Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot


Abstract
:1. Introduction
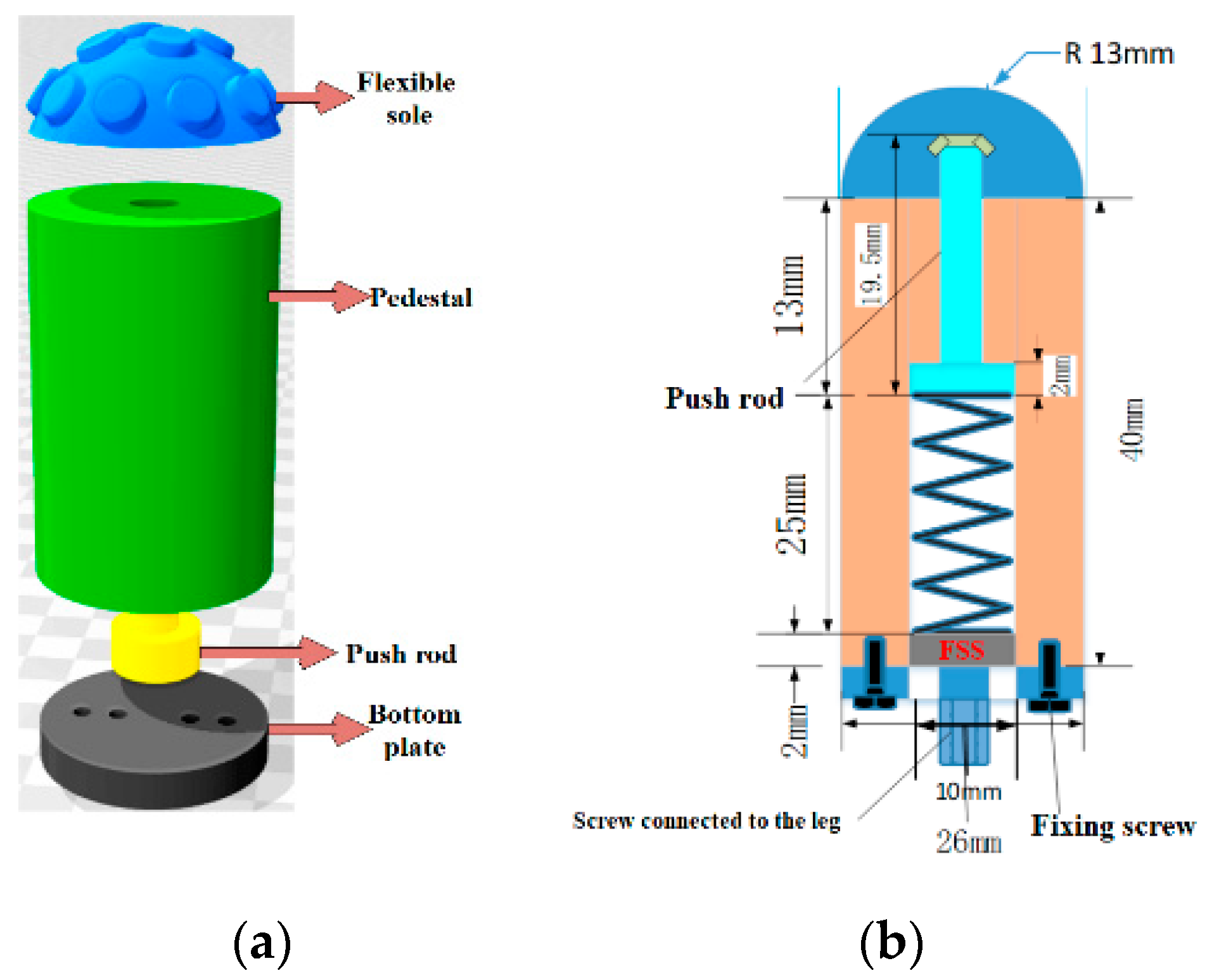
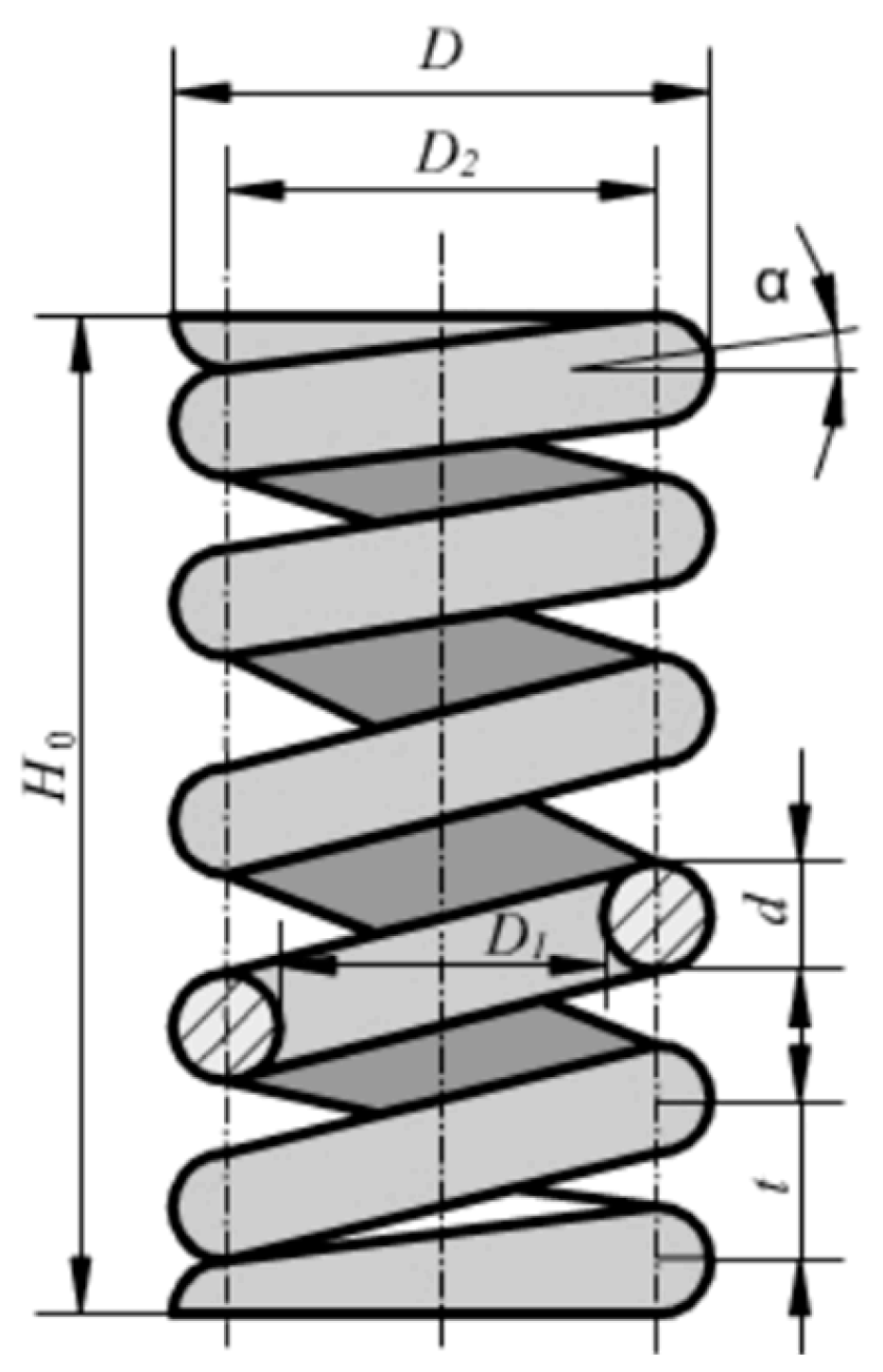
2. Flexible Foot Mechanism Design
- Spring wire diameter D:
- Elastic coefficient K, effective number of turns N:
- Total number of laps:
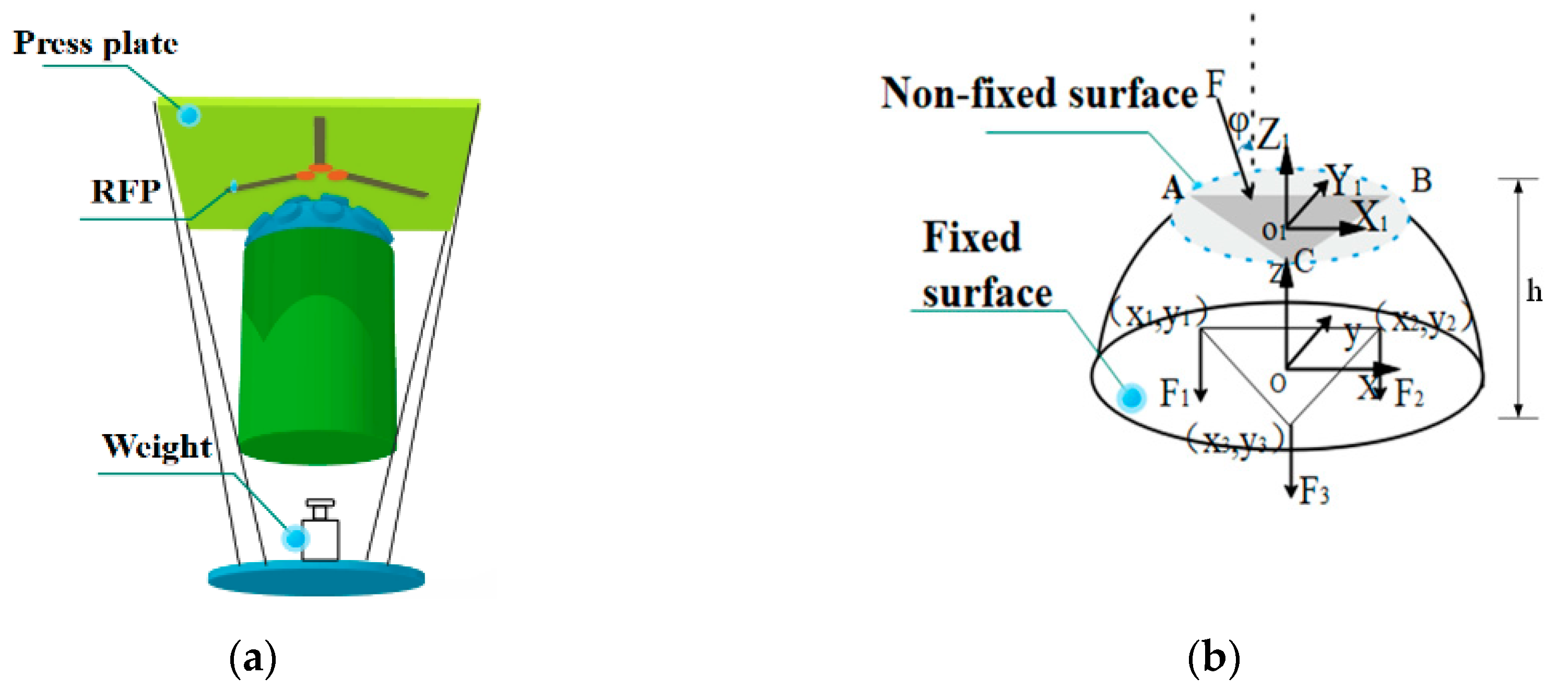
3. Analysis of Mechanical Properties of the Foot End
Foot Force Analysis
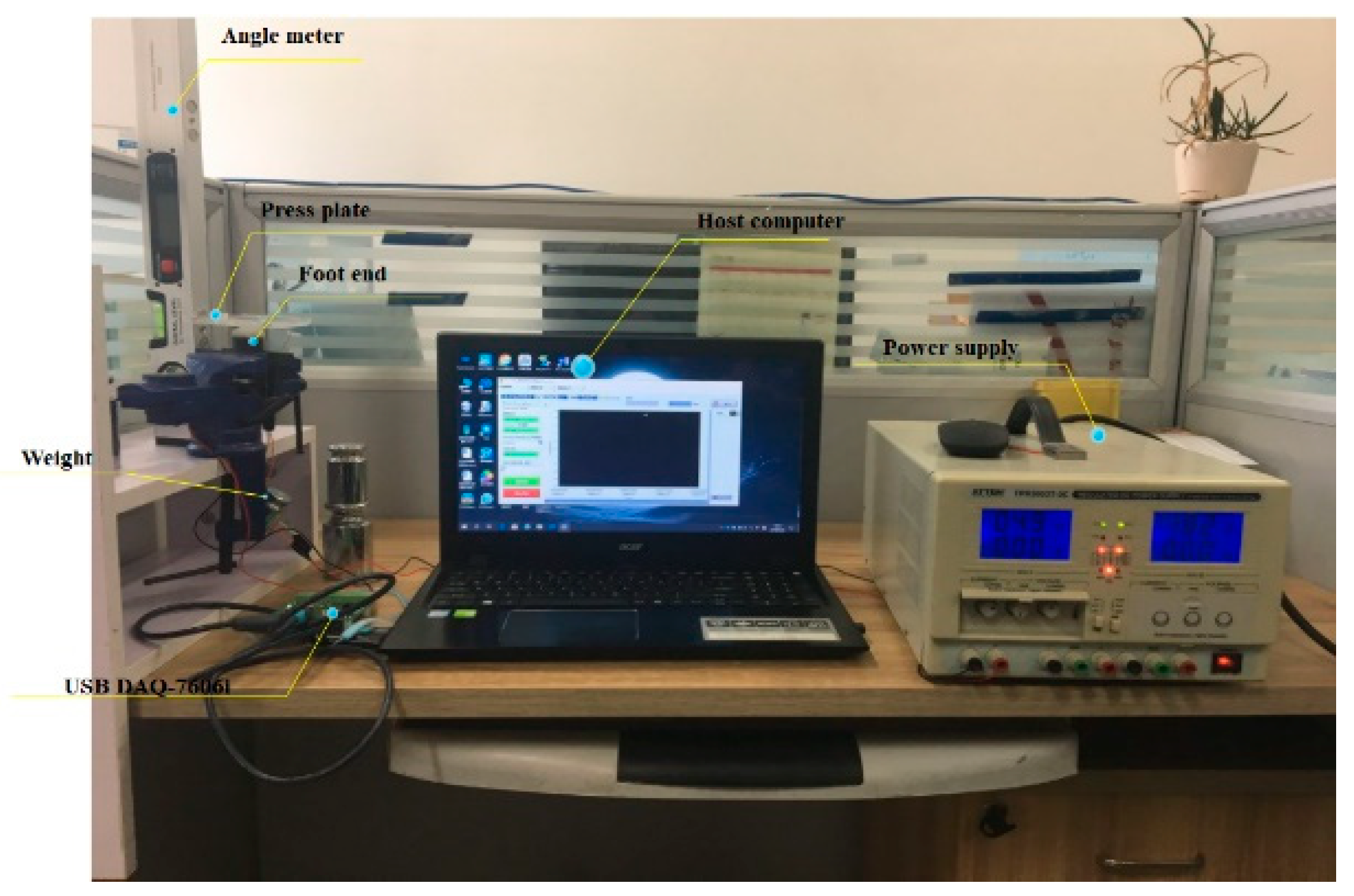
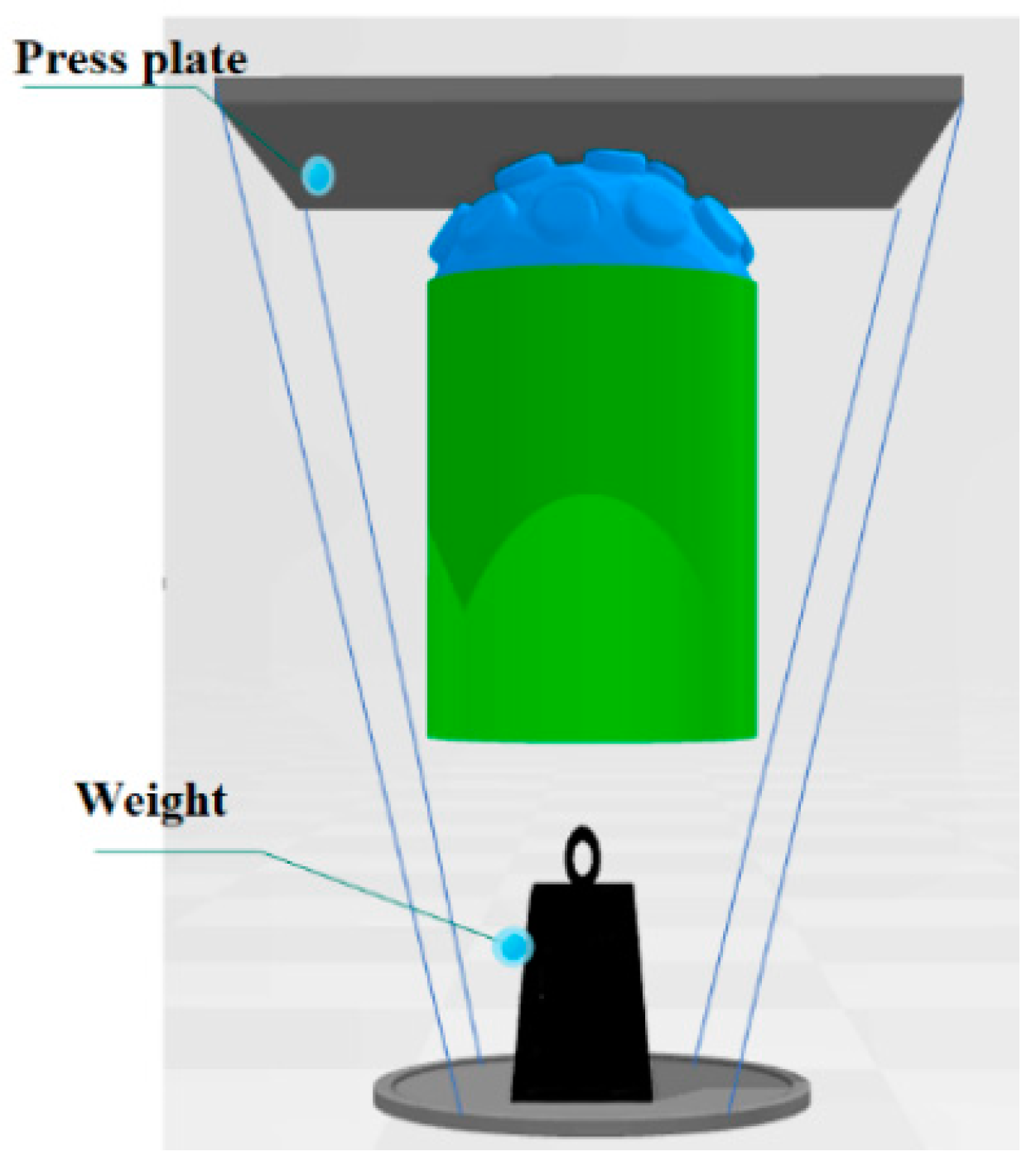
4. Flexible Foot Mechanism Calibration
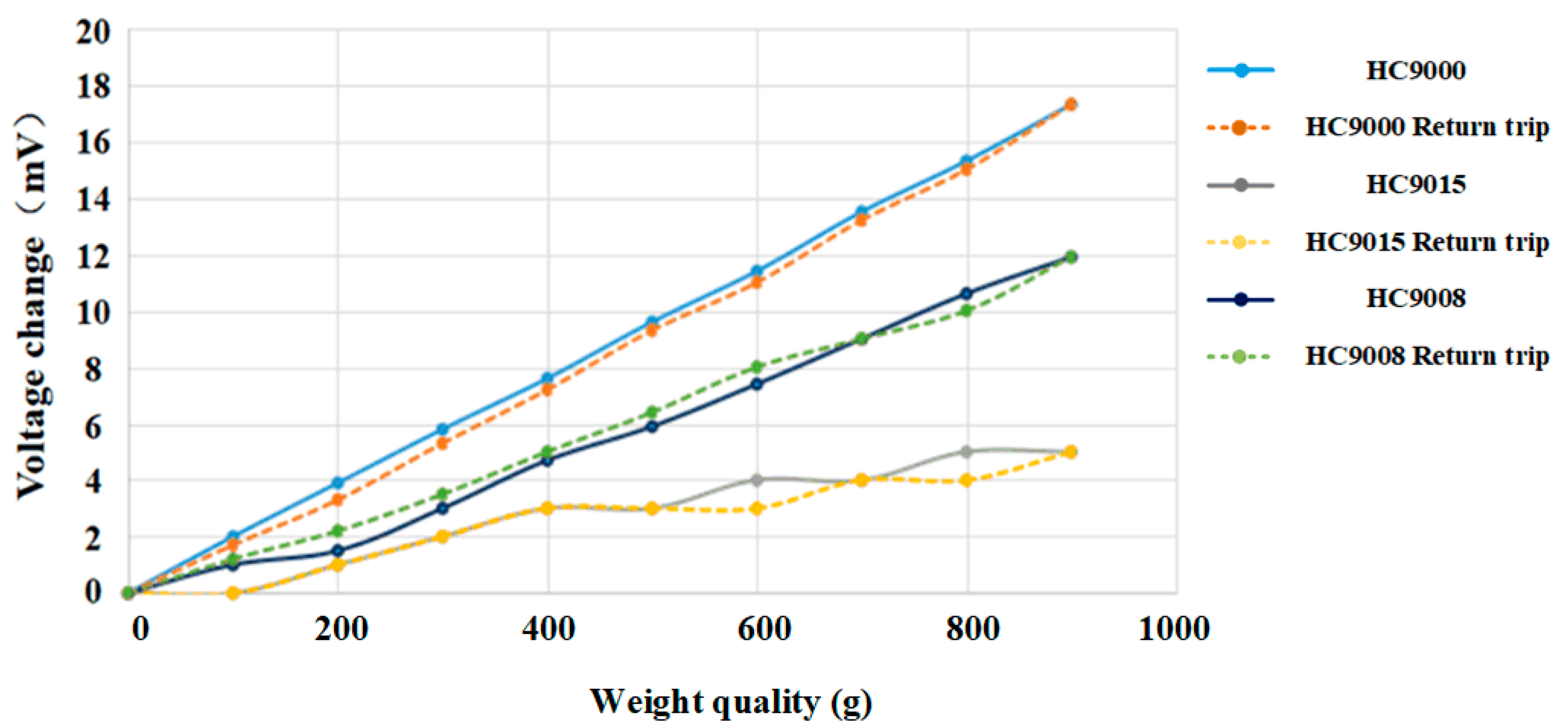
4.1. Different Flexible Materials Foot Force Calibration
- When pressure was applied to the HC9000 material,
- When pressure was applied to the HC9008 material,
- When the pressure was applied to the HC9015 material, the relationship was not obvious.
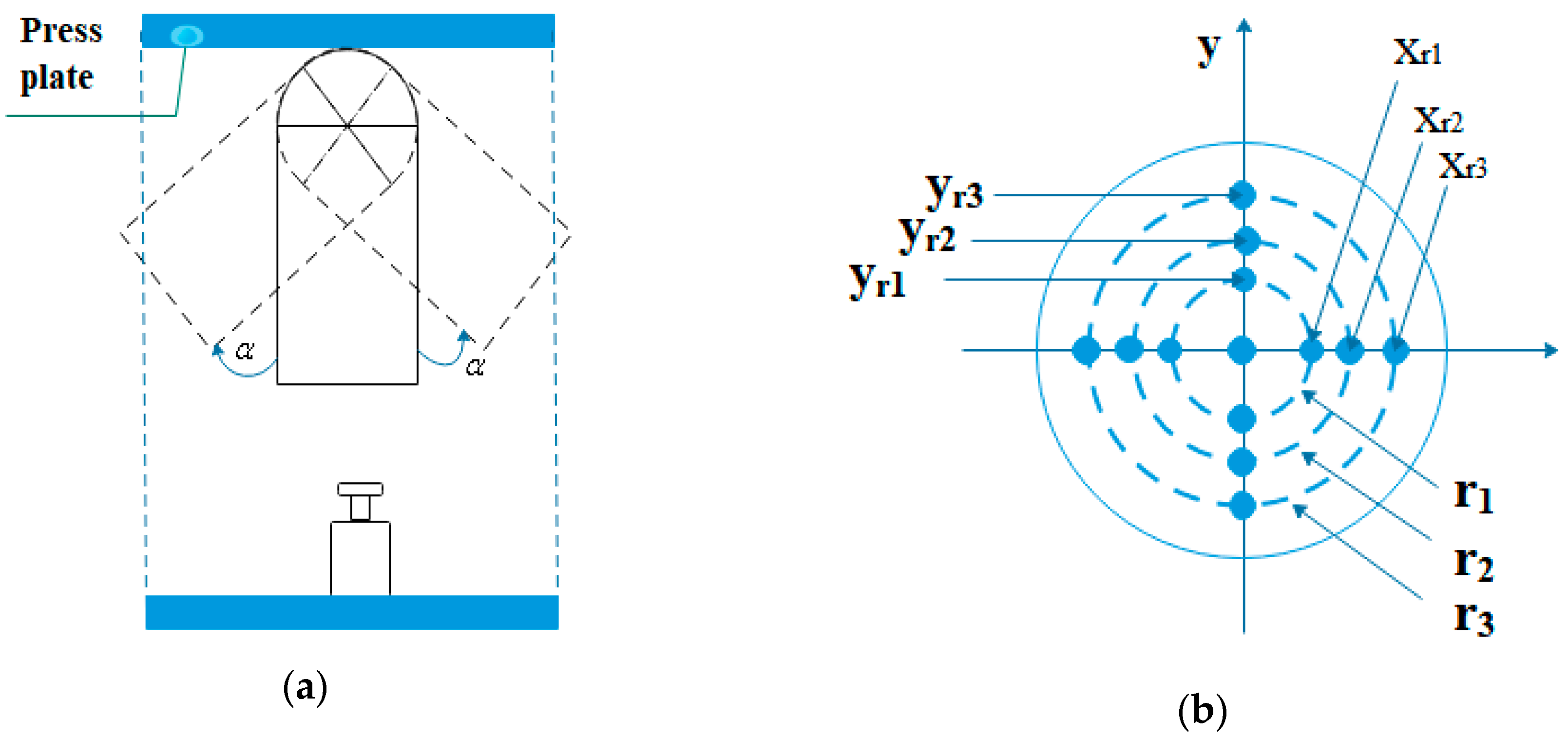
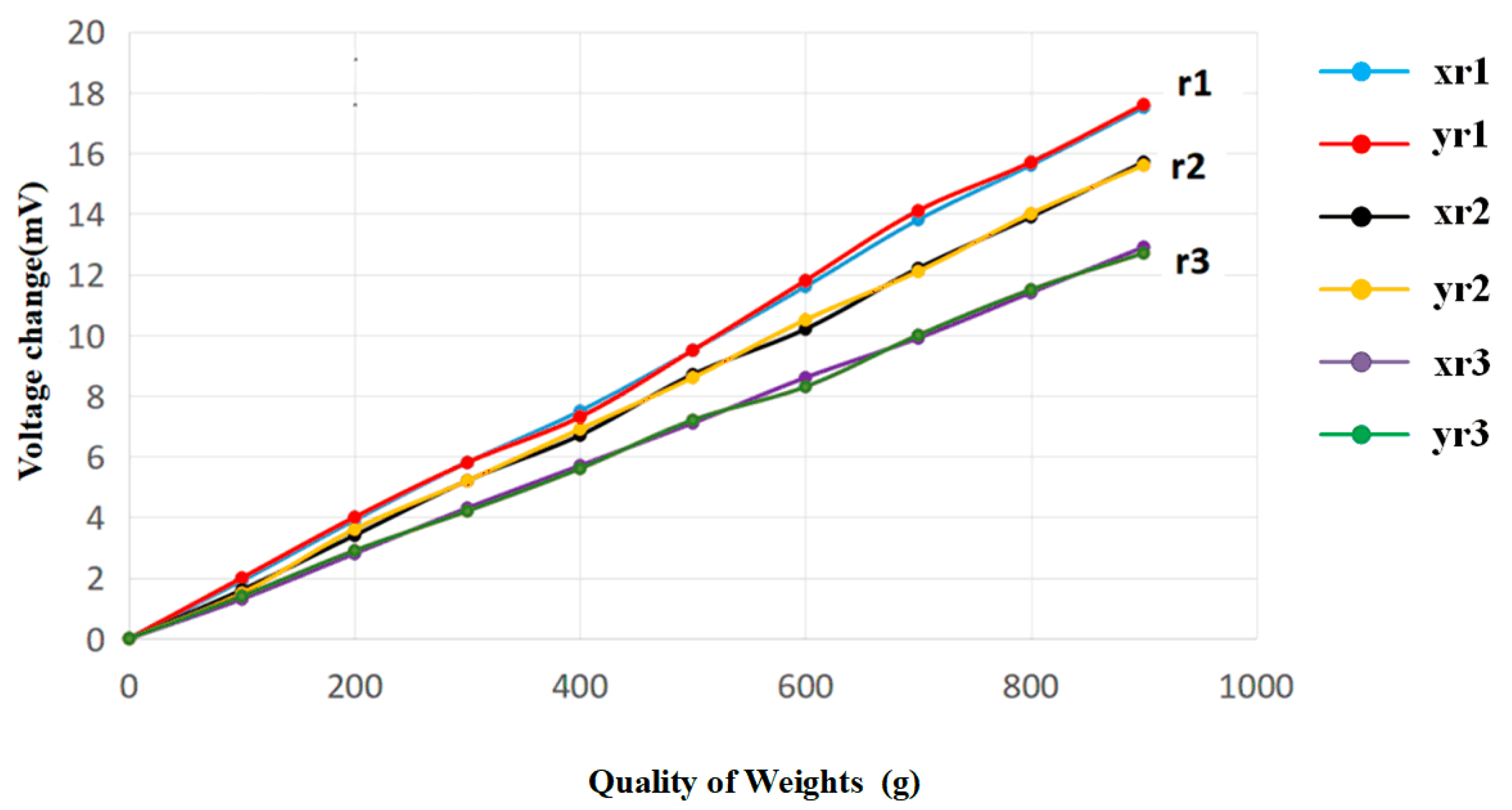
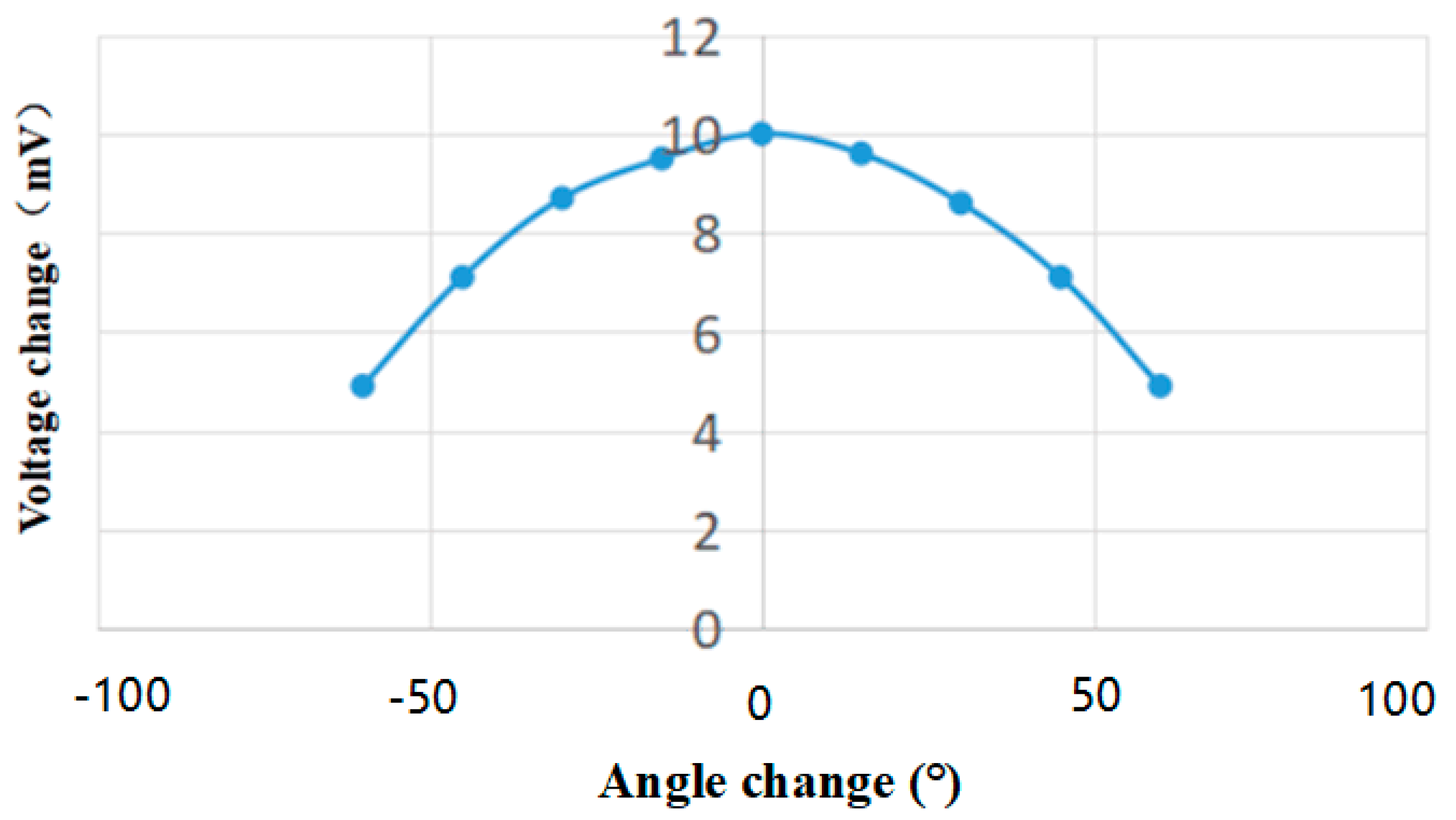
4.2. Omnidirectional Force Calibration
- When r1 was deflected by 15 degrees, the fitted straight line was
- When r2 was deflected by 30 degrees, the fitted straight line was
