The Direct Integration Method with Virtual Initial Conditions on the Free and Forced Vibration of a System with Hysteretic Damping

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Equation of Motion and the Direct Integration Method
3. The Formulation for the Virtual Initial Condition
3.1. The Virtual Initial Condition for Free Vibration
3.2. The Virtual Initial Conditions for Harmonic Force
3.3. The Virtual Initial Conditions for Arbitrary Force
| Algorithm 1 Newmark method with the virtual initial condition for arbitrary force. |
| Step 1.0 Initial calculation |
| 1.1 DFT for g1(t) to calculate coefficients Aj and Bj by Equations (36) and (37). |
| 1.3 |
| 1.4 |
| 1.5 |
| Step 2.0 Calculations for each time step |
| 2.1 |
| Step 3.0 Repetition for the next time step. Replace n by n + 1 and implement step 2.1 to 2.6 for next time step. |
4. Example Case Study
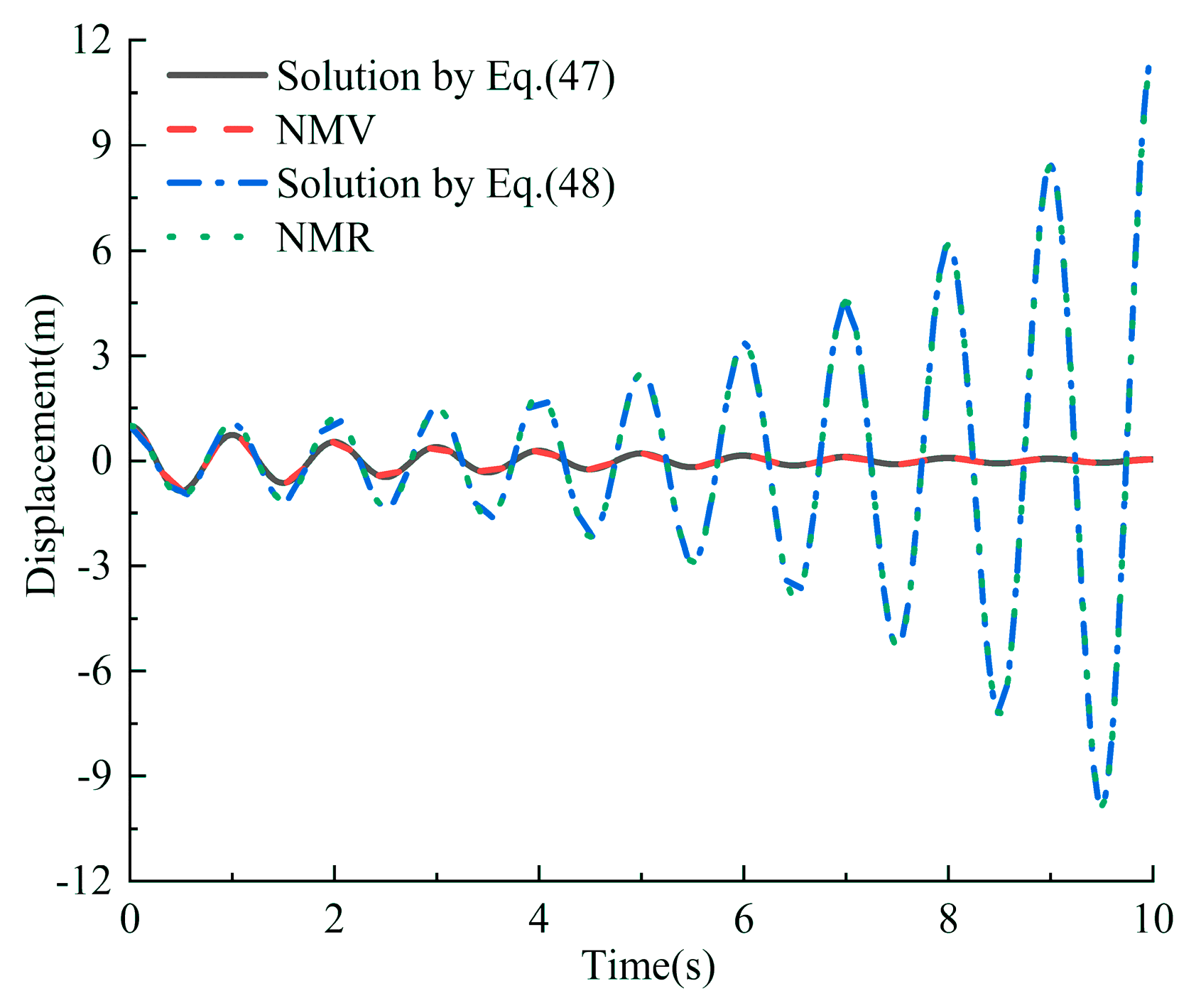
