Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity

Abstract
:1. Introduction
2. Hammerstein Model for DEAP Actuator
2.1. MPI Model
2.2. ARX Model
2.3. Parameters Identification
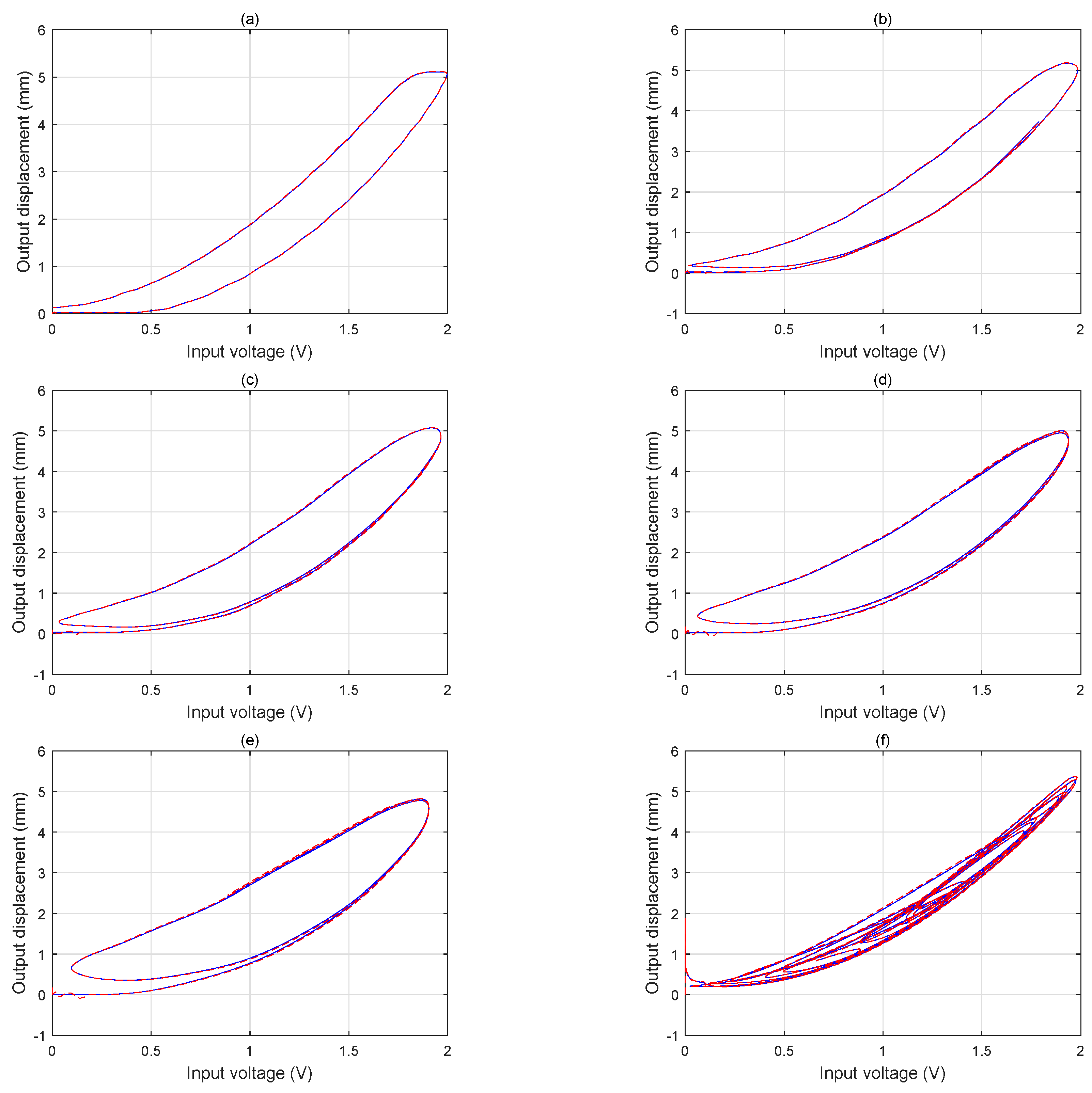
2.4. Model Validation
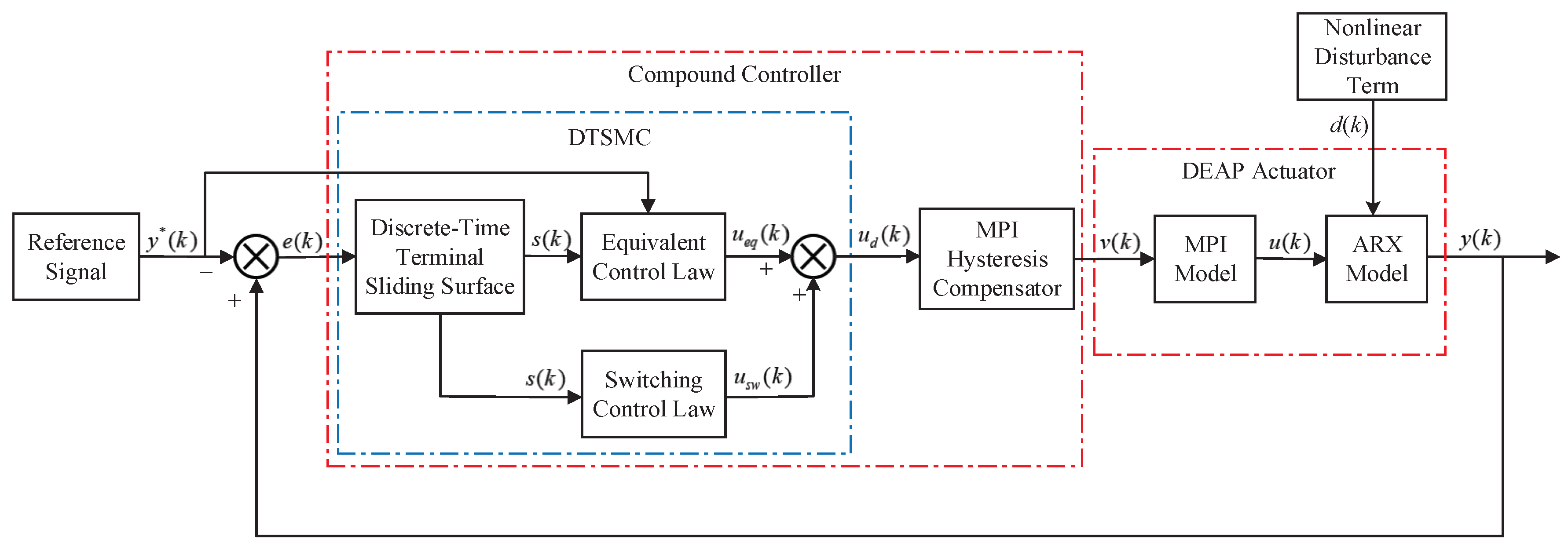
3. Compound Controller Design
3.1. Design of the Novel DTSMC
3.2. Stability Analysis
4. Experimental Results and Discussion
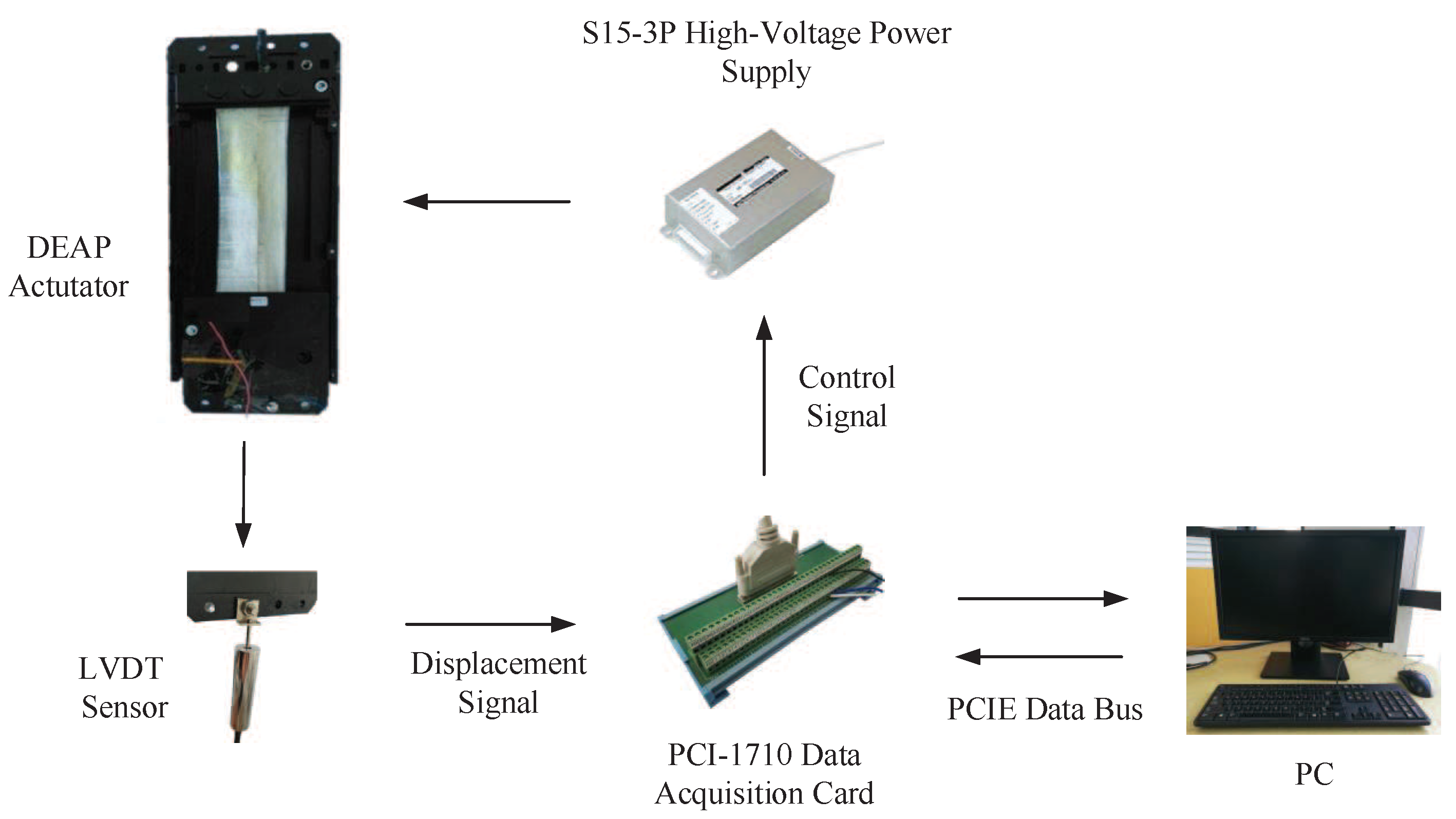
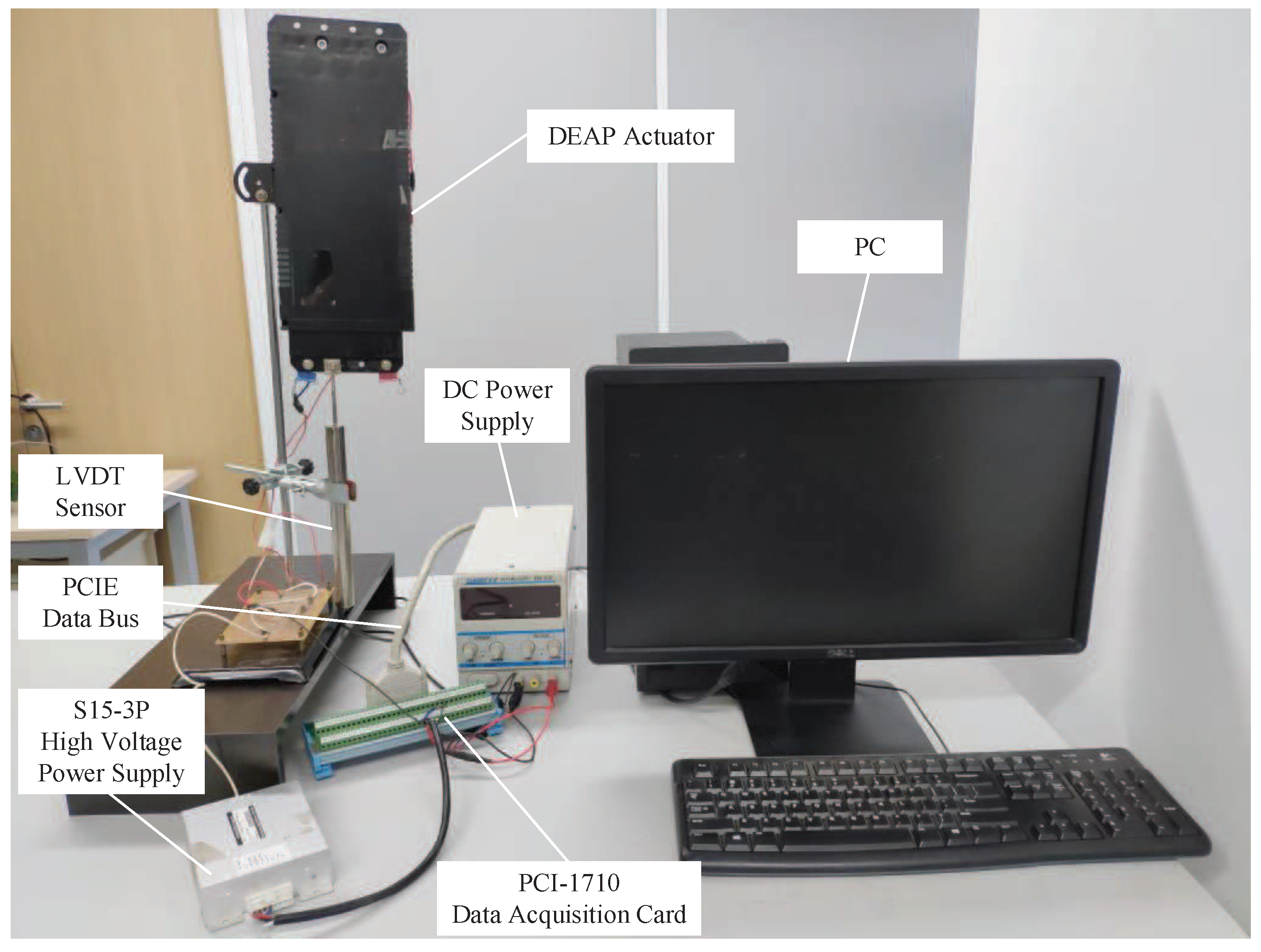
4.1. Experimental Setup
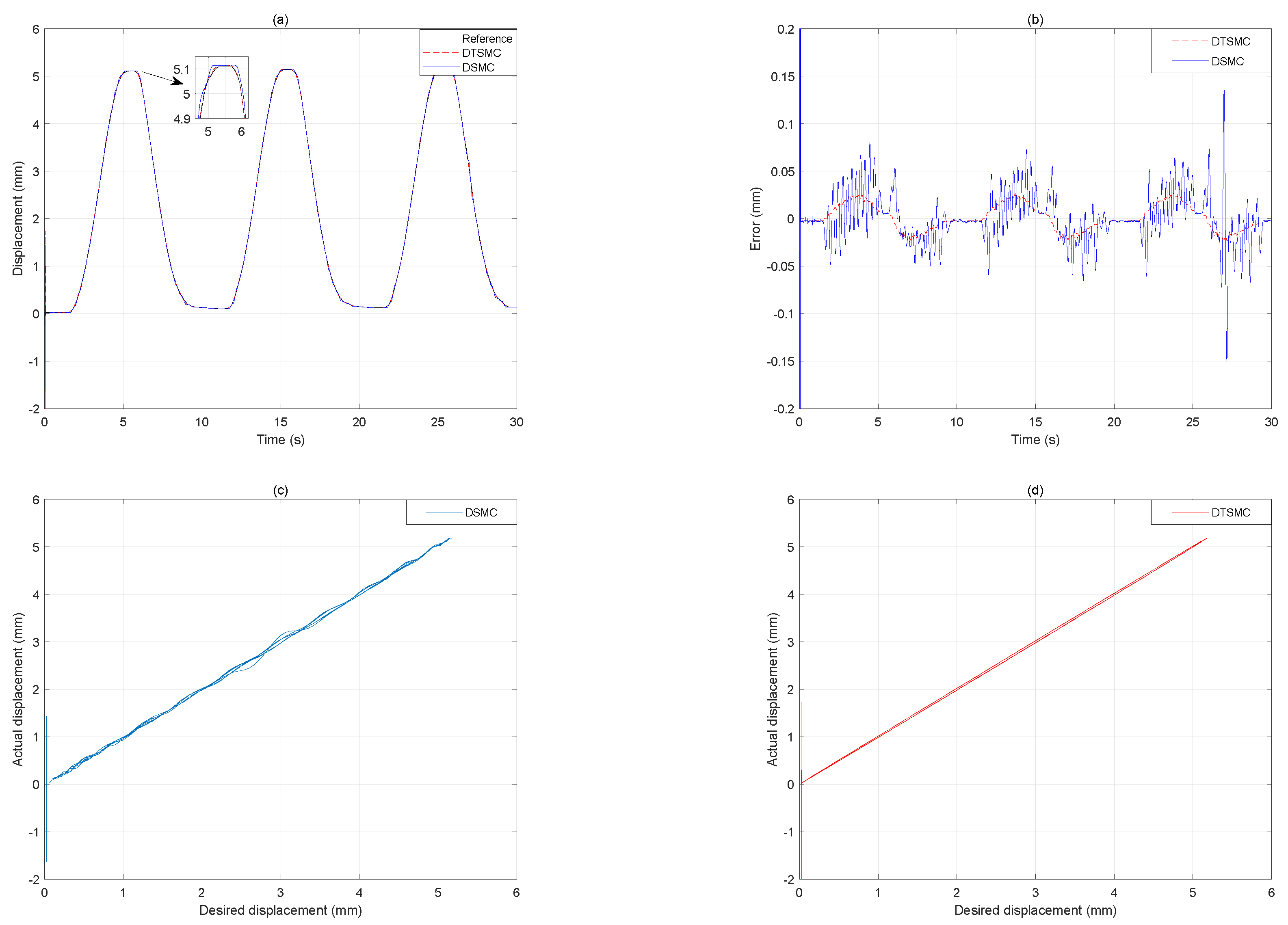
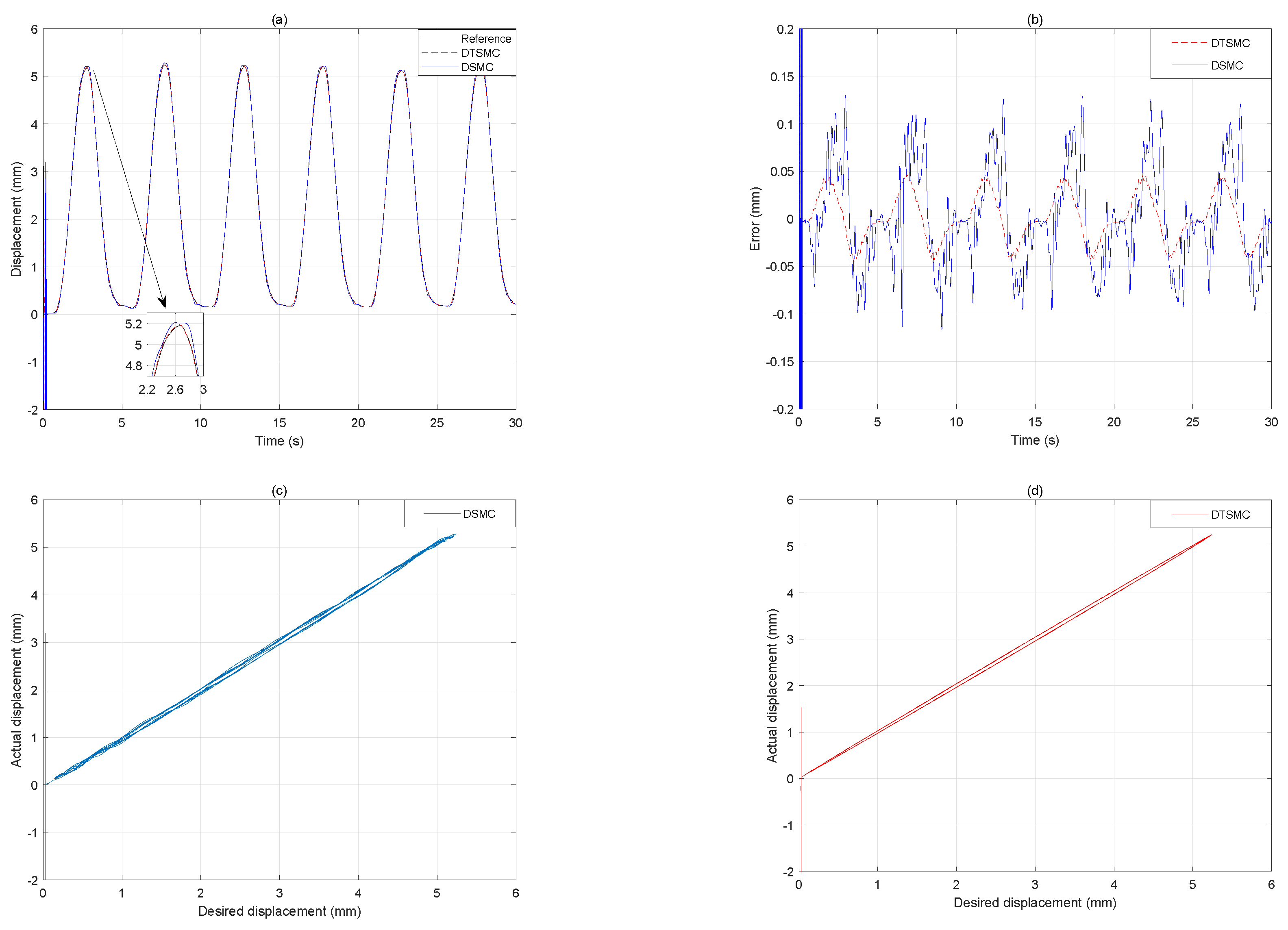
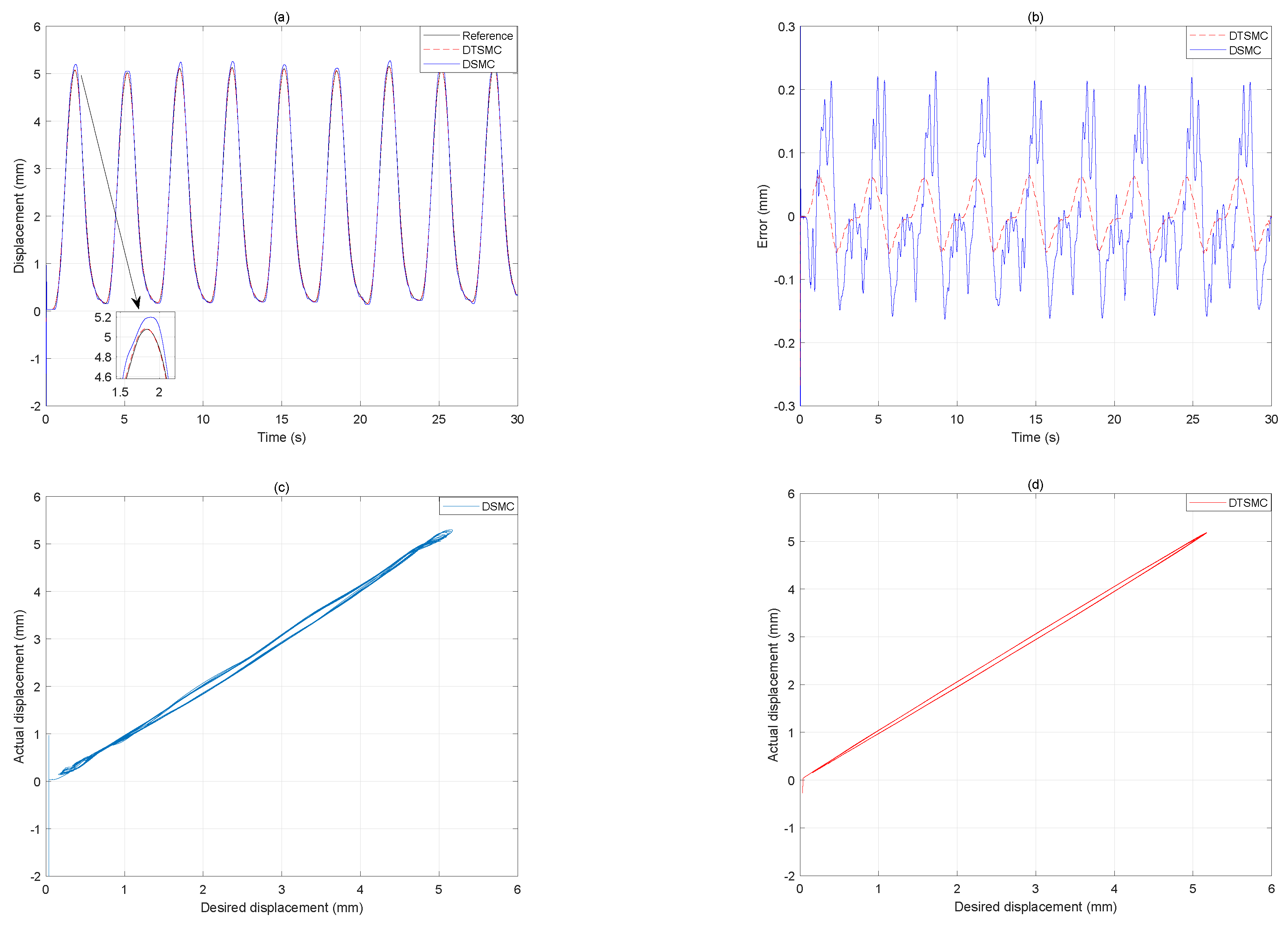
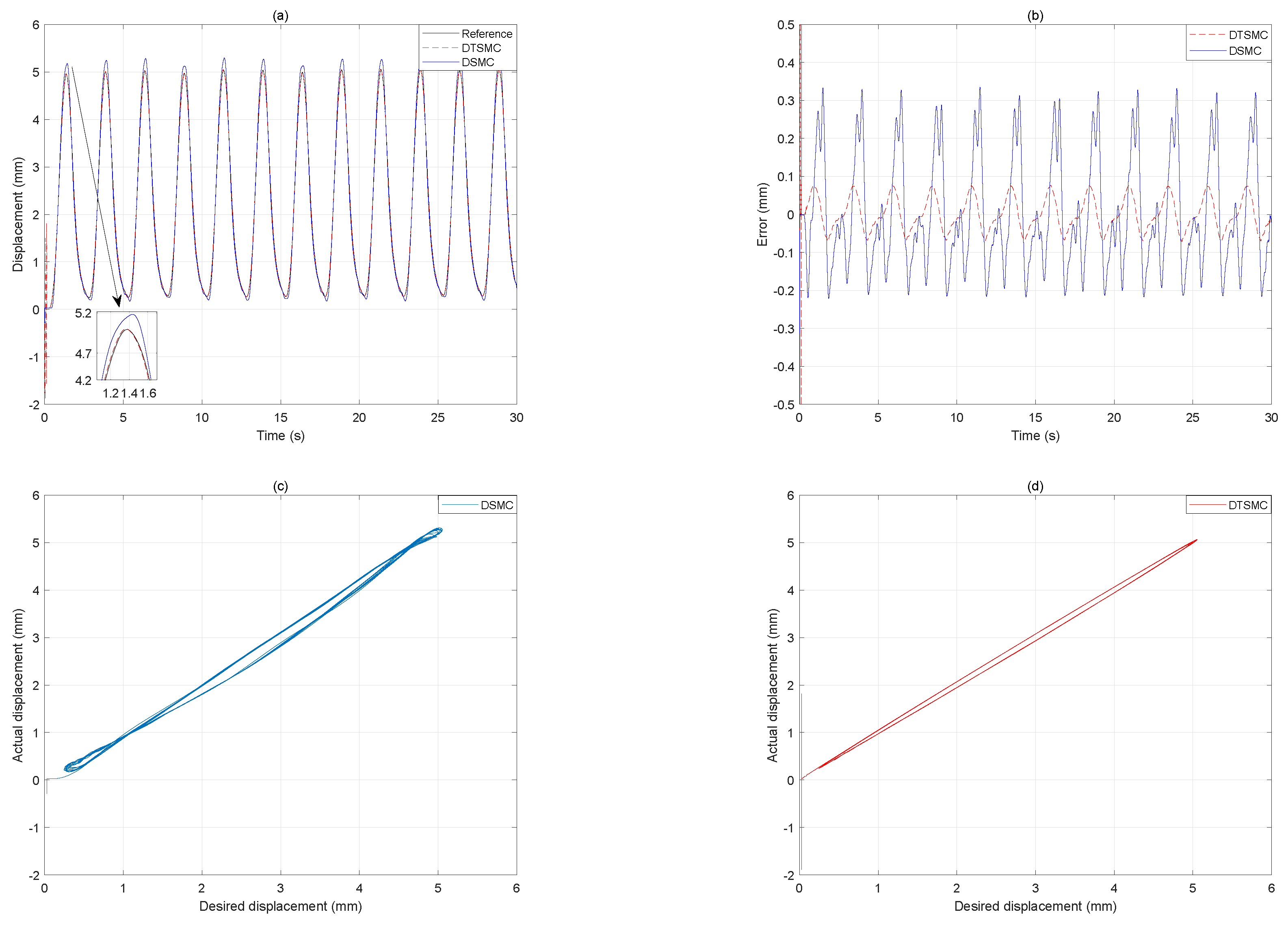
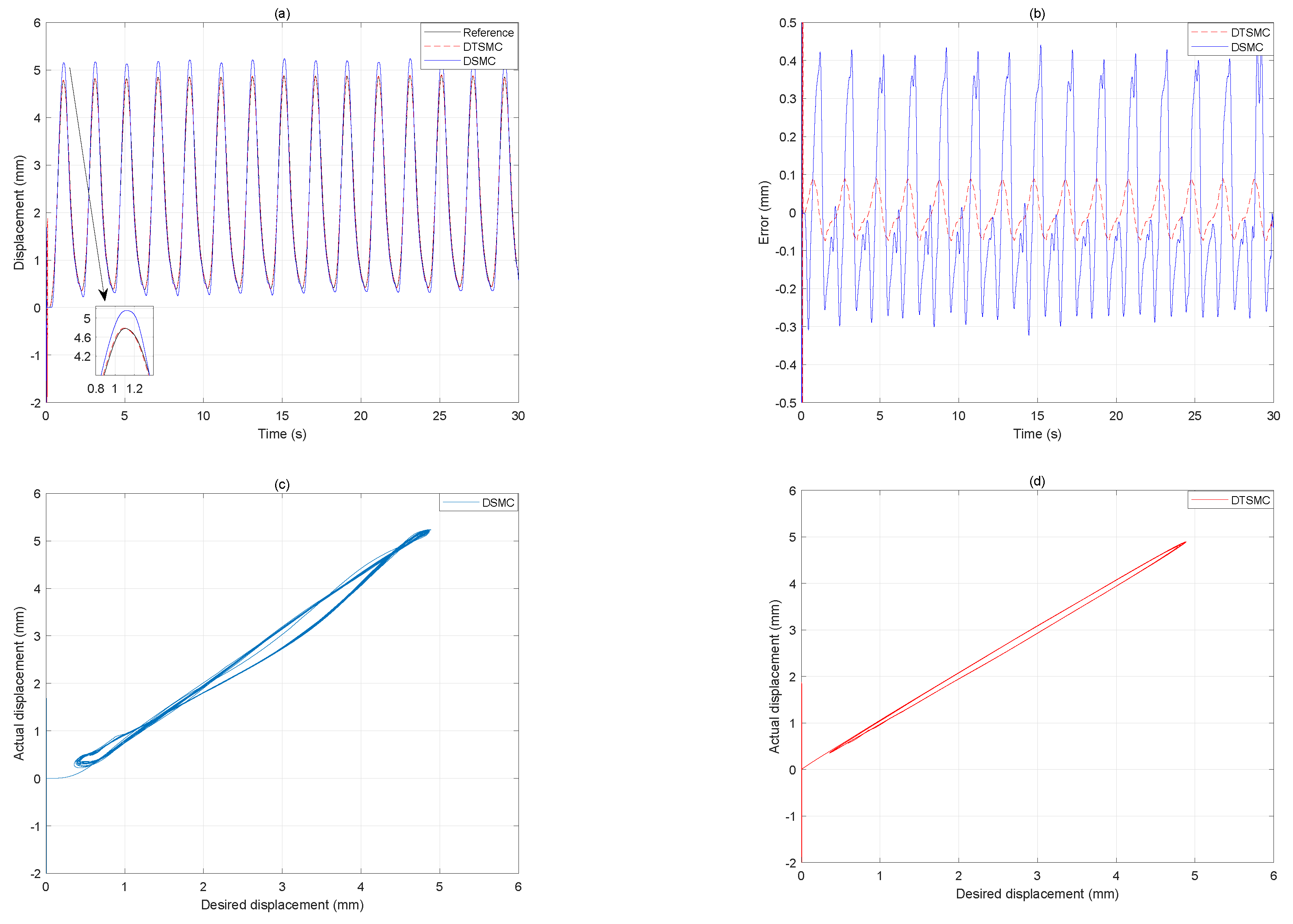
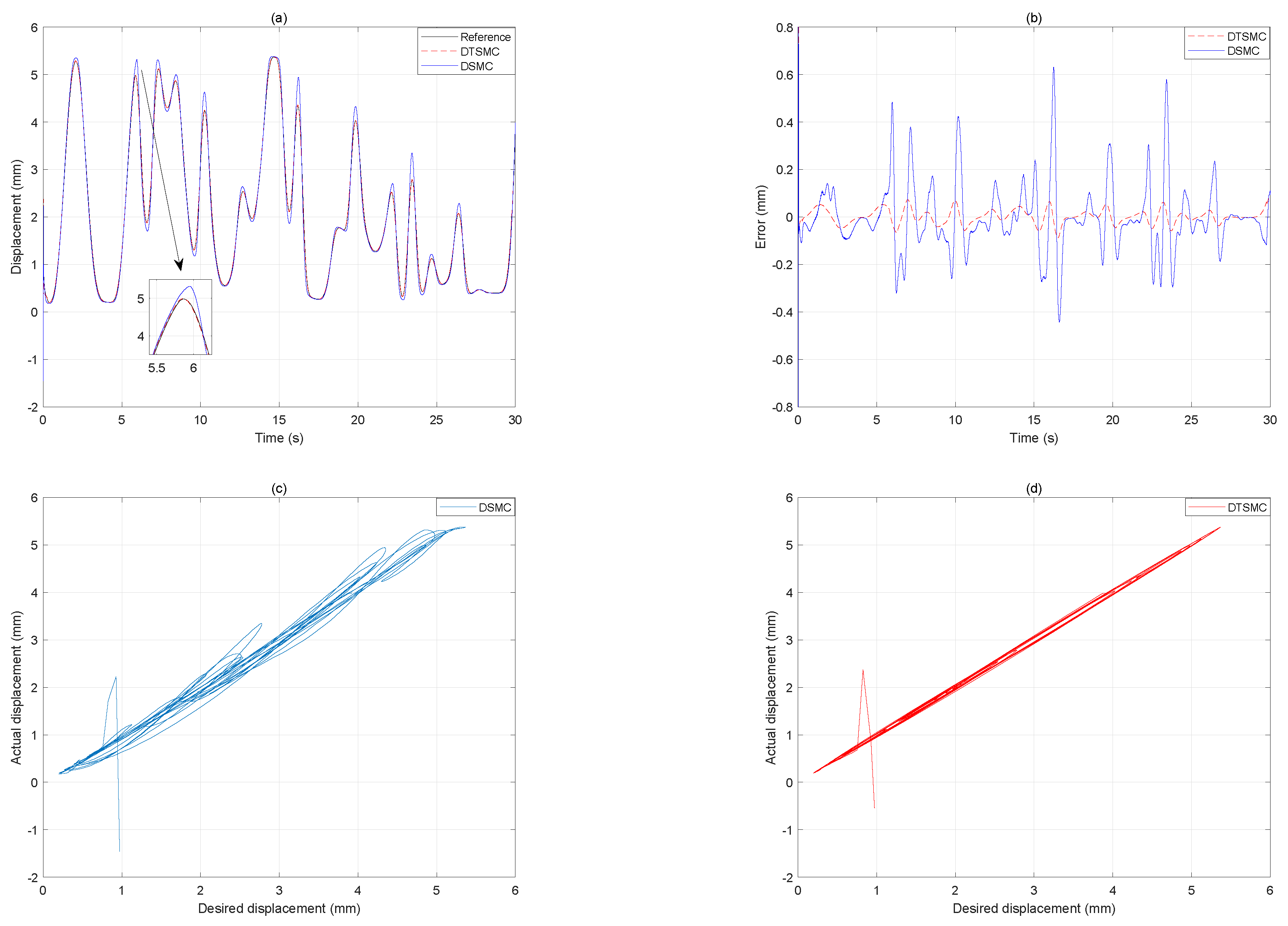
4.2. Experimental Results
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Benslimane, M.Y.; Kiil, H.E.; Tryson, M.J. Dielectric electro-active polymer push actuators: Performance and challenges. Polym. Int. 2010, 59, 415–421. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, J.; Zhu, L.M.; Zhu, X. A survey on dielectric elastomer actuators for soft robots. Bioinspir. Biomim. 2017, 12, 011003. [Google Scholar] [CrossRef] [PubMed]
