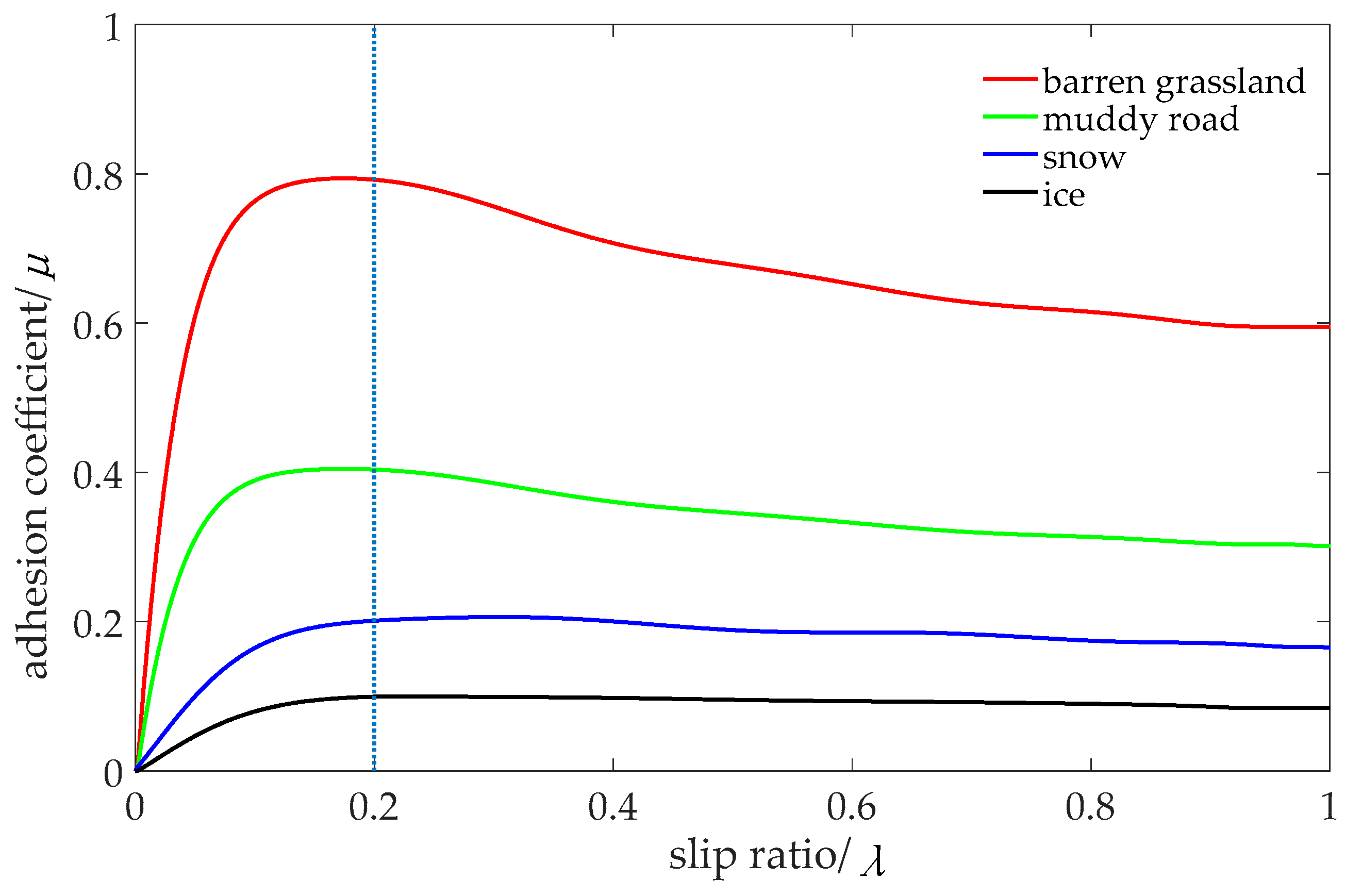
The first thing that should be clarified is when the emergency braking control strategy needs to be triggered. Without any doubt, when the brake pedal travel exceeds a certain value, for example 95%, as shown in Equation (12), this means the driver wants the vehicle to stop as soon as possible. However, when driving on low adhesion grounds, it is impossible for the vehicle to achieve a deceleration exceeding the ability that the track-ground condition can provide. Thus, when the slip ratio goes higher than a threshold, the emergency braking control strategy needs to be triggered. It is shown in
Figure 3 that a
curve rises fast with the increase of the slip ratio from zero and turns to a flat growth as
approaches 0.15, then when the slip ration goes over 0.2, the adhesion coefficient starts to fall with the growth of
, although the falling speed is related to a certain value of
and what the track-ground condition is. Hence, the threshold of the slip ratio can be set as 0.15.
