A Neural Network Based Sliding Mode Control for Tracking Performance with Parameters Variation of a 3-DOF Manipulator



Abstract
:Featured Application
Abstract
1. Introduction
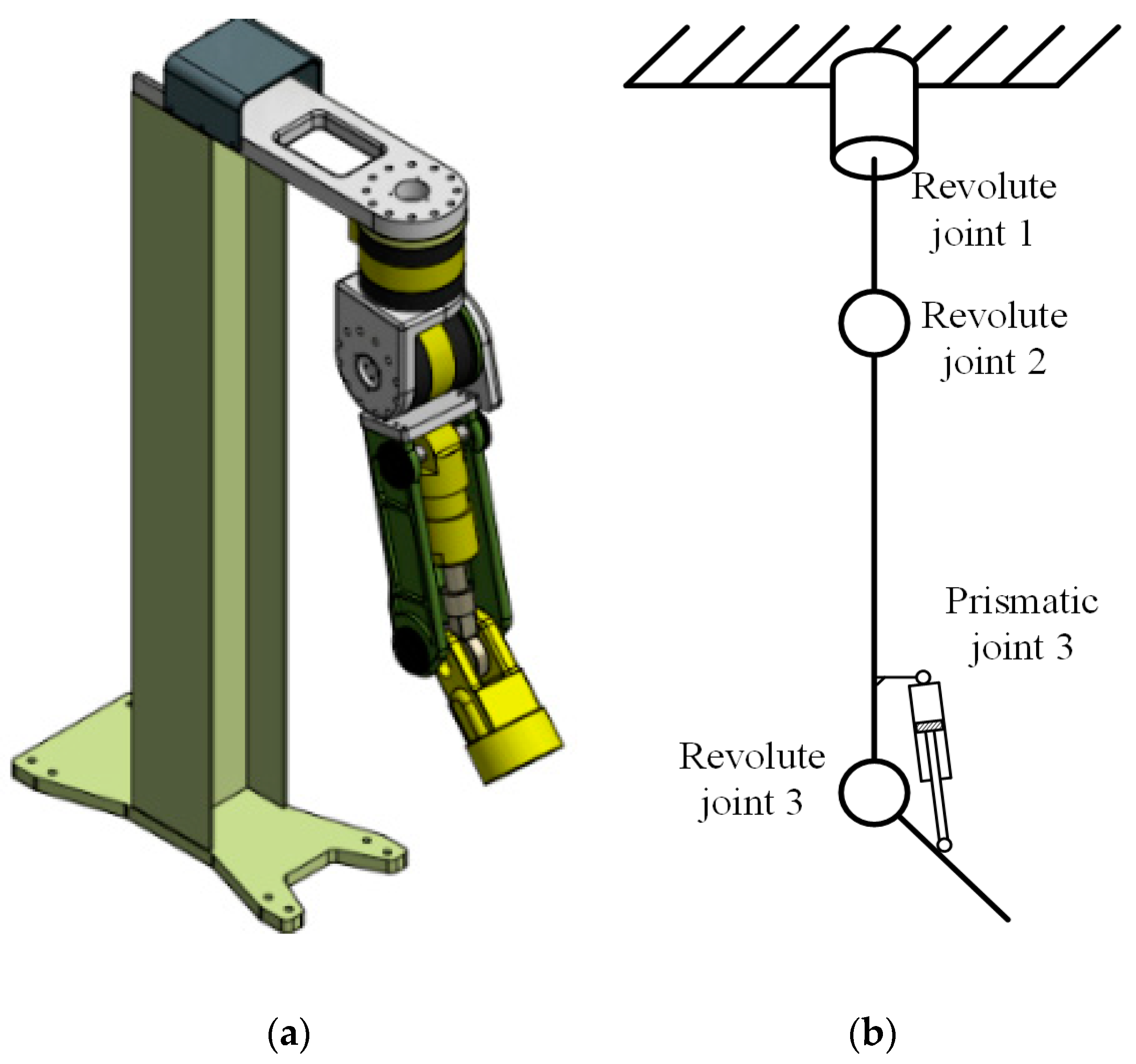
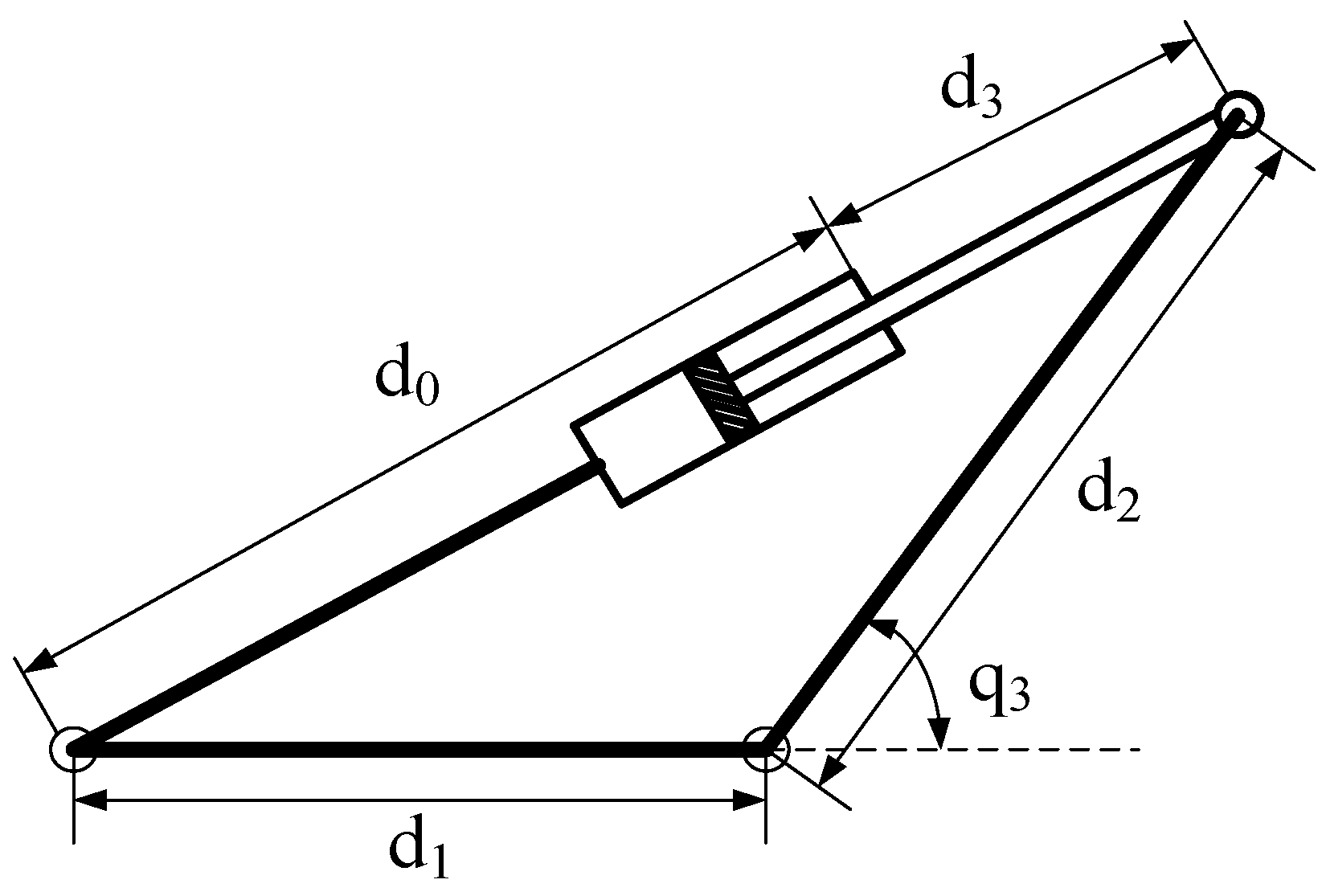
2. Manipulator Dynamics
3. Controller Design
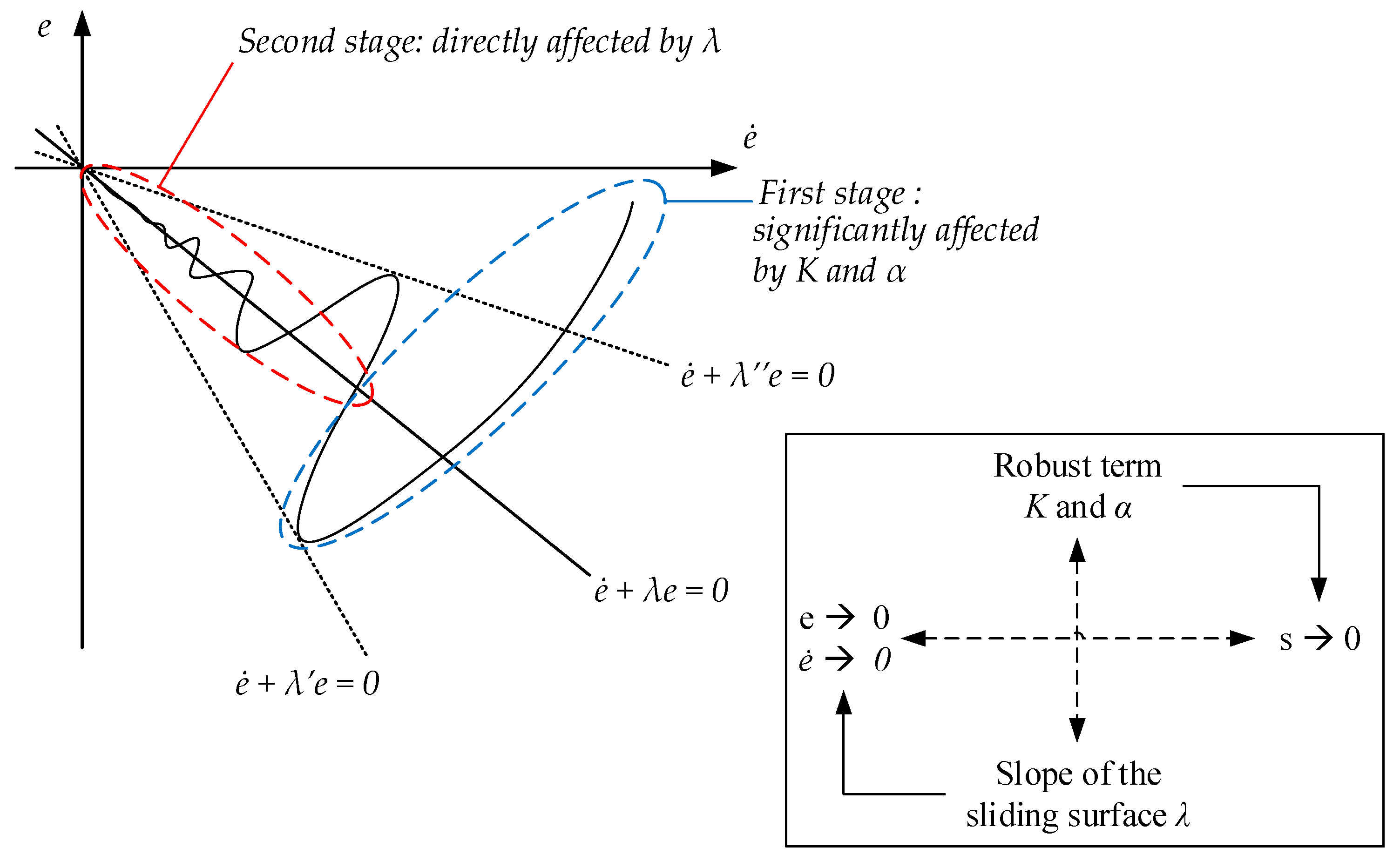
3.1. Sliding Mode Control
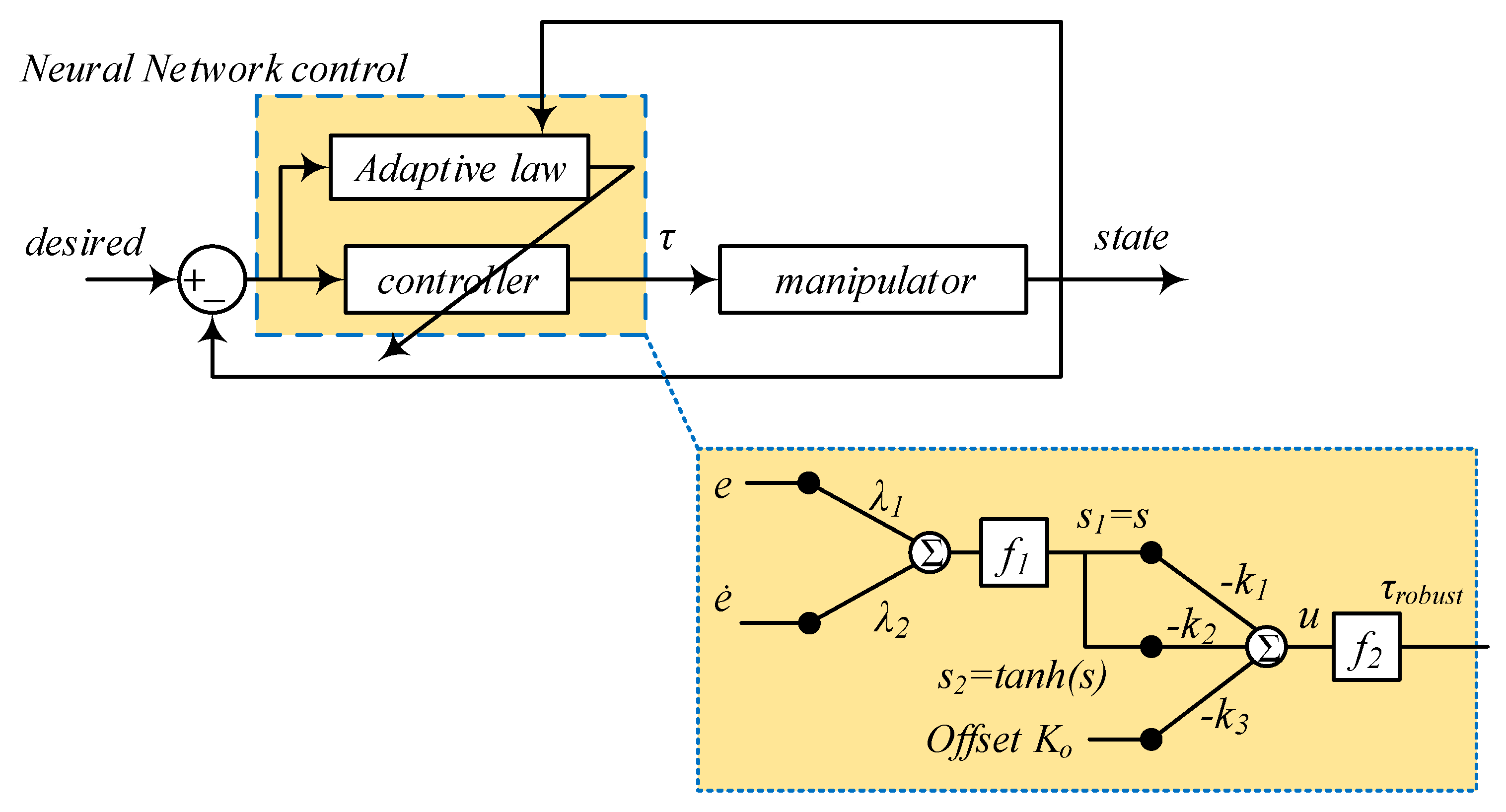
3.2. Neural Network Control
3.3. The Constraint of the Updating Law
4. Simulation
5. Experiment
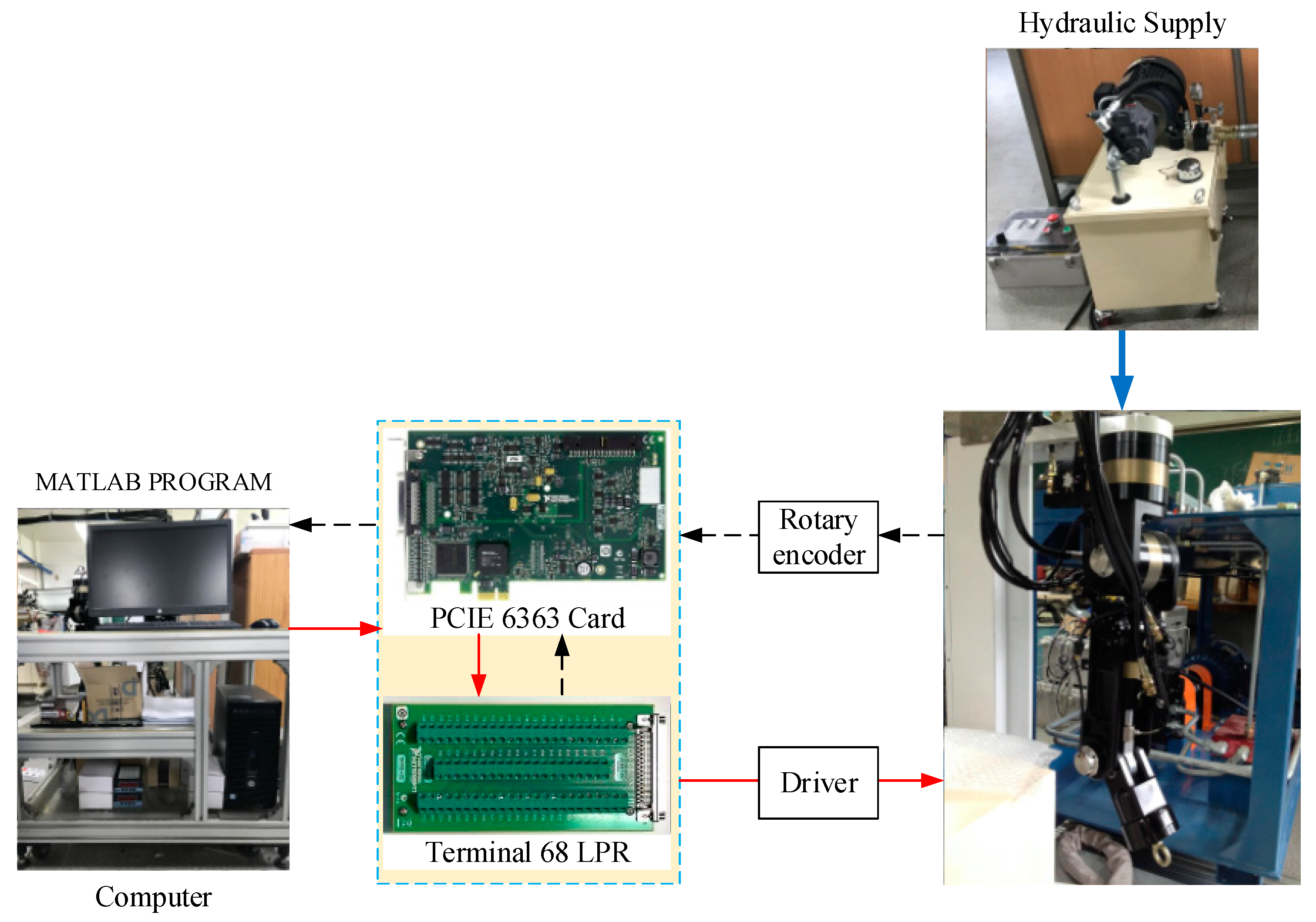
5.1. Experimental Setup
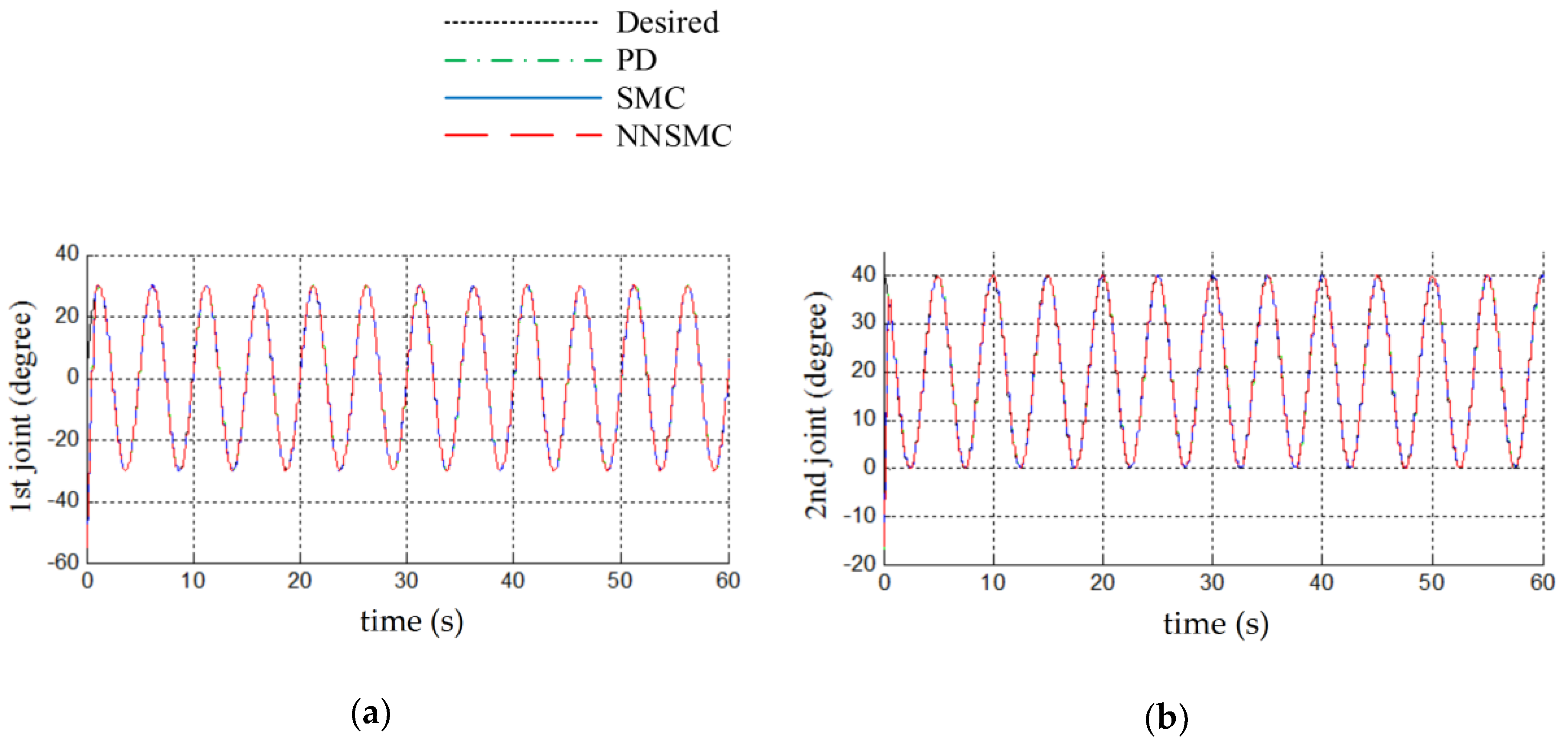
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- John, J.C. Introduction to Robotics Mechanics and Control, 3rd ed.; Addison-Wisley: Reading, MA, USA; Pearson Education Inc.: Upper Saddle River, NJ, USA, 1989. [Google Scholar]
- Yuxin, S.; Peter, C.M.; Chunhong, Z. Global Asymptotic Saturated PID Control for Robot Manipulators. IEEE Trans. Control Syst. Technol. 2010, 18, 1280–1288. [Google Scholar]
