Application of Multi-Dimension Input Convolutional Neural Network in Fault Diagnosis of Rolling Bearings


Abstract
:Featured Application
Abstract
1. Introduction
2. Basic Theory of the CNN
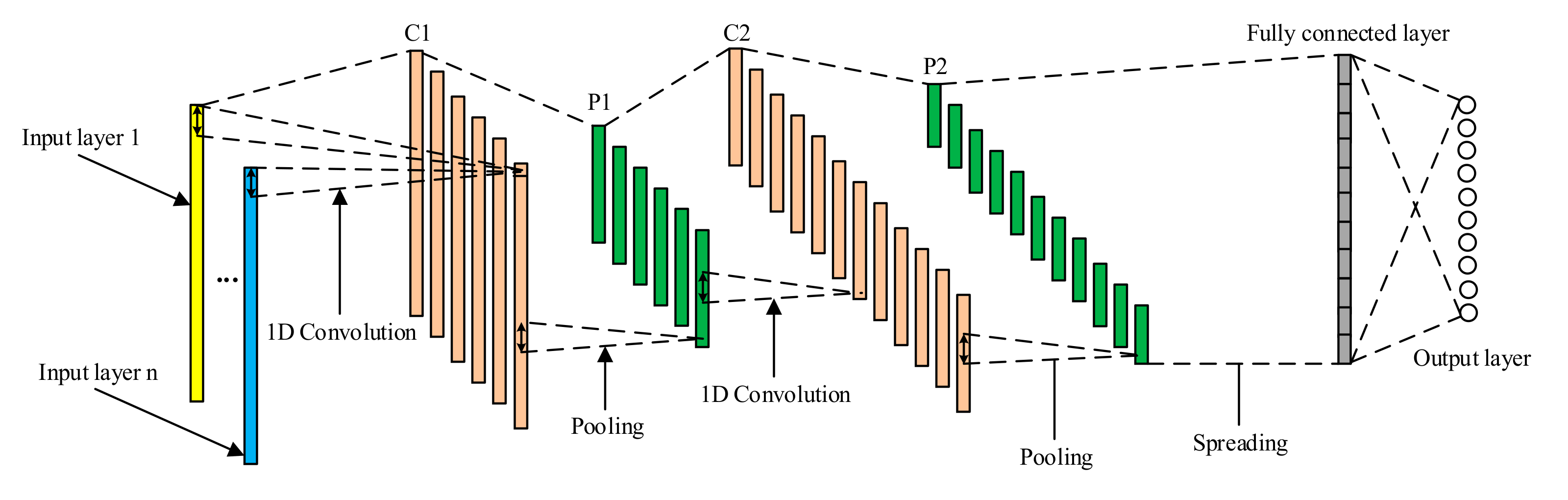
3. The Proposed Method
3.1. Data Fusion in MDI-CNN
3.2. General Procedure of the Propose Method
- Input: Sample Set, Network parameters
- Initialize network structure
- While
- Termination condition is not valid
- 1. Perform feature extraction and fusion in the convolutional layer
- 2. Perform dimension reduction of a feature map in the pooling layer
- 3. Input the feature map into the last fully connected layer, and use a Softmax activation function to obtain classification probability value
- 4. Calculate the loss function value and update parameters using the BP algorithm
- End while
- Input test set into the trained model to determine model accuracy
- Output: Predictive results for samples from test set
4. Evaluation Metrics and Validation Scheme
4.1. Evaluation Metrics
- TP indicates that a true positive is correctly classified as a positive sample.
- FP indicates that a false positive is misclassified as a positive sample.
- TN indicates that a true negative is correctly classified as a negative sample.
- FN indicates that a false negative is misclassified as a negative sample.
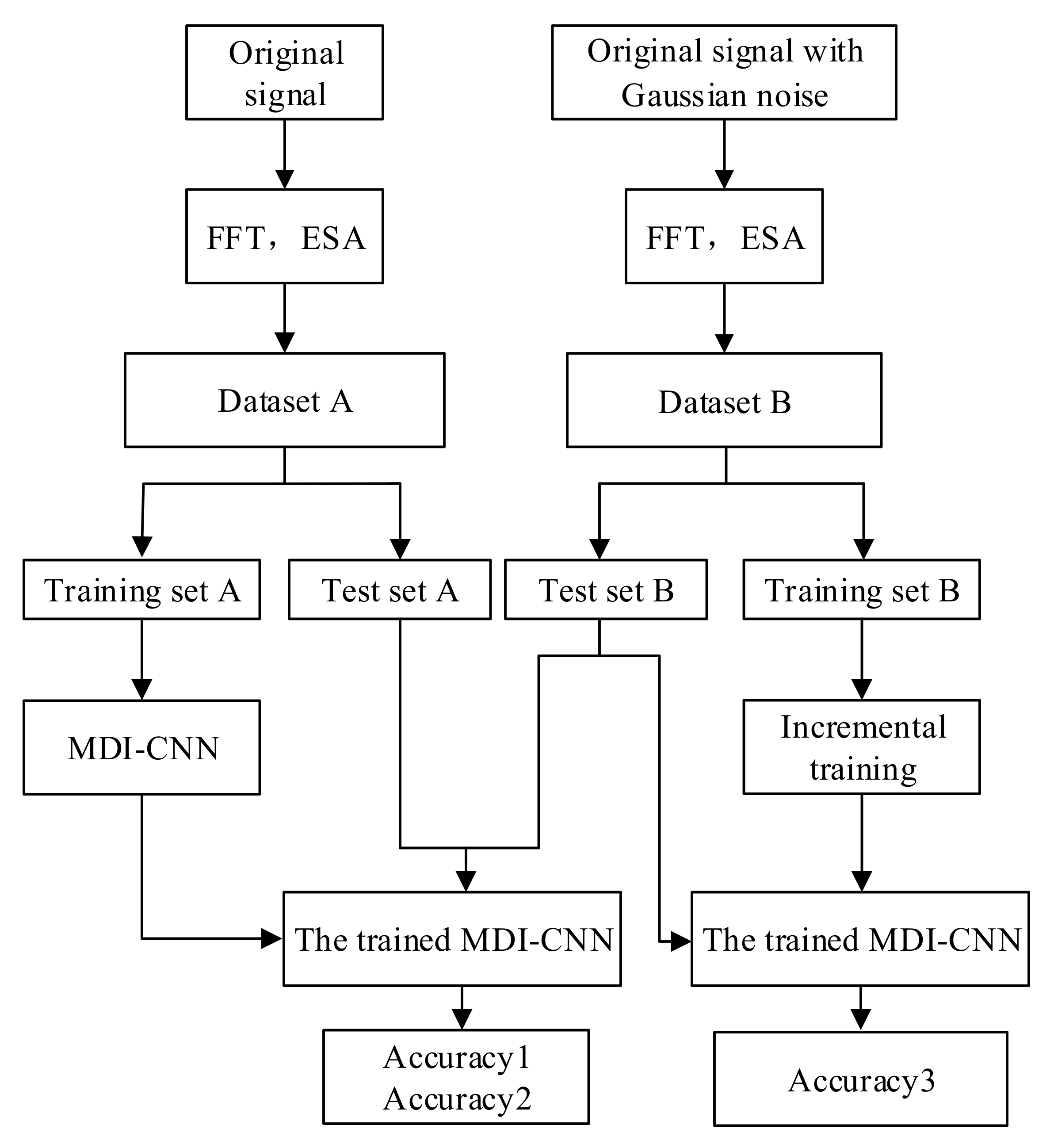
4.2. Validation Scheme
- The original signal and the noisy signal that was obtained by mixing the original signal with Gaussian white noise, were processed by the fast Fourier transformation (FFT) and envelope spectrum analysis (ESA) to form the dataset A and dataset B, respectively. 87.5% of a sample in a randomly selected dataset consists of a training set, and the remaining samples are composed of a test set.
