“Texting & Driving” Detection Using Deep Convolutional Neural Networks

 ,
,  ,
,  ,
,
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Data Acquisition
Data Privacy
3.2. Image Processing
3.3. Model Development
Re-Training Setup
3.4. Model Evaluation
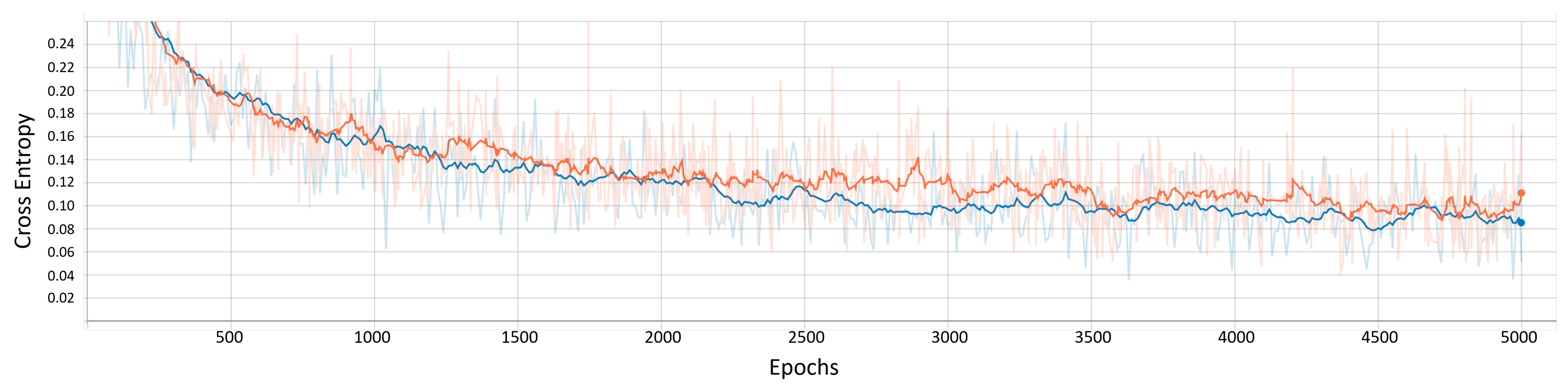
3.4.1. Cross-Entropy
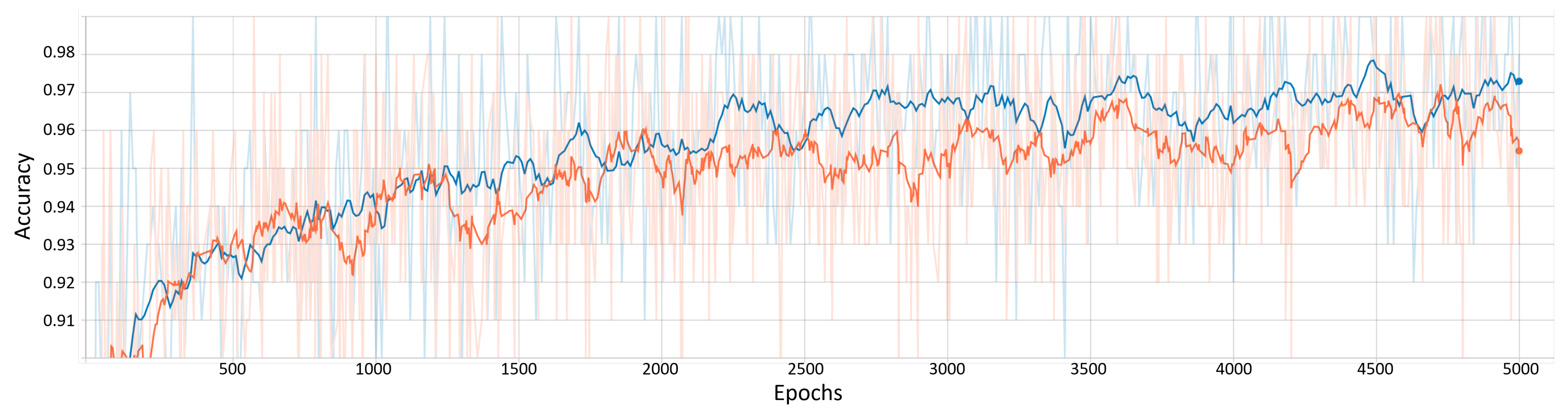