- Iskandarani, Y.; Karimi, H.R. Dynamic characterization for the dielectric electroactive polymer fundamental sheet. Int. J. Adv. Manuf. Technol. 2013, 66, 1457–1466. [Google Scholar] [CrossRef]
- Kovacs, G.; Lochmatter, P.; Wissler, M. An arm wrestling robot driven by dielectric elastomer actuators. Smart Mater. Struct. 2007, 16, S306. [Google Scholar] [CrossRef]
- Shintake, J.; Rosset, S.; Schubert, B.E.; Floreano, D.; Shea, H.R. A foldable antagonistic actuator. IEEE/ASME Trans. Mechatron. 2015, 20, 1997–2008. [Google Scholar] [CrossRef]
- Godaba, H.; Li, J.; Wang, Y.; Zhu, J. A soft jellyfish robot driven by a dielectric elastomer actuator. IEEE Robot. Autom. Lett. 2016, 1, 624–631. [Google Scholar] [CrossRef]
- Truong, B.N.M.; Ahn, K.K. Inverse modeling and control of a dielectric electro-active polymer smart actuator. Sens. Actuators A Phys. 2015, 229, 118–127. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, X.; Li, Y. Giant magnetostrictive actuator nonlinear dynamic Jiles–Atherton model. Sens. Actuators A Phys. 2016, 250, 7–14. [Google Scholar] [CrossRef]