- The network parameters, including , , number of iterations , number of batch processing , learning rate , and weight coefficient , were initialized.
- The training set A was entered into the CNN model in batches for adaptive extraction of signal characteristics. The error between the predicted and actual values after the forward propagation was calculated. The error was then propagated in reverse direction by the BP algorithm in order to update the network parameters A and B layer by layer until the end of the iteration.
- Test datasets A and B were entered into the trained MDI-CNN model to verify the validity and robustness of the model.
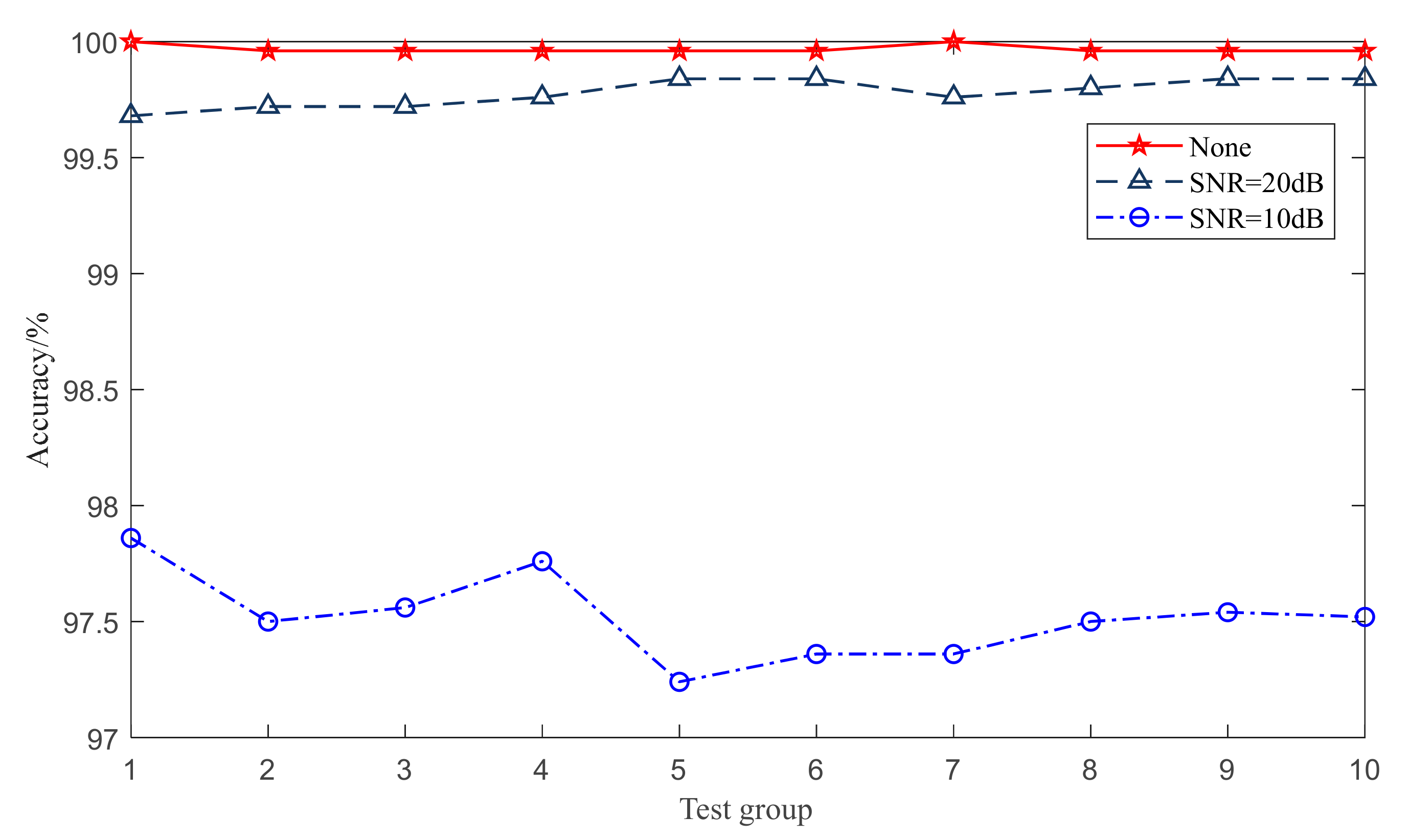
- The training set B was fed into the trained MDI-CNN model for incremental training. Finally, generalization performance was validated by entering test dataset B again into the model.
5. Experimental Results and Discussion
5.1. Experiment 1
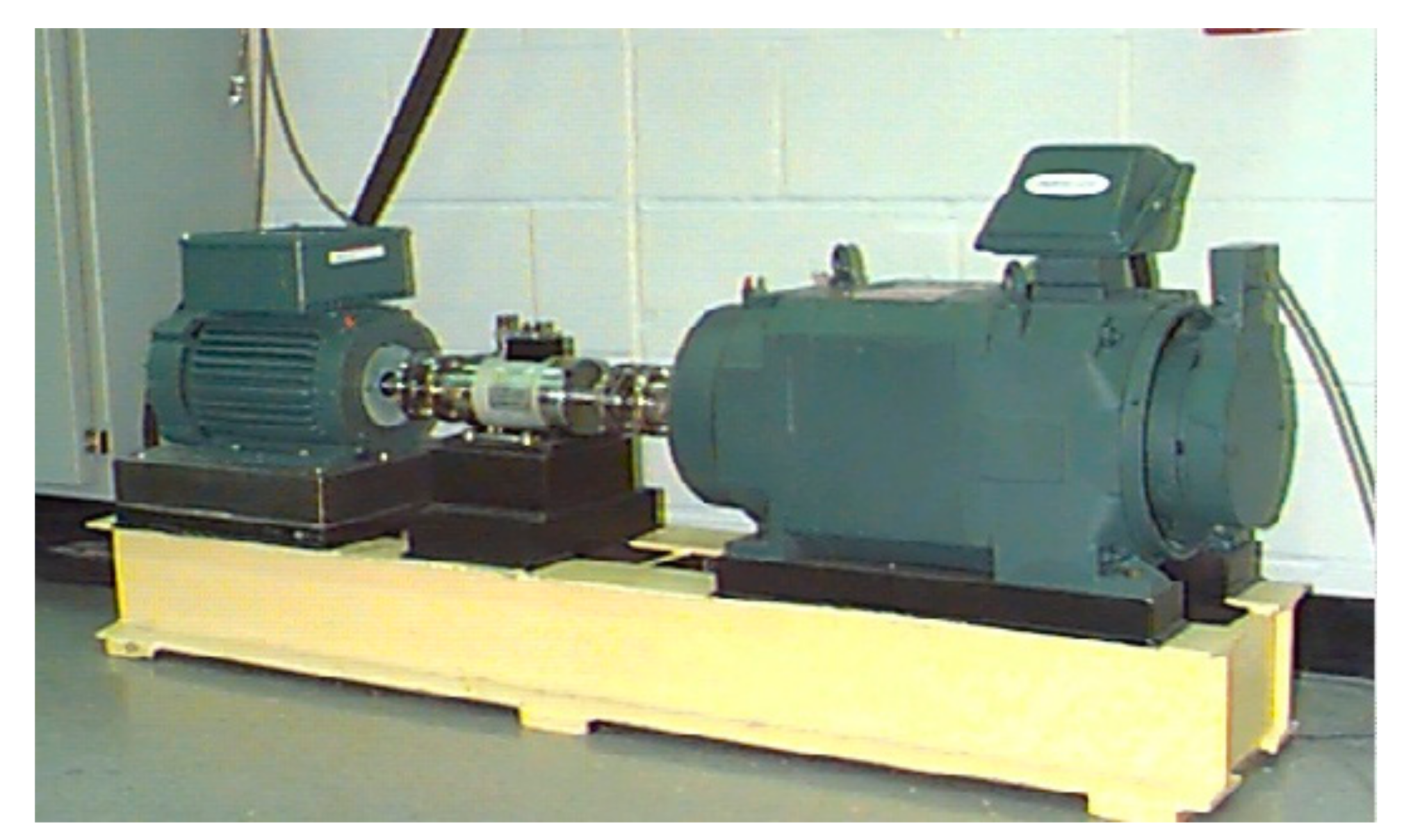
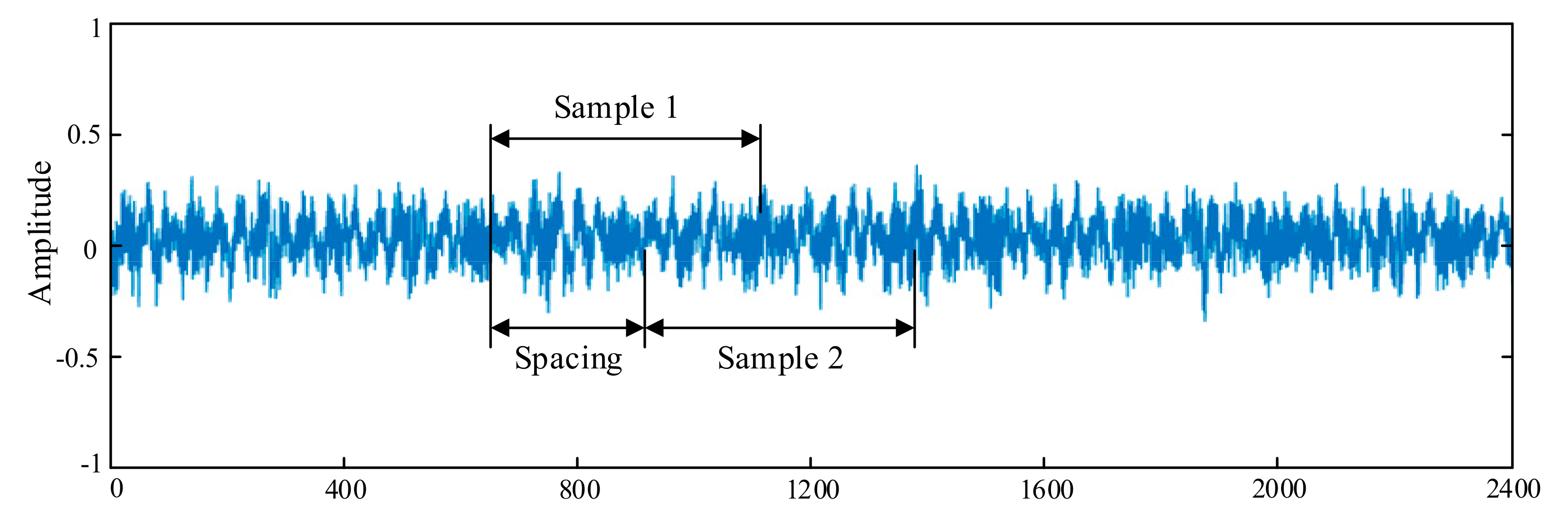
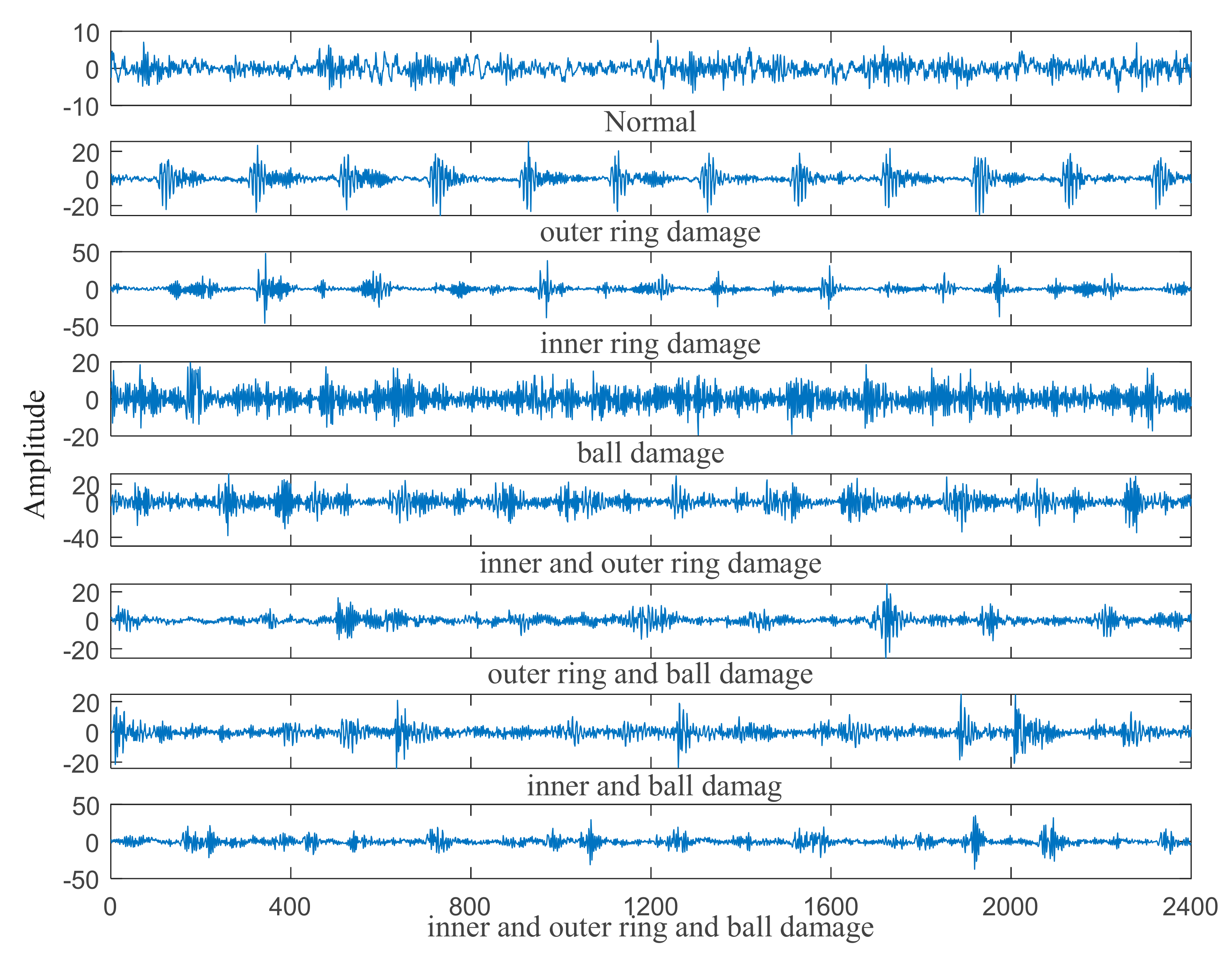
5.1.1. Description of Experimental Data
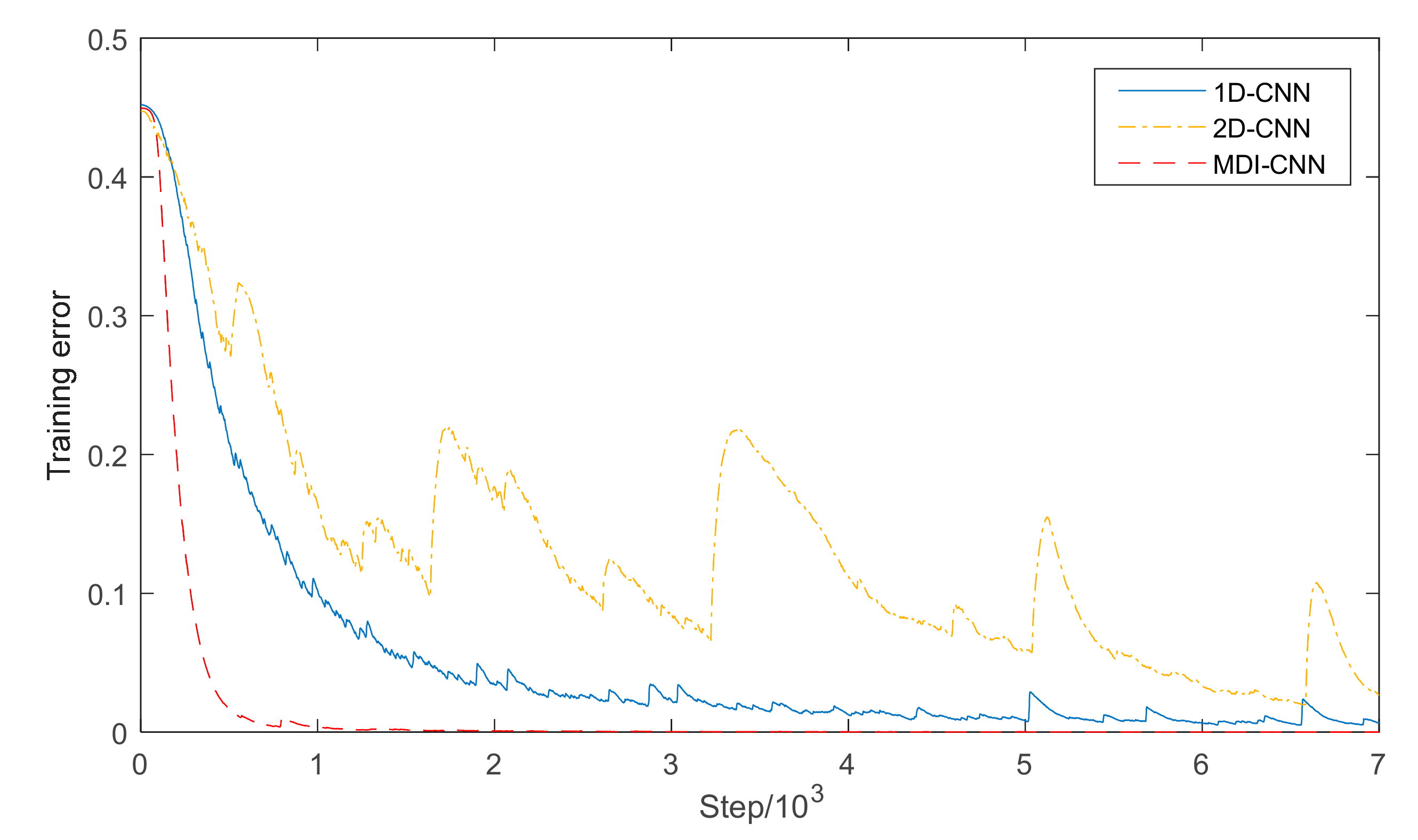
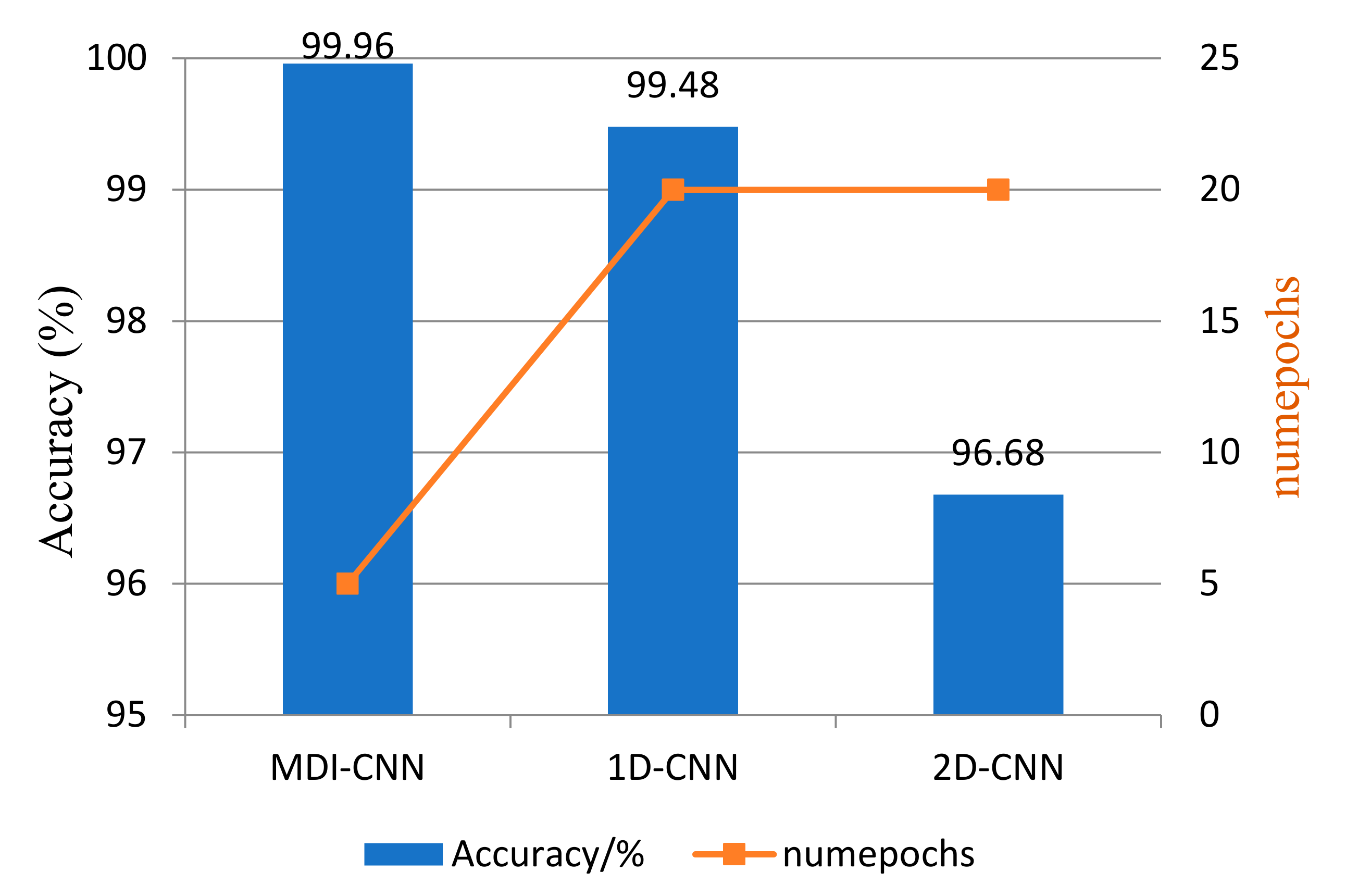
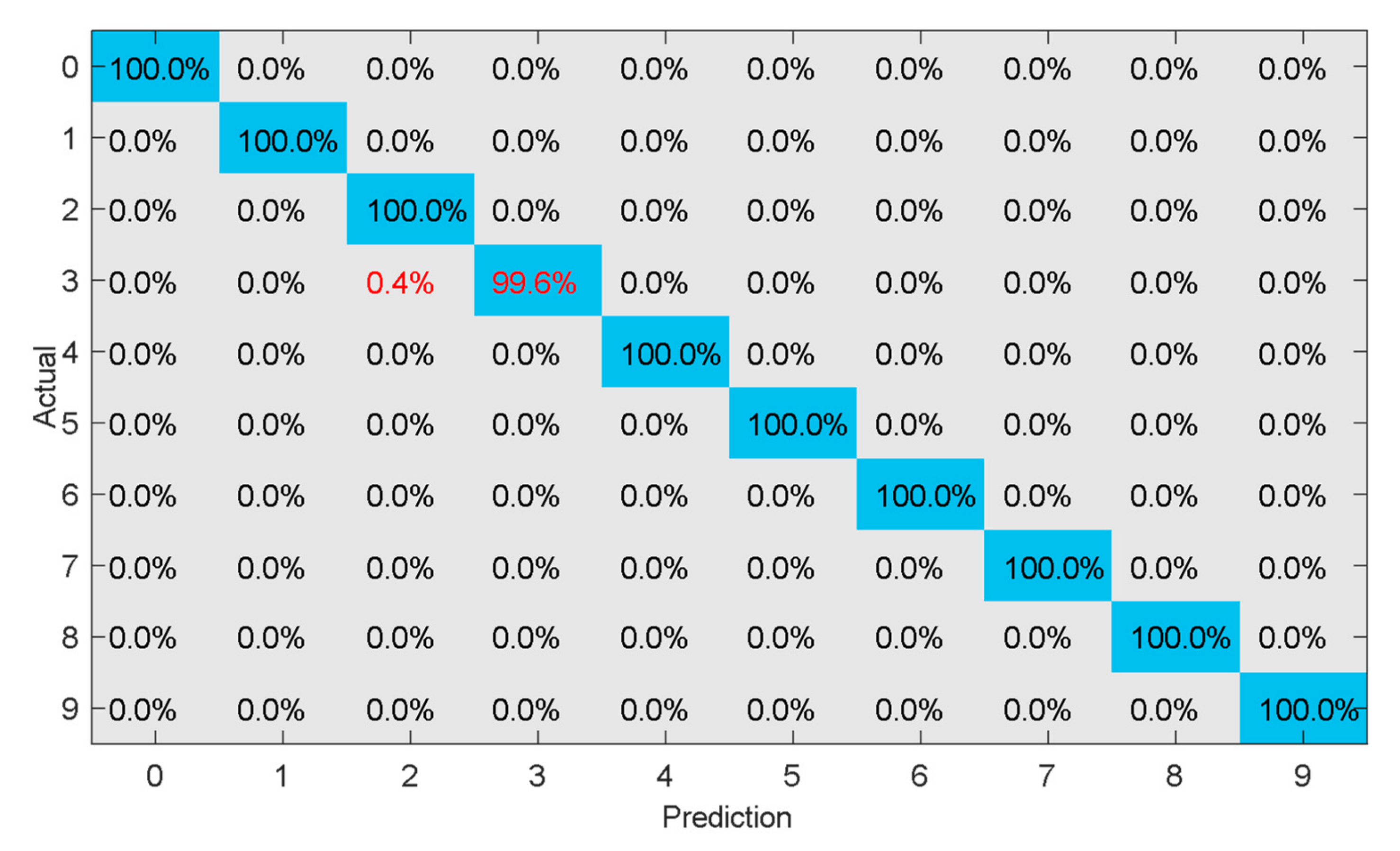
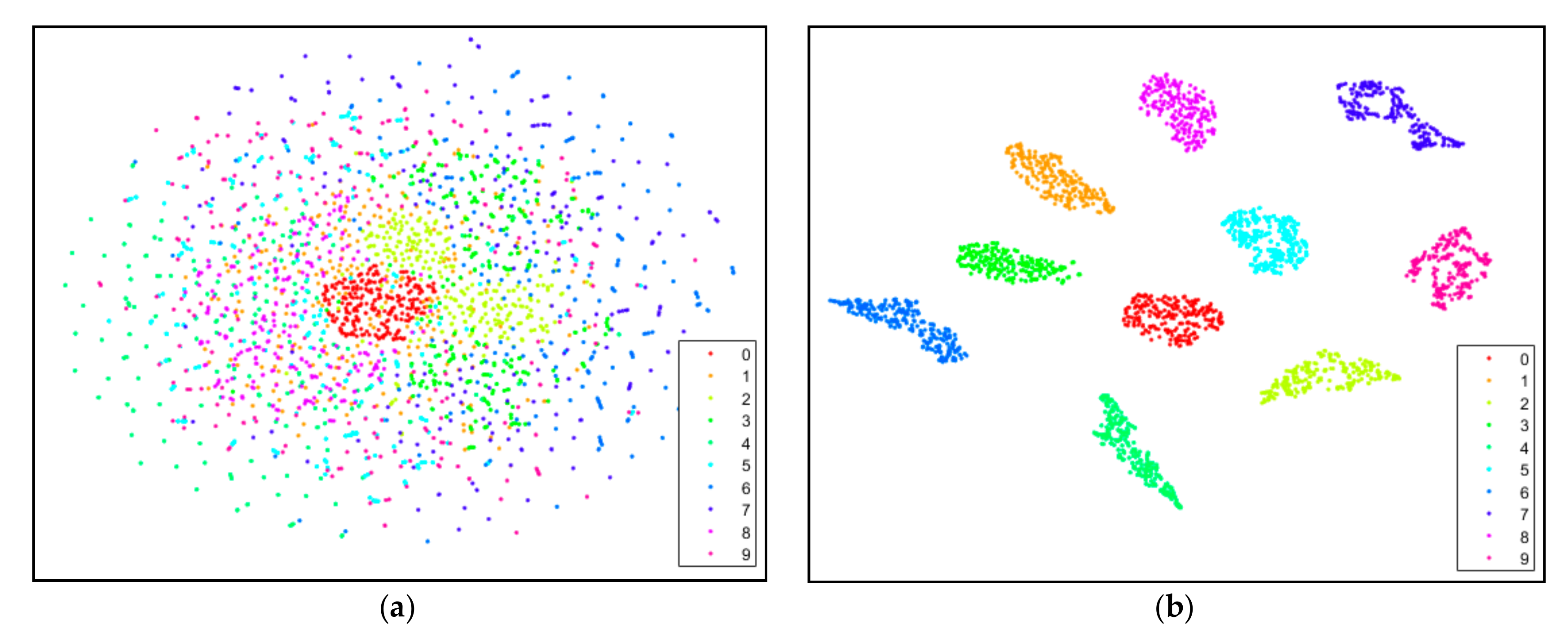
5.1.2. Performance Comparison and Discussion
5.2. Experiment 2
5.2.1. Description of Experimental Data
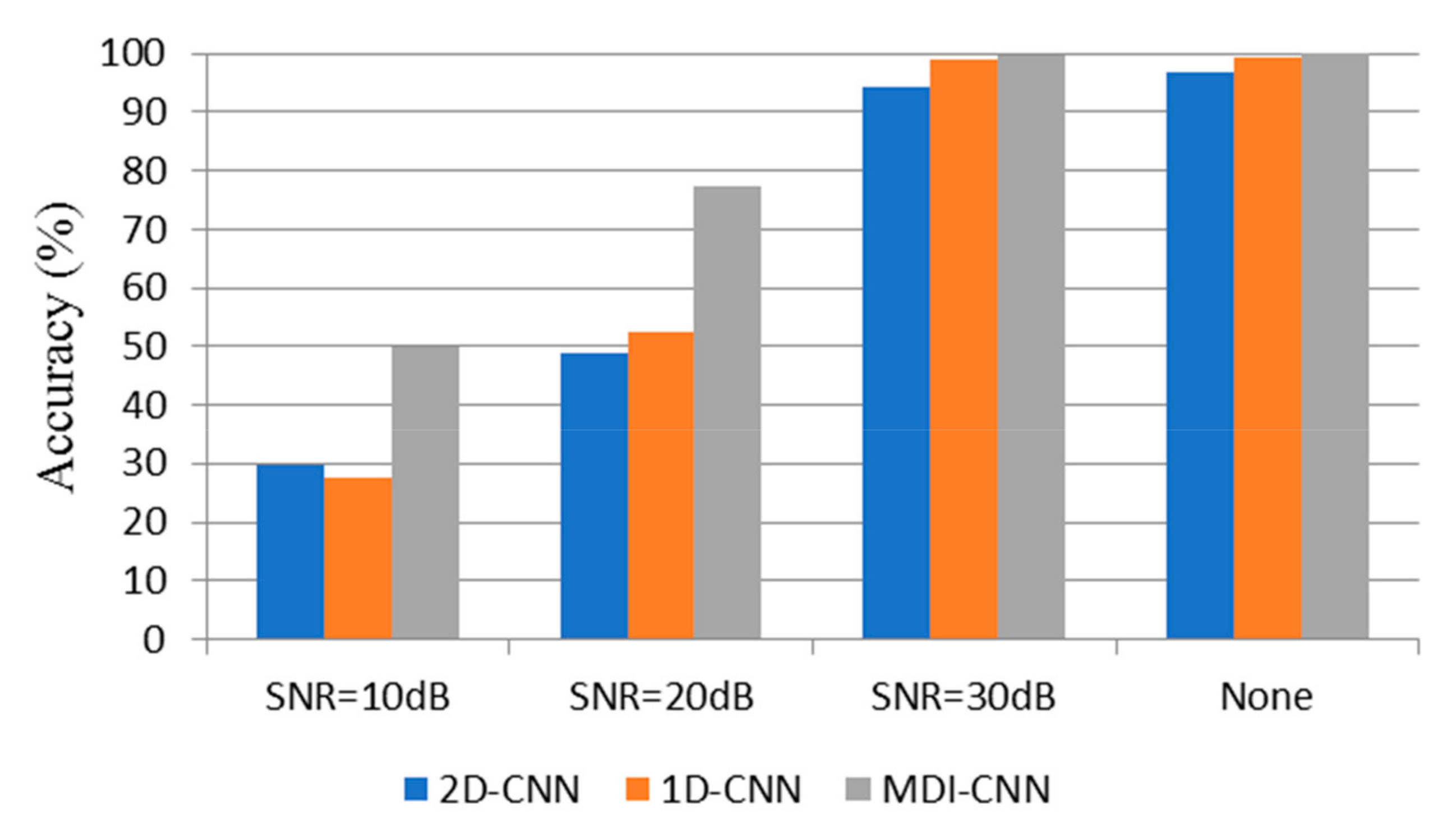
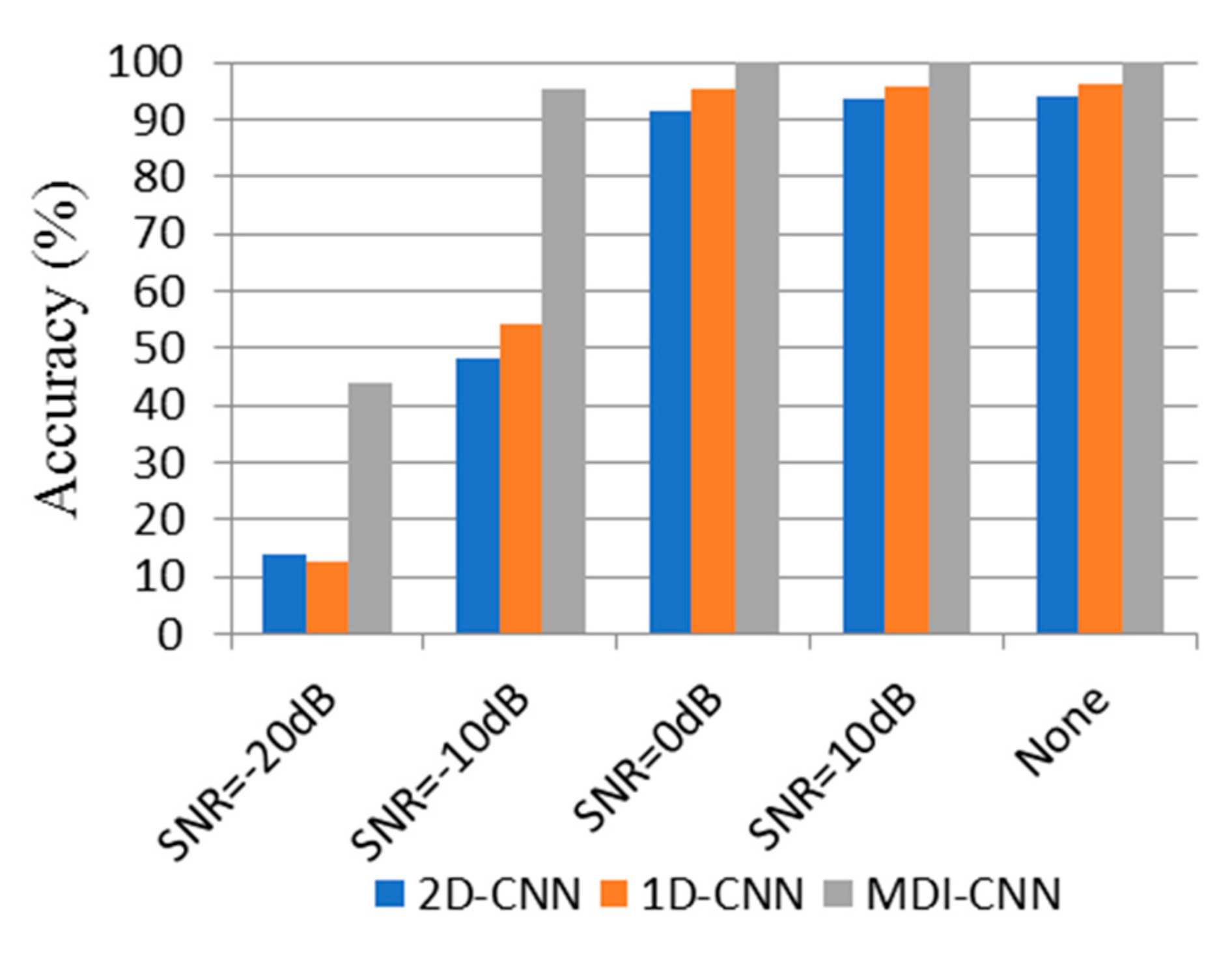
5.2.2. Performance Comparison and Discussion
6. Conclusions and Future Work
- Compared with the traditional CNN model, the proposed model converges more quickly, has shorter training time, and achieves very good results in mixed fault identification;
- The environmental noise seriously affects the recognition accuracy of the intelligent diagnostic model, and the proposed model can reduce the influence of noise on the recognition results. By using the noise data for incremental training, the fault recognition accuracy of the model is obviously improved;