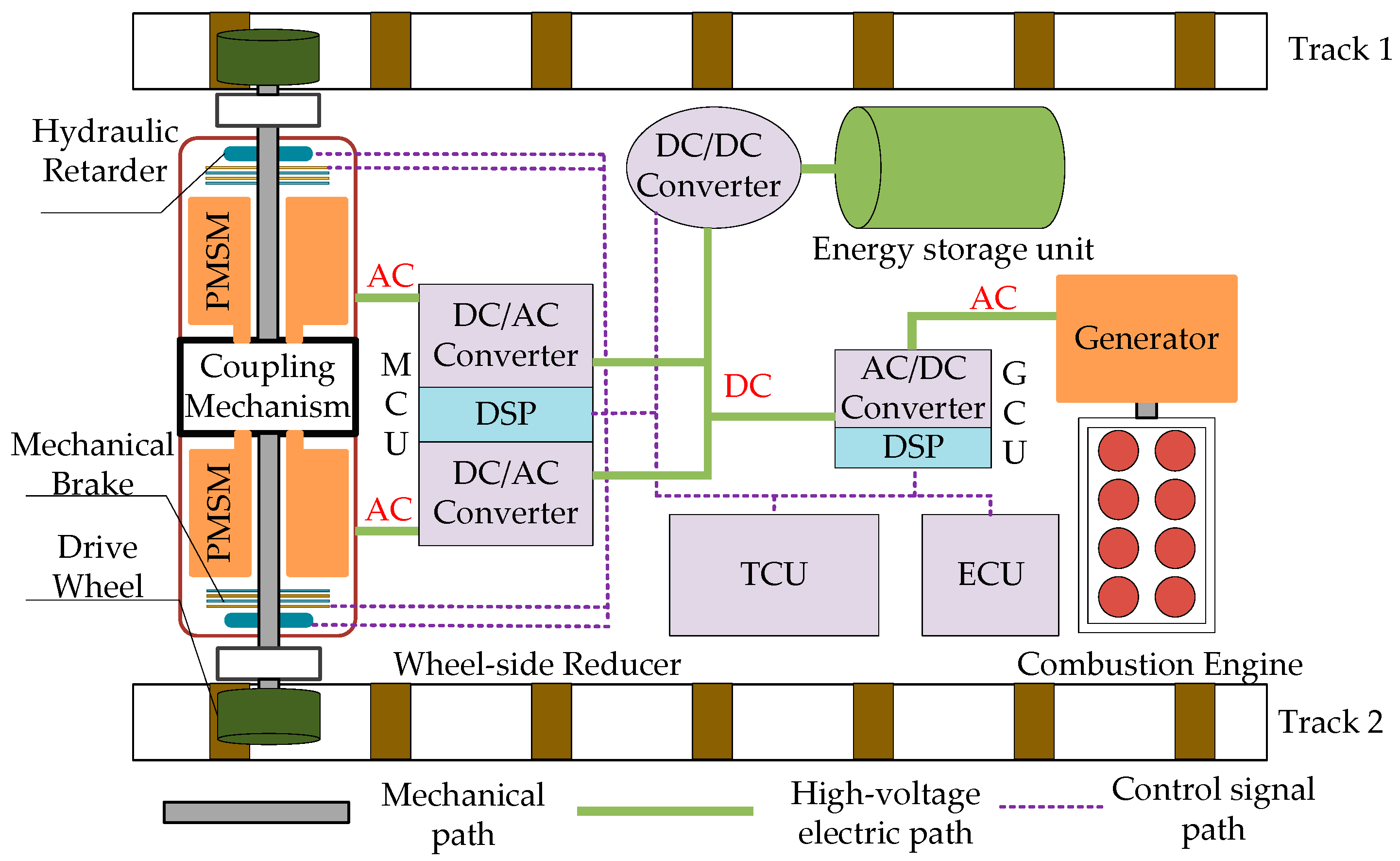
The emergency braking control strategy proposed in this article consists of a sliding mode slip controller and a rule-based braking force allocation method. When the emergency braking control strategy is triggered, the sliding mode slip controller calculates the total braking torque demanded converted to the drive wheel according to the current vehicle status, and then, the braking torque allocation method divides the total demanded braking torque into three parts separately for the mechanical brake, the hydraulic retarder, and the PMSM according to the rules and vehicle status.