3.4.2. Accuracy
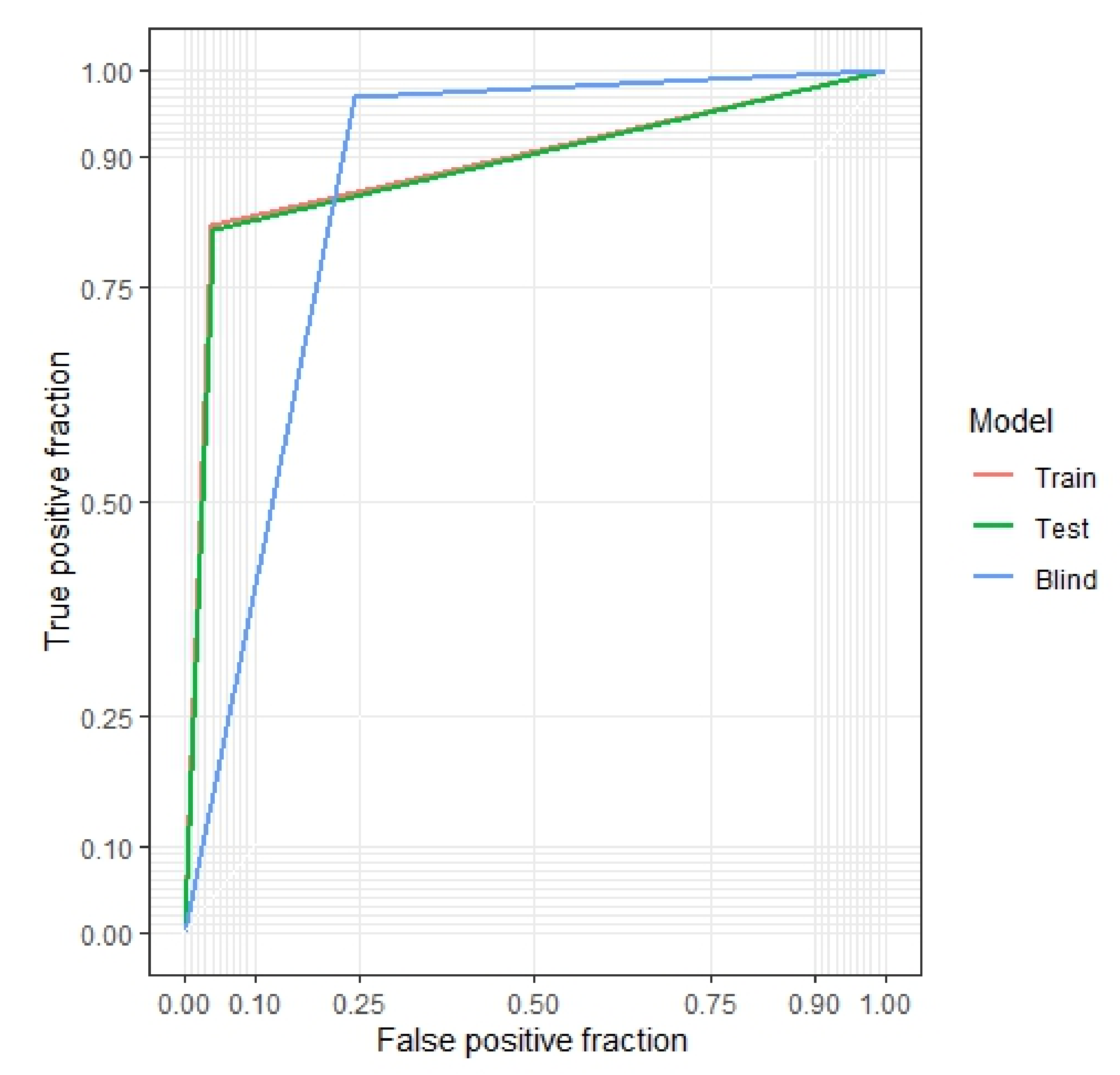
3.4.3. ROC Curve
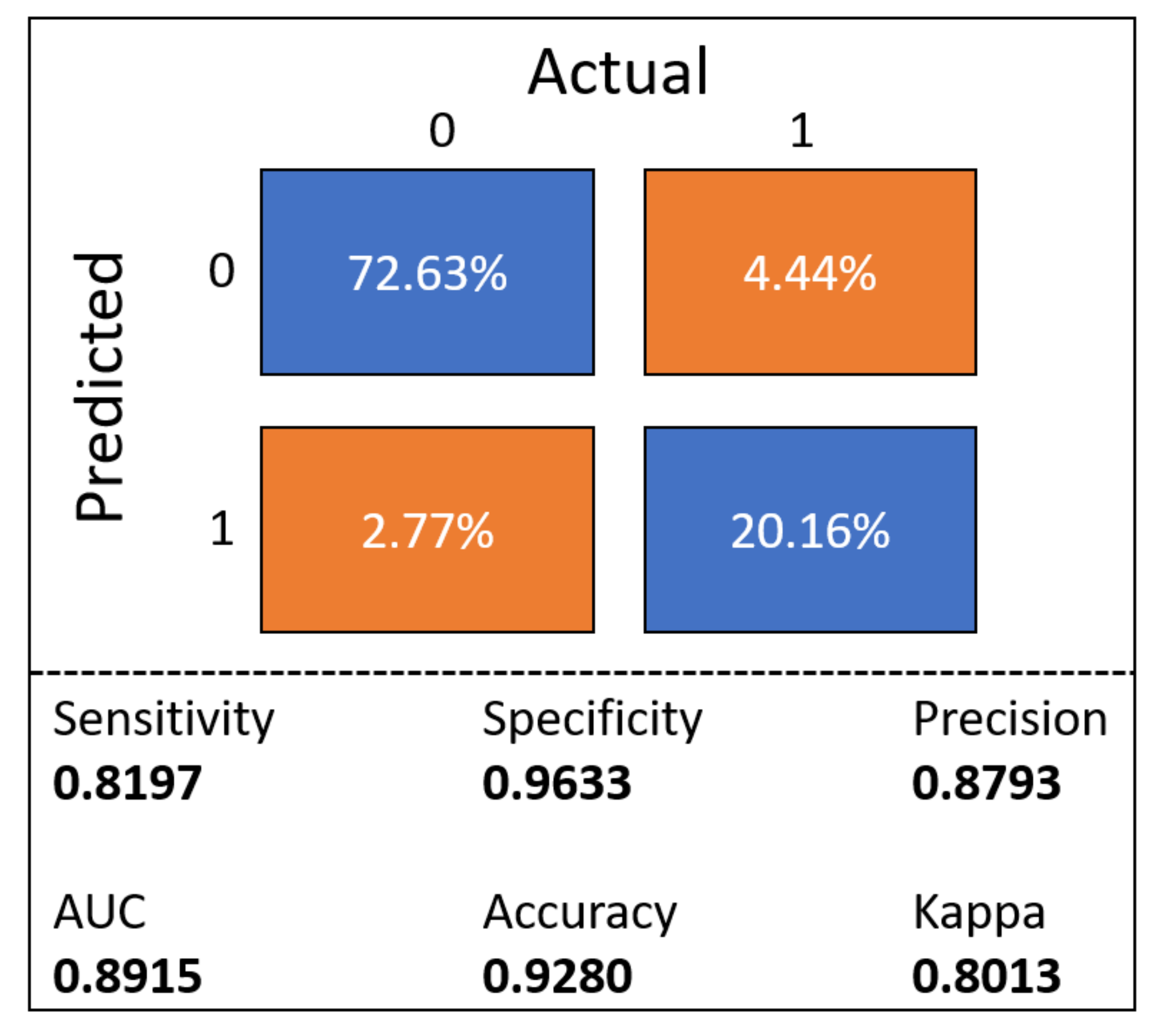
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- You, C.W.; Lane, N.D.; Chen, F.; Wang, R.; Chen, Z.; Bao, T.J.; Montes-de Oca, M.; Cheng, Y.; Lin, M.; Torresani, L.; et al. Carsafe app: Alerting drowsy and distracted drivers using dual cameras on smartphones. In Proceedings of the 11th annual international conference on Mobile Systems, aPplications, and Services, Taipei, Taiwan, 25–28 June 2013; pp. 13–26. [Google Scholar]
- National Highway Traffic Safety Administration. Driver Electronic Device Use in 2015. 2016. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/812326 (accessed on 13 June 2018).