- Woosoon, Y.; Sahjendra, N.S. Feedback Linearization of Differential-Algebraic Systems and Force and Position Control of Manipulators. In Proceedings of the 1993 American Control Conference, San Francisco, CA, USA, 2–4 June 1993; pp. 2279–2283. [Google Scholar]
- Chaouki, A.; Darren, M.D.; Peter, D.; Mohammad, J. Survey of the robust control robots. IEEE Control Syst. Mag. 1991, 12, 24–30. [Google Scholar]
- Ishii, C.; Shen, T.; Tamura, K. Robust model-following control for a robot manipulator. IEEE Proc. Control Theory Appl. 1997, 144, 53–60. [Google Scholar] [CrossRef]
- Frank, L.L.; Aydin, Y.; Kai, L. Multilayer neural-net robot controller with guaranteed tracking performance. IEEE Trans. Neural Netw. 1996, 7, 388–399. [Google Scholar]
- Shuzhi, Z.G.; Christopher, J.H. Adaptive Neural Network Control of Robotic Manipulator; World Scientific Publishing Co., Inc.: River Edge, NJ, USA, 1998. [Google Scholar]
- Ha, T.W.; Jun, K.H.; Nguyen, M.T.; Han, S.M.; Shin, J.W.; Ahn, K.K. Position control of an Electro-Hydrostatic Rotary Actuator using adaptive PID control. J. Drive Control 2017, 14, 37–44. [Google Scholar]
