Double-Diffracted Spatially Separated Heterodyne Grating Interferometer and Analysis on its Alignment Tolerance



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
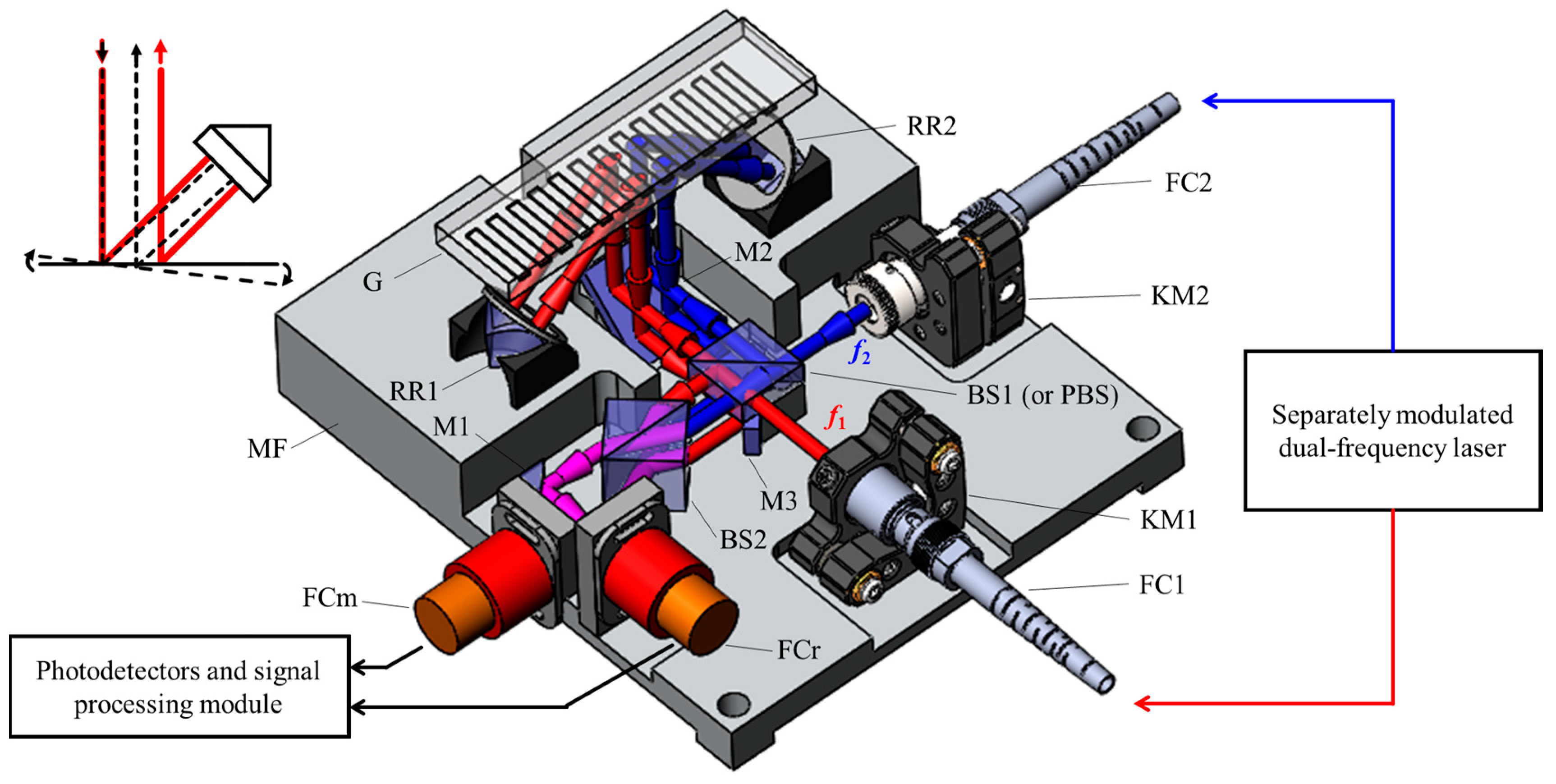
2. Optical Configuration and Mechanical Fixture of the Proposed Grating Interferometer
3. Analysis of Alignment Tolerance on the Double-Diffracted Grating Interferometer
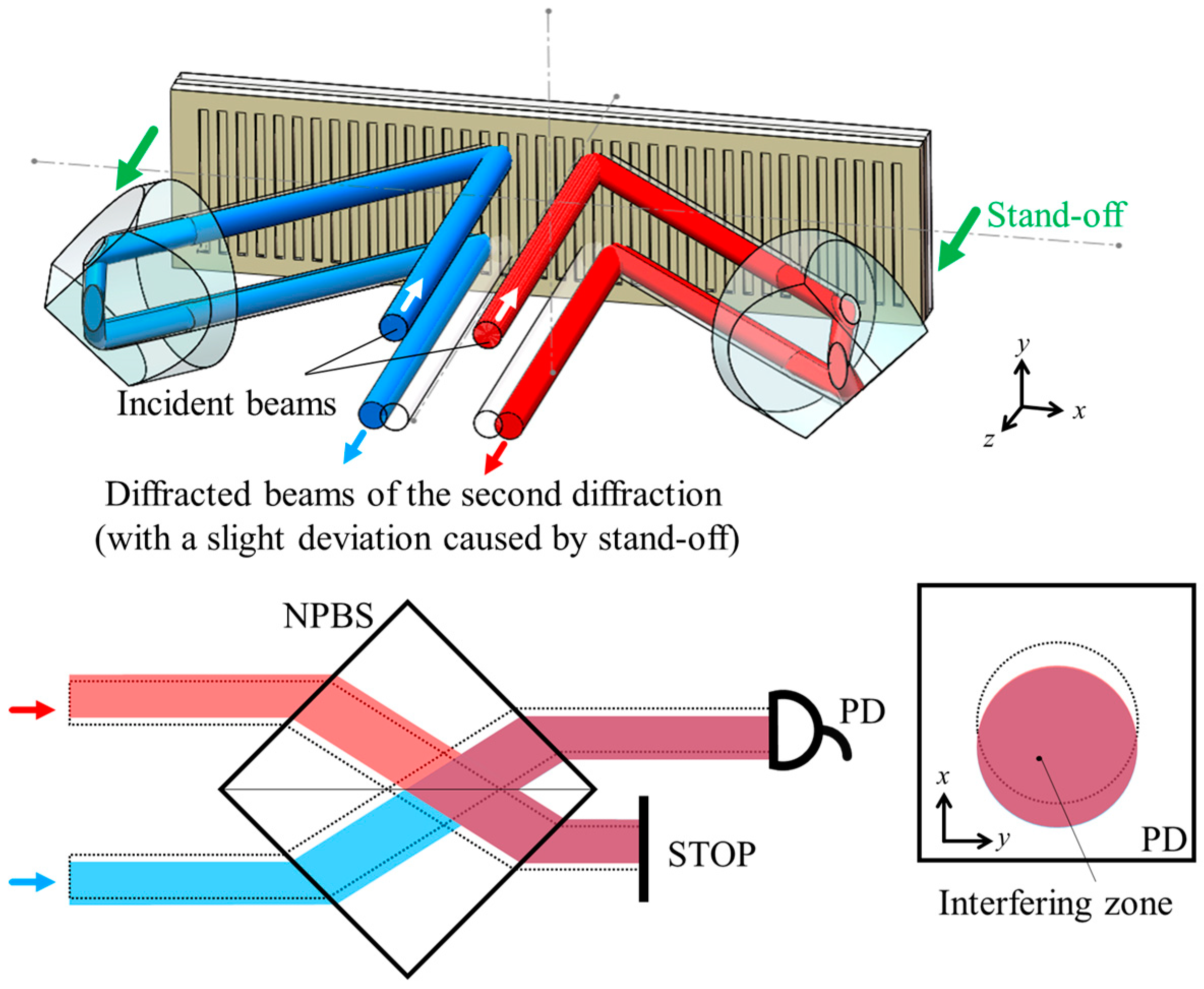
3.1. Analysis of the Stand-off Error
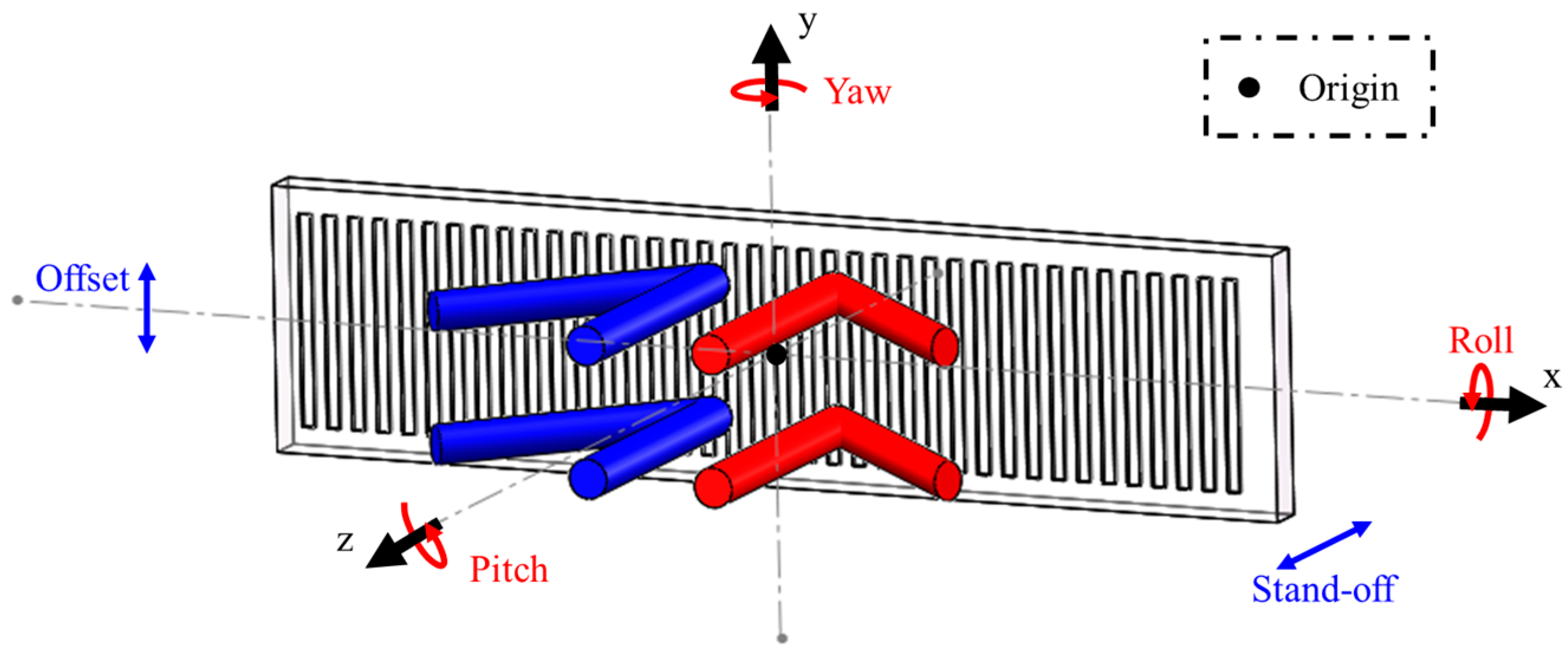
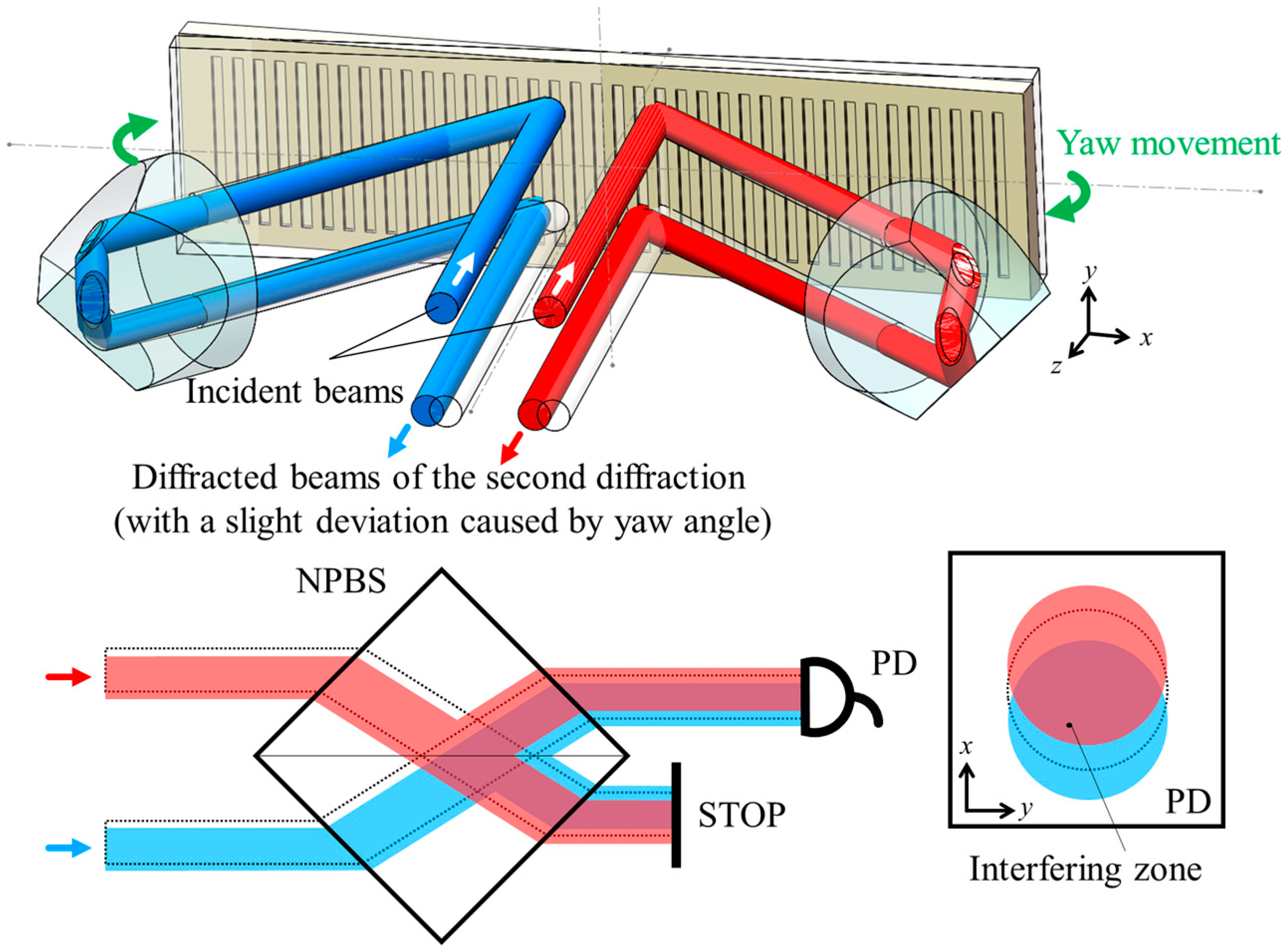
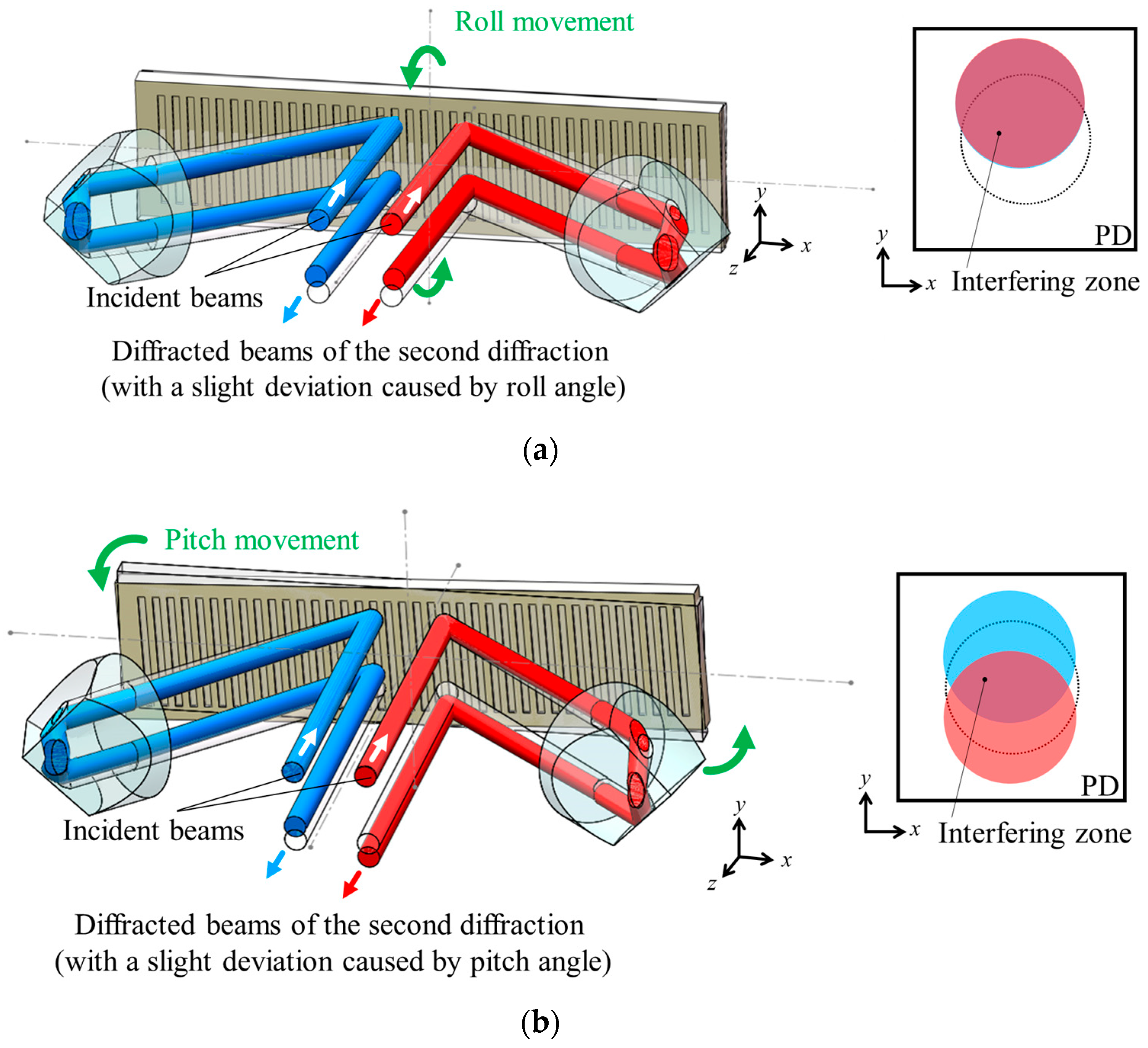
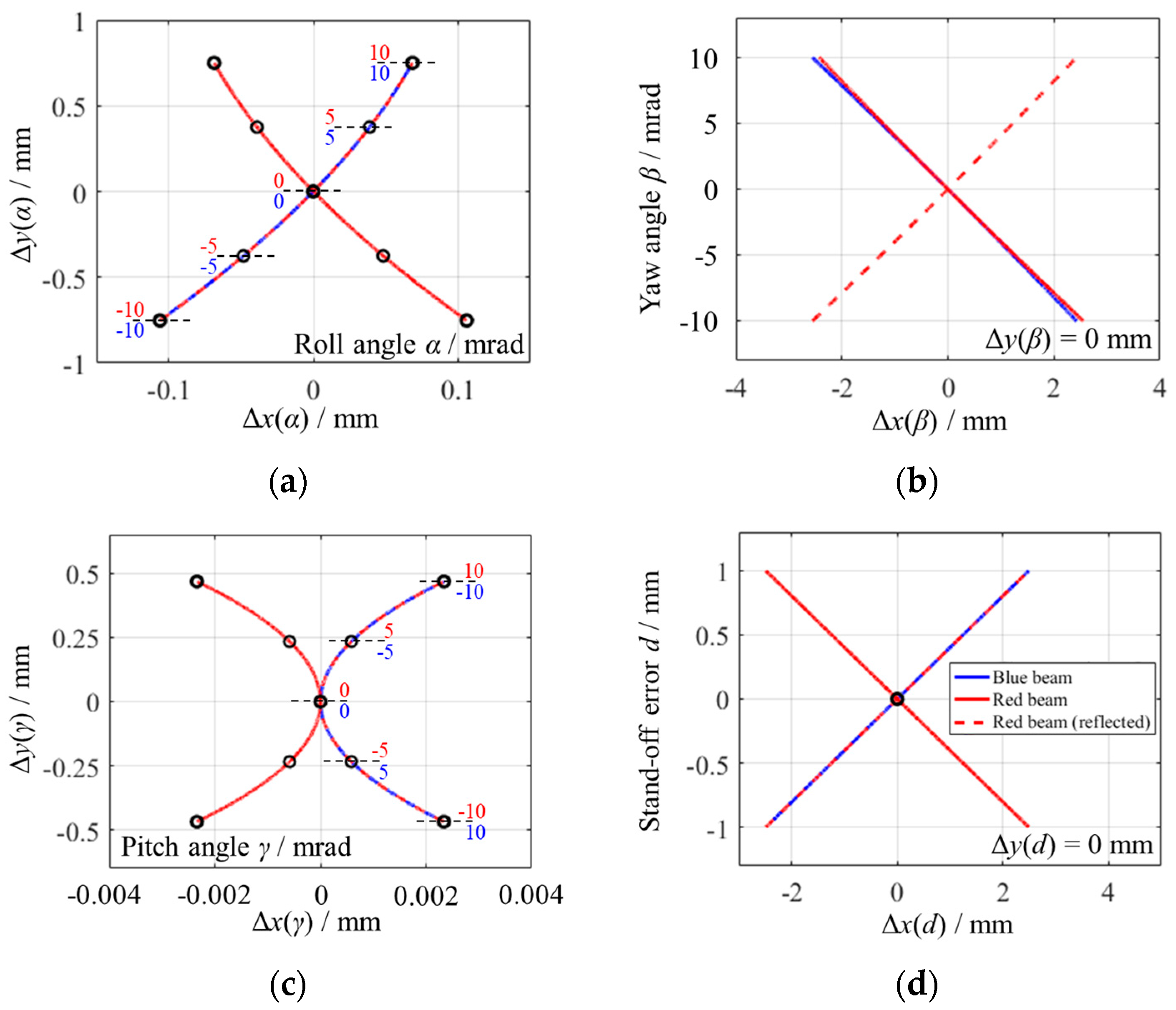
3.2. Analysis of the Roll, Yaw, and Pitch Angles
4. Simulations and Experiments
