1. Introduction
This study is important to the use of leaky mode modulators as near-eye displays because it seeks to increase the device’s field of view without making the fabrication of the device significantly more complex. Currently, near-eye displays are almost exclusively driven by pixelated spatial light modulators [
1]. However, leaky mode modulators have a number advantages over pixelated spatial light modulators (SLMs) for the purposes of near-eye holographic display. They require only two mask steps to fabricate. They are transparent. They produce no zero order, no higher orders, and no conjugate images. They do not suffer from quantization error from pixilation, and they require no backplane. Additionally, they have the ability to rotate the polarization of the diffracted signal light for easy noise filtering. Finally, they can also multiplex color in the frequency domain, allowing all colors to be modulated in the same waveguide. However, these advantages notwithstanding, bottom-exit devices (the configuration most useful for near-eye display) suffer from a reduced field of view. In side-exit leaky mode devices, we observe a large multiplication of diffracted light angle because the device is operating in a regime where the grating equation is nonlinear [
2,
3]. In a bottom-exit device, leaky mode light passes through a high-spatial-frequency output grating that operates in opposition to the leaky mode diffraction [
4]. This second interaction effectively erases the angle-multiplication advantage gained from illuminating the acoustic holographic pattern at a glancing angle. The result of the reduction is that the leaky mode device effectively has a smaller achievable field of view (defined in this work as the visible extent at a given depth) or view zone (defined here as the angular extent over which a point is visible). Note that these concepts are duals in this context and will be treated interchangeably in the text. Our previous work identified the narrowing of view angle in bottom-exit devices as a challenge and stated that a solution would be described in a future publication [
4]. The main aim of this work is to present that solution to restore or increase the leaky mode device view zone/field of view (see
Figure 1) and/or view zone by temporally stitching together multiple diffracted orders of light created by a static internal grating.
Other researchers have used higher-order images to increase the display view zone, field of view, and space bandwidth product [
5,
6]. This work differs from previous efforts in several ways. First, our holographic pattern is a rapidly moving analog signal and not a pixel pattern with fixed locations. Also, leaky mode devices in near-eye applications can have an extremely high refresh rate—potentially exceeding 100 kHz for a 1 cm free-running surface acoustic wave (SAW) aperture (a leaky mode device can write a one millimeter aperture in approximately one microsecond). This refresh rate is at least two orders of magnitude higher than that of commercial near-eye displays and it allows us the ability to contemplate a line-rate approach to increasing field of view. Additionally, our leaky mode devices are made on a highly transparent lithium niobate substrate which is desirable for near-eye applications. Furthermore, using femtosecond laser pulses, we can create high-contrast, laser-induced gratings in the bulk of the substrate [