- Different data processing methods have different effects on diagnosis results of the traditional CNN models. The proposed model can fuse a variety of data and has high fault recognition accuracy, convergence, robustness, and generalization ability, providing a new method for real-time fault monitoring of mechanical equipment.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- El-Thalji, I.; Jantunen, E. A summary of fault modelling and predictive health monitoring of rolling element bearings. Mech. Syst. Signal Process. 2015, 60, 252–272. [Google Scholar] [CrossRef]
- Cui, L.L.; Wang, X.; Xu, Y.G.; Jiang, H.; Zhou, J.P. A novel Switching Unscented Kalman Filter method for remaining useful life prediction of rolling bearing. Measurement 2019, 135, 678–684. [Google Scholar] [CrossRef]
- Wang, H.; Ke, Y.; Luo, G.; Tang, G. Compressed sensing of roller bearing fault based on multiple down-sampling strategy. Meas. Sci. Technol. 2016, 27, 25009–25018. [Google Scholar] [CrossRef]
- Jiang, H.; Xia, Y.; Wang, X. Rolling bearing fault detection using an adaptive lifting multiwavelet packet with a dimension spectrum. Meas. Sci. Technol. 2013, 24, 125002–125012. [Google Scholar] [CrossRef]
- Chen, X.H.; Cheng, G.; Shan, X.L.; Hu, X.; Guo, Q.; Liu, X.G. Research of weak fault feature information extraction of planetary gear based on ensemble empirical mode decomposition and adaptive stochastic resonance. Measurement 2015, 73, 55–67. [Google Scholar] [CrossRef]
- Cui, L.L.; Huang, J.F.; Zhang, F.B.; Chu, F.L. HVSRMS localization formula and localization law: Localization diagnosis of a ball bearing outer ring fault. Mech. Syst. Signal Process. 2019, 120, 608–629. [Google Scholar] [CrossRef]