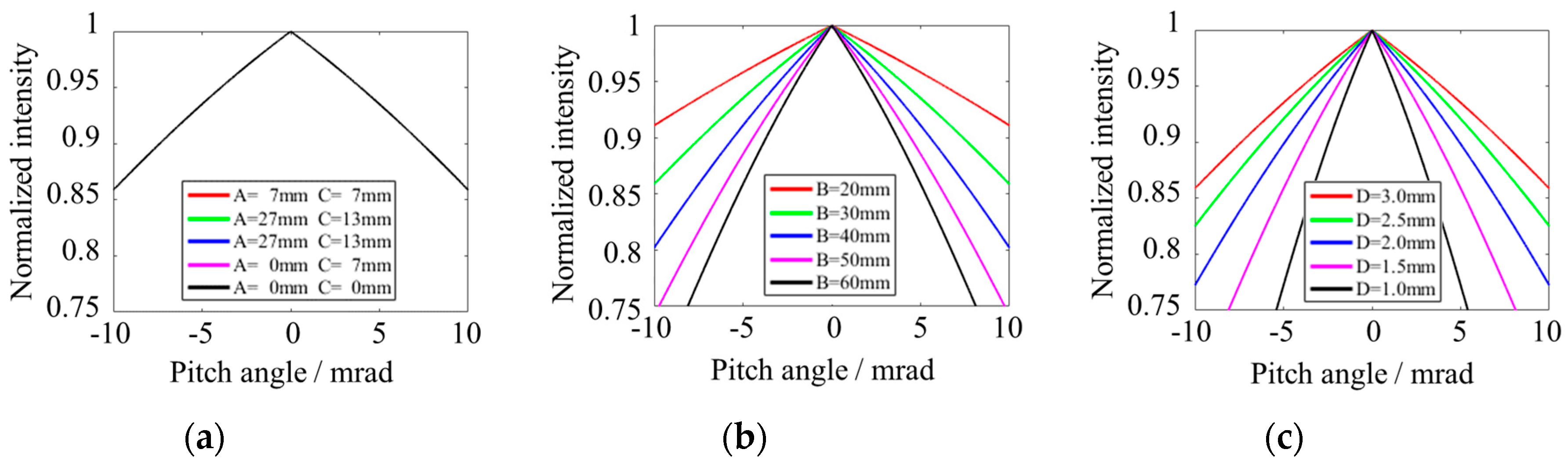
4.1. Simulations
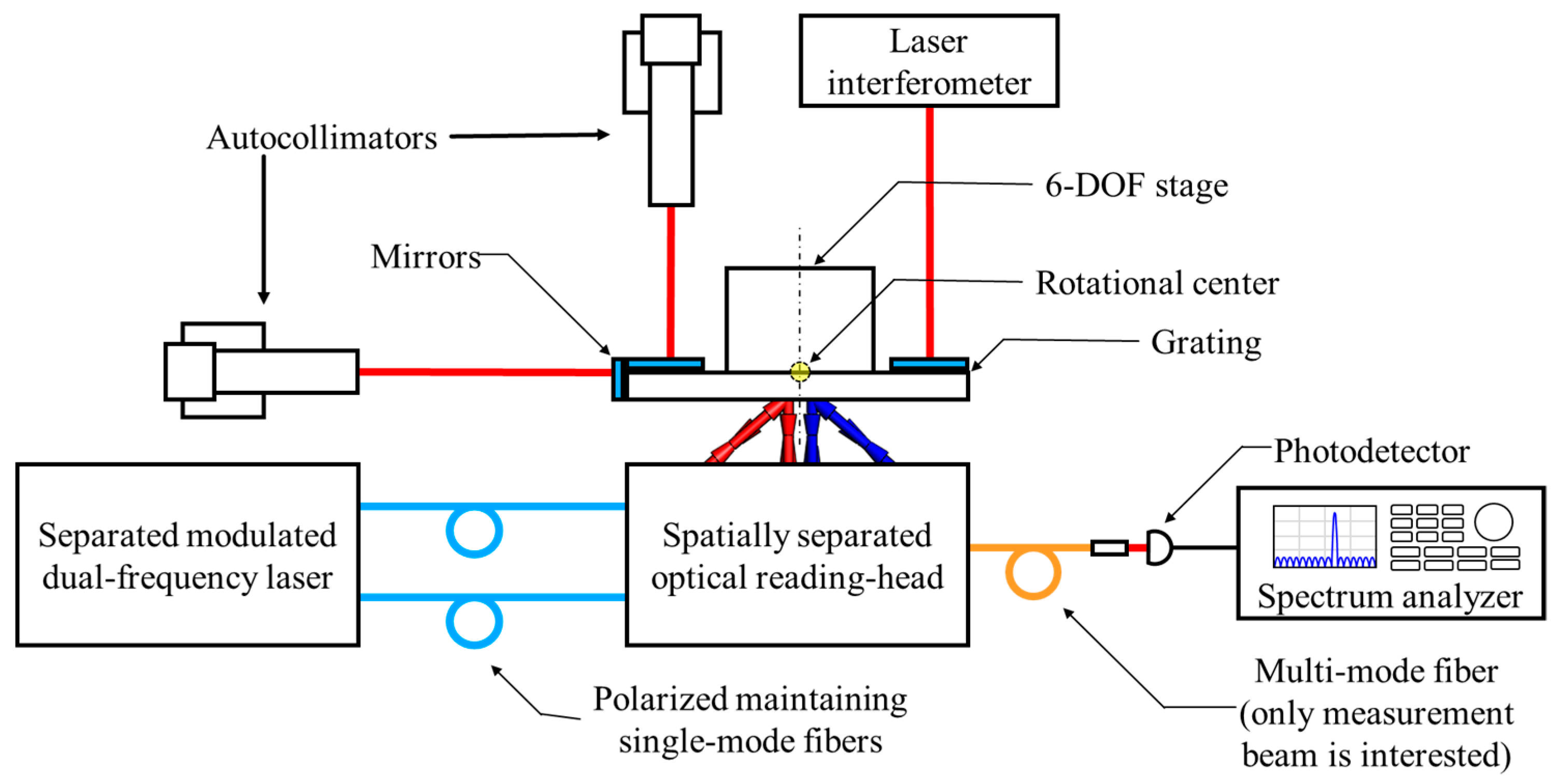
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Carballo, J.A.; Chan, W.T.J.; Gargini, P.A.; Kahng, A.B.; Nath, S. ITRS 2.0: Toward a re-framing of the semiconductor technology roadmap. In Proceedings of the 2014 IEEE 32nd International Conference on Computer Design, Seoul, South Korea, 19–22 October 2014; pp. 139–146. [Google Scholar]
- Gao, W.; Kim, S.W.; Bosse, H.; Haitjema, H.; Chen, Y.L.; Lu, X.D.; Knapp, W.; Weckenmann, A.; Estler, W.T.; Kunzmann, H. Measurement technologies for precision positioning. CIRP Ann. 2015, 64, 773–796. [Google Scholar] [CrossRef]