- When r3 was deflected by 45 degrees, the fitted straight line was
5. Prototype Experiments and Results Analysis
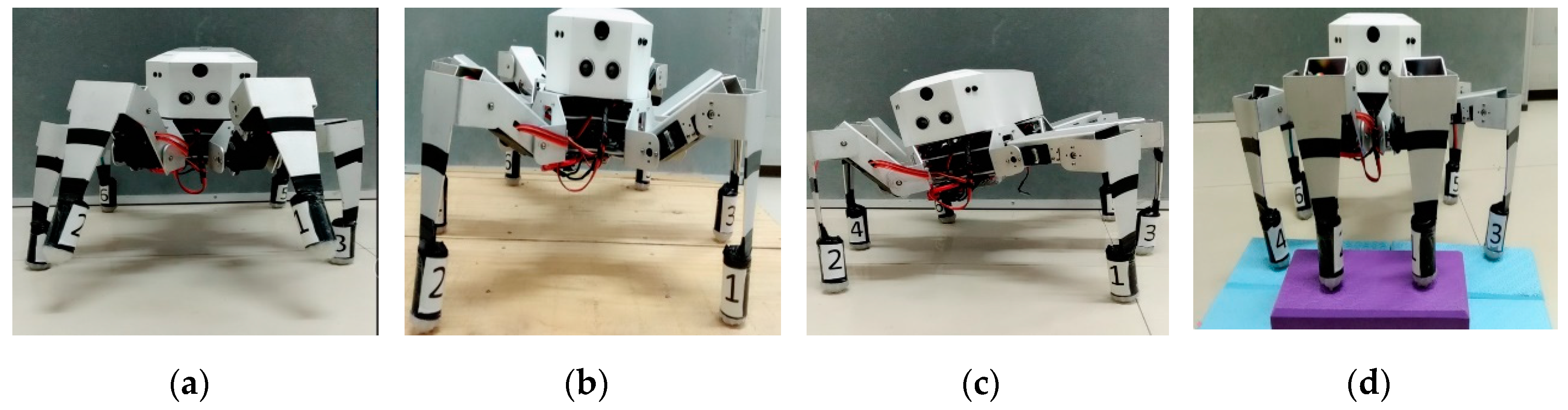
5.1. Robot Static Attitude Test
5.2. Omnidirectional Force Calibration
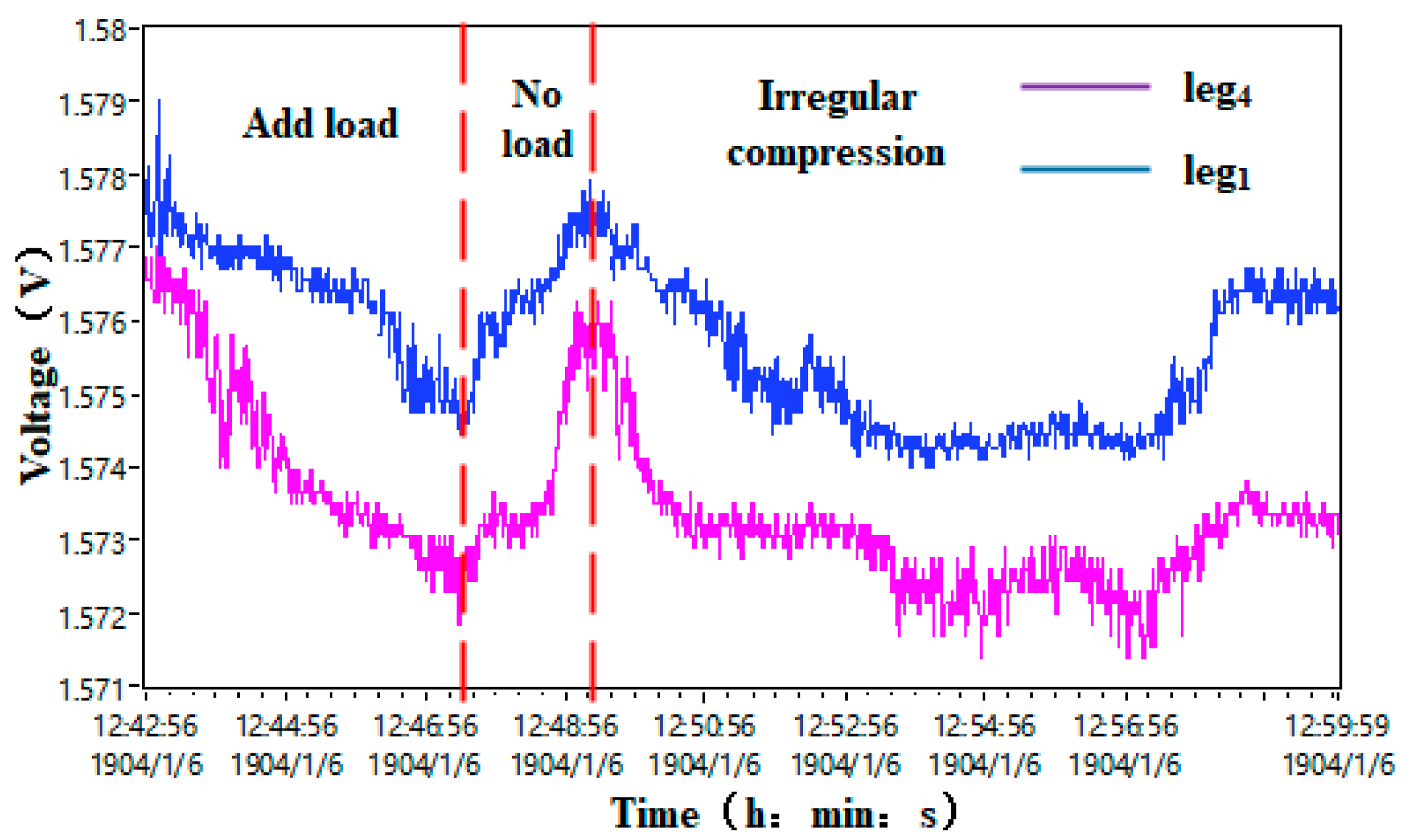
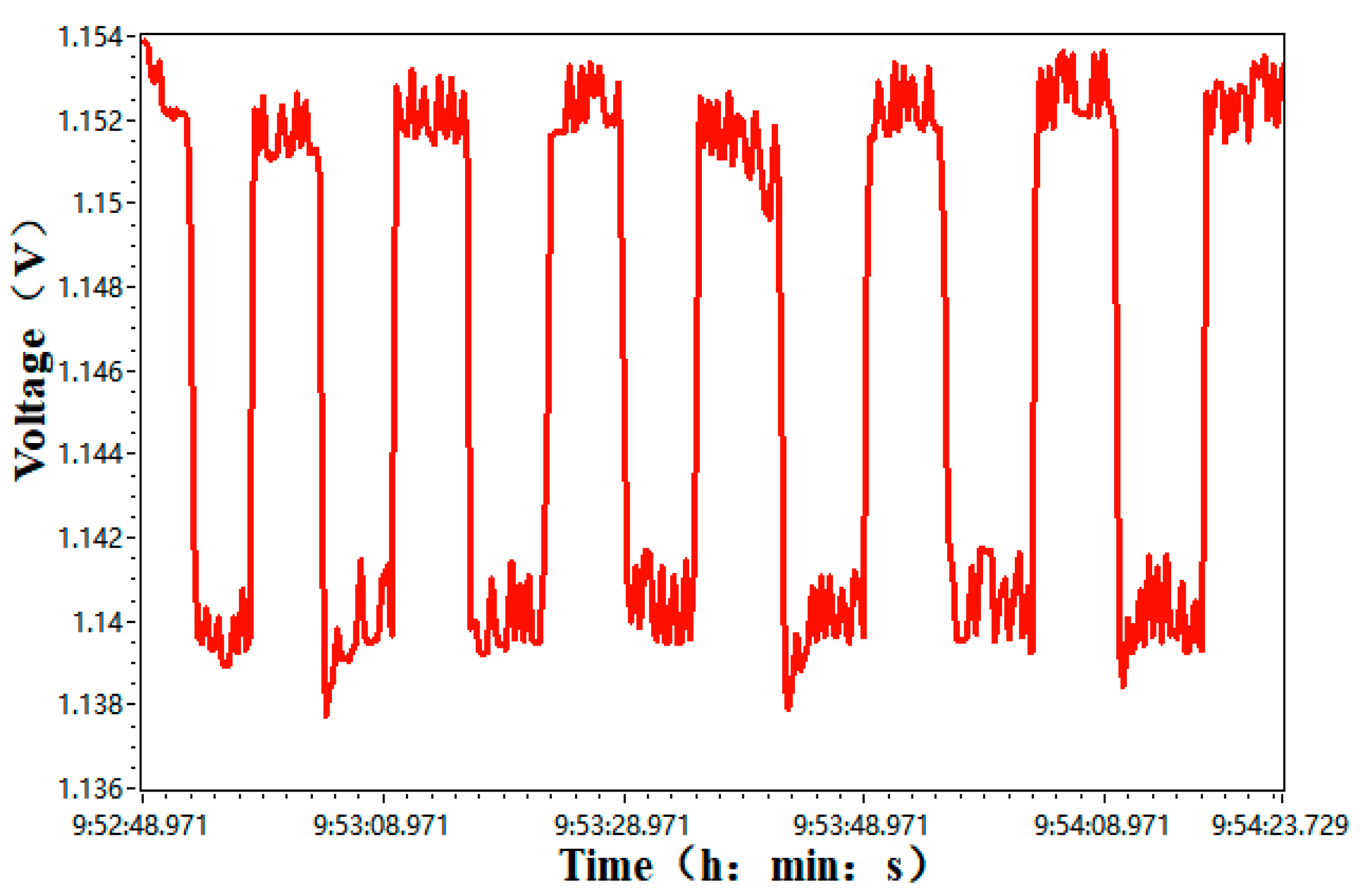
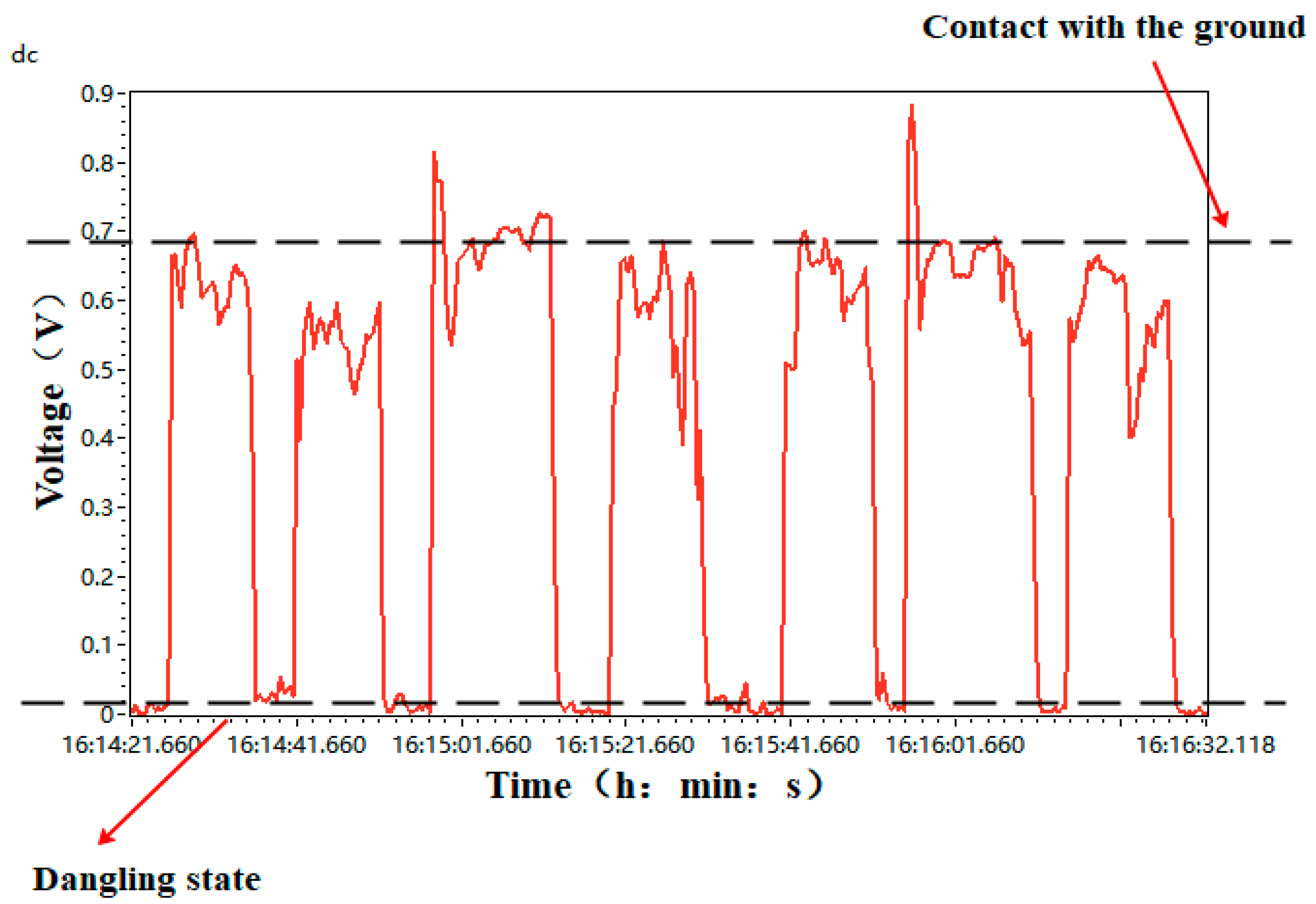
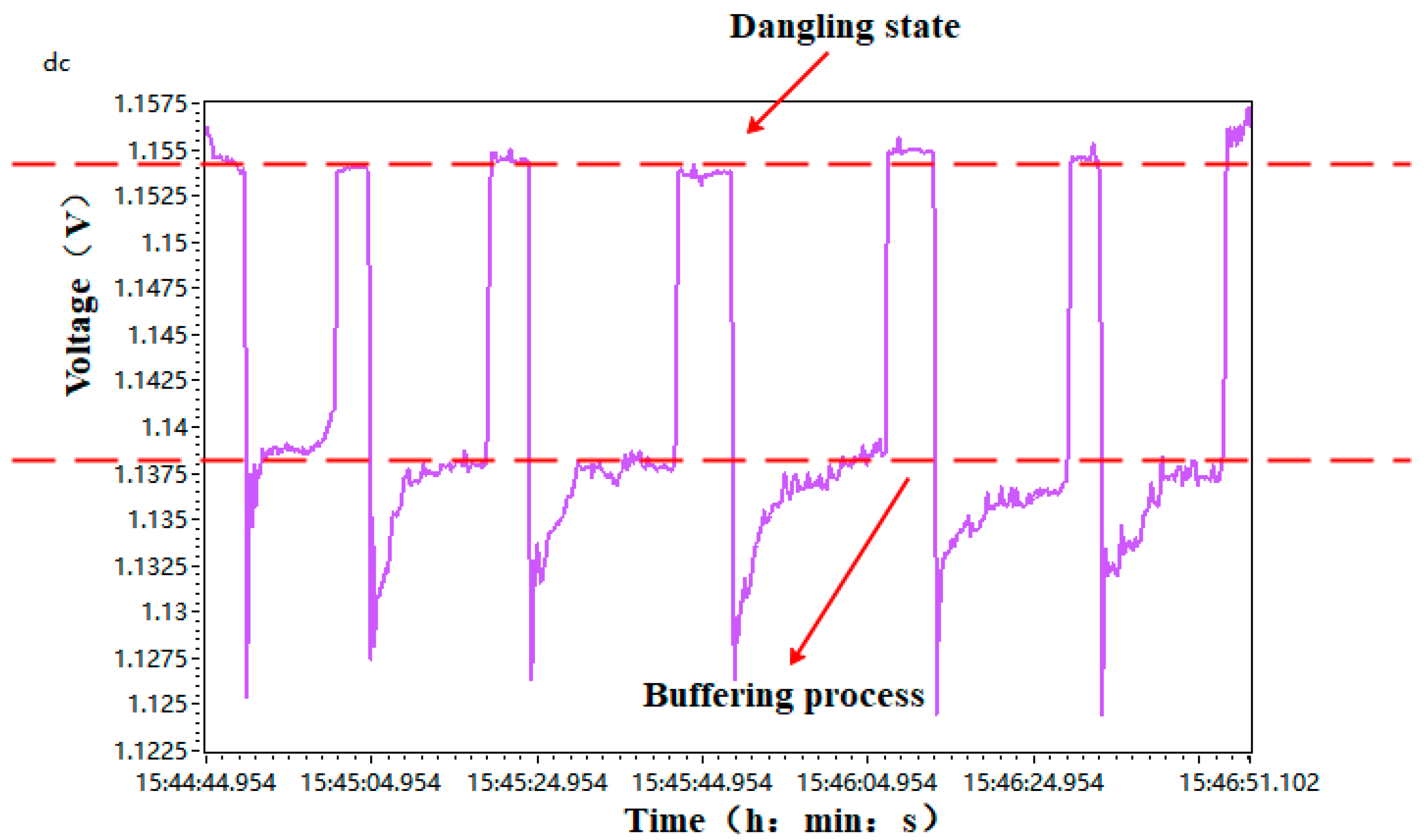
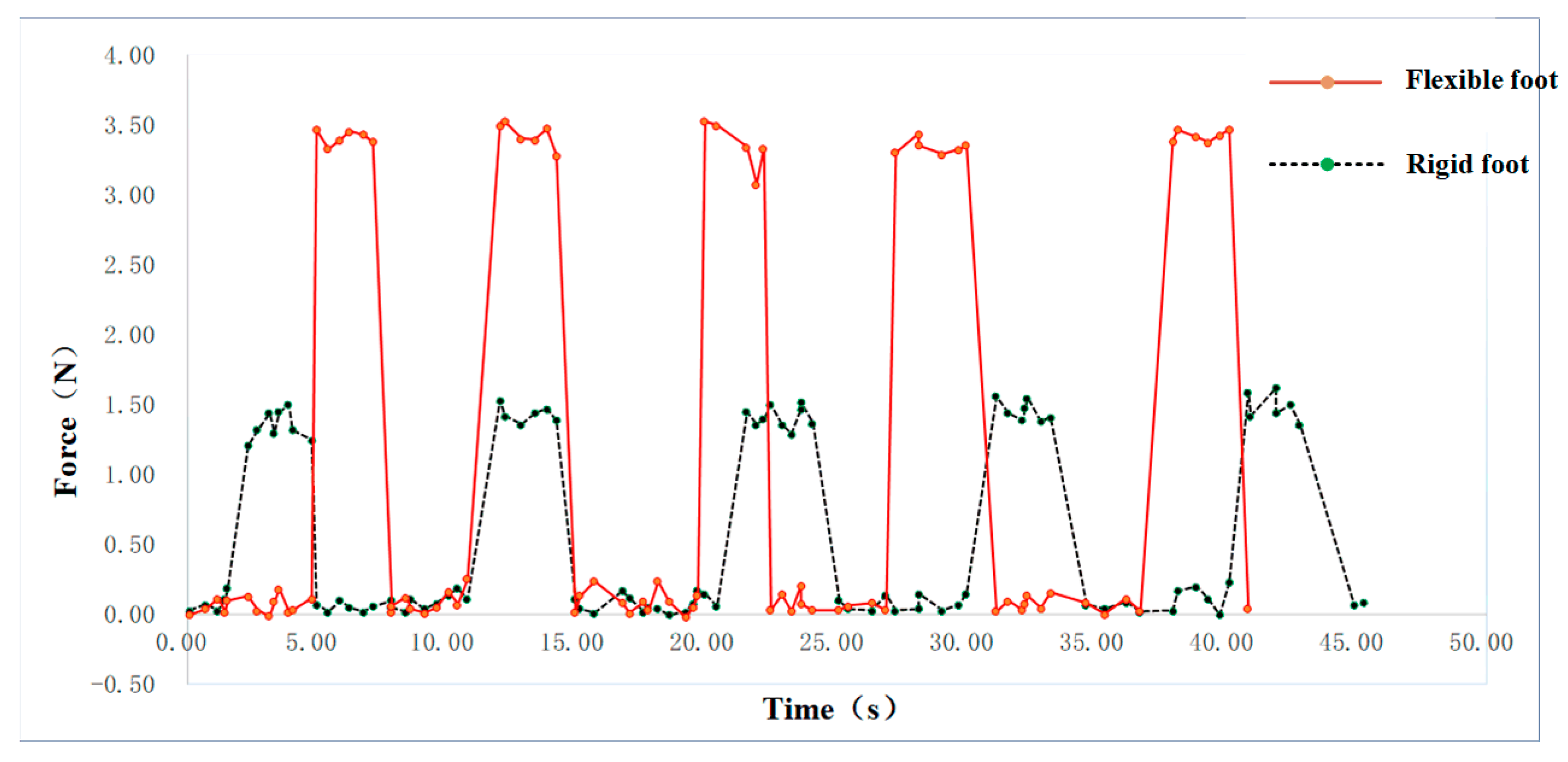
5.2.1. Foot-Tip Force Perception Experiment
5.2.2. Comparison Test of Impact Resistance
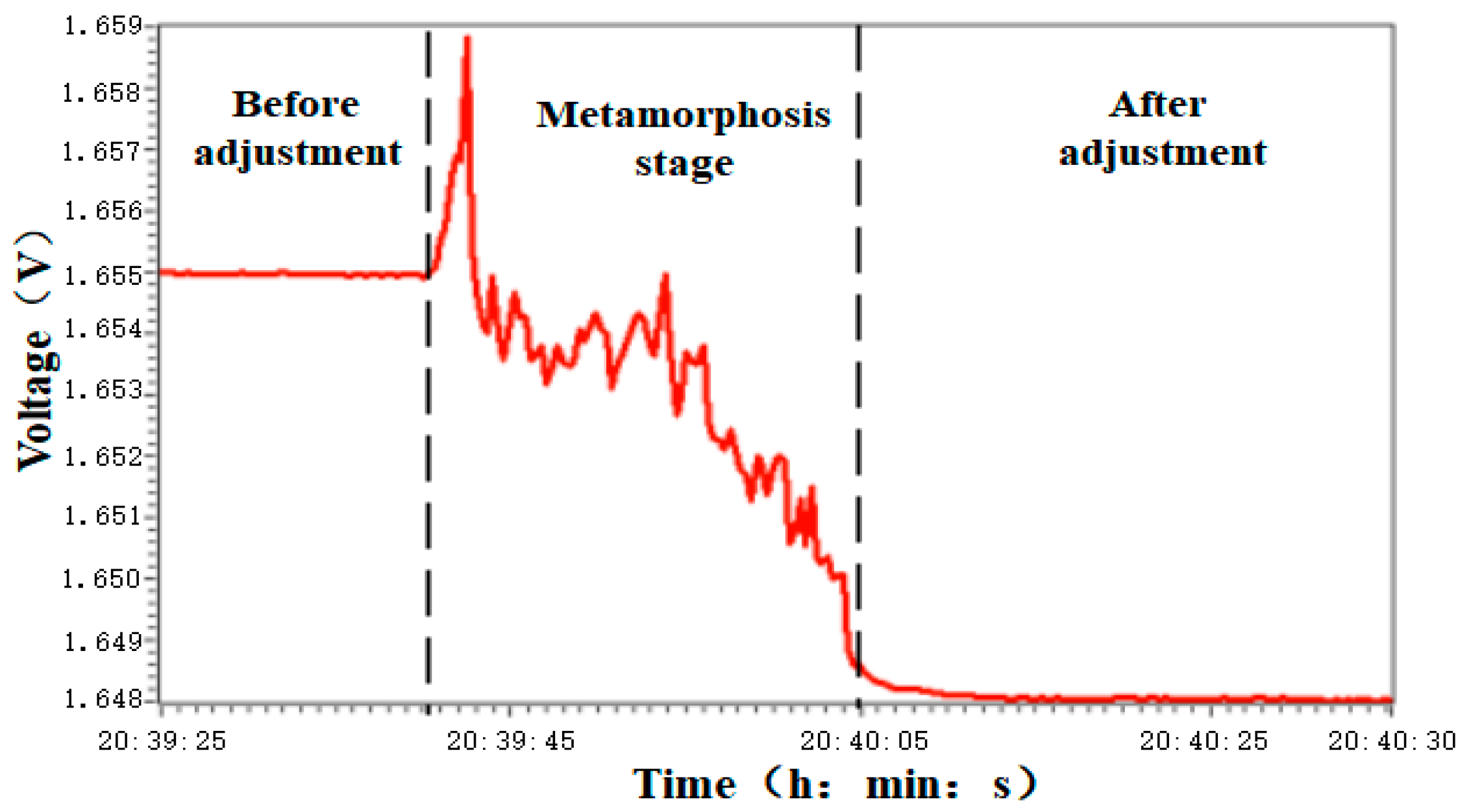
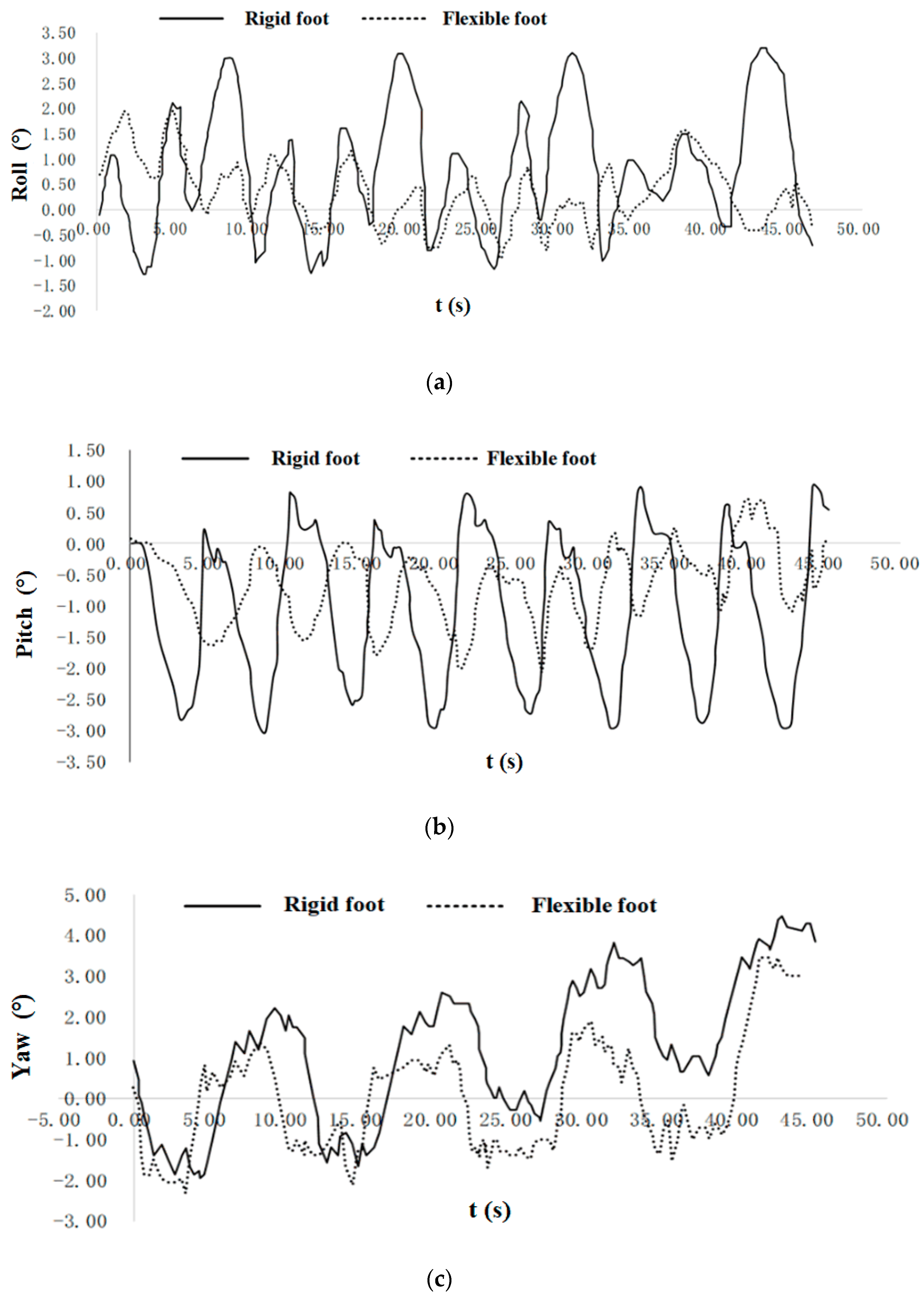
5.2.3. Influence and Evaluation of Flexible Foot on Exercise Effect
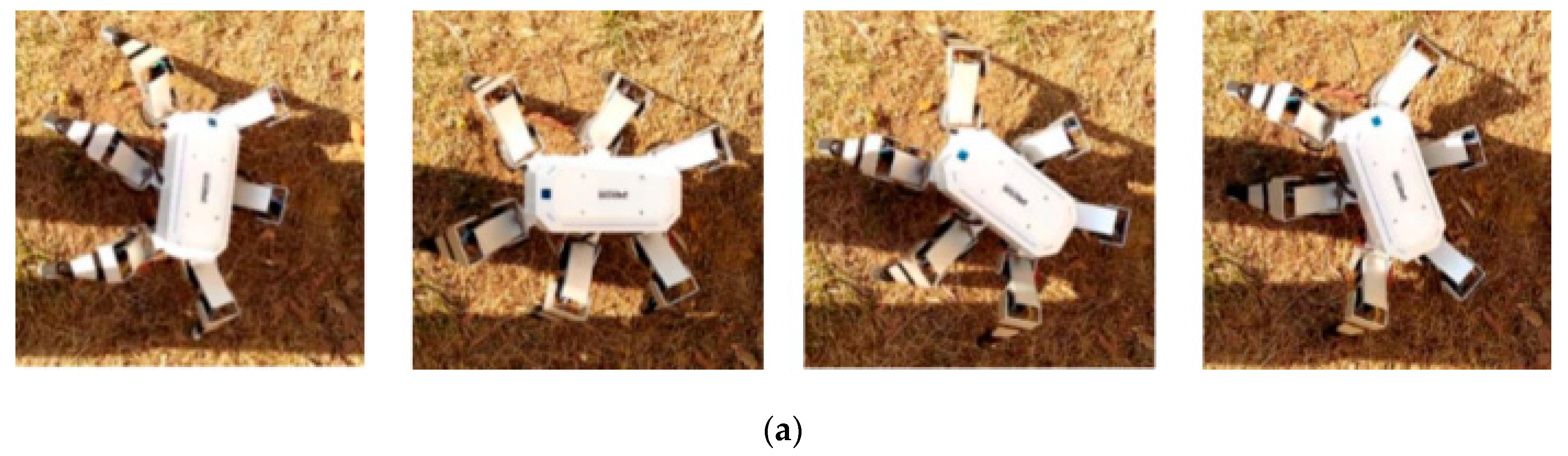
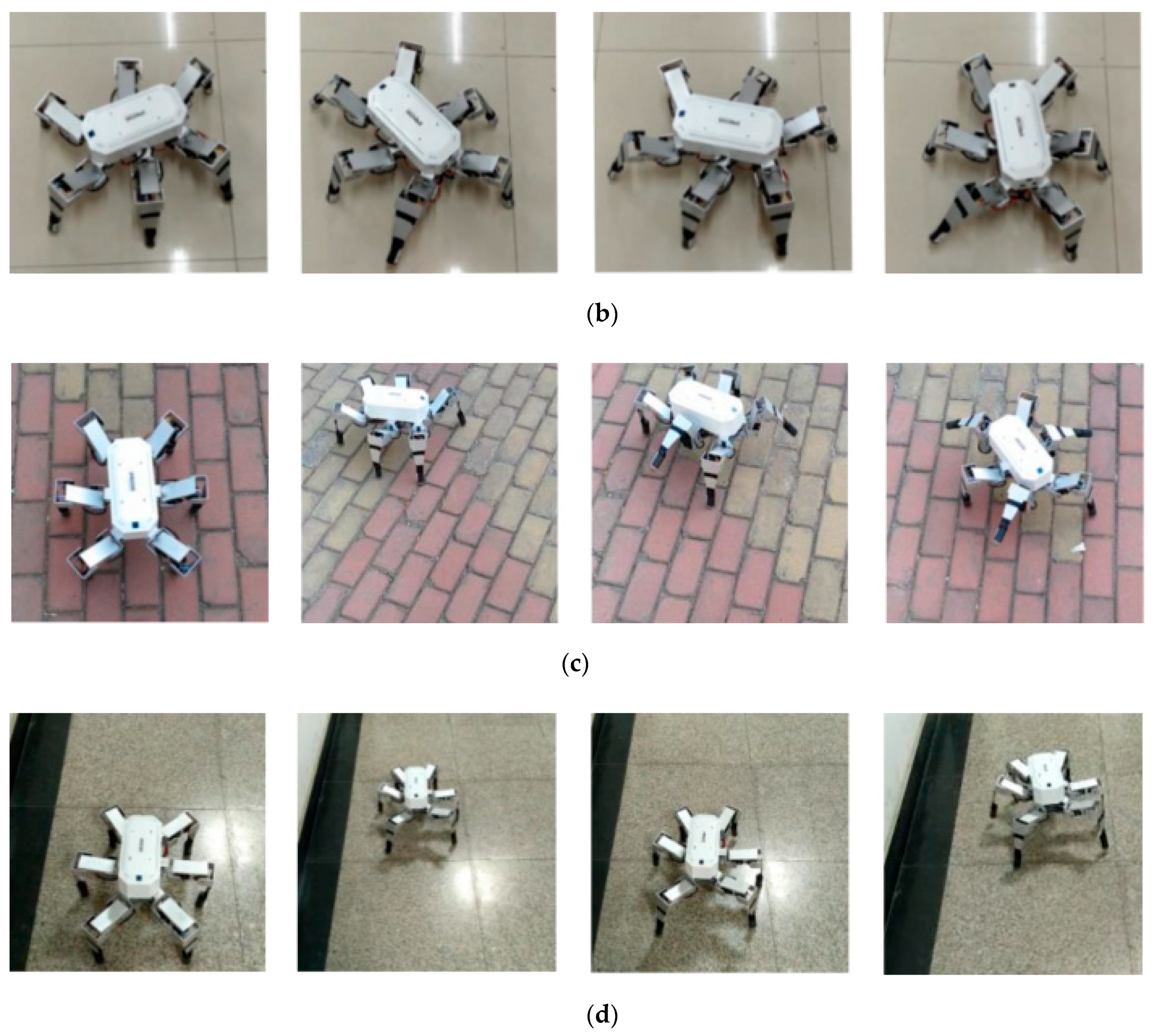
5.2.4. Walking Experiments on Different Ground Surfaces
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Billah, M.M.; Ahmed, M.; Farhana, S. Walking hexapod robot in disaster recovery: Developing algorithm for terrain negotiation and navigation. Proc. World Acad. Sci. Eng. Technol. 2008, 42, 328–333. [Google Scholar]