- Rong, J.W.; Rajkumar, M. Design of Fuzzy-Neural-Network-Inherited Backstepping Control for Robot Manipulator Including Actuator Dynamics. IEEE Trans. Fuzzy Syst. 2014, 22, 709–722. [Google Scholar]
- Nikdel, N.; Badamchizadeh, M.A.; Azimirad, V.; Nazari, M.A. Adaptive backstepping control for an n-degree of freedom robotic manipulator based on combined state augmentation. Robot. Comput. Integr. Manuf. 2017, 44, 129–143. [Google Scholar] [CrossRef]
- Li, S.; Ahmad, G.; Xie, W.; Gao, Y. An Enhanced IBVS Controller of a 6DOF Manipulator Using Hybrid PDSMC Method. Int. J. Control Autom. Syst. 2018, 16, 844–855. [Google Scholar] [CrossRef]
- Shafiqul, I.; Xiaoping, P.L. Robust Sliding Mode Control for Robot Manipulators. IEEE Trans. Ind. Electron. 2011, 58, 2444–2453. [Google Scholar]
- Illias, E.M.; Carlos, R.G.; Dirk, L.; Bram, V. The Variable Boundary Layer Sliding Mode Control: A Safe and Performant Control for Compliant Joint Manipulators. IEEE Trans. Robot. Autom. Lett. 2017, 2, 187–192. [Google Scholar]
- Lee, H.S.; Won, S.J.; Ahn, K.K. The Numerical Modeling and Sliding Mode Control of a New Submersible Fish Cage. J. Drive Control 2017, 14, 18–24. [Google Scholar]