7,
8] with a number of diffracted orders of visible power. Finally, in addition to spatial light modulation, lithium niobate is an excellent electro-optic substrate which is frequently used to make fast (up to picosecond-rate) phase and amplitude modulators [
9]. These unique attributes of a moving pattern, high refresh rate, high-contrast internal gratings, and integrated illumination pulsing are important to our proposed solution for increasing the field of view in bottom-exit leaky mode devices.
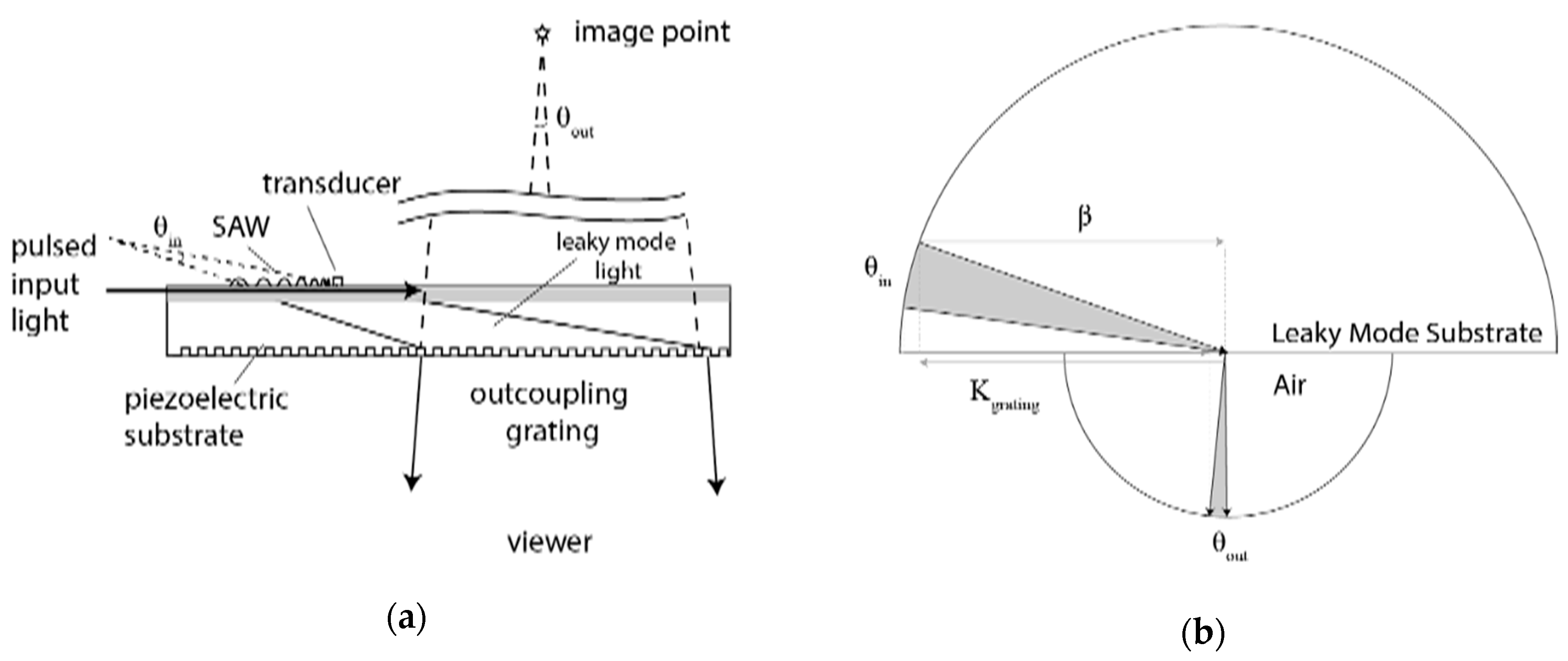
Leaky mode devices comprise a transparent slab of a piezoelectric substrate, such as lithium niobate, with a waveguide indiffused on the surface which sits adjacent to an interdigital transducer. When an RF signal excites the transducer, a surface acoustic wave is generated that travels across the surface of the waveguide. Light trapped in the waveguide, traveling contra-linearly or collinearly with the SAW pattern, may be mode-coupled from a guided mode to a leaky mode which can be steered and shaped by the SAW pattern to form a holographic image. The use of such a device in a near-eye application is shown in
Figure 2. A chirped SAW pattern is generated by the transducer which is designed to mode couple light so that it appears to have originated from a point in space. The leaky mode light travels at a shallow angle through the substrate. This angle is usually very shallow, typically between 1° and 12° from parallel to the substrate surface. However, this angle can be modified by passing the leaky mode light from one substrate to another with another index (or the same index, but canted at an angle) thereby increasing the angle by an angular bias if desired (will assume an angular bias of 10° for the analysis in this paper). The lateral translation of the light ends at the bottom surface of the substrate where the light is out-coupled by a high-spatial frequency out-coupling grating usually patterned by interference lithography and etched into the substrate. This grating has only one diffracted order into the air (all others are evanescent) and toward the viewer’s eye. The light rays that reach the viewer’s eye can be back cast to a distant image point. As the surface acoustic wave moves across the device’s SAW aperture, the image point moves across the viewer’s field of view. The illumination light in the waveguide pulses in coordination with this movement to draw or emit points as the image point ‘cursor’ travels. When it has completed its scan, a new SAW chirp pattern is generated with a different depth and the field of view that is scanned again for as many depth planes as desired (we recently demonstrated a device with arbitrary focus from 4 ft to 10 ft [
4]). Several leaky mode waveguide/transducer ‘channels’ can be placed adjacent to one another to create a vertically multiplexed array. Each channel becomes responsible for the one line of the display. In this way, images can be created at multiple depth planes to form a 3D image.