- Li, H.; Zhang, Q.; Qin, X.R.; Sun, Y.T. Fault diagnosis method for rolling bearings based on short-time Fourier transform and convolutional neural network. J. Vib. Shock 2018, 37, 124–131. [Google Scholar] [CrossRef]
- Cui, L.L.; Wang, X.; Wang, H.Q.; Wu, N. Improved Fault Size Estimation Method for Rolling Element Bearings Based on Concatenation Dictionary. IEEE Access 2019, 7, 22710–22718. [Google Scholar] [CrossRef]
- Cui, L.L.; Li, B.B.; Ma, J.F.; Jin, Z. Quantitative trend fault diagnosis of a rolling bearing based on Sparsogram and Lempel-Ziv. Measurement 2018, 128, 410–418. [Google Scholar] [CrossRef]
- Tian, J.; Morillo, C.; Azarian, M.H.; Pecht, M. Motor bearing fault detection using spectral kurtosis-based feature extraction coupled with K-nearest neighbor distance analysis. IEEE Ind. Electron. Soc. 2016, 63, 1793–1803. [Google Scholar] [CrossRef]
- Bhadane, M.; Ramachandran, K.I. Bearing fault identification and classification with convolutional neural network. In Proceedings of the 2017 International Conference on Circuit, Kollam, India, 20–21 April 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Cui, L.L.; Yao, T.C.; Zhang, Y. Application of pattern recognition in gear faults based on the matching pursuit of a characteristic waveform. Measurement 2017, 104, 212–222. [Google Scholar] [CrossRef]
- Zhang, Z.; Verma, A.; Kusiak, A. Fault analysis and condition monitoring of the wind turbine gearbox. IEEE Trans. Energy Convers. 2012, 27, 526–535. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.; Wang, K. Fault diagnosis and prognosis using wavelet packet decomposition, Fourier transform and artificial neural network. J. Intell. Manuf. 2013, 24, 1213–1227. [Google Scholar] [CrossRef]