- Zou, J.; Gu, G. Modeling the viscoelastic hysteresis of dielectric elastomer actuators with a modified rate-dependent prandtl–ishlinskii model. Polymers 2018, 10, 525. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Aljanaideh, O. Further results on open-loop compensation of rate-dependent hysteresis in a magnetostrictive actuator with the Prandtl-Ishlinskii model. Mech. Syst. Signal Process. 2018, 104, 835–850. [Google Scholar] [CrossRef]
- Wang, H.; Song, G. Innovative NARX recurrent neural network model for ultra-thin shape memory alloy wire. Neurocomputing 2014, 134, 289–295. [Google Scholar] [CrossRef]
- Truong, B.N.M.; Ahn, K.K. Modeling, control and experimental investigation of time-average flow rate of a DEAP actuator based diaphragm pump. Int. J. Precis. Eng. Manuf. 2017, 18, 1119–1129. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. Modeling, identification, and control of a dielectric electro-active polymer positioning system. IEEE Trans. Control Syst. Technol. 2015, 23, 632–643. [Google Scholar] [CrossRef]
- Jones, R.W.; Sarban, R. Inverse grey-box model-based control of a dielectric elastomer actuator. Smart Mater. Struct. 2012, 21, 075019. [Google Scholar] [CrossRef]
- Hoffstadt, T.; Maas, J. Adaptive sliding-mode position control for dielectric elastomer actuators. IEEE/ASME Trans. Mechatron. 2017, 22, 2241–2251. [Google Scholar] [CrossRef]
