Improved Defect Detection Using Adaptive Leaky NLMS Filter in Guided-Wave Testing of Pipelines


Abstract
:1. Introduction
2. Background Information
- The energy of waves received from axisymmetric features (e.g., pipe end) are overwhelmed by the T(0,1) with little variance caused by the existing coherent noise of flexural waves.
- Defect signals have a mixture of both flexural and torsional wave modes; nonetheless, if the cross-sectional area (CSA) of the defect is wide, the T(0,1) will have a greater effect than the flexurals. This is the main reason why adding all the transducers tends to increase the overall energy of T(0,1) while reducing the effect of flexurals.
- Noise regions are mostly consistent with flexurals with almost no axisymmetric wave being detected.
3. Methodology
- In the first scenario, the signal from a feature in the backward test direction is detected by the rings. The energy of this signal can be reduced by using the same phase-delaying algorithm in the excitation sequence.
- The second scenario is when the same echo is past the tool. This signal will have the same characteristics as forward propagation and thus cannot be canceled. These are typically known as mirror signals.
Adaptive Filtering
- S(t) Signals of interest/anomalies: Highly correlated and in phase
- N(t) Flexural and other noise: That are not correlated to S(t). Furthermore, noise sources of two signals are correlated to each other.
4. Test Setup
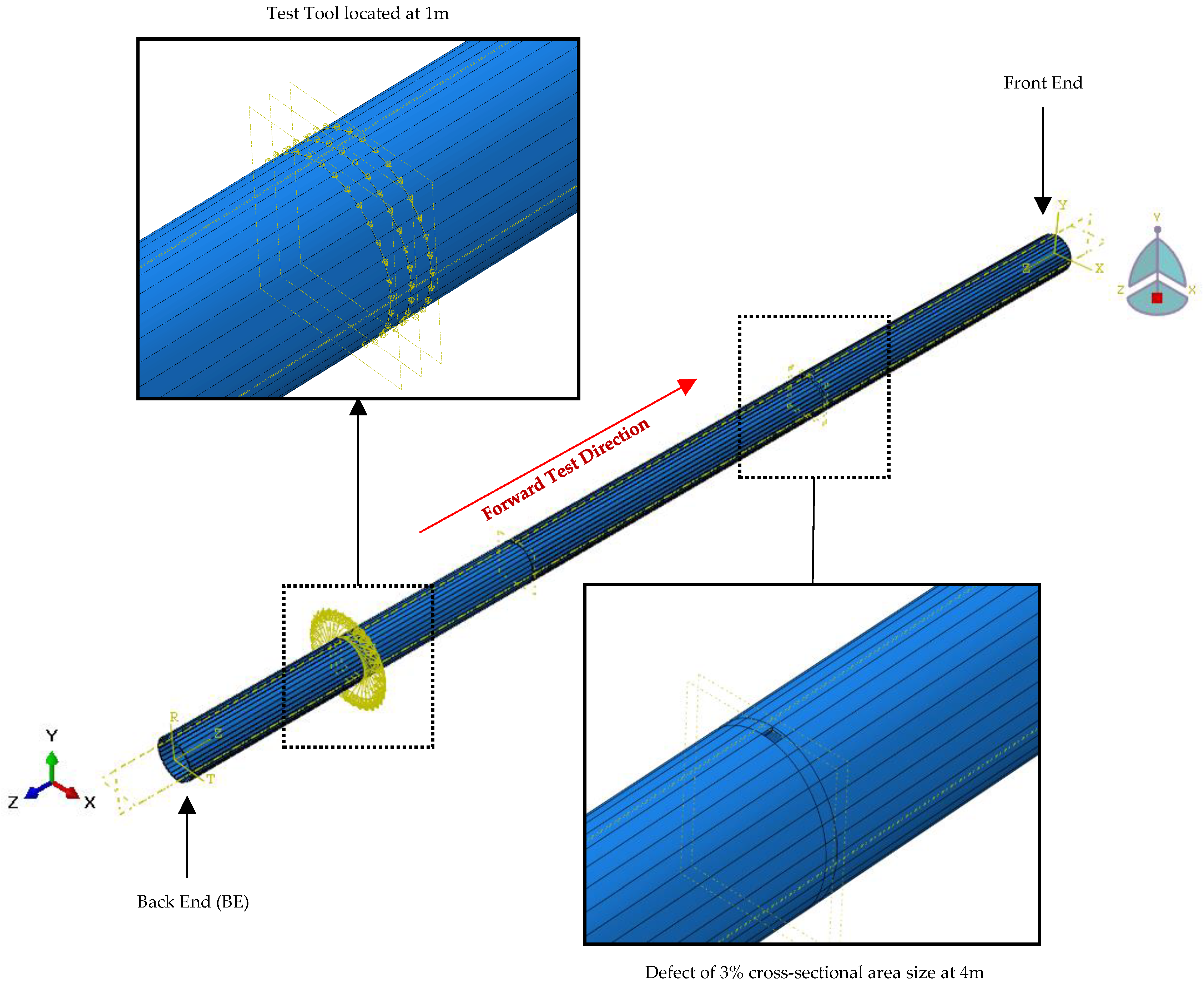
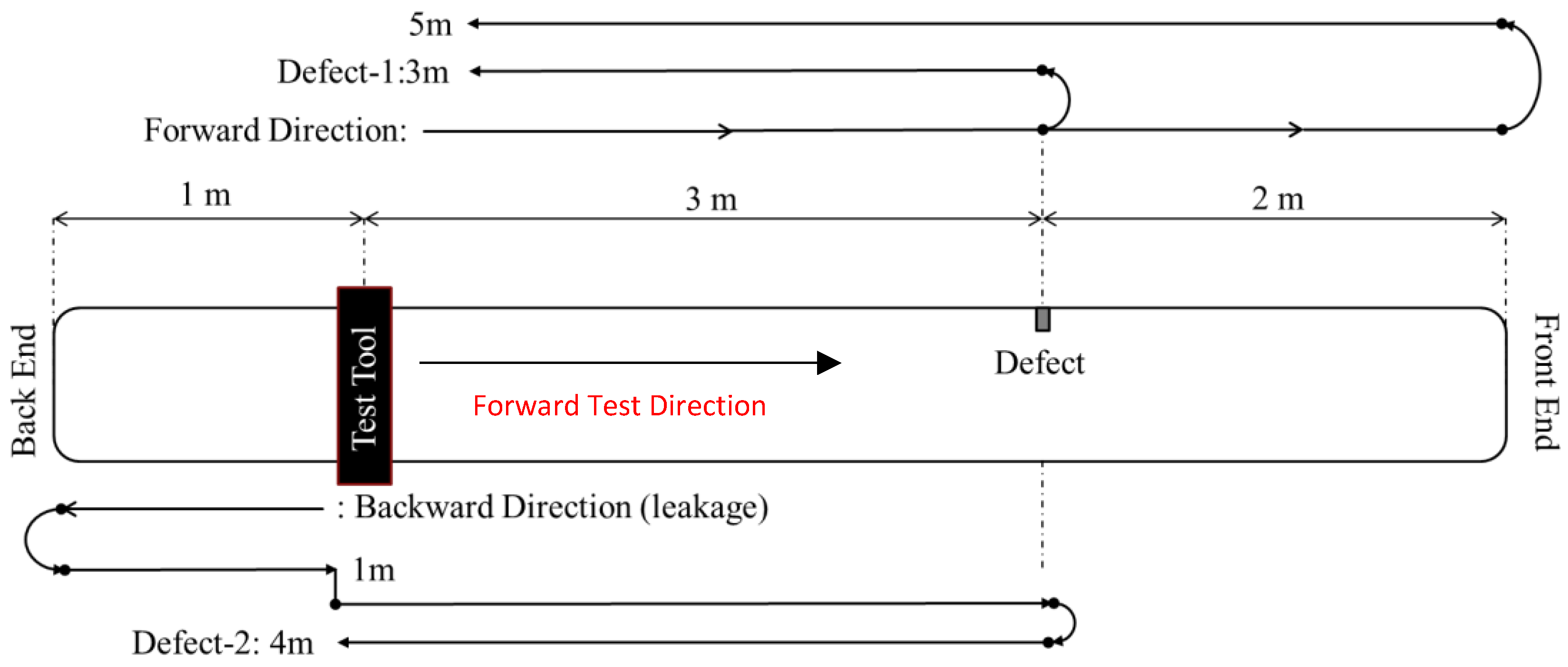
4.1. Finite Element Model
4.2. Experimental Trials
5. Results
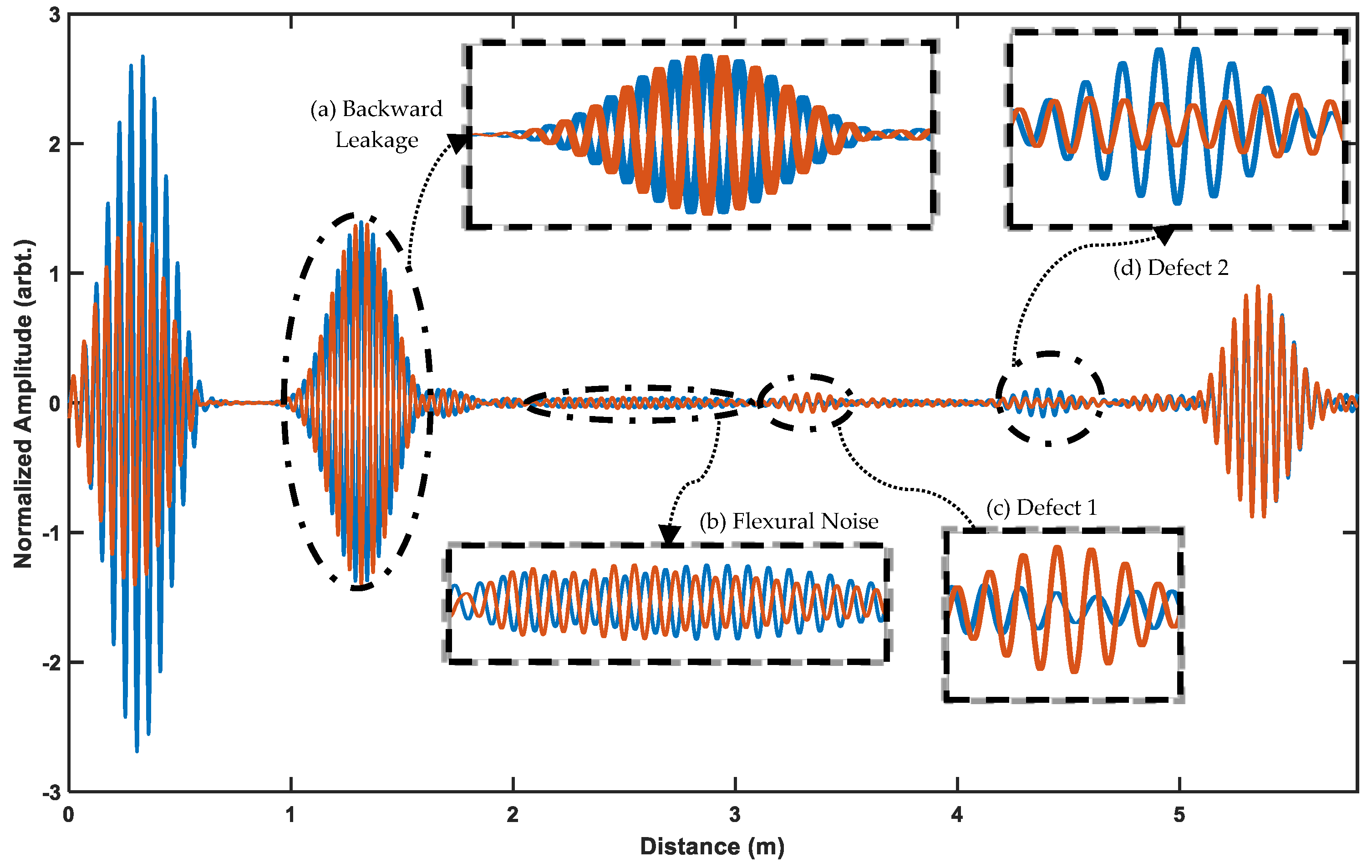
5.1. Example Test Case
5.2. Cancellation of Backward Leakage
5.3. Adaption of Filter Weights
5.4. Results Comparison
5.4.1. Parameter Selection
- Model Parameters: The optimum parameters are achieved by using a brute force search algorithm to find the parameters which give the maximum SNR in the FEM test. The main goal of this test was to assess the response of the algorithm by fixing the parameters to an optimum solution created by the FEM.