- Huang, Q.J.; Nonami, K. Humanitarian mine detecting six–legged walking robot and hybrid neuro walking control with position/force control. Mechatronics 2003, 13, 773–790. [Google Scholar] [CrossRef]
- Shi, Y.; Ding, G.; Zhang, M.; Zhang, X. Foot end trajectory with small oscillation generation method of the adjustable stiffness active flexible joint robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; pp. 455–460. [Google Scholar]
- Low, K.H.; Yang, A. Design and foot contact of a leg mechanism with a flexible gear system. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 324–329. [Google Scholar]
- Fan Jihua, Z.G.; Hong, C. Dynamic analysis and simulation of robot considering joint flexibility. Comput. Simul. 2017, 8, 331–336. [Google Scholar]
- Wen, L.; Wang, H. Software robot research outlook: Structure, drive and control. Robot 2018, 40, 577. [Google Scholar]
- Zhang, L.; Liu, X.; Guo, X. Development of Hexapod Robot with one passive joint on foot. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 1082–1087. [Google Scholar]
- Yanlei, S.; Minglu, Z.; Xiaojun, Z. Design and analysis of four-legged mechanical legs with flexible joints. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2017, 40, 3. [Google Scholar]
- Bingbing, H.; Guoqing, J. Design and manufacture of a multi-drive software robot that resembles the tiger larvae. Robot 2018, 40, 626–633. [Google Scholar]
- Howe, R.D. Tactile sensing and control of robotic manipulation. Adv. Robot. 1993, 8, 245–261. [Google Scholar] [CrossRef]
- Haoyu, R.; Qimin, L.; Jianxin, J. Design and analysis of the leg structure of a new type of elastic foot robot. Mech. Sci. Technol. 2018, 37, 372–379. [Google Scholar]
- Galloway, K.C.; Clark, J.E.; Koditschek, D.E. Variable stiffness legs for robust, efficient, and stable dynamic running. J. Mech. Robot. 2013, 5, 011009. [Google Scholar] [CrossRef]
- Hamill, S.; Peele, B.; Ferenz, P.; Westwater, M.; Shepherd, R.F.; Kress-Gazit, H. Gait Synthesis for Modular Soft Robots. In Proceedings of the International Symposium on Experimental Robotics, Tokyo, Japan, 3–6 October 2016; pp. 669–678. [Google Scholar]