3.1. Sliding Mode Slip Ratio Controller
According to Equation (6), the derivation of the slip ratio with respect to time is:
Substitute
as a function of
from Equation (6) and
defined in Equation (8) into Equation (13); we can get that:
where:
Here,
is a function of vehicle deceleration
, drive wheel angular velocity
, and track-ground resultant force
. Since
and
are directly measured by the accelerometer and encoder, the errors of them are relatively small, so the error of estimating
is mainly the result of the error estimating
. Assuming that the estimation of
is bounded, then the error of
can be expressed as:
and its boundary can be represented as:
where
is the maximum error of estimating
.
A zero-order sliding surface can be chosen to track the demanded slip ratio [
8,
13,
29]; the sliding surface and its derivation with respect to time are:
Although the
curves vary widely according to different track-ground conditions, it is fortunate that the adhesion coefficient always achieves its largest value when the slip ratio nears the point of 0.2, as shown in
Figure 3, so the demanded slip ratio can be set as 0.2 for convenience, no matter at what track-ground conditions. Thus, the derivation of the sliding surface equals that of the slip ratio.
In order to converge as quickly as possible when
s is large and reduce chattering when
s is small, a sliding mode robust control method using the exponential approaching law is suitable for a plant with bounded disturbance [
38]. Thus, regarding the error of estimating
as a disturbance, the derivation of the sliding surface can be rewritten as:
where
sign(ss) is a sign function of
ss,
is suggested to be designed relatively large to realize a high approaching speed, and
is suggested to be designed relatively small to reduce the chattering near the sliding surface. According to Equations (15), (17), and (19), the total demanded braking torque converted to the drive wheel can be derived as (detailed in
Appendix C):
3.2. Rule-Based Braking Torque Allocating Method
There are three independent braking actuators for each half-shaft, and how to allocate the demanded braking torque derived in Equation (20) to them is the key to better follow the change of it and get a better braking performance.
These three braking actuators have their own advantages and drawbacks in different aspects. The mechanical brake can offer a large amount of braking torque, but its dynamic response is quite poor. The hydraulic retarder has a better response than the mechanical brake and can provide a stable braking torque in a rather high revolution speed, but its braking torque is nonadjustable at a certain revolution speed; what is more, its braking torque declines dramatically with the reduction of speed when the half-shaft rotates under a certain speed. As for the PMSM, its torque response is the best among these actuators and even can provide a positive torque in the braking process, which can help to improve the system response. However, according to its model, the maximum torque of PMSM is related to its revolution speed, so the maximum motor torque declines when exceeding the motor’s rated speed, even though the rated torque of it is already much smaller than the mechanical brake can provide; what is more, the accuracy of its torque control and the efficiency of the motor drive system also become worse when the revolution speed of the half-shaft is too low.
Therefore, several basic rules can be set according to the above characteristics of these braking actuators. Firstly, the total demanded braking torque can be divided into a steady part that changes less in the braking process and a dynamic part that is associated with the change of ss. Secondly, the steady part is provided by the mechanical brake and the hydraulic retarder. If the steady part of demanded torque is larger than the maximum torque of the hydraulic retarder at the current speed, it will be started up and generate torque; otherwise, it will be shut down. The difference of the steady part of demanded torque and the hydraulic retarder torque will be compensated by the mechanical brake. Thirdly, the dynamic part is provided by the PMSM. Finally, the hydraulic retarder exits when the speed of the vehicle is less than 12 km/h, and the PMSM exits under the point of 5 km/h to suit its own features.
The braking torque allocation method is shown in
Figure 5.
Substituting the definition of the sliding surface into Equation (20), we can get that:
In this equation, we can find that although
,
, and
are functions of slip ratio
, they change slowly when the slip ratio changes around the point
; however, the value of the last two items in this equation changes greatly with the fluctuation of
ss, and the value may be positive, which can only be provided by the PMSM. Thus, the steady and dynamic part of total braking torque can be written as follows:
However, the dynamic part of total demanded braking torque
may exceed the ability of the PMSM greatly when the deviation of the real slip ratio
and demanded slip ratio
is large, so it is better to use the mechanical brake compensating the difference of them to improve the control effect. Thus, the demanded torque for the mechanical brake and PMSM converted to the drive wheel can be written as:
where
is the estimated hydraulic retarder torque converted to the drive wheel and
is the compensating coefficient to compensate the difference of demanded dynamic braking torque and PMSM torque. The value of
can vary from 0–1 according to the response characteristics of the mechanical brake, the hydraulic retarder, the PMSM, and the drive system to achieve a better braking performance. It is usually set with a relatively small value to prevent large overshoot of
due to the poor dynamic response of the mechanical brake.
To reduce chattering, the symbolic function
can be replaced by a saturation function
; thus,
can be rewritten as:
where the saturation function
is defined as:
where
is a positive real number.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










