Approach of Coordinated Control Method for Over-Actuated Vehicle Platoon based on Reference Vector Field



Abstract
:Featured Application
Abstract
1. Introduction
2. Reference Vector Field of Vehicle Following
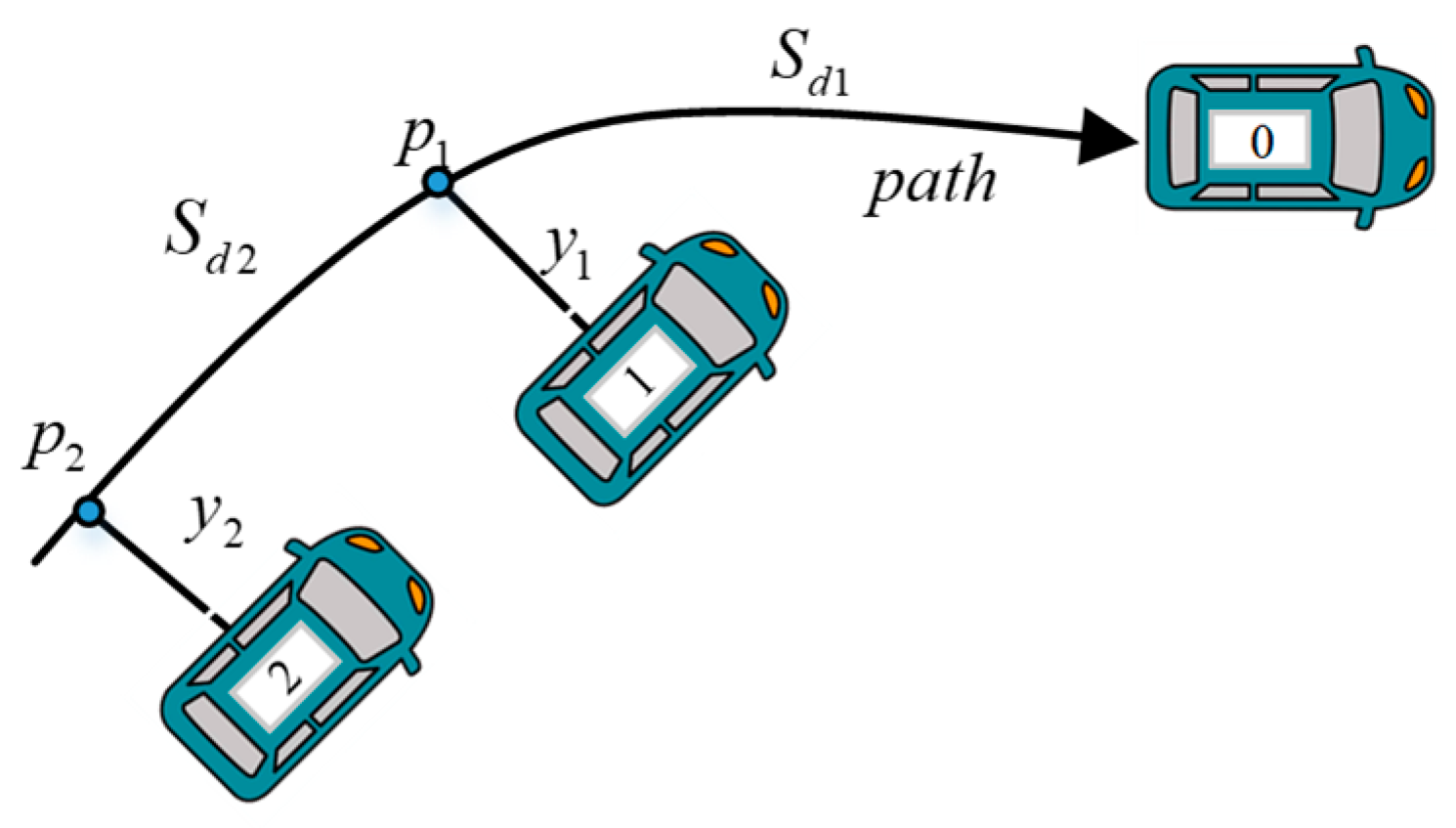
2.1. Spacing Control Strategy of Platoon
- (1)
- In the path-following strategy, the position of the following vehicle can be represented by the distance in the path coordinate system relative to the leading vehicle. The interaction between followers is reduced based on this strategy. Therefore, the control error will not be amplified with the transmission of the platoon, which weakens the importance of platoon stability.