- Qian, J.; Ji, C.; Pan, N.; Wu, J. Improved sliding mode control for permanent magnet synchronous motor speed regulation system. Appl. Sci. 2018, 8, 2491. [Google Scholar] [CrossRef]
- Zhihong, M.; Yu, X.H. Terminal sliding mode control of MIMO linear systems. IEEE Conf. Decis. Control 1996, 4, 4619–4624. [Google Scholar]
- Vo, A.T.; Kang, H.J. An adaptive neural non-singular fast-terminal sliding-mode control for industrial robotic manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef]
- Wang, G.; Xu, Q. Adaptive terminal sliding mode control for motion tracking of a micropositioning system. Asian J. Control 2018, 20, 1241–1252. [Google Scholar] [CrossRef]
- Dinh, T.X.; Ahn, K.K. Adaptive-gain fast nonsingular terminal sliding mode for position control of a piezo positioning stage. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 994–1014. [Google Scholar] [CrossRef]
- Furuta, K. Sliding mode control of a discrete system. Syst. Control Lett. 1990, 14, 145–152. [Google Scholar] [CrossRef]
- Chakrabarty, S.; Bandyopadhyay, B. A generalized reaching law for discrete time sliding mode control. Automatica 2015, 52, 83–86. [Google Scholar] [CrossRef]