- Experimental Parameters: The brute force search algorithm was performed on the 4% CSA sample to find parameters that result in most enhancements of SNR for each frequency. The goal was to find the best testing frequency where the least variations in the enhancements are observed and assess whether fixed parameters can enhance the SNR of defects with lower CSA size (3% test case).
5.4.2. Model-Parameters
- In defects above 5% CSA, the algorithm enhances the results using all frequencies. For defects with CSA size of lower than 4%, the algorithm can enhance the SNR of most frequencies except for 30, 32, 34, and 38 kHz.
- Except from the case of 3% CSA error, both maximum SNR and maximum enhancements are achieved using 34 and 38 kHz in the tests. In the 3% CSA test, the maximum enhancement is for 30 kHz; nonetheless, the final SNRs of 34 and 38 kHz are greater.
- The variations in the case of 30 kHz are less in comparison to all other cases, as shown in Figure 14b.
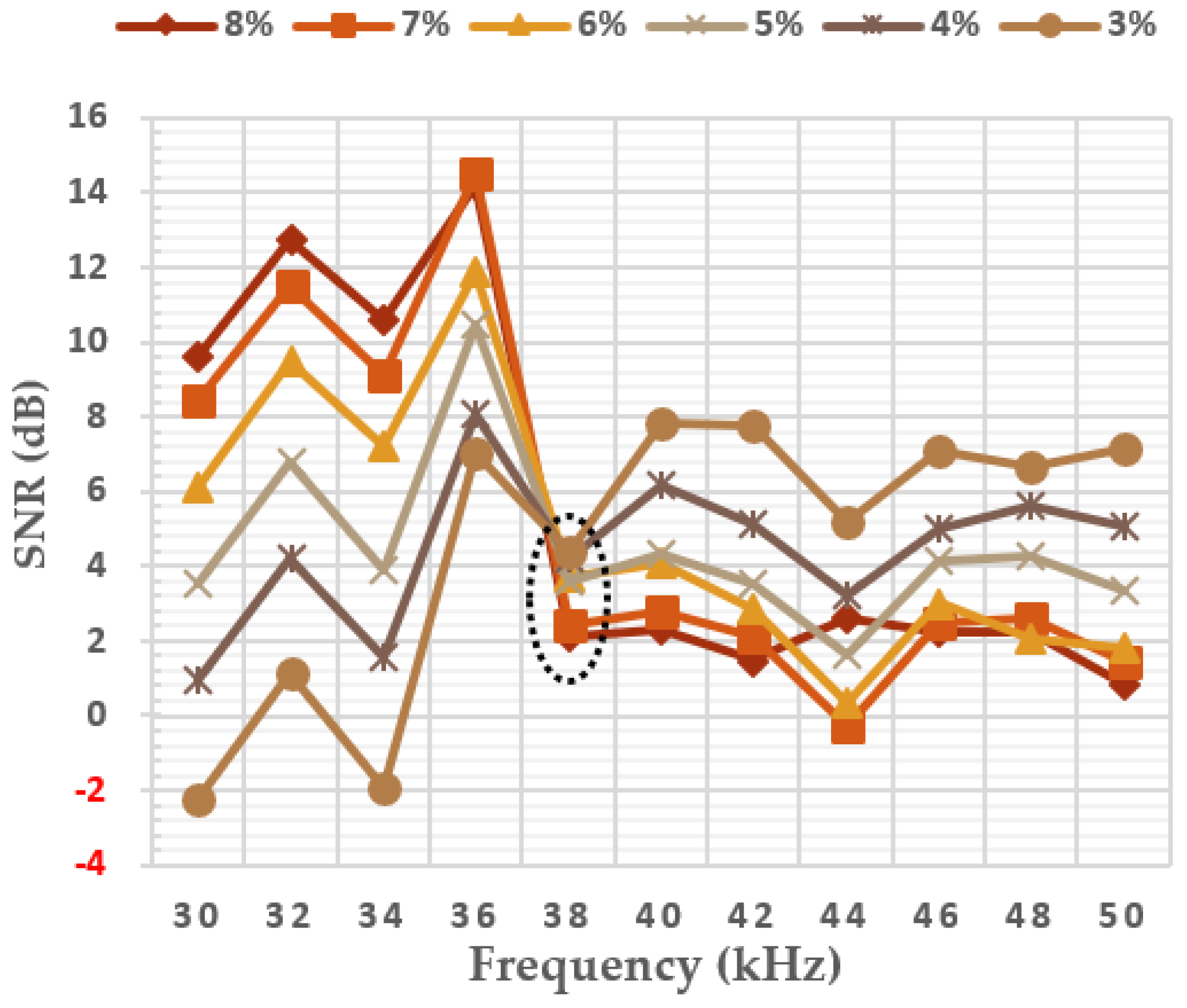
5.4.3. Experimental Parameters
- For defects with higher CSA error size (above 5%), lower frequencies tend to achieve higher SNR after processing where the defect signal was enhanced by at least a factor of 2. The greatest enhancement is achieved from 34 kHz and the maximum SNR is achieved from 36 kHz for these signals.
