Time Frequency Representation Enhancement via Frequency Matching Linear Transform for Bearing Condition Monitoring under Variable Speeds


Abstract
:1. Introduction
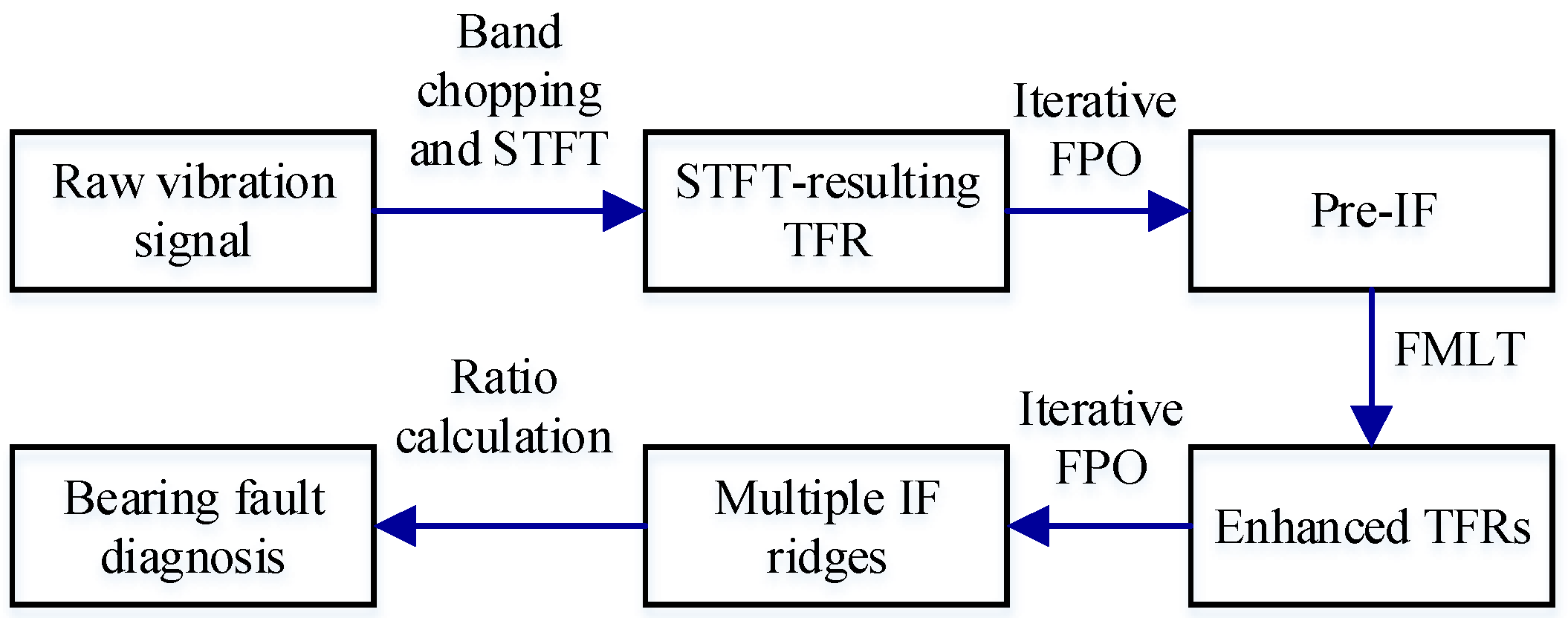
2. Presentation of Proposed FPO-Guided FMLT Method
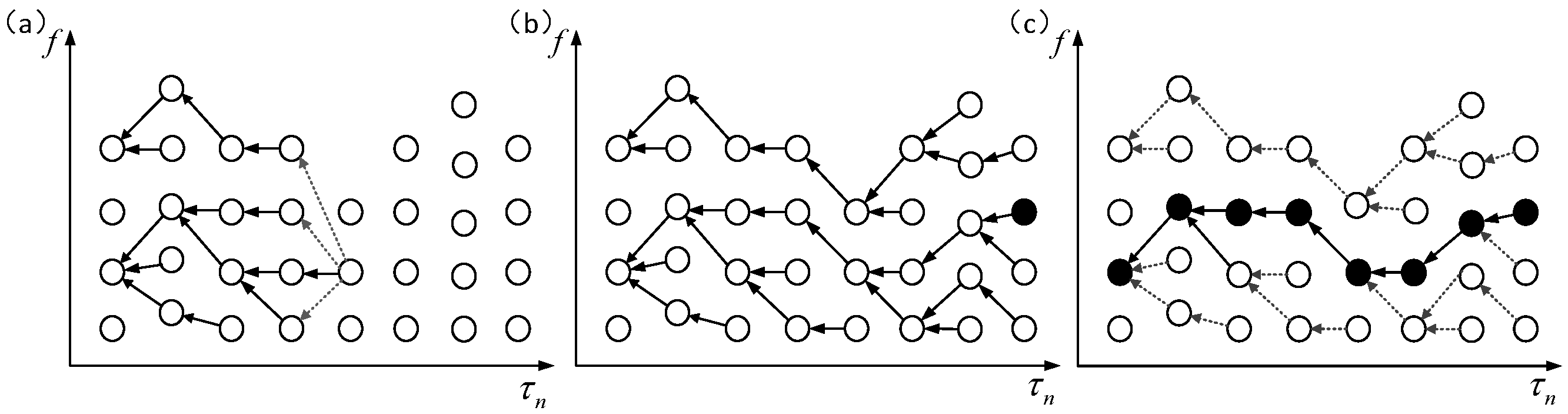
2.1. Pre-IF Estimation via FPO Algorithm
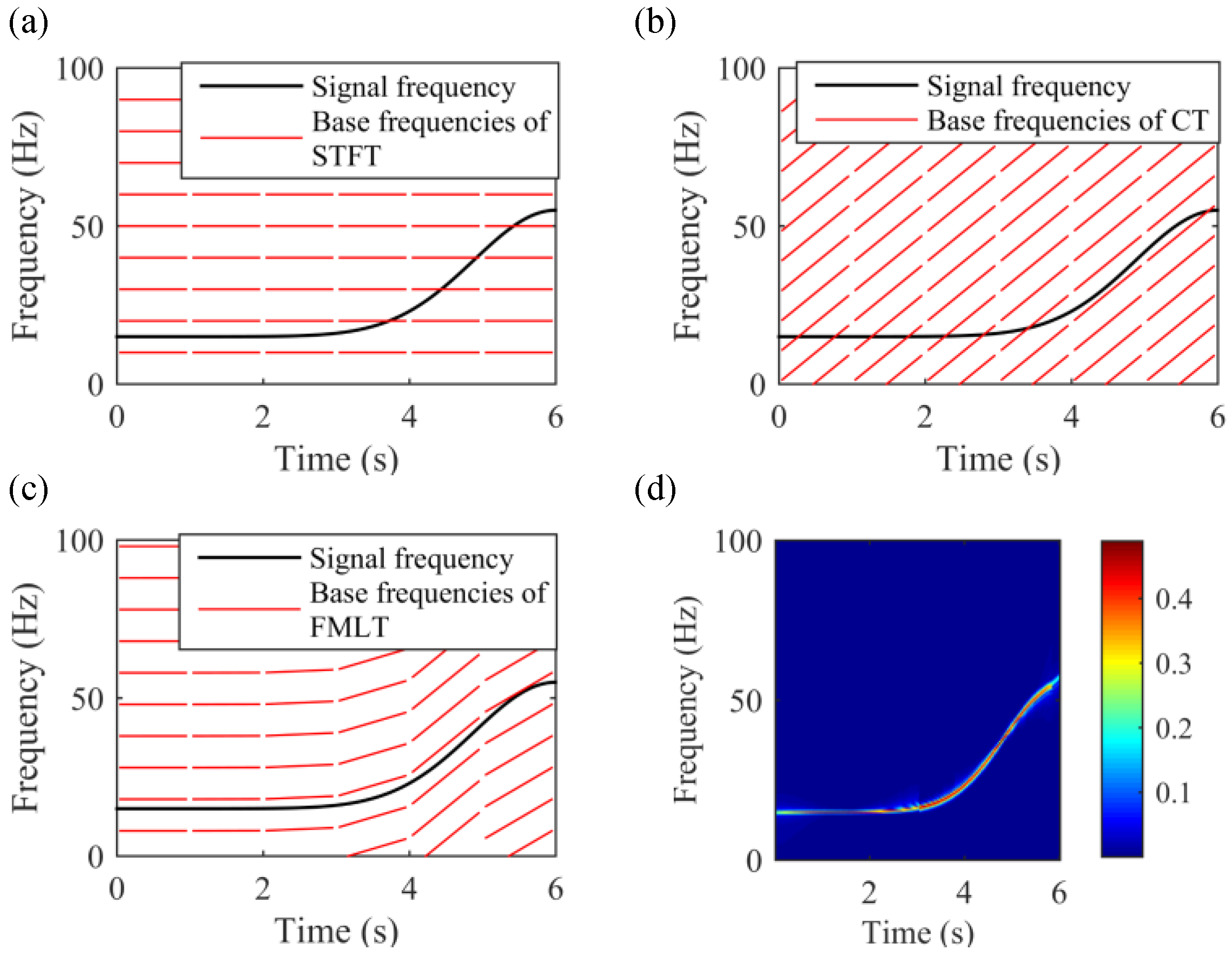
2.2. FMLT for TFR Enhancement
2.3. Bearing Fault Diagnosis Based on Extracted IF Ridges
3. Experimental Verification
3.1. Bearing Outer Race Fault Diagnosis
3.2. Bearing Inner Race Fault Diagnosis
4. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| IF | Instantaneous frequency |
| TFR | Time frequency representation |
| LT | Linear transform |
| STFT | Short time Fourier transform |
| FMLT | Frequency matching linear transform |
| FPO | Fast path optimization |
| TFA | Time frequency analysis |
| WT | Wavelet transform |
| PCT | polynomial chirplet transform |
| SST | synchrosqueezing transform |
| SET | Synchroextracting transform |
| IFCF | Instantaneous fault characteristic frequency |
References
- Cui, L.; Gong, X.; Zhang, J.; Wang, H. Double-dictionary matching pursuit for fault extent evaluation of rolling bearing based on the Lempel-Ziv complexity. J. Sound Vib. 2016, 385, 372–388. [Google Scholar] [CrossRef]
- Wang, D.; Peter, W.T.; Yiu, L.T. A morphogram with the optimal selection of parameters used in morphological analysis for enhancing the ability in bearing fault diagnosis. Meas. Sci. Technol. 2012, 23, 065001. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z.; Kozik, J. Early fault diagnosis of bearing and stator faults of the single-phase induction motor using acoustic signals. Measurement 2018, 113, 1–9. [Google Scholar] [CrossRef]
- Islam, M.R.; Kim, Y.H.; Kim, J.Y.; Kim, J.M. Detecting and Learning Unknown Fault States by Automatically Finding the Optimal Number of Clusters for Online Bearing Fault Diagnosis. Appl. Sci. 2019, 9, 2326. [Google Scholar] [CrossRef]