- Lei, Y.; Zuo, M.J. Fault diagnosis of rotating machinery using an improved HHT based on EEMD and sensitive IMFs. Meas. Sci. Technol. 2009, 20, 125701–125713. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Liu, J.; Li, Y.F.; Zio, E. A SVM framework for fault detection of the braking system in a high-speed train. Mech. Syst. Signal Process. 2017, 87, 401–409. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.; Cheng, J. A roller hearing fault diagnosis method baesd on EMD energy entropy and ANN. J. Sound Vib. 2006, 294, 269–277. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar] [CrossRef]
- Unal, M.; Onat, M.; Demetgul, M.; Kucuk, H. Fault diagnosis of rolling bearings using a genetic algorithm optimized neural network. Measurement 2014, 58, 187–196. [Google Scholar] [CrossRef]
- Xie, N.; Ma, F.; Zheng, B. Rolling element bearing diagnostic based on EEMD and SVM. In Proceedings of the 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 1658–1662. [Google Scholar] [CrossRef]
- Ding, X.; He, Q. Energy-Fluctuated Multiscale Feature Learning with Deep ConvNet for Intelligent Spindle Bearing Fault Diagnosis. IEEE Trans. Instrum. Meas. 2017, 66, 1926–1935. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, H.; Wang, F. A novel deep autoencoder feature learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2017, 95, 187–204. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72, 303–315. [Google Scholar] [CrossRef]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Saf. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- Gan, M.; Wang, C.; Zhu, C. Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings. Mech. Syst. Signal Process. 2015, 72 –73, 92–104. [Google Scholar] [CrossRef]
- Dong, W.; Qingwu, G.; Wenqing, L. Research on internal and external fault diagnosis and fault-selection of transmission line based on convolutional neural network. Proc. CSEE 2016, 36, 21–28. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, F.; Chen, W.; Jiang, Y.; Song, D. Fault State Recognition of Rolling Bearing Based Fully Convolutional Network. Comput. Sci. Eng. 2018, 1. [Google Scholar] [CrossRef]