- Although higher frequencies will result in lower SNR, their enhancements are approximately the same for different sizes of the defect. Nonetheless, their final SNR is almost always lower than all other frequencies, especially in the cases of frequencies above 46 kHz.
- For 3% and 4% CSA defects, the greatest enhancement and gain are achieved using the 38 kHz frequency. Furthermore, as can be seen in Figure 15b, this frequency is affected less with regards to the CSA loss of the defect.
5.4.4. Discussion
- If any low order flexurals or noise are overlapping in the input and reference signals, they will not be removed and might be amplified.
- Although some flexural signals will remain in the resultant signal, there is an option of further post-processing to enhance the SNR. Such is the case of the noise region located at 2–2.5 m in case Figure 18, where it is clearly dispersed at the end of its window, and the case of 1.5–2 m in Figure 19, which results from backward leakage. Therefore, by considering other characteristics in the signal, the results can be post-processed to distinguish different modes and further increase the SNR of the test.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Order (#) | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|
| Maximum SNR (dB) | 8.31 | 8.27 | 7.76 | 7.32 | 6.78 | 6.07 | 5.33 | 5.07 | 5.02 |
Appendix B
| CSA | Frequency (kHz) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| (%) | 30 | 32 | 34 | 36 | 38 | 40 | 42 | 44 | 46 | 48 | 50 |
| 8 | 14.68 | 16.81 | 19.64 | 21.04 | 21.73 | 22.28 | 21.84 | 20.47 | 18.33 | 15.70 | 12.63 |
| 7 | 13.55 | 15.50 | 18.19 | 19.69 | 20.64 | 21.39 | 20.97 | 19.48 | 17.20 | 14.53 | 11.38 |
| 6 | 11.70 | 13.57 | 15.89 | 17.88 | 18.78 | 19.33 | 18.75 | 17.27 | 15.06 | 12.40 | 9.24 |
| 5 | 9.29 | 11.09 | 13.71 | 15.00 | 16.05 | 16.74 | 16.05 | 14.40 | 12.07 | 9.38 | 6.17 |
| 4 | 7.13 | 8.84 | 11.12 | 12.15 | 13.13 | 13.76 | 13.23 | 11.73 | 9.50 | 6.84 | 3.50 |
| 3 | 4.29 | 5.97 | 8.15 | 8.62 | 9.08 | 9.51 | 9.00 | 7.60 | 5.43 | 2.82 | −0.51 |

Appendix C
| Frequency (kHz) | Step Size | Leakage | Compensation |
|---|---|---|---|
| 30 (Model) | 0.01 | 0.96 | 0.01 |
| 30 | 0.01 | 0.61 | 0.21 |
| 32 | 0.01 | 0.46 | 0.21 |
| 34 | 0.01 | 0.46 | 0.26 |
| 36 | 0.01 | 0.56 | 0.06 |
| 38 | 0.16 | 0.81 | 0.01 |
| 40 | 0.86 | 0.76 | 0.01 |
| 42 | 1.41 | 0.91 | 0.01 |
| 44 | 1.21 | 0.96 | 0.01 |
| 46 | 1.46 | 0.96 | 0.01 |
| 48 | 1.46 | 0.96 | 0.01 |
| 50 | 1.46 | 0.96 | 0.01 |
References
- Lowe, M.J.S.; Alleyne, D.N.; Cawley, P. Defect detection in pipes using guided waves. Ultrasonics 1998, 36, 147–154. [Google Scholar] [CrossRef]
- Pavlakovic, B. Signal Processing Arrangment. US Patent 2006/0203086 A1, 14 Septenber 2006. [Google Scholar]
- ASTM Standard E2775-16. Standard Practice for Guided Wave Testing of above Ground steel Pipeword Using Piezoelectric Effect Transducer; ASTM: West Conshohocken, PA, USA, 2017. [Google Scholar]
- Yücel, M.K.; Fateri, S.; Legg, M.; Wilkinson, A.; Kappatos, V.; Selcuk, C.; Gan, T.H. Coded Waveform Excitation for High-Resolution Ultrasonic Guided Wave Response. IEEE Trans. Ind. Inform. 2016, 12, 257–266. [Google Scholar] [CrossRef]
- Fateri, S.; Boulgouris, N.V.; Wilkinson, A.; Balachandran, W.; Gan, T.H. Frequency-sweep examination for wave mode identification in multimodal ultrasonic guided wave signal. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 1515–1524. [Google Scholar] [CrossRef]