4.1. Free Vibration
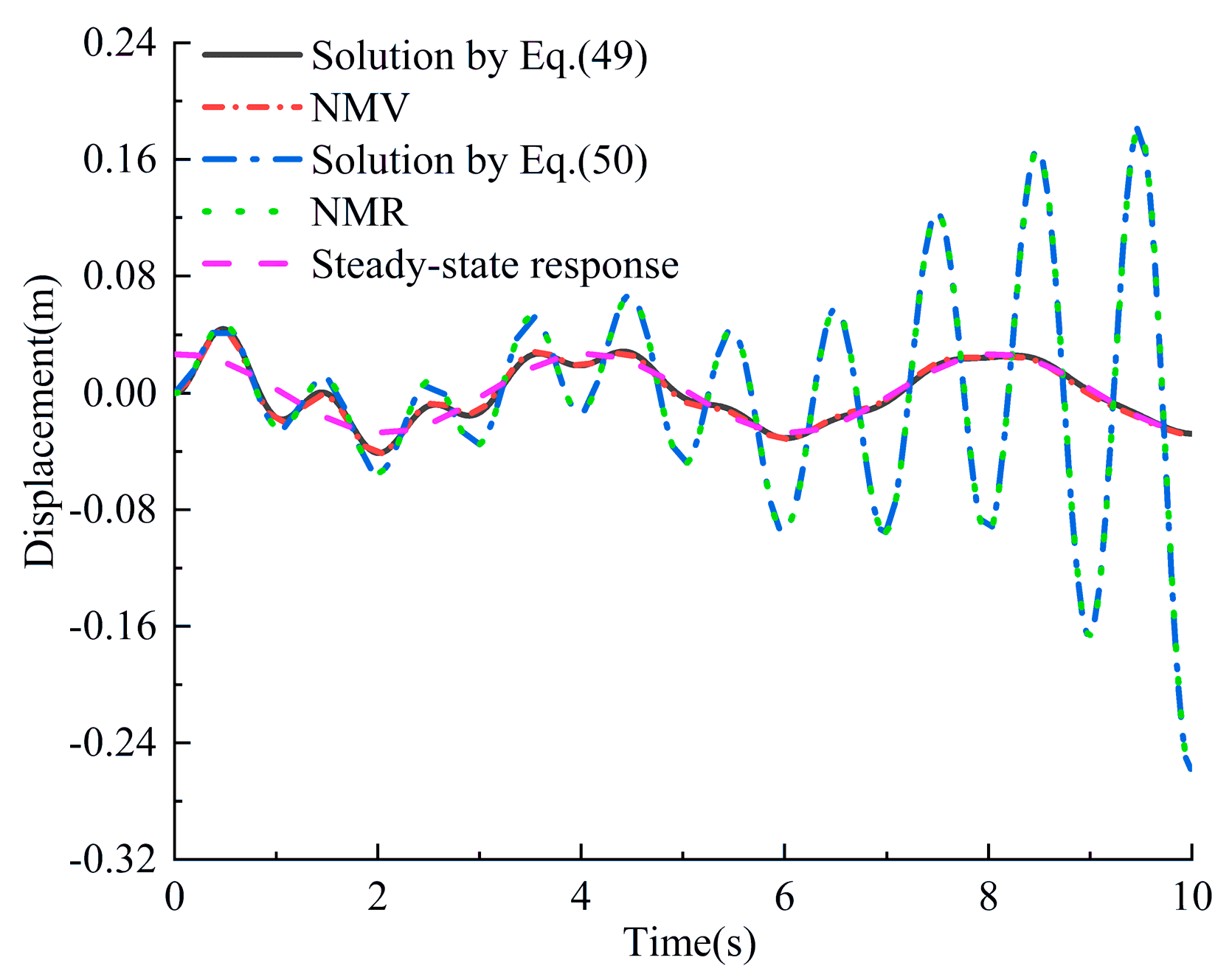
4.2. Harmonic Vibration
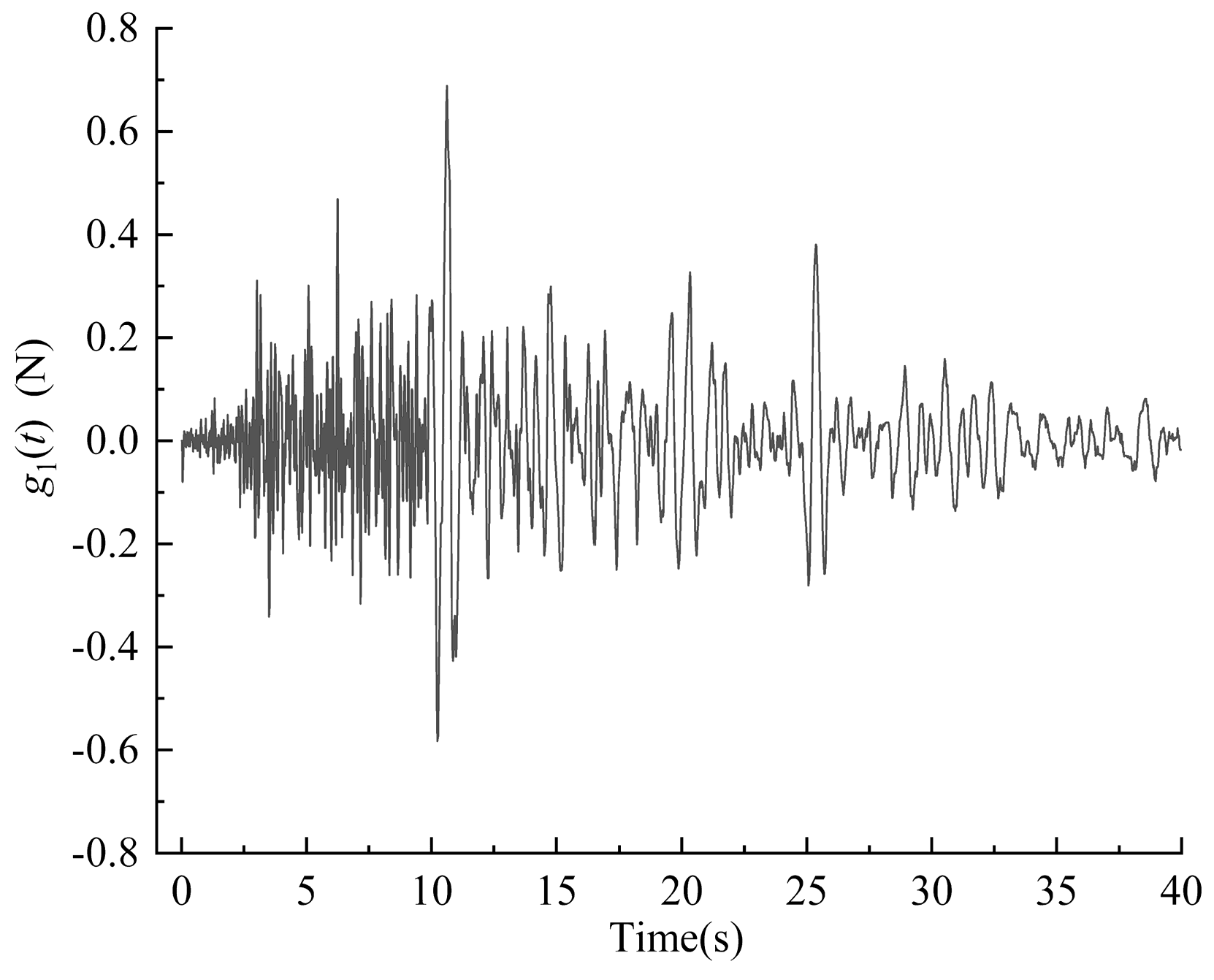
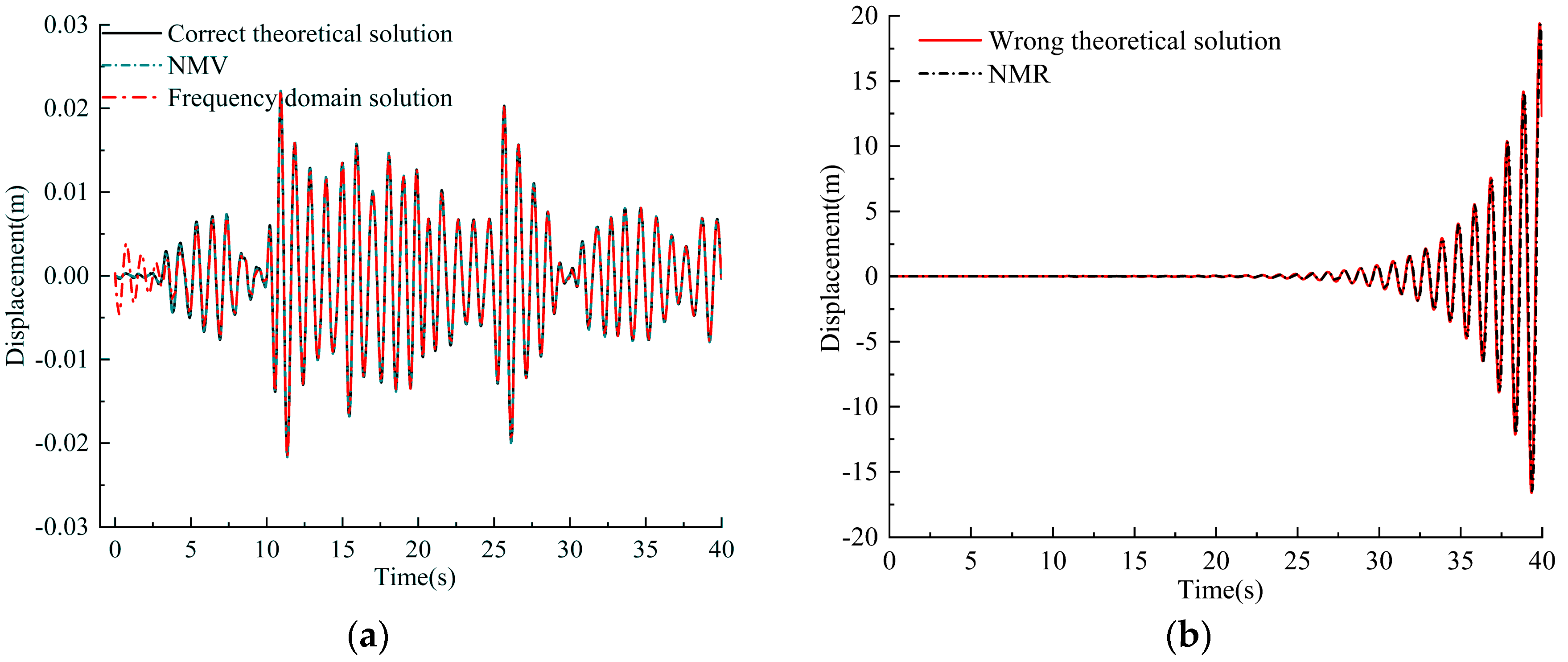
4.3. Seismic Excitation
5. Conclusions
- (1)
- For free or forced vibration of a hysteretic damped system, the stability of numerical methods is the same as that of a viscously damped system. The divergence of numerical results is caused by the divergent term of the complementary solution if using the real-valued initial conditions. The virtual initial conditions can remove the divergent term, and make the numerical solution converge to the exact theoretical solution.
- (2)
- The virtual initial conditions are purely imaginary. For free vibration, the virtual initial conditions depend on the real-valued initial conditions, and for forced vibration, the virtual initial conditions depend on the amplitude of the force.
