Acoustic Pressure Pipette Aspiration Method Combined with Finite Element Analysis for Isotropic Materials


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Material and Specimens
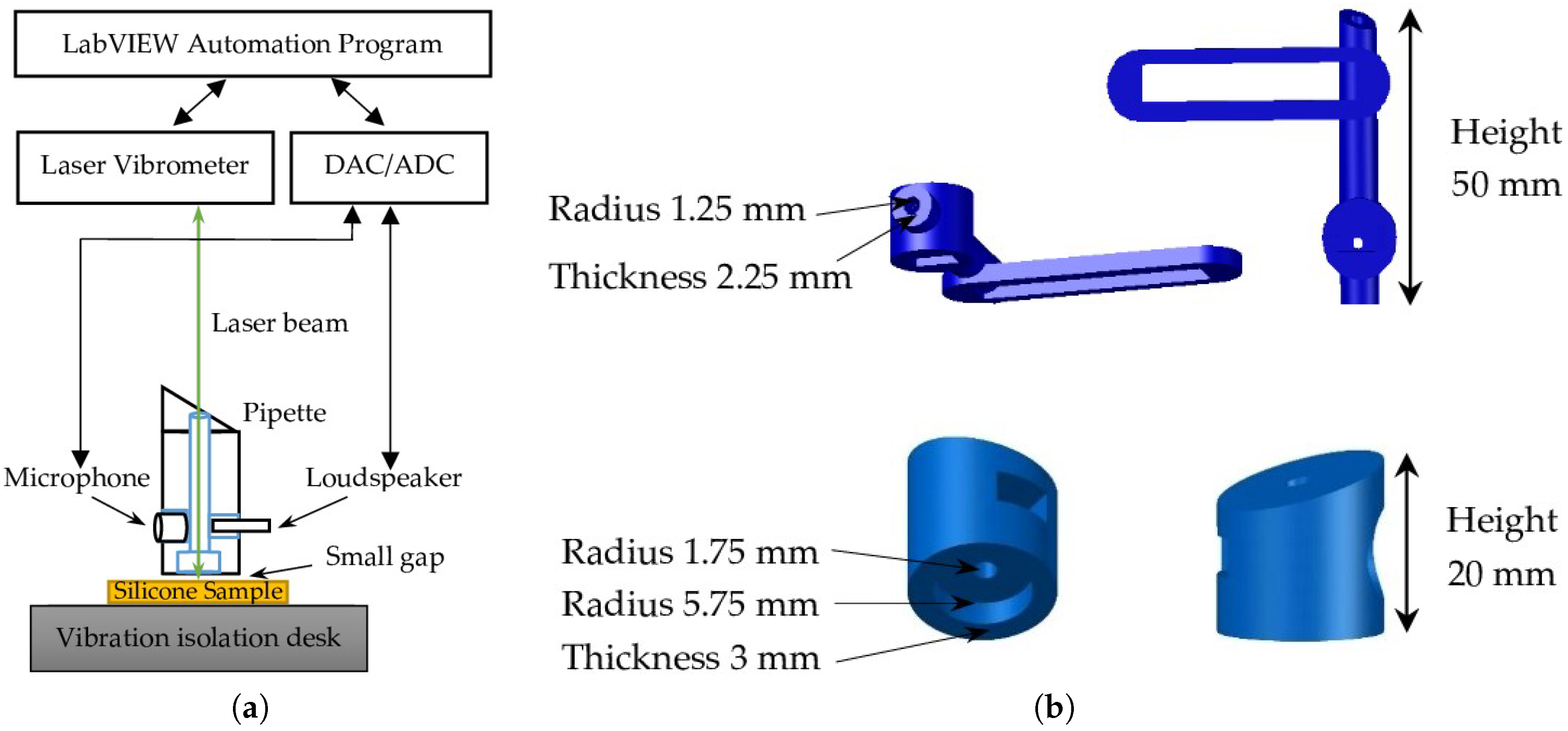
3. Experimental Setup
4. Numerical Simulation
4.1. Stiffness
4.2. Boundary Condition
4.3. Material Contents of the Model
4.3.1. Young’s Modulus
4.3.2. Poisson’s Ratio
4.3.3. Density
5. Results
5.1. Measurement by the Pipette with Gap
5.1.1. Influence of the Excitation Pressure Variations
5.1.2. Influence of the Pipette Tip Compression Force on the Measurements
5.1.3. Vibrational Behavior of the Surface by the Pipette
5.2. Simulation Results
5.2.1. Connected Pipette
5.2.2. Pipette with Gap
5.2.3. The Effect of the Pipette Wall Friction (Gap vs. Connected)
5.2.4. Damping Analysis
5.2.5. Poisson’s Ratio Analysis
5.2.6. Influence of the Pipette Radius
6. Discussion
6.1. Capability of the Aoki et al. Equation (1) for a Dynamic Experimental Setup
6.2. Capability of the Correction Factors in Equations (12) and (13) to Cover a Broad Range of Cases
6.3. Effect of the Compression Force on the Measurement
6.4. Sensitivity of Results to the Pipette-Surface Boundary Condition
6.5. Effect of the Radius of the Pipette on the Measurement
6.6. Effect of the Damping Factor and the Poisson’s Ratio
6.7. Effect of the Excitation Pressure Amplitude
6.8. Linear Elastic Behavior of the Model
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Heris, H.K.; Miri, A.K.; Tripathy, U.; Barthelat, F.; Mongeau, L. Indentation of poroviscoelastic vocal fold tissue using an atomic force microscope. J. Mech. Behav. Biomed. Mater. 2013, 28, 383–392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miri, A.K. Mechanical Characterization of Vocal Fold Tissue: A Review Study. J. Voice 2014, 28, 657–667. [Google Scholar] [CrossRef] [PubMed]
- Childers, D.G.; Wong, C.F. Measuring and modeling vocal source-tract interaction. IEEE Trans. Biomed. Eng. 1994, 41, 663–671. [Google Scholar] [CrossRef] [PubMed]
- Yan, Y.; Chen, X.; Bless, D. Automatic tracing of vocal-fold motion from high-speed digital images. IEEE Trans. Biomed. Eng. 2006, 53, 1394–1400. [Google Scholar] [CrossRef] [PubMed]
- Tao, C.; Zhang, Y.; Jiang, J.J. Extracting physiologically relevant parameters of vocal folds from high-speed video image series. IEEE Trans. Biomed. Eng. 2007, 54, 794–801. [Google Scholar] [PubMed]
- Lohscheller, J.; Eysholdt, U.; Toy, H.; Döllinger, M. Phonovibrography: Mapping high-speed movies of vocal fold vibrations into 2D diagrams for visualizing and analyzing the underlying laryngeal dynamics. IEEE Trans. Biomed. Eng. 2008, 27, 300–309. [Google Scholar] [CrossRef] [PubMed]
- Qin, X.; Wang, S.; Wan, M. Improving reliability and accuracy of vibration parameters of vocal folds based on high-speed video and electroglottography. IEEE Trans. Biomed. Eng. 2009, 56, 1744–1754. [Google Scholar]