- Jaemin, B.; Jin, M.; Han, S.H. A New Adaptive Sliding-Mode Control Scheme for Application to Robot Manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar]
- Ahmed, F.A.; Elsayed, A.S.; Wael, M.E. Adaptive fuzzy sliding mode control using supervisory fuzzy control for 3 DOF planar robot manipulators. Appl. Soft Comput. 2011, 11, 4943–4953. [Google Scholar]
- He, J.; Luo, M.; Zhang, Q.; Zhao, J.; Xu, L. Adaptive Fuzzy Sliding Mode Controller with Nonlinear Observer for Redundant Manipulators Handling Varying External Force. J. Bionic Eng. 2016, 13, 600–611. [Google Scholar] [CrossRef]
- Do, H.T.; Hyung, G.P.; Kyoung, K.A. Application of an adaptive fuzzy sliding mode controller in velocity control of a secondary controlled hydrostatic transmission system. Mechatronics 2014, 24, 1157–1165. [Google Scholar] [CrossRef]
- Nguyen, S.D.; Choi, S.B.; Seo, T.I. Adaptive Fuzzy Sliding Control Enhanced by Compensation for Explicitly Unidentified Aspects. Int. J. Control Autom. Syst. 2017, 15, 2906–2920. [Google Scholar] [CrossRef]