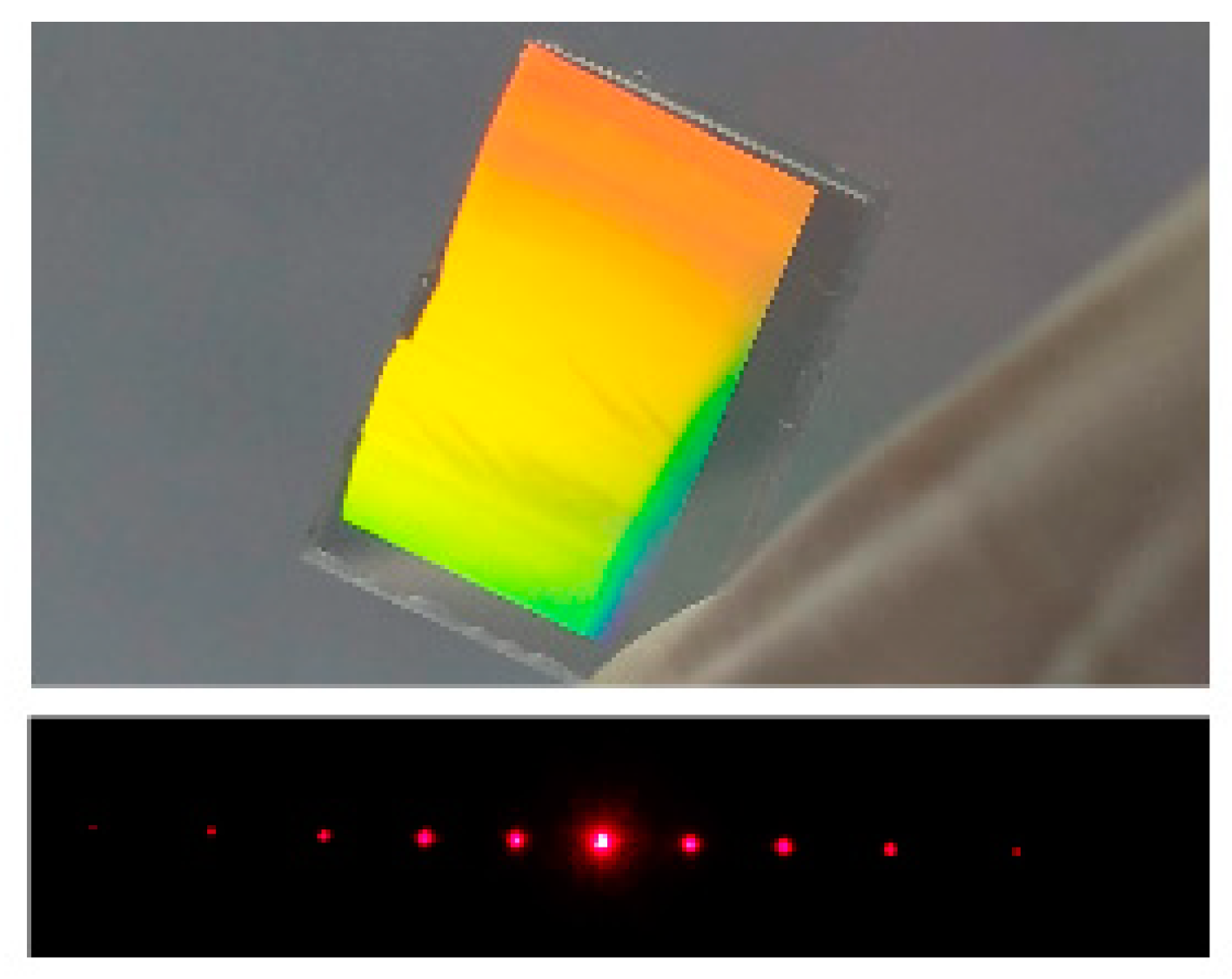
In this paper, we propose a simple modification to the leaky mode device by adding a laser-induced, static grating in the substrate of the leaky mode device. Femtosecond lasers can induce phase changes and ‘catastrophic’ lattice changes in the bulk of lithium niobate. The local nature of the change is aided by two photon up-conversion in the substrate. The result is that relatively high contrast gratings can be formed in the substrate with critical dimensions down below a micron and write depth of several tens of microns (see
Figure 3). When coupled with high-accuracy, large-travel stages, whole wafers can be written with sub-surface gratings [
10,
11,
12]. These gratings can be uniform, chirped, Raman–Nath, or Bragg grating. In our application, we explore a uniform thin grating underneath our leaky mode channels. It would be possible to have different periods underneath each channel, but for this analysis we will assume that the induced grating has only one period everywhere.