- Goodyer, E.; Jiang, J.J.; Devine, E.; Sutor, A.; Rupitsch, S.; Zörner, S.; Stingl, M.; Schmidt, B. Devices and methods on analysis of bio-mechanical properties of laryngeal tissue and substitute materials. Curr. Bio-Inform. 2011, 6, 344–361. [Google Scholar] [CrossRef]
- Dion, G.R.; Jeswani, S.; Roof, S.; Fritz, M.; Coelho, P.G.; Sobieraj, M.; Amin, M.R.; Branski, R.C. Functional assessment of the ex vivo vocal folds through biomechanical testing: A review. Mater. Sci. Eng. C Mater. Biol. Appl. 2016, 64, 444–453. [Google Scholar] [CrossRef] [Green Version]
- Cook, D.D.; Nauman, E.; Mongeau, L. Ranking vocal fold model parameters by their influence on modal frequencies. J. Acoust. Soc. Am. 2009, 126, 2002–2010. [Google Scholar] [CrossRef]
- Alipour-Haghighi, F.; Titze, I.R. Elastic models of vocal fold tissues. J. Acoust. Soc. Am. 1991, 90, 1326–1331. [Google Scholar] [CrossRef] [PubMed]
- Kelleher, J.E.; Zhang, K.; Siegmund, T.; Chan, R.W. Spatially varying properties of the vocal ligament contribute to its eigenfrequency response. J. Mech. Behav. Biomed. Mater. 2010, 3, 600–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Döllinger, M.; Berry, D.A.; Hüttner, B.; Bohr, C. Assessment of local vocal fold deformation characteristics in an in vitro static tensile test. J. Acoust. Soc. Am. 2011, 130, 977–985. [Google Scholar] [CrossRef] [PubMed]
- Kelleher, J.E.; Siegmund, T.; Chan, R.W.; Henslee, E.A. Optical measurements of vocal fold tensile properties implications for phonatory mechanics. J. Bio-Mech. 2011, 44, 1729–1734. [Google Scholar] [CrossRef] [PubMed]
- Kataoka, N.; Ohashi, T.; Matsumoto, T.; Aoki, T.; Sato, M. Application of the pipette aspiration technique to the measurement of local elastic moduli of cholesterol-fed rabbit aortas. Theor. Appl. Mech. 1994, 43, 233–238. [Google Scholar]
- Story, B.H.; Titze, I.R. Voice simulation with a body-cover model of the vocal folds. J. Acoust. Soc. Am. 1995, 97, 1249–1260. [Google Scholar] [CrossRef] [PubMed]
- Döllinger, M.; Hoppe, U.; Hettlich, F.; Lohscheller, J.; Schuberth, S.; Eysholdt, U. Vibration parameter extraction from endoscopic image series of the vocal folds. IEEE Trans. Biomed. Eng. 2002, 49, 773–781. [Google Scholar] [CrossRef] [PubMed]
- Neubauer, J.; Zhang, Z.; Miraghaie, R.; Berry, D.A. Coherent structures of the near field flow in a self-oscillating physical model of the vocal folds. J. Acoust. Soc. Am. 2007, 121, 1102–1118. [Google Scholar] [CrossRef] [PubMed]
- Chan, R.W.; Rodriguez, M.L. A simple-shear rheometer for linear viscoelastic characterization of vocal fold tissues at phonatory frequencies. J. Acoust. Soc. Am. 2008, 124, 1207–1219. [Google Scholar] [CrossRef]
- Lamprecht, R.; Maghzinajafabadi, M.; Semmler, M.; Sutor, A. Imaging the vocal folds: A feasibility study on strain imaging and elastography of porcine vocal folds. Appl. Sci. 2019, 9, 2729. [Google Scholar] [CrossRef]