- Had, A.; Sabri, K. A two-stage blind deconvolution strategy for bearing fault vibration signals. Mech. Syst. Signal Process. 2019, 134, 106307. [Google Scholar] [CrossRef]
- Urbanek, J.; Barszcz, T.; Sawalhi, N.; Randall, R. Comparison of amplitude-based and phase-based methods for speed tracking in application to wind turbines. Metrol. Meas. Syst. 2011, 18, 295–304. [Google Scholar] [CrossRef]
- Borghesani, P.; Ricci, R.; Chatterton, S.; Pennacchi, P. Diagnostic of rolling element bearings with envelope analysis in non-stationary conditions. In Advances in Condition Monitoring of Machinery in Non-Stationary Operations; Springer: Berlin/Heidelberg, Germany, 2014; pp. 127–135. [Google Scholar]
- Fyfe, K.; Munck, E. Analysis of computed order tracking. Mech. Syst. Signal Process. 1997, 11, 187–205. [Google Scholar] [CrossRef]
- Shi, J.; Liang, M.; Necsulescu, D.S.; Guan, Y. Generalized stepwise demodulation transform and synchrosqueezing for time–frequency analysis and bearing fault diagnosis. J. Sound Vib. 2016, 368, 202–222. [Google Scholar] [CrossRef]
- Ming, A.; Zhang, W.; Qin, Z.Y.; Chu, F.L. Fault feature extraction and enhancement of rolling element bearing in varying speed condition. Mech. Syst. Signal Process. 2016, 76, 367–379. [Google Scholar] [CrossRef]
- Saavedra, P.N.; Rodriguez, C.G. Accurate Assessment of Computed Order Tracking. Shock Vib. 2006, 13, 13–32. [Google Scholar] [CrossRef]
- Hasan, M.J.; Kim, J.-M. Bearing Fault Diagnosis under Variable Rotational Speeds Using Stockwell Transform-Based Vibration Imaging and Transfer Learning. Appl. Sci. 2018, 8, 2357. [Google Scholar] [CrossRef]
- Allen, J. Short term spectral analysis, synthesis, and modification by discrete Fourier transform. IEEE Trans. Acoust. Speech Signal Process. 1977, 25, 235–238. [Google Scholar] [CrossRef]
- Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 1990, 36, 961–1005. [Google Scholar] [CrossRef]