- Appana, D.K.; Alexander, P.; Jong-Myon, K. Reliable fault diagnosis of bearings with varying rotational speeds using envelope spectrum and convolution neural networks. Soft Comput. 2018, 22, 6719–6729. [Google Scholar] [CrossRef]
- Guo, S.; Yang, T.; Gao, W.; Zhang, C. A Novel Fault Diagnosis Method for Rotating Machinery Based on a Convolutional Neural Network. Sensors 2018, 18, 1429. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Tang, B.P.; Deng, L. Multi-level wavelet packet fusion in dynamic ensemble convolutional neural network for fault diagnosis. Measurement 2018, 127, 246–255. [Google Scholar] [CrossRef]
- Lu, C.; Zhou, B.; Wang, Z.Y. Intelligent fault diagnosis of rolling bearing using hierarchical convolutional network based health state classification. Adv. Eng. Inform. 2017, 32, 139–151. [Google Scholar] [CrossRef]
- Fuan, W.; Hongkai, J.; Haidong, S.; Wenjing, D.; Shuaipeng, W. An adaptive deep convolutional neural network for rolling bearing fault diagnosis. Meas. Sci. Technol. 2017, 28, 95005–95022. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Peng, D.; Liu, Z.; Wang, H.; Qin, Y.; Jia, L. A Novel Deeper One-Dimensional CNN With Residual Learning for Fault Diagnosis of Wheelset Bearings in High-Speed Trains. IEEE Access 2019, 7, 10278–10293. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A New Deep Learning Model for Fault Diagnosis with Good Anti-Noise and Domain Adaptation Ability on Raw Vibration Signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed]
- Levent, E.; Turker, I.; Serkan, K. A Generic Intelligent Bearing Fault Diagnosis System Using Compact Adaptive 1D CNN Classifier. J. Signal Process. Syst. 2018, 91, 179–189. [Google Scholar] [CrossRef]