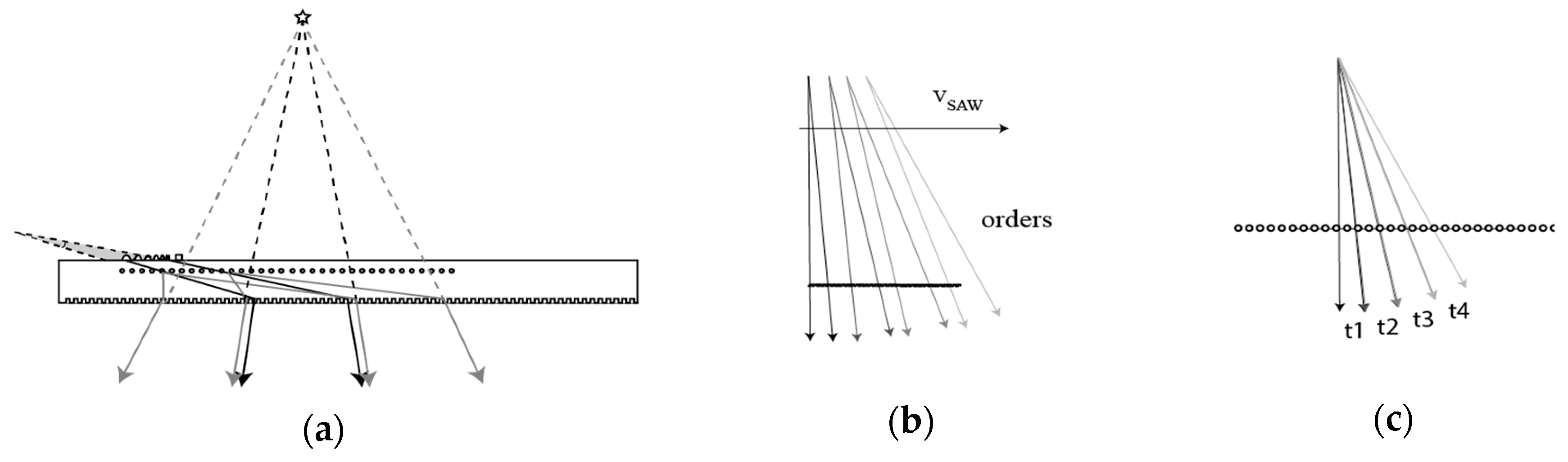
The purpose of the grating is to break the leaky mode light into different orders, each propagating at a different angle. These angles are determined by the laser-induced grating period. Depending on laser parameters, we have generated gratings with half a dozen or more orders. Our analysis assumes five such orders. Each of these diffracted orders will form a high-order image point that appears at a different location and is visible from a different angle than the original image point. We propose that these ‘copies’ of the original image point and others of different depths, can be superimposed over time to form a single image point, as illustrated in
Figure 4a. Instead of scanning with just one point to form an image, now we scan with multiple points. We pulse only when one of these points is in a location that corresponds to a point location and a view in the target image (
Figure 4b). Over time, as these spatial and angular ray bundles accumulate, a wide view angle for every point in the image is achieved (
Figure 4c).
The success of this approach depends upon several of the unique features of leaky mode devices: high refresh rate, smoothly varying chirp functions, fast moving surface acoustic waves and translating leaky mode light. However, these attributes are not sufficient to make the approach successful if the view zones for each diffracted order cannot be adequately separated at the viewer’s eye. If, for example, the viewer saw two overlapped view zones, they would see two points simultaneously and the display designer could not ‘write’ one point without also writing the other.
Figure 5a shows a multi-order, HPO, hologram rendered in grayscale resist and reproduced with 633 nm light. Here, multiple images are created, one for each order of diffraction and each with a corresponding view zone (
Figure 5b). Notice the overlap between the second- and third-order view zones. If the images appeared at different depths (which they do in this case), the viewer would see two images in the overlap position instead of one. Therefore, for our proposed multi-order method we must be able to eliminate as much as possible the overlap between adjacent view zone orders and achieve what we will call a ‘no-overlap condition’. Below, we will use vector analysis to identify parameters for a ‘no overlap condition’, for a near-eye geometry.
2. Supplies and Methods
The geometries for order overlap are shown in
Figure 6a. We will use K-vector analysis to show the relationship between points
P and
Q. After choosing parameters for a near-eye geometry including an internal grating period,
, and propagation distance,
d3, we will plot the high-order rays to confirm a ‘no-overlap’ condition.