- Federal Communications Commission. Distracted Driving. Available online: https://www.fcc.gov/general/distracted-driving (accessed on 10 June 2018).
- World Health Organization. Global Status Report on Road Safety 2015; World Health Organization: Geneva, Switzerland, 2015. [Google Scholar]
- World Health Organization. Mobile Phone Use: A Growing Problem of Driver Distraction. 2011. Available online: https://www.who.int/violence_injury_prevention/publications/road_traffic/distracted_driving/en/ (accessed on 5 June 2018).
- Li, X.; Rakotonirainy, A.; Yan, X.; Zhang, Y. Driver’s Visual Performance in Rear-End Collision Avoidance Process under the Influence of Cell Phone Use. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 55–63. [Google Scholar] [CrossRef]
- Atiquzzaman, M.; Qi, Y.; Fries, R. Exploring Distracted Driver Detection Algorithms Using a Driving Simulator Study. Transp. Res. Board 2017, 2017, 1–12. [Google Scholar]
- Iqbal, S.T.; Horvitz, E.; Ju, Y.C.; Mathews, E. Hang on a Sec! Effects of Proactive Mediation of Phone Conversations While Driving. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vancouver, BC, Canada, 7–12 May 2011; pp. 463–472. [Google Scholar]
- Klauer, S.G.; Guo, F.; Bruce, G.; Simons-Morton, E.; Ouimet, M.C.; Lee, S.E.; Dingus, T.A. Distracted Driving and Risk of Road Crashes among Novice and Experienced Drivers. N. Engl. J. Med. 2014, 370, 54–59. [Google Scholar] [CrossRef] [Green Version]
- Gliklich, E.; Guo, R.; Bergmark, R.W. Texting while driving: A study of 1211 U.S. adults with the Distracted Driving Survey. Prev. Med. Rep. 2016, 4, 486–489. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Distracted Driving Device Dock. 2017. Available online: https://distracteddrivingdevice.com (accessed on 20 June 2018).
- SmartDrive Systems. First Sensor in SmartDrive’s New Line of Intelligent Driver-Assist Sensors Recognized for Addressing One of the Deadliest Risks in Commercial Transportation. Available online: https://www.smartdrive.net/smartdrive-smartsense-distracted-driving-named-heavy-duty-truckings-2018-top-20-products-list/ (accessed on 22 June 2018).
- Wahlström, J.; Skog, I.; Händel, P. Smartphone-based vehicle telematics: A ten-year anniversary. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2802–2825. [Google Scholar]
- Saiprasert, C.; Supakwong, S.; Sangjun, W.; Thajchayapong, S. Effects of smartphone usage on driver safety level performance in urban road conditions. In Proceedings of the 2014 11th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Nakhon Ratchasima, Thailand, 14–17 May 2014; pp. 1–6. [Google Scholar]
- He, J.; Chaparro, A.; Wu, X.; Crandall, J.; Ellis, J. Mutual interferences of driving and texting performance. Compute. Hum. Behav. 2015, 52, 115–123. [Google Scholar]
- Watkins, M.L.; Amaya, I.A.; Keller, P.E.; Hughes, M.A.; Beck, E.D. Autonomous detection of distracted driving by cell phone. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1960–1965. [Google Scholar]
