovery (WS-Discovery). Available online: https://goo.gl/bGJMmH (accessed on 8 December 2018).
- Davoli, L.; Veltri, L.; Ferrari, G.; Amadei, U. Internet of Things on Power Line Communications: An Experimental Performance Analysis. In Smart Grids and Their Communication Systems; Kabalci, E., Kabalci, Y., Eds.; Springer: Singapore, 2019; pp. 465–498. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Description | Unit |
|---|---|---|
| T-Join | Joining Time: time needed by the LEN to receive information about the DODAG from its parent | (ms) |
| EN-Join | Joining Energy: energy spent by the LEN and its parent during the joining phase | (mJ) |
| T-DAO-EBR | Time DAO-EBR: time interval between the generation instant of the DAO packet by the LEN and the creation instant of the route in the routing table of the BR | (ms) |
| EN-DAO-EBR | Energy DAO-EBR: overall energy spent by the network during the propagation of the DAO packet from the LEN to the BR | (mJ) |
| T-SCR-RES | Time SCR-RES: time needed for a RD/SD on the LEN originated by the BR | (s) |
| EN-SCR-RES | Energy SCR-RES: overall energy spent by the network during a RD/SD from the LEN to the BR | (mJ) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Davoli, L.; Antonini, M.; Ferrari, G. DiRPL: A RPL-Based Resource and Service Discovery Algorithm for 6LoWPANs. Appl. Sci. 2019, 9, 33. https://doi.org/10.3390/app9010033
Davoli L, Antonini M, Ferrari G. DiRPL: A RPL-Based Resource and Service Discovery Algorithm for 6LoWPANs. Applied Sciences. 2019; 9(1):33. https://doi.org/10.3390/app9010033
Chicago/Turabian StyleDavoli, Luca, Mattia Antonini, and Gianluigi Ferrari. 2019. "DiRPL: A RPL-Based Resource and Service Discovery Algorithm for 6LoWPANs" Applied Sciences 9, no. 1: 33. https://doi.org/10.3390/app9010033
APA StyleDavoli, L., Antonini, M., & Ferrari, G. (2019). DiRPL: A RPL-Based Resource and Service Discovery Algorithm for 6LoWPANs. Applied Sciences, 9(1), 33. https://doi.org/10.3390/app9010033