We start with the back-cast chirp focus point,
. This parameter is a function of the leaky mode drop angle,
, whose value will change along the chirp. We can use the angles,
and
of light rays exiting both ends of the SAW chirp to define two vectors:
We take the substrate index of refraction as
for
[
13]. Conservation of transverse momentum preserves the value of the vector components parallel to the device interfaces. Therefore, in our analysis we keep track of the propagation constants:
The analysis can be thought of as having multiple layers separated in depth. They are as follows:
d1, the absolute distance from the chirp focus point to the SAW plane;
d2, the absolute distance from the SAW plane to the laser-induced internal grating;
d3, the absolute distance from the internal grating to the output grating; and
d4, the absolute distance traveled by light through the air to the viewer’s eye (see
Figure 6a).
The vectors
and
bracket a ray bundle that propagates through each device layer toward the eye. The cross section of the ray bundle at each of these layers is:
In order to calculate the final orientation of
and
after they have passed through both the internal grating and the output coupling grating for every order
N, we simply subtract
once (every exiting ray must be diffracted by the output grating) and subtract (for negative orders)
,
N times (see
Figure 6b). The magnitudes of the parallel components for the resulting
k-vectors are,
where
determines the sign of the diffracted orders;
in this paper. Using coordinate geometry, we determine that
and
can be expressed as:
We define the non-overlap condition for order when the view zones are (i.e., the first m = −1 diffraction of is below the m = 0 order of at the viewing distance). For the non-overlap condition to be satisfied at any distance, must be greater than .
To determine the distance,
d4, at which the non-overlap condition is satisfied, we must find the intersection of two lines. We compose the first ray from the slope of the un-diffracted
vector and the coordinates of the point, [
, −(
d1,
d2,
d3)]. We compose the second ray from the slope of the negative first-order diffracted,
vector and the coordinates of the point, [
, −(
d1,
d2,
d3)]. We solve for the intersection of these two lines to obtain,
Note that the slopes in this case have perpendicular k components traveling in the opposite direction of those in Equations (14) and (15) above. This is because these rays are going down rather than up.
The coordinate, , gives the depth within the material at which the zero and first-order views separate. This is a higher than necessary upper bound as the two orders still have additional time to separate as they propagate through distance, d4. However, this provides time for other orders, that may have stronger overlap, to separate and to form a set of view windows that is well-separated at the viewing plane.
We chose the parameters listed in
Table 1 to define our near-eye geometry. We chose a 6 mm (
d2 = 1 mm +
d3 = 5 mm) thick substrate with an internal grating at a 1mm distance from the SAW layer with a period,
, of approximately 4 μm and an output coupling grating with a period,
of approximately 300 nm. These values correspond to
and
, respectively. An approximately 10° bias was assumed to give maximum and minimum leaky mode angles of