- (3)
- The solution in the frequency domain can only obtain the steady-state vibration. However, the proposed direct integration method can accurately calculate the transient response, which results in a reasonable estimation for whole vibration history and is, thus, recommended for practical applications.
Author Contributions
Funding
Conflicts of Interest
References
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Bert, C.W. Material damping: An introductory review of mathematical models, measures, and experimental techniques. J. Sound Vib. 1973, 29, 129–153. [Google Scholar] [CrossRef]
- Lazan, B.J. Damping of Material and Members in Structural Mechanics; Pergamon Press: London, UK, 1968. [Google Scholar]
- Rinaldin, G.; Amadio, C.; Fragiacomo, M. Effects of seismic sequences on structures with hysteretic or damped dissipative behaviour. Soil Dyn. Earthq. Eng. 2017, 97, 205–215. [Google Scholar] [CrossRef]
- Maiti, S.; Bandyopadhyay, R.; Chatterjee, A. Vibrations of an Euler-Bernoulli beam with hysteretic damping arising from dispersed frictional microcracks. J. Sound Vib. 2018, 412, 287–308. [Google Scholar] [CrossRef]
- Zhou, L.; Su, Y.S. Cyclic Loading Test on Beam-to-Column Connections Connecting SRRAC Beams to RACFST Columns. Int. J. Civ. Eng. 2018, 16, 1533–1548. [Google Scholar] [CrossRef]
- Sheng, M.; Guo, Z.; Qin, Q.; He, Y. Vibration characteristics of a sandwich plate with viscoelastic periodic cores. Compos. Struct. 2018, 206, 54–69. [Google Scholar] [CrossRef]
- Martakis, P.; Taeseri, D.; Chatzi, E.; Laue, J. A centrifuge-based experimental verification of Soil-Structure Interaction effects. Soil Dyn. Earthq. Eng. 2017, 103, 1–14. [Google Scholar] [CrossRef]
- Singiresu, S.R. Mechanical Vibrations; Addison-Wesley Publishing Company: New York, NY, USA, 1990. [Google Scholar]
- Pavlou, E.A. Dynamic Analysis of Systems with Hysteretic Damping; Rice University: Houston, TX, USA, 1999. [Google Scholar]
- Chakraborty, G. On Response of a Single-Degree-of-Freedom Oscillator with Constant Hysteretic Damping Under Arbitrary Excitation. J. Inst. Eng. (India) Ser. C 2016, 97, 579–582. [Google Scholar] [CrossRef]
- Lacayo, R.; Pesaresi, L.; Groß, J.; Fochler, D.; Armand, J.; Salles, L.; Schwingshack, C.; Allen, M.; Brake, M. Nonlinear modeling of structures with bolted joints: A comparison of two approaches based on a time-domain and frequency-domain solver. Mech. Syst. Signal Process. 2019, 114, 413–438. [Google Scholar] [CrossRef] [Green Version]
- Schriefer, T.; Hofmann, M. A hybrid frequency-time-domain approach to determine the vibration fatigue life of electronic devices. Microelectron. Reliab. 2019, 98, 86–94. [Google Scholar] [CrossRef]
- Idriss, I.M.; Seed, H.B. Seismic response of horizontal soil layers. J. Soil Mech. Found. Div. 1968, 94, 1003–1031. [Google Scholar]
- Star, L.M.; Tileylioglu, S.; Givens, M.J.; Mylonakis, G.; Stewart, J.P. Evaluation of soil-structure interaction effects from system identification of structures subject to forced vibration tests. Soil Dyn. Earthq. Eng. 2019, 116, 747–760. [Google Scholar] [CrossRef]
- Khodakarami, M.I.; Lashgari, A. An equivalent linear substructure approximation for the analysis of the liquefaction effects on the dynamic soil–structure interaction. Asian J. Civ. Eng. 2018, 19, 67–78. [Google Scholar] [CrossRef]
- Nampally, S.; Padhy, S.; Trupti, S.; Prasad, P.P.; Seshunarayana, T. Evaluation of site effects on ground motions based on equivalent linear site response analysis and liquefaction potential in Chennai, South India. J. Seismol. 2018, 22, 1075–1093. [Google Scholar] [CrossRef]