- Becker, S.; Kniesburges, S.; Müller, S.; Delgado, A.; Link, G.; Kaltenbacher, M.; Döllinger, M. Flow-structure-acoustic interaction in a human voice model. J. Acoust. Soc. Am. 2009, 125, 1351–1361. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Neubauer, J.; Berry, D.A. Influence of vocal fold stiffness and acoustic loading on flow-induced vibration of a single layer vocal fold model. J. Sound Vib. 2009, 322, 299–313. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. Characteristics of phonation on set in a two-layer vocal fold model. J. Acoust. Soc. Am. 2009, 125, 1091–1102. [Google Scholar] [CrossRef] [PubMed]
- Owaki, S.; Kataoka, H.; Shimizu, T. Relationship between transglottal pressure and fundamental frequency of phonation-study using a rubber model. J. Voice 2010, 24, 127–132. [Google Scholar] [CrossRef] [PubMed]
- Chan, R.W.; Titze, I.R. Viscoelastic shear properties of human vocal fold mucosa: Measurement methodology and empirical results. J. Acoust. Soc. Am. 1999, 106, 2008–2021. [Google Scholar] [CrossRef] [PubMed]
- Rand, R.P.; Burton, A.C. Mechanical properties of the red cell membrane, I. membrane stiffness and intra-cellular pressure. Biophys. J. 1964, 4, 115–135. [Google Scholar] [CrossRef]
- Cook, T.; Alexander, H.; Cohen, M.L. Experimental method for determining the two-dimensional mechanical properties of living human skin. Med. Biol. Eng. Comput. 1977, 15, 381–390. [Google Scholar] [CrossRef]
- Sato, M.; Levesque, M.J.; Nerem, R.M. An application of the micropipette technique to the measurement of the mechanical properties of cultured bovine aortic endothelial cells. J. Bio-Mech. Eng. 1987, 109, 27–34. [Google Scholar] [CrossRef]
- Theret, D.P.; Levesque, M.J.; Sato, M.; Nerem, R.M.; Wheeler, L.T. The application of a homogeneous half-space model in the analysis of endothelial cell micropipette measurements. J. Bio-Mech. Eng. 1988, 110, 190–199. [Google Scholar] [CrossRef]
- Evans, E.A. New membrane concept applied to the analysis of fluid shear- and micropipette-deformed red blood cells. Biophys. J. 1973, 13, 941–954. [Google Scholar] [CrossRef]
- Matsumoto, T.; Abe, H.; Ohashi, T.; Kato, Y.; Sato, M. Local elastic modulus of atherosclerotic lesions of rabbit thoracic aortas measured by pipette aspiration method. Physiol. Meas. 2002, 23, 635–648. [Google Scholar] [CrossRef] [PubMed]
- Ohashi, T.; Abe, H.; Matsumoto, T.; Sato, M. Pipette aspiration technique for the measurement of nonline and anisotropic mechanical properties of blood vessel walls under biaxial stretch. J. Biomech. 2004, 38, 2248–2256. [Google Scholar] [CrossRef] [PubMed]
- Aoki, T.; Ohashi, T.; Matsumoto, T.; Sato, M. The pipette aspiration applied to the local stiffness measurement of soft tissues. Ann. Biomed. Eng. 1997, 25, 581–587. [Google Scholar] [CrossRef] [PubMed]
- Long, J.L.; Neubauer, J.; Zhang, Z.; Zuk, P.; Berke, G.S.; Chhetri, D.K. Functional testing of a tissue-engineered vocal fold cover replacement. Otolaryngol. Head Neck Surg. 2010, 142, 438–440. [Google Scholar] [CrossRef] [PubMed]
- Miri, A.K.; Heris, H.K.; Mongeau, L.; Javid, F. Nanoscale viscoelasticity of extracellular matrix proteins in soft tissues: A multiscale approach. J. Mech. Behav. Biomed. Mater. 2014, 30, 196–204. [Google Scholar] [CrossRef]