and
. All of these fit within reasonable fabrication parameters for a two-substrate system.
4. Discussion
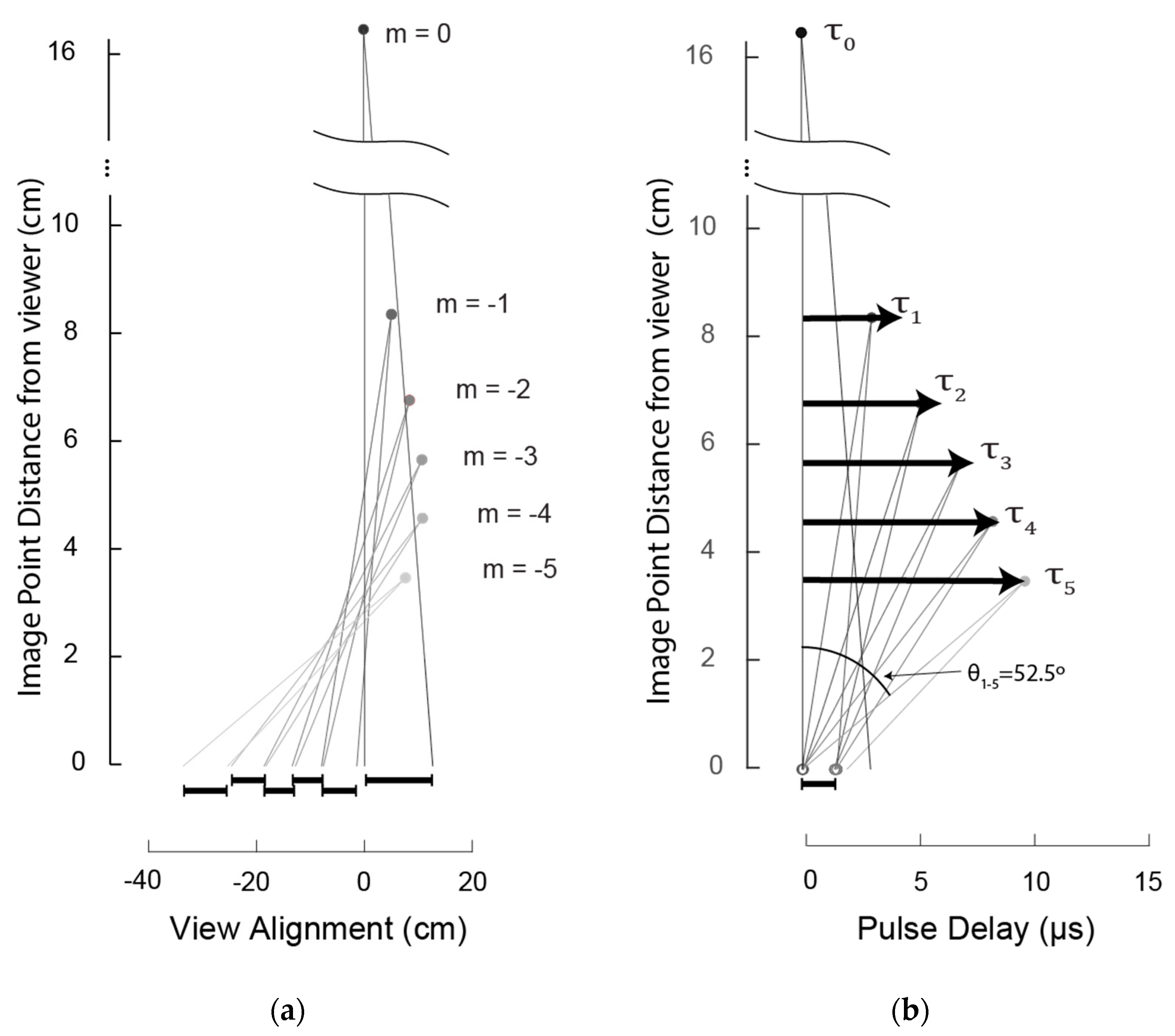
The above results show that the multi-order leaky mode devices have the potential to create image points with a ten-fold increase in the view zone and/or field of view. They show that the non-overlap condition can be achieved for the near-eye case with parameters that are within the current fabrication limits for leaky mode devices, femtosecond direct-writing and interference lithography. The minimum view window of 5.9 mm is larger than the average pupil diameter of the eye and can be actively positioned in front of the pupil, if desired. All pulse delay times are under 10 μs and correspond to roughly 10 mm of SAW travel on the device surface. This means that a new pattern can be written at a rate of approximately 100 kHz. Therefore, to address all of these orders, the SAW would have to travel the SAW chirp length (typically between 1 mm and 10 mm) plus 10 mm. This distance is well-matched to the SAW aperture of current leaky mode devices.
The dramatic increase of view zone from 4.5° to 57° has some important context. Because we chose instead of , the resulting ray bundles are not continuous in angle. Instead, the angular views have gaps that result in a 50% angular duty cycle. We could theoretically choose a very high and achieve a nominal view angle approaching 90 or even 180 degrees, but as long as we only use five modes, the active portions of that view angle would only come to a total of between 25° and 30°, regardless of the total view angle. However, there are ways of filling these gaps, aside from using more modes. We could, for example, run a second channel with light traveling in the opposite direction. The result would be the interlacing of the output views to create a continuous sweep of views. In this scenario, the additional channel could use the same waveguide, the same grating structures, even the same transducer, if desired, (because ITDs are inherently bi-directional). In this scenario, the internal grating could remain the same and the output grating period would be increased (and made simpler to fabricate) so that the fan of angles was symmetric around the surface normal. The result would be a smooth set of views across the 57° sweep without greatly increasing fabrication complexity.
It is worth restating a few of these points. In our methodology, we chose to select which order will be directed normal to the output face. For example, by setting (the third-order diffraction of the ), we obtain an aggregate sweep that is roughly symmetric and ready for the interlacing described above. If, instead, we choose , we obtain a unilateral spread that would be ideal for combining with another unilateral spread. This would be the ideal configuration if the sweep were continuous in angle. However, continuity would require that , which would make it impossible to eliminate view zone overlap. It should be noted, however, that this overlap would be less important for viewers far away from the device (e.g., 500 mm). Therefore, looking forward, this approach might also be of special interest not only to near-eye displays but to large flatscreen displays as well.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}