- Zan, T.; Liu, Z.; Wang, H.; Wang, M.; Gao, X. Control chart pattern recognition using the convolutional neural network. J. Intell. Manuf. 2019, 30. [Google Scholar] [CrossRef]
- Jiang, G.; He, H.; Yan, J.; Xie, P. Multiscale Convolutional Neural Networks for Fault Diagnosis of Wind Turbine Gearbox. IEEE Trans. Ind. Electron. 2019, 66, 3196–3207. [Google Scholar] [CrossRef]
- He, H.B.; Garcia, E.A. Learning from imbalanced data. IEEE Trans. Knowl. Data Eng. 2009, 21, 1263–1284. [Google Scholar] [CrossRef]
- Li, X.; Zhang, W.; Ding, Q. A robust intelligent fault diagnosis method for rolling element bearings based on deep distance metric learning. Neurocomputing 2018, 310, 77–95. [Google Scholar] [CrossRef]
- Qu, J.L.; Yu, L.; Yuan, T.; Tian, Y.; Gao, F. Adaptive fault diagnosis algorithm for rolling bearings based on one-dimensional convolutional neural network. Chin. J. Sci. Instrum. 2018, 39, 134–143. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Value | Predicted Value | |
|---|---|---|
| Label 1 | Label 2 | |
| Label 1 | TP | FP |
| Label 2 | FN | TN |
| Damage Position | None | Scroll Body | Inner Ring | Outer Ring | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Label | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Damage diameter/inch | 0 | 0.007 | 0.014 | 0.021 | 0.007 | 0.014 | 0.021 | 0.007 | 0.014 | 0.021 |
| Training set | 1750 | 1750 | 1750 | 1750 | 1750 | 1750 | 1750 | 1750 | 1750 | 1750 |
| Test set | 250 | 250 | 250 | 250 | 250 | 250 | 250 | 250 | 250 | 250 |
| Parameter Name | C1 Layer | P1 Layer | C2 Layer | P2 Layer | Spacing |
|---|---|---|---|---|---|
| Parameter value | 59 | ||||
| Parameter name | numepochs | batchsize | alpha | q1, q2, q3 | Number of neurons |
| Parameter value | 5 | 50 | 0.05 | (1, 1, 1) | (6, 12) |
| Algorithm Model | Number of Epochs | Accuracy (%) |
|---|---|---|
| FFT-SVM | - | 84.20 |