- Xiang, G. Research on State Recognition and Control of Software Crawling Robot; Harbin Institute of Technology: Harbin, China, 2018. [Google Scholar]
- Yibin, L.; Bin, L.; Xuewen, R.; Jian, M. Structural design and gait planning for hydraulically driven four-legged bionic robots. J. Shandong Univ. (Eng. Ed.) 2011, 41, 32–36. [Google Scholar]
- Chai Hui, M.J.; Xuewen, R. Design and implementation of high–performance hydraulically driven quadruped robot SCalf. Robot 2014, 36, 385–391. [Google Scholar]
- Riese, S.; Seyfarth, A. Stance leg control: Variation of leg parameters supports stable hopping. Bioinspir. Biomim. 2011, 7, 016006. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Guo, J.; Sun, C.; Xu, M.; Zhang, Y. A flexible concept for designing multiaxis force/torque sensorsusing force closure theorem. IEEE Trans. Instrum. Meas. 2013, 62, 1951–1959. [Google Scholar] [CrossRef]
- Wang, X.; Li, M.; Wang, P.; Sun, L. Running and turning control of a quadruped robot with compliant legs in bounding gait. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 511–518. [Google Scholar]
- Zhang, X.; Ye, T.; Zhu, J.; She, H.; Xin, L.; Sun, W. A novel self-adaptive bionic robot hand with flexible fingers. In Proceedings of the IEEE International Conference on Robotics & Biomimetics, Macau, China, 5–8 December 2017. [Google Scholar]
- Liu, Z.; Song, L.-B.; Li, Y.; Pan, B.-Z. Rigid-Flexible Coupling Simulation and Vibration Analysis of Flexible Robot. In Proceedings of the International Conference on Mechanical, Automotive and Materials Engineering, Guangzhou, China, 1–3 August 2017. [Google Scholar]
- Kand, M.S.T.; Sadeghian, R.; Masouleh, M.T. Design, analysis and construction of a novel flexible rover robot. In Proceedings of the RSI International Conference on Robotics & Mechatronics, Tehran, Iran, 7–9 October 2015. [Google Scholar]
- Sun, W.; Su, S.F.; Xia, J.; Nguyen, V.T. Adaptive Fuzzy Tracking Control of Flexible-Joint Robots with Full-State Constraints. IEEE Trans. Syst. Man Cybern. Syst. 2018. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive Fuzzy Tracking Control of Flexible–Joint Robots Based on Command Filtering. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Ding, K.; Song, G.; Qiao, G. Multi-footed bionic robot foot mechanism design with 3D force perception. Robot 2016, 38, 75–81. [Google Scholar]