- Ohsumi, A.; Nakano, N. Identification of physical parameters of a flexible structure from noisy measurement data. IEEE Trans. Instrum. Meas. 2002, 51, 923–929. [Google Scholar] [CrossRef]
- Lu, M.H.; Yu, W.; Huang, Q.H.; Huang, Y.P.; Zheng, Y.P. A handheld indentation system for the assessment of mechanical properties of soft tissues in vivo. IEEE Trans. Instrum. Meas. 2009, 58, 3079–3085. [Google Scholar]
- Hollien, H.; Dew, D.; Philips, P. Phonational frequency ranges of adults. J. Speech Lang. Hear. Res. 1971, 14, 755–760. [Google Scholar] [CrossRef]
- Zörner, S.; Kaltenbacher, M.; Lerch, R.; Sutor, A.; Döllinger, M. Measurement of the elastic modulus of soft tissues. J. Biomech. 2010, 43, 1540–1545. [Google Scholar] [CrossRef]
- Weiss, S.; Sutor, A.; Ilg, J.; Rupitsch, S.J.; Lerch, R. Measurement and analysis of the material properties and oscillation characteristics of synthetic vocal folds. Acta Acust. United Acust. 2016, 102, 214–229. [Google Scholar] [CrossRef]
- Weiss, S.; Thomson, S.L.; Sutor, A.; Rupitsch, S.J.; Lerch, R. Influence of pipette geometry on the displacement profile of isotropic materials used for vocal fold modeling. Int. Conf. Biomed. Electron. Devices Biodevices 2013, 102, 108–113. [Google Scholar]
- Weiss, S.; Thomson, S.L.; Lerch, R.; Döllinger, M.; Sutor, A. Pipette aspiration applied to the characterization of nonhomogeneous, transversely-isotropic materials used for vocal fold modeling. J. Mech. Behav. Biomed. Mater. 2013, 17, 137–151. [Google Scholar] [CrossRef]
- Goodyer, E.; Müller, F.; Licht, K.; Hess, M. In vivo measurement of the shear modulus of the human vocal fold: Interim results from eight patients. Eur. Arch. Oto-Rhino-Laryngol. 2007, 264, 631–635. [Google Scholar] [CrossRef]
- Rupitsch, S.J.; Wolf, F.; Sutor, A.; Lerch, R. Estimation of material parameters for piezoelectric actuators using electrical and mechanical quantities. In Proceedings of the 2009 IEEE Ultrasonics Symposium, Rome, Italy, 20–23 September 2009; pp. 414–417. [Google Scholar]
- Drechsel, J.S. Characterization of Synthetic, Self-Oscillating Vocal Fold Models. Master’s Thesis, Brigham Young University, Provo, UT, USA, 2007. [Google Scholar]
- Drain, L.E. The Laser Doppler Techniques, 1st ed.; Wiley-Interscience: Chichester, UK, 1980. [Google Scholar]
- Link, G.; Kaltenbacher, M.; Döllinger, M. A 2d finite-element scheme for fluid solid acoustic interactions and its application to human phonation. Comput. Methods Appl. Mech. Eng. 2009, 198, 3321–3334. [Google Scholar] [CrossRef]
- Chan, R. Measurements of vocal fold tissue viscoelasticity: Approaching the male phonatory frequency range. J. Acoust. Soc. Am. 2004, 115, 3161–3170. [Google Scholar] [CrossRef] [PubMed]
- Chan, R.W. Estimation of viscoelastic shear properties of vocal-fold tissues based on time temperature superposition. J. Acoust. Soc. Am. 2001, 110, 1548–1561. [Google Scholar] [CrossRef] [PubMed]