- Bo, C.; Jian, X.; Jung, T.; Han, J.; Li, X.Y.; Mao, X.; Wang, Y. Detecting driver’s smartphone usage via nonintrusively sensing driving dynamics. IEEE Internet Things J. 2017, 4, 340–350. [Google Scholar]
- Chu, H.; Raman, V.; Shen, J.; Kansal, A.; Bahl, V.; Choudhury, R.R. I am a smartphone and I know my user is driving. In Proceedings of the 2014 Sixth International Conference on Communication Systems and Networks (COMSNETS), Bangalore, India, 6–10 January 2014; pp. 1–8. [Google Scholar]
- Mantouka, E.G.; Barmpounakis, E.N.; Vlahogianni, E.I. Mobile Sensing and Machine Learning for Identifying Driving Safety Profiles; Technical Report; Transportation Research Board: Washington, DC, USA, 2018. [Google Scholar]
- Dai, J.; Teng, J.; Bai, X.; Shen, Z.; Xuan, D. Mobile phone based drunk driving detection. In Proceedings of the 2010 4th International Conference on Pervasive Computing Technologies for Healthcare, Munich, Germany, 22–25 March 2010; pp. 1–8. [Google Scholar]
- Händel, P.; Skog, I.; Wahlström, J.; Bonawiede, F.; Welch, R.; Ohlsson, J.; Ohlsson, M. Insurance Telematics: Opportunities and Challenges with the Smartphone Solution. IEEE Intell. Transp. Syst. Mag. 2014, 6, 57–70. [Google Scholar]
- Engelbrecht, J.; Booysen, M.J.; van Rooyen, G.J.; Bruwer, F.J. Survey of smartphone-based sensing in vehicles for intelligent transportation system applications. IET Intell. Transp. Syst. 2015, 9, 924–935. [Google Scholar]
- True Motion Technologies. True Motion. 2019. Available online: https://gotruemotion.com/category/distracted-driving/ (accessed on 6 June 2019).
- True Motion Technologies. Mojo. 2019. Available online: https://gotruemotion.com/distracted-driving/announcing-mojo-the-app-that-rewards-safe-driving/ (accessed on 19 June 2019).
- Cambridge Mobile Telematics (CMT). DriveWell: A Behavior-Based Program. 2019. Available online: https://www.cmtelematics.com/drivewell/ (accessed on 6 June 2019).
- Limited The Floow. FloowScore, Driver Scoring. 2019. Available online: https://www.thefloow.com/what-we-do/ (accessed on 6 June 2019).
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar]
- Esteva, A.; Kuprel, B.; Novoa, R.A.; Ko, J.; Swetter, S.M.; Blau, H.M.; Thrun, S. Dermatologist-level classification of skin cancer with deep neural networks. Nature 2017, 542, 115. [Google Scholar] [PubMed]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–28 July 2016; pp. 2818–2826. [Google Scholar]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar]
- Google LLC. Advanced Guide to Inception v3 on Cloud TPU. Available online: https://cloud.google.com/tpu/docs/inception-v3-advanced (accessed on 6 June 2019).
- Hancock, M.F., Jr. Practical Data Mining; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Helene Bischel, S. El método de la entropía cruzada. Algunas Aplicaciones 2015. Available online: http://repositorio.ual.es/handle/10835/3322 (accessed on 6 June 2019).