| Wavelet-ANN | - | 88.54 |
| EMD-ANN | - | 96.24 |
| DWT-CNN [39] | 60 | 99.80 |
| PSO-CNN [31] | 20 | 92.84 |
| WP-PSO-CNN [31] | 20 | 99.71 |
| STFT-CNN [7] | 16 | 99.87 |
| ACNN-FD [42] | 12 | 99.40 |
| MDI-CNN | 5 | 99.96 |
| Model | Training Set | Number of Epochs | SNR of Noise in Test Set | Accuracy (%) |
|---|---|---|---|---|
| 2D-CNN | Two-dimensional raw data | 20 | None | 93.85 |
| −10 dB | 48.35 | |||
| Two-dimensional FFT data | 10 | None | 99.00 | |
| −10 dB | 75.40 | |||
| Two-dimensional ESA data | 10 | None | 97.50 | |
| −10 dB | 59.85 | |||
| 1D-CNN | One-dimensional raw data | 20 | None | 96.15 |
| −10 dB | 54.35 | |||
| One-dimensional FFT data | 10 | None | 99.85 | |
| −10 dB | 94.10 | |||
| One-dimensional ESA data | 10 | None | 96.50 | |
| −10 dB | 57.55 | |||
| MDI-CNN | Raw data, FFT data, ESA data | 5 | None | 99.95 |
| −10 dB | 95.50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zan, T.; Wang, H.; Wang, M.; Liu, Z.; Gao, X. Application of Multi-Dimension Input Convolutional Neural Network in Fault Diagnosis of Rolling Bearings. Appl. Sci. 2019, 9, 2690. https://doi.org/10.3390/app9132690
Zan T, Wang H, Wang M, Liu Z, Gao X. Application of Multi-Dimension Input Convolutional Neural Network in Fault Diagnosis of Rolling Bearings. Applied Sciences. 2019; 9(13):2690. https://doi.org/10.3390/app9132690
Chicago/Turabian StyleZan, Tao, Hui Wang, Min Wang, Zhihao Liu, and Xiangsheng Gao. 2019. "Application of Multi-Dimension Input Convolutional Neural Network in Fault Diagnosis of Rolling Bearings" Applied Sciences 9, no. 13: 2690. https://doi.org/10.3390/app9132690
APA StyleZan, T., Wang, H., Wang, M., Liu, Z., & Gao, X. (2019). Application of Multi-Dimension Input Convolutional Neural Network in Fault Diagnosis of Rolling Bearings. Applied Sciences, 9(13), 2690. https://doi.org/10.3390/app9132690