- Do, H.T.; Dang, T.D.; Truong, H.V.A.; Ahn, K.K. Maximum Power Point Tracking and Output Power Control on Pressure Coupling Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2018, 65, 1316–1324. [Google Scholar] [CrossRef]
- Tu, D.C.T.; Kyounbg, K.A. Nonlinear PID control to improve the control performance of 2 axes pneumatic artificial muscle manipulator using neural network. Mechatronics 2006, 16, 577–587. [Google Scholar]
- Sun, T.; Pei, H.; Pan, Y.; Zhou, H.; Zhang, C. Neural network-based sliding mode adaptive control for robot manipulators. Neurocomputing 2011, 74, 2377–2384. [Google Scholar] [CrossRef]
- Tran, M.D.; Hee, J.K. Adaptive terminal sliding mode control of uncertain robotic manipulators based on local approximation of a dynamics system. Neurocomputing 2017, 228, 231–240. [Google Scholar] [CrossRef]
- Seul, J. Stability Analysis of Reference Compensation Technique for Controlling Robot Manipulators by Neural Network. Int. J. Control Autom. Syst. 2017, 15, 952–958. [Google Scholar]
- Seul, J. Improvement of Tracking Control of a Sliding Mode Controller for Robot Manipulators by a Neural Network. Int. J. Control, Autom. Syst. 2018, 16, 937–943. [Google Scholar]