- Willis, R.L.; Shane, T.S.; Berthelot, H.Y.; Madigosky, W.M. An experimental-numerical technique for evaluating the bulk and shear dynamic moduli of viscoelastic materials. J. Acoust. Soc. Am. 1997, 102, 3549–3555. [Google Scholar] [CrossRef]
- Chan, R.W.; Fu, M.; Tirunagari, N. Elasticity of the human false vocal fold. Ann. Otol. Rhinol. Laryngol. 2006, 115, 370–381. [Google Scholar] [CrossRef]
- Willis, R.L.; Wu, L.; Berthelot, H.Y. Determination of the complex Young and shear dynamic moduli of viscoelastic materials. J. Acoust. Soc. Am. 2001, 109, 611–621. [Google Scholar] [CrossRef]
- Wojtowicki, J.L.; Jaouen, L.; Panneton, R. New approach for the measurement of damping properties of materials using the Oberst beam. Rev. Sci. Instrum. 2004, 75, 2569–2574. [Google Scholar] [CrossRef] [Green Version]
- Rupitsch, S.J.; Ilg, J.; Sutor, A.; Lerch, R.; Döllinger, M. Simulation based estimation of dynamic mechanical properties for viscoelastic materials used for vocal fold models. J. Sound Vib. 2011, 330, 4447–4459. [Google Scholar] [CrossRef]
- Ilg, J.; Rupitsch, S.J.; Sutor, A.; Lerch, R. Determination of dynamic material properties of silicone rubber using one-point measurements and finite element simulations. IEEE Trans. Instrum. Meas. 2012, 61, 3031–3038. [Google Scholar] [CrossRef]
- Kaltenbacher, M. Numerical Simulation of Mechatronic Sensors and Actuators, 3rd ed.; Springer: Berlin, Germany, 2015; pp. 93–114. [Google Scholar]
- Krasnosel’skii, M.A.; Pokrovskii, A. Systems with Hysteresis, 1st ed.; Springer: Berlin, Germany, 1989. [Google Scholar]
- Mayergoyz, I.D. Mathematical Models of Hysteresis, 1st ed.; Springer: New York, NY, USA, 1991. [Google Scholar]
- Bathe, K.J. Finite Element Procedures, 2nd ed.; Klaus-Jurgen Bathe: Watertown, NY, USA, 2014. [Google Scholar]
- The COMSOL Group. COMSOL Multiphysics: Structural Mechanics Module User’s Guide; COMSOL Inc.: Stockholm, Sweden, 2005. [Google Scholar]


















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maghzinajafabadi, M.; Lamprecht, R.; Semmler, M.; Sutor, A. Acoustic Pressure Pipette Aspiration Method Combined with Finite Element Analysis for Isotropic Materials. Appl. Sci. 2019, 9, 3875. https://doi.org/10.3390/app9183875
Maghzinajafabadi M, Lamprecht R, Semmler M, Sutor A. Acoustic Pressure Pipette Aspiration Method Combined with Finite Element Analysis for Isotropic Materials. Applied Sciences. 2019; 9(18):3875. https://doi.org/10.3390/app9183875
Chicago/Turabian StyleMaghzinajafabadi, Mohammadali, Raphael Lamprecht, Marion Semmler, and Alexander Sutor. 2019. "Acoustic Pressure Pipette Aspiration Method Combined with Finite Element Analysis for Isotropic Materials" Applied Sciences 9, no. 18: 3875. https://doi.org/10.3390/app9183875
APA StyleMaghzinajafabadi, M., Lamprecht, R., Semmler, M., & Sutor, A. (2019). Acoustic Pressure Pipette Aspiration Method Combined with Finite Element Analysis for Isotropic Materials. Applied Sciences, 9(18), 3875. https://doi.org/10.3390/app9183875