- Thornicroft, K. Ultrasonic Guided Wave Testing of Pipelines Using a Broadband Excitation. Ph.D Thesis, Brunel University London, London, UK, 2015. [Google Scholar]
- Malo, S.; Fateri, S.; Livadas, M.; Mares, C.; Gan, T. Wave Mode Discrimination of Coded Ultrasonic Guided Waves using Two-Dimensional Compressed Pulse Analysis. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1092–1101. [Google Scholar] [CrossRef] [PubMed]
- Pedram, S.K.; Fateri, S.; Gan, L.; Haig, A.; Thornicroft, K. Split-spectrum processing technique for SNR enhancement of ultrasonic guided wave. Ultrasonics 2018, 83, 48–59. [Google Scholar] [CrossRef]
- Mallet, R. Signal Processing for Non-Destructive Testing. Ph.D Thesis, Brunel Unviersity, London, UK, 2007. [Google Scholar]
- Hayes, M.H. Statistical Digital Signal Processing and Modeling; John Wiley & Sons, Inc.: New York, NY, USA, 1997. [Google Scholar]
- Bellanger, M.G. Adaptive Digital Filters, Revised and Expanded, 2nd ed.; Marcel Dekker, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Widrow, B.; Glover, J.R.; McCool, J.M.; Kaunitz, J.; Williams, C.S.; Hearn, R.H.; Zeidler, J.R.; Dong, J.E.; Goodlin, R.C. Adaptive Noise Cancelling: Principles and Applications. Proc. IEEE 1975, 63, 1692–1716. [Google Scholar] [CrossRef]
- Rajesh, P.; Umamaheswari, K.; Kumar, V.N. A Novel Approach of Fetal ECG Extraction Using Adaptive Filtering. Int. J. Inf. Sci. Intell. Syst. 2014, 3, 55–70. [Google Scholar]
- Hernandez, W. Improving the response of a wheel speed sensor using an adaptive line enhancer. Measurement 2003, 33, 229–240. [Google Scholar] [CrossRef]
- Ramli, R.M.; Noor, A.O.A.; Samad, S.A. A Review of Adaptive Line Enhancers for Noise Cancellation. Aust. J. Basic Appl. Sci. 2012, 6, 337–352. [Google Scholar]
- Murano, K.; Unagami, S.; Amano, F. Echo Cancellation and Applications. IEEE Commun. Mag. 1990, 28, 49–55. [Google Scholar] [CrossRef]
- Messerrschmi, D. Echo Cancellation in Speech and Data Transmission. IEEE J. Sel. Areas Commun. 1984, 2, 283–297. [Google Scholar] [CrossRef]
- Bürger, W. Space-Time Adaptive Processing: Fundamentals. Adv. Radar Signal Data Process. 2006, 6, 1–14. [Google Scholar]
- Schwark, C.; Cristallini, D. Advanced multipath clutter cancellation in OFDM-based passive radar systems. In Proceedings of the 2016 IEEE Radar Conference (RadarConf 2016), Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar]
- Zhu, Y.; Weight, J.P. Ultrasonic nondestructive evaluation of highly scattering materials using adaptive filtering and detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1994, 41, 26–33. [Google Scholar]
- Monroe, D.; Ahn, I.S.; Lu, Y. Adaptive filtering and target detection for ultrasonic backscattered signal. In Proceedings of the 2010 IEEE International Conference on Electro/Information Technology, Normal, IL, USA, 20–22 May 2010. [Google Scholar]
- Haykin, S. Adaptive Filter Theory, 5th ed.; Pearson: Harlow, UK, 2014. [Google Scholar]
- Cioffi, J. Limited-Precision Effects in Adaptive Filtering [invited paper, special issue on adaptive filtering. IEEE Trans. Circuits Syst. 1987, 34, 821–833. [Google Scholar] [CrossRef]
- Sayed, A.H.; Al-Naffouri, T.Y. Mean-square analysis of normalized leaky adaptive filters. In Proceedings of the 2001 IEEE International Conference on Acoustics, Speech, and Signal Processing (Cat. No.01CH37221), Salt Lake City, UT, USA, 7–11 May 2001; Volume 6, pp. 3873–3876. [Google Scholar]