- Vo, A.T.; Kang, H.-J. An Adaptive Neural Non-Singular Fast-Terminal Sliding-Mode Control for Industrial Robotic Manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef]
- To, X.D.; Ahn, K.K. Radial Basis Function Neural Network based Adaptive Fast Nonsingular Terminal Sliding Mode Controller for Piezo Positioning Stage. Int. J. Control Autom. Syst. 2017, 15, 2892–2905. [Google Scholar]
- Vu, T.Y.; Wang, Y.N.; Pham, V.C.; Nguyen, X.Q.; Vu, H.T. Robust Adaptive Sliding Mode Control for Industrial Robot Manipulator Using Fuzzy Wavelet Neural Networks. Int. J. Control Autom. Syst. 2017, 15, 2930–2941. [Google Scholar]
- Ahn, K.K.; Huynh, T.C.N. Intelligent switching control of a pneumatic muscle robot arm using learning vector quantization neural network. Mechatronics 2007, 17, 255–262. [Google Scholar] [CrossRef]
- Saeed, P.; Sajad, B.; Ali, J. Performance Analysis of a Neuro-PID Controller Applied to a Robot Manipulator. Int. J. Adv. Robot. Syst. 2012, 9, 163. [Google Scholar]
- Le, T.D.; Kang, H.-J.; Suh, Y.-S.; Ro, Y.-S. An online self-gain tuning method using neural networks for nonlinear PD computed torque controller of a 2-dof parallel manipulator. Neurocomputing 2013, 116, 53–61. [Google Scholar] [CrossRef]
- Yuri, S.; Christopher, E.; Leonid, F.; Arie, L. Sliding Mode Control and Observation, Control Engineering; Springer: New York, NY, USA, 2014. [Google Scholar]
- Wilfrid, P. Sliding Mode Control in Engineering; Marcel Dekker, Inc.: New York, NY, USA, 2002. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Mass of link | mi (i = 1,2,3) = 5 | kg |
| Length of link 1 | l1 = 0.1 | m |
| Length of link 2 | l2 = 0.5 | m |
| Length of link 3 | l3 = 0.2 | m |
| d0 = 0.2453 | m | |
| d1 = 0.2471 | m | |
| d2 = 0.036 | m |
| Controller | Parameter | Value |
|---|---|---|
| PD 1 control | Kp | diag (100, 50, 50) |
| Kd | diag (10, 10, 10) | |
| SMC 2 | λ | diag (10, 10, 20) |
| K | diag (12.5, 15, 12.5) | |
| α | diag (0.005, 0.005, 0.005) | |
| NNSMC 3 | λ1 | diag (10, 10, 20) |
| λ2 | diag (1, 1, 1) | |
| K | diag (12.5, 15, 12.5) | |
| α | diag (0.005, 0.005, 0.005) | |
| Ko | diag (0.001, 0.001, 0.001) | |