- Mann, S.; Haykin, S. The chirplet transform: Physical considerations. IEEE Trans. Signal Process. 1995, 43, 2745–2761. [Google Scholar] [CrossRef]
- Peng, Z.; Meng, G.; Chu, F.L.; Lang, Z.Q.; Zhang, W.M.; Yang, Y. Polynomial chirplet transform with application to instantaneous frequency estimation. IEEE Trans. Instrum. Meas. 2011, 60, 3222–3229. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, W.; Peng, Z.; Meng, G. Multicomponent signal analysis based on polynomial chirplet transform. IEEE Trans. Ind. Electron. 2012, 60, 3948–3956. [Google Scholar] [CrossRef]
- Guan, Y.; Liang, M.; Necsulescu, D.S. Velocity Synchronous Linear Chirplet Transform. IEEE Trans. Ind. Electron. 2018, 66, 6270–6280. [Google Scholar] [CrossRef]
- Michel, C.; Guéguen, P. Time-frequency analysis of small frequency variations in civil engineering structures under weak and strong motions using a reassignment method. Struct. Health Monit. 2010, 9, 159–171. [Google Scholar] [CrossRef]
- Peng, Z.; Chu, F.; He, Y. Vibration signal analysis and feature extraction based on reassigned wavelet scalogram. J. Sound Vib. 2002, 253, 1087–1100. [Google Scholar] [CrossRef]
- Feng, Z.; Chen, X.; Liang, M. Iterative generalized synchrosqueezing transform for fault diagnosis of wind turbine planetary gearbox under nonstationary conditions. Mech. Syst. Signal Process. 2015, 52, 360–375. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Yu, G.; Yu, M.; Xu, C. Synchroextracting transform. IEEE Trans. Ind. Electron. 2017, 64, 8042–8054. [Google Scholar] [CrossRef]
- Huang, H.; Baddour, N.; Liang, M. Bearing fault diagnosis under unknown time-varying rotational speed conditions via multiple time-frequency curve extraction. J. Sound Vib. 2018, 414, 43–60. [Google Scholar] [CrossRef]
- Iatsenko, D.; McClintock, P.V.; Stefanovska, A. Extraction of instantaneous frequencies from ridges in time–frequency representations of signals. Signal Process. 2016, 125, 290–303. [Google Scholar] [CrossRef]