- Bismor, D.; Pawelczyk, M. Stability Conditions for the Leaky LMS Algorithm Based on Control Theory Analysis. Arch. Acoust. 2016, 41, 731–739. [Google Scholar] [CrossRef] [Green Version]
- Lowe, M.J.S.; Cawley, P. Long Range Guided Wave Inspection Usage—Current Commercial Capabilities and Research Directions; Imperial College London: London, UK, 2006; Available online: http://www3.imperial.ac.uk/pls/portallive/docs/1/55745699.PDF (accessed on 20 November 2018).
- Meitzler, A.H. Mode Coupling Occurring in the Propagation of Elastic Pulses in Wires. J. Acoust. Soc. Am. 1961, 33, 435–445. [Google Scholar] [CrossRef]
- Catton, P. Long Range Ultrasonic Guided Waves for Pipelines Inspection; Brunel University: London, UK, 2009. [Google Scholar]
- Nurmalia. Mode Conversion of torsional Guided Waves for Pipe Inspection: An electromagnetic Acoustic Transducer Technique; Osaka University: Osaka Prefecture, Japan, 2013. [Google Scholar]
- Nakhli Mahal, N.; Mudge, P.; Nandi, A.K. Comparison of coded excitations in the presence of variable transducer transfer functions in ultrasonic guided wave testing of pipelines. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018. [Google Scholar]
- Nakhli Mahal, N.; Muidge, P.; Nandi, A.K. Noise removal using adaptive filtering for ultrasonic guided wave testing of pipelines. In Proceedings of the 57th Annual British Conference on Non-Destructive Testing, Nottingham, UK, 10–12 September 2018; pp. 1–9. [Google Scholar]
- Wilcox, P.D. A rapid signal processing technique to remove the effect of dispersion from guided wave signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 419–427. [Google Scholar] [CrossRef]
- Sanderson, R. A closed form solution method for rapid calculation of guided wave dispersion curves for pipes. Wave Motion 2015, 53, 40–50. [Google Scholar] [CrossRef]
- Wilcox, P.; Lowe, M.; Cawley, P. The effect of dispersion on long-range inspection using ultrasonic guided waves. NDT E Int. 2001, 34, 1–9. [Google Scholar] [CrossRef]
- Guan, R.; Lu, Y.; Duan, W.; Wang, X. Guided waves for damage identification in pipeline structures: A review. Struct. Control Health Monit. 2017, 24, e2007. [Google Scholar] [CrossRef]
- Lowe, M.J.S.; Alleyne, D.N.; Cawley, P. The Mode Conversion of a Guided Wave by a Part-Circumferential Notch in a Pipe. J. Appl. Mech. 1998, 65, 649–656. [Google Scholar] [CrossRef]
- Miao, H.; Huan, Q.; Wang, Q.; Li, F. Excitation and reception of single torsional wave T(0,1) mode in pipes using face-shear d24 piezoelectric ring array. Smart Mater. Struct. 2017, 26, 025021. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar]
- Alleyne, D.N.; Pavlakovic, B.; Lowe, M.J.S.; Cawley, P. Rapid, Long Range Inspection of Chemical Plant Pipework Using Guided Waves. Key Eng. Mater. 2004, 270–273, 434–441. [Google Scholar] [CrossRef]
- Douglas, S.C. Performance Comparison of Two Implementations of the Leaky LMS Adaptive Filter. IEEE Trans. Signal Process. 1997, 45, 2125–2129. [Google Scholar] [CrossRef]
- Cartes, D.A.; Ray, L.R.; Collier, R.D. Experimental evaluation of leaky least-mean-square algorithms for active noise reduction in communication headsets. J. Acoust. Soc. Am. 2002, 111, 1758–1771. [Google Scholar] [CrossRef] [PubMed]
- Kuo, S.M.; Lee, B.H.; Tian, W. Real-Time Digital Signal Processing: Implementations and Applications; John Wiley & Sons: Chichester, UK, 2006. [Google Scholar]
- Ssanalysis. Abaqus/Explicit. Available online: http://www.ssanalysis.co.uk/ (accessed on 20 Nov 2018).