- Sonmezer, Y.B.; Bas, S.; Isik, N.S.; Akbas, S.O. Linear and nonlinear site response analyses to determine dynamic soil properties of Kirikkale. Geomech. Eng. 2018, 16, 435–448. [Google Scholar] [CrossRef]
- Clough, R.W.; Penzien, J. Dynamics of Structures; McGraw-Hill: New York, NY, USA, 1975; pp. 194–198. [Google Scholar]
- Poul, M.K.; Zerva, A. Efficient time-domain deconvolution of seismic ground motions using the equivalent-linear method for soil-structure interaction analyses. Soil Dyn. Earthq. Eng. 2018, 112, 138–151. [Google Scholar] [CrossRef]
- Liang, F.; Chen, H.; Huang, M. Accuracy of three-dimensional seismic ground response analysis in time domain using nonlinear numerical simulations. Earthq. Eng. Eng. Vib. 2017, 32–43. [Google Scholar] [CrossRef]
- Coleman, J.; Bolisetti, C.; Whittaker, A. Time-domain soil-structure interaction analysis of nuclear facilities. Nucl. Eng. Des. 2016, 298, 264–270. [Google Scholar] [CrossRef] [Green Version]
- Rostami, S.; Shojaee, S. Development of a Direct Time Integration Method Based on Quartic B-spline Collocation Method. Iran. J. Sci. Technol. Trans. Civ. Eng. 2019, 43 (Suppl. 1), 615–636. [Google Scholar] [CrossRef]
- Zhu, M.; Zhu, J. Studies on stability of step-by-step methods under complex damping conditions. Earthq. Eng. Eng. Vib. 2001, 21, 59–62. (In Chinese) [Google Scholar] [CrossRef]
- Henwood, D.J. Approximating the Hysteretic Damping Matrix by a Viscous Matrix for Modelling in the Time Domain. J. Sound Vib. 2002, 254, 575–593. [Google Scholar] [CrossRef]
- Chen, J.T.; You, D.W. An integral–differential equation approach for the free vibration of a SDOF system with hysteretic damping. Adv. Eng. Softw. 1999, 30, 43–48. [Google Scholar] [CrossRef]
- Zhou, Z.; Liao, Z.; Ding, H. A time-domain complex-damping constitutive equation. Earthq. Eng. Eng. Vib. 1999, 19, 37–44. (In Chinese) [Google Scholar] [CrossRef]
- Sun, P.; Yang, H.; Zhao, W.; Liu, Q. The time-domain numerical calculation method based on complex damping model. Earthq. Eng. Eng. Vib. 2019, 39, 203–211. (In Chinese) [Google Scholar] [CrossRef]
- Ribeiro, A.M.R.; Maia, N.M.M.; Silva, J.M.M. Free and Forced Vibration with Viscous and Hysteretic Damping: A Different Perspective. In Proceedings of the 5th International Conference on Mechanics and Materials in Design, Porto, Portugal, 24–26 July 2006. [Google Scholar] [CrossRef]
- Zhu, M.; Zhu, J. Some problems in frequency domain solution of complex damping system. World Earthq. Eng. 2004, 1, 23–28. (In Chinese) [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, D.; Fu, X.; Qi, W. The Direct Integration Method with Virtual Initial Conditions on the Free and Forced Vibration of a System with Hysteretic Damping. Appl. Sci. 2019, 9, 3707. https://doi.org/10.3390/app9183707
Pan D, Fu X, Qi W. The Direct Integration Method with Virtual Initial Conditions on the Free and Forced Vibration of a System with Hysteretic Damping. Applied Sciences. 2019; 9(18):3707. https://doi.org/10.3390/app9183707
Chicago/Turabian StylePan, Danguang, Xiangqiu Fu, and Wenrui Qi. 2019. "The Direct Integration Method with Virtual Initial Conditions on the Free and Forced Vibration of a System with Hysteretic Damping" Applied Sciences 9, no. 18: 3707. https://doi.org/10.3390/app9183707
APA StylePan, D., Fu, X., & Qi, W. (2019). The Direct Integration Method with Virtual Initial Conditions on the Free and Forced Vibration of a System with Hysteretic Damping. Applied Sciences, 9(18), 3707. https://doi.org/10.3390/app9183707