- Liebling, M.; Bernhard, T.F.; Bachmann, A.H.; Froehly, L.; Lasser, T.; Unser, M. Continuous Wavelet Transform Ridge Extraction for Spectral Interferometry Imaging; SPIE: Bellingham, WA, USA, 2005. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing Type | Pitch Diameter (mm) | Ball Diameter (mm) | Number of Balls | IFCF of Outer Race Fault | IFCF of Inner Race Fault |
|---|---|---|---|---|---|
| ER16K | 38.52 | 7.94 | 9 | 3.57 fr | 5.43 fr |
| F Ridges | Pre-f1 | f1 | Pre-f2 | f2 | Pre-f3 | f3 | Pre-f4 | f4 |
|---|---|---|---|---|---|---|---|---|
| MRE | 0.1717 | 0.1109 | 0.1149 | 0.0631 | 0.0982 | 0.0898 | 0.0778 | 0.0281 |
| IF Ridges | Pre-f1 | f1 | Pre-f2 | f2 | Pre-f3 | f3 | Pre-f4 | f4 |
|---|---|---|---|---|---|---|---|---|
| MRE | 0.1839 | 0.0034 | 0.3126 | 0.2941 | 0.1146 | 0.1108 | 0.1632 | 0.0701 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, J.; Du, G.; Ding, R.; Zhu, Z. Time Frequency Representation Enhancement via Frequency Matching Linear Transform for Bearing Condition Monitoring under Variable Speeds. Appl. Sci. 2019, 9, 3828. https://doi.org/10.3390/app9183828
Shi J, Du G, Ding R, Zhu Z. Time Frequency Representation Enhancement via Frequency Matching Linear Transform for Bearing Condition Monitoring under Variable Speeds. Applied Sciences. 2019; 9(18):3828. https://doi.org/10.3390/app9183828
Chicago/Turabian StyleShi, Juanjuan, Guifu Du, Rongmei Ding, and Zhongkui Zhu. 2019. "Time Frequency Representation Enhancement via Frequency Matching Linear Transform for Bearing Condition Monitoring under Variable Speeds" Applied Sciences 9, no. 18: 3828. https://doi.org/10.3390/app9183828
APA StyleShi, J., Du, G., Ding, R., & Zhu, Z. (2019). Time Frequency Representation Enhancement via Frequency Matching Linear Transform for Bearing Condition Monitoring under Variable Speeds. Applied Sciences, 9(18), 3828. https://doi.org/10.3390/app9183828