- Deng, J.; Yan, X.; Wei, C.; Lu, Y.; Li, M.; Xiang, X.; Jia, W.; Zhou, C. Eightfold optical encoder with high-density grating. Appl. Opt. 2018, 57, 2366–2375. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-L.; Liu, C.-H.; Jywe, W.-Y.; Wang, M.-S.; Fang, T.-H. Development of a three-degree-of-freedom laser linear encoder for error measurement of a high precision stage. Rev. Sci. Instrum. 2007, 78, 066103. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.B.; Kim, G.H.; Lee, S.K. Design and construction of a single unit multi-function optical encoder for a six-degree-of-freedom motion error measurement in an ultraprecision linear stage. Meas. Sci. Technol. 2011, 22, 105901. [Google Scholar] [CrossRef]
- Li, X.; Gao, W.; Muto, H.; Shimizu, Y.; Ito, S.; Dian, S. A six-degree-of-freedom surface encoder for precision positioning of a planar motion stage. Precis. Eng. 2013, 37, 771–781. [Google Scholar] [CrossRef]
- Li, X.; Shimizu, Y.; Ito, T.; Cai, Y.; Ito, S.; Gao, W. Measurement of six-degree-of-freedom planar motions by using a multiprobe surface encoder. Opt. Eng. 2014, 53, 122405. [Google Scholar] [CrossRef]
- Kao, C.-F.; Chang, C.C.; Lu, M.-H. Double-diffraction planar encoder by conjugate optics. Opt. Eng. 2005, 44, 023603. [Google Scholar]
- Feng, C.; Zeng, L.; Wang, S. Heterodyne planar grating encoder with high alignment tolerance, especially insensitivity to grating