- Teletestndt. Long Range Guided Wave Testing with Teletest Focus+. 2018. Available online: https://www.teletestndt.com/ (accessed on 08 January 2019).
- Alleyne, D.N.; Lowe, M.J.S.; Cawley, P. The Reflection of Guided Waves from Circumferential Notches in Pipes. J. Appl. Mech. 1998, 65, 635–641. [Google Scholar] [CrossRef]
- Lowe, P.S.; Sanderson, R.M.; Boulgouris, N.V.; Haig, A.G. Inspection of Cylindrical Structures Using the First Longitudinal Guided Wave Mode in Isolation for Higher Flaw Sensitivity. IEEE Sens. J. 2016, 16, 706–714. [Google Scholar] [CrossRef]
- Niu, X.; Duan, W.; Chen, H.; Marques, H.R. Excitation and propagation of torsional T (0, 1) mode for guided wave testing of pipeline integrity Excitation and propagation of torsional T (0, 1) mode for guided wave testing of pipeline integrity. Measurement 2018, 131, 341–348. [Google Scholar] [CrossRef]
- Duan, W.; Niu, X.; Gan, T.; Kanfound, J.; Chen, H.-P. A Numerical Study on the Excitation of Guided Waves. Metals 2017, 7, 552. [Google Scholar] [CrossRef]
- Fateri, S.; Lowe, P.S.; Engineer, B.; Boulgouris, N.V. Investigation of ultrasonic guided waves interacting with piezoelectric transducers. IEEE Sens. J. 2015, 15, 4319–4328. [Google Scholar] [CrossRef]
- Alleyne, D.N.; Cawley, P. The excitation of Lamb waves in pipes using dry-coupled piezoelectric transducers. J. Nondestruct. Eval. 1996, 15, 11–20. [Google Scholar] [CrossRef]
- Engineer, B.A. The Mechanical and Resonant Behaviour of a Dry Coupled Thickness-Shear PZT Transducer Used for Guided Wave Testing in Pipe Line. Ph.D Thesis, Brunel University, London, UK, 2013. [Google Scholar]
- Mathworks. Matlab. Available online: https://uk.mathworks.com/products/matlab.html (accessed on 18 April 2018).



















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nakhli Mahal, H.; Yang, K.; Nandi, A.K. Improved Defect Detection Using Adaptive Leaky NLMS Filter in Guided-Wave Testing of Pipelines. Appl. Sci. 2019, 9, 294. https://doi.org/10.3390/app9020294
Nakhli Mahal H, Yang K, Nandi AK. Improved Defect Detection Using Adaptive Leaky NLMS Filter in Guided-Wave Testing of Pipelines. Applied Sciences. 2019; 9(2):294. https://doi.org/10.3390/app9020294
Chicago/Turabian StyleNakhli Mahal, Houman, Kai Yang, and Asoke K. Nandi. 2019. "Improved Defect Detection Using Adaptive Leaky NLMS Filter in Guided-Wave Testing of Pipelines" Applied Sciences 9, no. 2: 294. https://doi.org/10.3390/app9020294
APA StyleNakhli Mahal, H., Yang, K., & Nandi, A. K. (2019). Improved Defect Detection Using Adaptive Leaky NLMS Filter in Guided-Wave Testing of Pipelines. Applied Sciences, 9(2), 294. https://doi.org/10.3390/app9020294