- Castaño, F.; Toro, R.M.D.; Haber, R.E.; Beruvides, G. Conductance sensing for monitoring micromechanical machining of conductive materials. Sens. Actuators A Phys. 2015, 232, 163–171. [Google Scholar] [CrossRef]
- Beruvides, G.; Quiza, R.; del Toro, R.; Castaño, F.; Haber, R.E. Correlation of the holes quality with the force signals in a microdrilling process of a sintered tungsten-copper alloy. Int. J. Precis. Eng. Manuf. 2014, 15, 1801–1808. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol |
|---|---|
| Spring wire diameter | d |
| Outer diameter | D |
| inside diameter | D2 |
| Free height | H0 |
| Pitch | t |
| Spiral angle |
| Parameters | Variation | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Angle (°) | −60 | −45 | −30 | −15 | 0 | 15 | 30 | 45 | 60 |
| Voltage change (mV) | 4.8 | 7.0 | 8.5 | 9.7 | 10 | 9.6 | 8.6 | 6.9 | 4.8 |
| Structure Parameter | Symbol | Values | Unit |
|---|---|---|---|
| length of coxa | l1 | 75 | mm |
| length of femur | l2 | 105 | mm |
| length of tibia | l3 | 145 | mm |
| angle of talocalcaneal joint | −45–45 | ||
| angle of hip join | −45–90 | ||
| angle of keen join | −120–0 | ||
| quality of coxa | 0.042 | kg | |
| quality of femur | 0.044 | kg | |
| quality of tibia | 0.040 | kg | |
| height of center of gravity | H | 50–140 | mm |
| total mass | G | 2.01 | kg |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Liu, X.; Ren, P.; Gao, Z.; Li, A. Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot. Appl. Sci. 2019, 9, 3451. https://doi.org/10.3390/app9173451
Zhang L, Liu X, Ren P, Gao Z, Li A. Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot. Applied Sciences. 2019; 9(17):3451. https://doi.org/10.3390/app9173451
Chicago/Turabian StyleZhang, Lei, Xinzhi Liu, Ping Ren, Zenghui Gao, and Ang Li. 2019. "Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot" Applied Sciences 9, no. 17: 3451. https://doi.org/10.3390/app9173451
APA StyleZhang, L., Liu, X., Ren, P., Gao, Z., & Li, A. (2019). Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot. Applied Sciences, 9(17), 3451. https://doi.org/10.3390/app9173451