- Nguyen, M.L.; Chen, X.; Yang, F. Discrete-time quasi-sliding-mode control with prescribed performance function and its application to piezo-actuated positioning systems. IEEE Trans. Ind. Electron. 2018, 65, 942–950. [Google Scholar] [CrossRef]
- Huber, O.; Acary, V.; Brogliato, B. Lyapunov stability and performance analysis of the implicit discrete sliding mode control. IEEE Trans. Autom. Control 2016, 61, 3016–3030. [Google Scholar] [CrossRef]
- Ma, H.; Li, Y.; Xiong, Z. Discrete-Time Sliding-Mode control with enhanced power reaching law. IEEE Trans. Ind. Electron. 2019, 66, 4629–4638. [Google Scholar] [CrossRef]
- Xu, Q. Digital integral terminal sliding mode predictive control of piezoelectric-driven motion system. IEEE Trans. Ind. Electron. 2016, 63, 3976–3984. [Google Scholar] [CrossRef]
- Xu, Q.; Cao, Z. Piezoelectric positioning control with output-based discrete-time terminal sliding mode control. IET Control Theory Appl. 2017, 11, 694–702. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Quart. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D.W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- Krejci, P.; Kuhnen, K. Inverse control of systems with hysteresis and creep. IEE Proc.-Control Theory Appl. 2001, 148, 185–192. [Google Scholar] [CrossRef] [Green Version]