- Zanella-Calzada, L.; Galván-Tejada, C.; Chávez-Lamas, N.; Rivas-Gutierrez, J.; Magallanes-Quintanar, R.; Celaya-Padilla, J.; Galván-Tejada, J.; Gamboa-Rosales, H. Deep Artificial Neural Networks for the Diagnostic of Caries Using Socioeconomic and Nutritional Features as Determinants: Data from NHANES 2013–2014. Bioengineering 2018, 5, 47. [Google Scholar]
- Saxe, J.; Berlin, K. Deep neural network based malware detection using two dimensional binary program features. In Proceedings of the 2015 10th International Conference on Malicious and Unwanted Software (MALWARE), Fajardo, Puerto Rico, 20–22 October 2015; pp. 11–20. [Google Scholar]
- Nye, M.; Saxe, A. Are Efficient Deep Representations Learnable? arXiv 2018, arXiv:1807.06399. [Google Scholar]
- Lobo, J.M.; Jiménez-Valverde, A.; Real, R. AUC: a misleading measure of the performance of predictive distribution models. Glob. Ecol. Biogeogr. 2008, 17, 145–151. [Google Scholar]
- Hanley, J.A.; McNeil, B.J. The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 1982, 143, 29–36. [Google Scholar] [PubMed]
- Fleiss, J.L.; Cohen, J. The equivalence of weighted kappa and the intraclass correlation coefficient as measures of reliability. Educ. Psychol. Meas. 1973, 33, 613–619. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Day | Night | |||||||
|---|---|---|---|---|---|---|---|---|
| Dataset ID | Vehicle | Subject | Cellphone Model | Distracted | Non Distracted | Distracted | Non Distracted | Total |
| ID1 | Honda HR-V 2017 | Az | Xiaomi redmi 5a | 1707 | 5451 | 2755 | 4394 | 14,307 |
| ID1 | Honda HR-V 2017 | Fa | Motorola X Play | 1885 | 5260 | 1952 | 5239 | 14,336 |
| ID1 | Honda HR-V 2017 | Je | Alcatel pop 5 | 1312 | 5763 | 1236 | 5833 | 14,144 |
| ID1 | Honda HR-V 2017 | Jo | Huawei P20 Light | 2453 | 4446 | 683 | 6471 | 14,053 |
| ID2 | VW Golf 2016 | Ja | Moto G5 plus | 1222 | 5975 | 1057 | 5842 | 14,096 |
| ID2 | VW Golf 2016 | va | Motorola moto g5 plus | 2006 | 5207 | 2355 | 4897 | 14,465 |
| Total = | 85,401 | |||||||
| Approach | Research Objective | Description | Performance |
|---|---|---|---|
| Our Approach | Distracted Drivers (Texting and driving) | Computer vision & Convolutional Neural Network | 92.8% Accuracy |
| The SmartSense [12] | Distracted Drivers through head and eye movements | Computer vision & Telematics | Non Disclosed |
| TEXIVE [17] | Distracted Drivers (Texting and driving) | Phone based, Inertial Sensors, No Crossvalidation | Accuracy |
| Chu et al. [18] | Passanger or Driver Detection | Smartphone sensors, SVM classifier | Accuracy |
| Mantouka et al. [19] | Aggressive driver detection | Smartphone, K-means to detect aggressive driving | Non Disclosed |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Celaya-Padilla, J.M.; Galván-Tejada, C.E.; Lozano-Aguilar, J.S.A.; Zanella-Calzada, L.A.; Luna-García, H.; Galván-Tejada, J.I.; Gamboa-Rosales, N.K.; Velez Rodriguez, A.; Gamboa-Rosales, H. “Texting & Driving” Detection Using Deep Convolutional Neural Networks. Appl. Sci. 2019, 9, 2962. https://doi.org/10.3390/app9152962
Celaya-Padilla JM, Galván-Tejada CE, Lozano-Aguilar JSA, Zanella-Calzada LA, Luna-García H, Galván-Tejada JI, Gamboa-Rosales NK, Velez Rodriguez A, Gamboa-Rosales H. “Texting & Driving” Detection Using Deep Convolutional Neural Networks. Applied Sciences. 2019; 9(15):2962. https://doi.org/10.3390/app9152962
Chicago/Turabian StyleCelaya-Padilla, José María, Carlos Eric Galván-Tejada, Joyce Selene Anaid Lozano-Aguilar, Laura Alejandra Zanella-Calzada, Huizilopoztli Luna-García, Jorge Issac Galván-Tejada, Nadia Karina Gamboa-Rosales, Alberto Velez Rodriguez, and Hamurabi Gamboa-Rosales. 2019. "“Texting & Driving” Detection Using Deep Convolutional Neural Networks" Applied Sciences 9, no. 15: 2962. https://doi.org/10.3390/app9152962
APA StyleCelaya-Padilla, J. M., Galván-Tejada, C. E., Lozano-Aguilar, J. S. A., Zanella-Calzada, L. A., Luna-García, H., Galván-Tejada, J. I., Gamboa-Rosales, N. K., Velez Rodriguez, A., & Gamboa-Rosales, H. (2019). “Texting & Driving” Detection Using Deep Convolutional Neural Networks. Applied Sciences, 9(15), 2962. https://doi.org/10.3390/app9152962