| Disturbance | f1 | diag (0.002, 0.02, 0.02) |
| f2 | diag (0.002, 0.02, 0.02) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Truong, H.-V.-A.; Tran, D.-T.; Ahn, K.K. A Neural Network Based Sliding Mode Control for Tracking Performance with Parameters Variation of a 3-DOF Manipulator. Appl. Sci. 2019, 9, 2023. https://doi.org/10.3390/app9102023
Truong H-V-A, Tran D-T, Ahn KK. A Neural Network Based Sliding Mode Control for Tracking Performance with Parameters Variation of a 3-DOF Manipulator. Applied Sciences. 2019; 9(10):2023. https://doi.org/10.3390/app9102023
Chicago/Turabian StyleTruong, Hoai-Vu-Anh, Duc-Thien Tran, and Kyoung Kwan Ahn. 2019. "A Neural Network Based Sliding Mode Control for Tracking Performance with Parameters Variation of a 3-DOF Manipulator" Applied Sciences 9, no. 10: 2023. https://doi.org/10.3390/app9102023
APA StyleTruong, H. -V. -A., Tran, D. -T., & Ahn, K. K. (2019). A Neural Network Based Sliding Mode Control for Tracking Performance with Parameters Variation of a 3-DOF Manipulator. Applied Sciences, 9(10), 2023. https://doi.org/10.3390/app9102023