- Kuhnen, K. Modeling, identification and compensation of complex hysteretic nonlinearities: A modified Prandtl-Ishlinskii approach. Eur. J. Control 2003, 9, 407–418. [Google Scholar] [CrossRef]
- Abidi, K.; Jian-Xin, X. A discrete-time integral sliding mode control approach for output tracking with state estimation. IFAC Proc. Vol. 2008, 41, 14199–14204. [Google Scholar] [CrossRef]
- Su, W.C.; Drakunov, S.V.; Ozguner, U. An O (T2) boundary layer in sliding mode for sampled-data systems. IEEE Trans. Autom. Control 2000, 45, 482–485. [Google Scholar]
- Abidi, K.; Xu, J.X.; She, J.H. A discrete-time terminal sliding-mode control approach applied to a motion control problem. IEEE Trans. Ind. Electron. 2009, 56, 3619–3627. [Google Scholar] [CrossRef]
- Li, S.; Du, H.; Yu, X. Discrete-time terminal sliding mode control systems based on Euler’s discretization. IEEE Trans. Autom. Control 2014, 59, 546–552. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index n | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| −1.3188 | 1.9548 | −0.9392 | 0.8491 | 1.3619 | 0.3145 | 0.2648 | 0.2226 | |
| 0.0007 | 0.0058 | 0.0196 | 0.0466 | 0.0909 | 0.1571 | 0.2495 | 0.3724 | |
| Index n | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 0.0456 | 0.2584 | 1.5619 | −0.2742 | −0.3569 | −0.3978 | −0.4230 | ||
| 0.5303 | 0.7274 | 0.9682 | 1.2570 | 1.5982 | 1.9961 | 2.4551 |
| Index m | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| −17.5517 | −15.7191 | −7.8020 | 13.5245 | 58.4796 | −30.1681 | −0.9978 | 0.4027 | |
| 0.0001 | 0.0013 | 0.0064 | 0.0201 | 0.0491 | 0.1019 | 0.1888 | 0.3220 | |
| Index m | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| −0.0577 | 0.1685 | 0.2633 | 0.1806 | 0.2844 | 0.2620 | 0.5739 | ||
| 0.5158 | 0.7862 | 1.1510 | 1.6302 | 2.2453 | 3.0201 | 3.9799 |
| −1.9560 | 0.9545 | −0.3095 | 0.3086 |
| Frequency/Hz | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.1/0.2/0.3/0.4/0.5 |
|---|---|---|---|---|---|---|
| RMSE (mm) | 0.0052 | 0.0098 | 0.0145 | 0.0190 | 0.0231 | 0.0271 |
| MAE (mm) | 0.0040 | 0.0076 | 0.0113 | 0.0149 | 0.0182 | 0.0083 |
| DSMC | 3.50 | - | 7/11 | 0.25 | 0.50 | 1/2 | 0.01 |
| DTSMC | 3.50 | 0.55 | 7/11 | 0.25 | 0.50 | 1/2 | 0.01 |