tilts. In Eighth International Symposium on Precision Engineering Measurement and Instrumentation, Proceedings of the SPIE, 8–11 August 2012, Chengdu, China; SPIE Press: Bellingham, WA, USA, 2013; p. 87593L. [Google Scholar]
- De Groot, P.J.; Badami, V.G.; Liesener, J. Concepts and geometries for the next generation of precision heterodyne optical encoders. In Proceedings of the Annual Meeting of the American Society for Precision Engineering (ASPE 2016), Portland, OR, USA, 23–28 October 2016; pp. 146–149. [Google Scholar]
- Tan, J.; Hu, P.; Xing, X. Two-Degree-of-Freedom Anti-Optical Frequency Heterodyne Grating Interferometry and Measuring System. Chinese Patent CN 103,604,375A, 26 February 2014. (In Chinese). [Google Scholar]
- Xing, X.; Chang, D.; Hu, P.; Tan, J. Spatial separated heterodyne grating interferometer for eliminating periodic nonlinear errors. Opt. Express 2017, 25, 31384. [Google Scholar] [CrossRef] [PubMed]
- Guan, J.; Köchert, P.; Weichert, C.; Köning, R.; Siaudinyte, L.; Flügge, J. A differential interferometric heterodyne encoder with 30 picometer periodic nonlinearity and sub-nanometer stability. Precis. Eng. 2017, 50, 114–118. [Google Scholar] [CrossRef]
- Cheng, F.; Fan, K. Linear diffraction grating interferometer with high alignment tolerance and high accuracy. Appl. Opt. 2011, 50, 4550. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Azzam, R.M.A. Polarization properties of corner-cube retroreflectors: Theory and experiment. Appl. Opt. 1997, 36, 1553. [Google Scholar] [CrossRef] [PubMed]
- Keysight Technologies. High Performance Laser Interferometer Positioning for VMEbus Systems—Technical Overview. Available online: https://literature.cdn.keysight.com/litweb/pdf/5965-1569E.pdf (accessed on 22 October 2018).










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, D.; Xing, X.; Hu, P.; Wang, J.; Tan, J. Double-Diffracted Spatially Separated Heterodyne Grating Interferometer and Analysis on its Alignment Tolerance. Appl. Sci. 2019, 9, 263. https://doi.org/10.3390/app9020263
Chang D, Xing X, Hu P, Wang J, Tan J. Double-Diffracted Spatially Separated Heterodyne Grating Interferometer and Analysis on its Alignment Tolerance. Applied Sciences. 2019; 9(2):263. https://doi.org/10.3390/app9020263
Chicago/Turabian StyleChang, Di, Xu Xing, Pengcheng Hu, Jianing Wang, and Jiubin Tan. 2019. "Double-Diffracted Spatially Separated Heterodyne Grating Interferometer and Analysis on its Alignment Tolerance" Applied Sciences 9, no. 2: 263. https://doi.org/10.3390/app9020263
APA StyleChang, D., Xing, X., Hu, P., Wang, J., & Tan, J. (2019). Double-Diffracted Spatially Separated Heterodyne Grating Interferometer and Analysis on its Alignment Tolerance. Applied Sciences, 9(2), 263. https://doi.org/10.3390/app9020263