| Frequency/Hz | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.1/0.2/0.3/0.4/0.5 | |
|---|---|---|---|---|---|---|---|
| RMSE (mm) | DSMC | 0.0565 | 0.0942 | 0.1054 | 0.1514 | 0.2226 | 0.1536 |
| DTSMC | 0.0536 | 0.0612 | 0.0750 | 0.0761 | 0.0847 | 0.0500 | |
| MAE (mm) | DSMC | 0.0207 | 0.0504 | 0.0788 | 0.1255 | 0.1834 | 0.0990 |
| DTSMC | 0.0122 | 0.0215 | 0.0314 | 0.0389 | 0.0456 | 0.0242 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Wang, Q.; Li, Y.; Jiang, Z. Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity. Appl. Sci. 2019, 9, 2625. https://doi.org/10.3390/app9132625
Li M, Wang Q, Li Y, Jiang Z. Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity. Applied Sciences. 2019; 9(13):2625. https://doi.org/10.3390/app9132625
Chicago/Turabian StyleLi, Mengmeng, Qinglin Wang, Yuan Li, and Zhaoguo Jiang. 2019. "Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity" Applied Sciences 9, no. 13: 2625. https://doi.org/10.3390/app9132625
APA StyleLi, M., Wang, Q., Li, Y., & Jiang, Z. (2019). Modeling and Discrete-Time Terminal Sliding Mode Control of a DEAP Actuator with Rate-Dependent Hysteresis Nonlinearity. Applied Sciences, 9(13), 2625. https://doi.org/10.3390/app9132625