- (2)
- The relative heading angle of the preceding vehicle is hard to measure, which means that the following vehicle cannot get enough and proper information for direct vehicle-following.
- (3)
- It is much easier for the path-following strategy to modify the feedback input to improve the following performance. The reference path can be replanted according to the surround information and traffic rules.
- (4)
- The path-following strategy requires that the path information of leading vehicle should be saved and updated in following vehicle’s controller. When compared with the path-following approach, the direct vehicle-following strategy needs less data, so it is more suitable for the sample driving condition, like longitudinal following condition.
2.2. Particle Dynamic Model and Reference Vector Field
- (1)
- Assuming that the initial error vector e is 0, the error can be kept at 0 by controlling value u1.
- (2)
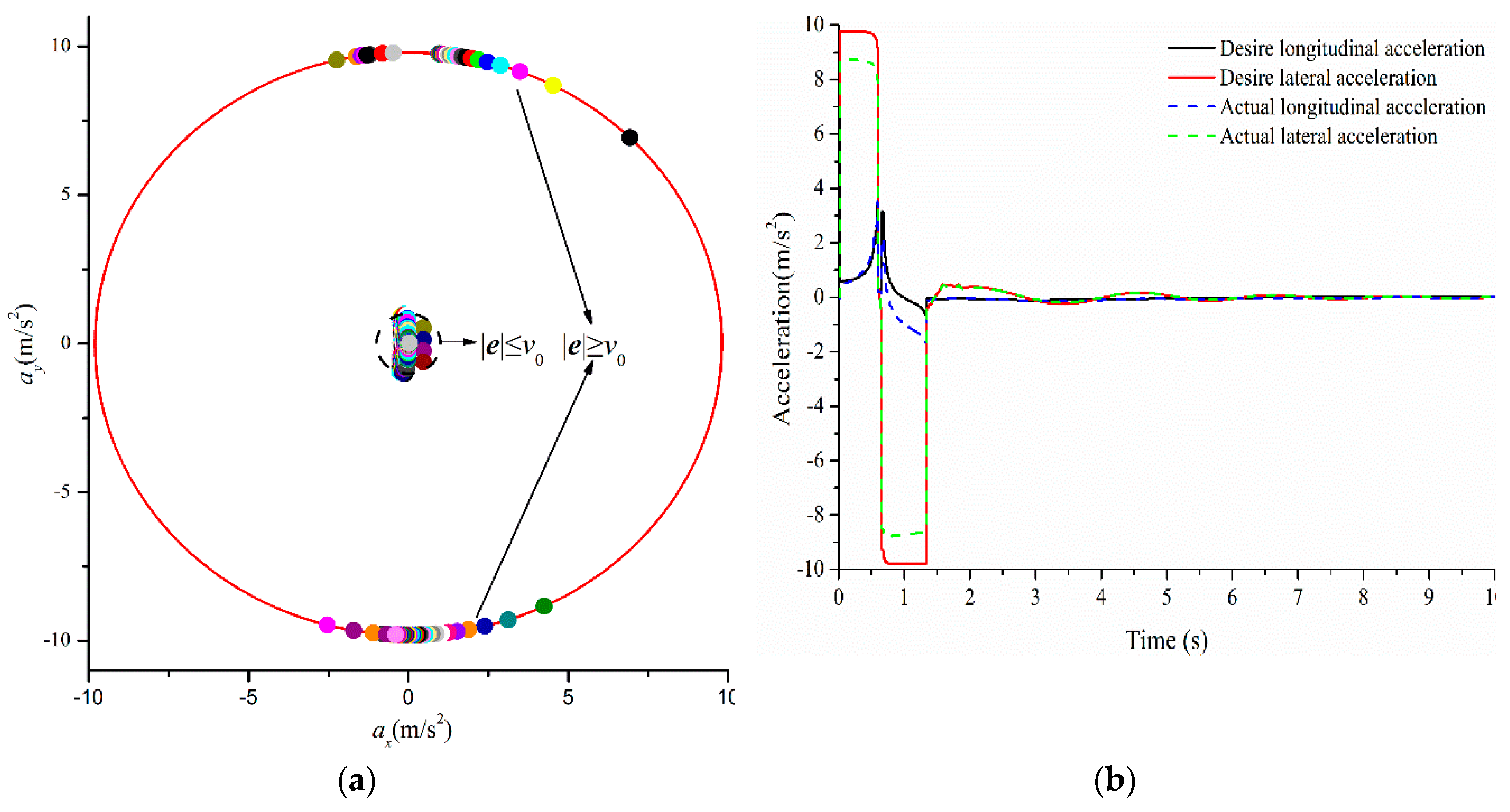
- Assuming that the initial error vector e is not 0, thenwhere the first item of control u is based on the position feedback information of the vehicle, and the second item is used to eliminate the initial error. The usage of the friction circle is as shown in Figure 3.
2.3. Sufficient Conditions for Following Errors’ Convergence
3. Dynamic Model and Integrated Controller of FWIDSV
3.1. Following Control Layer
3.2. Tire Force Allocator Layer
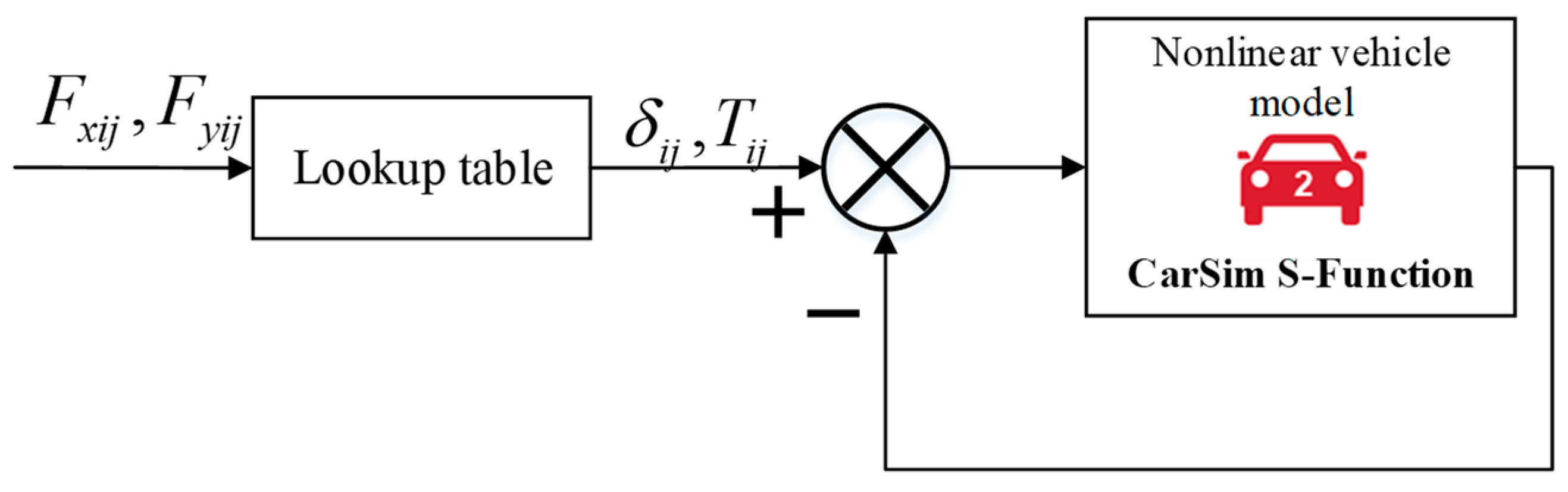
3.3. Actuator Controller
4. Simulation Validation
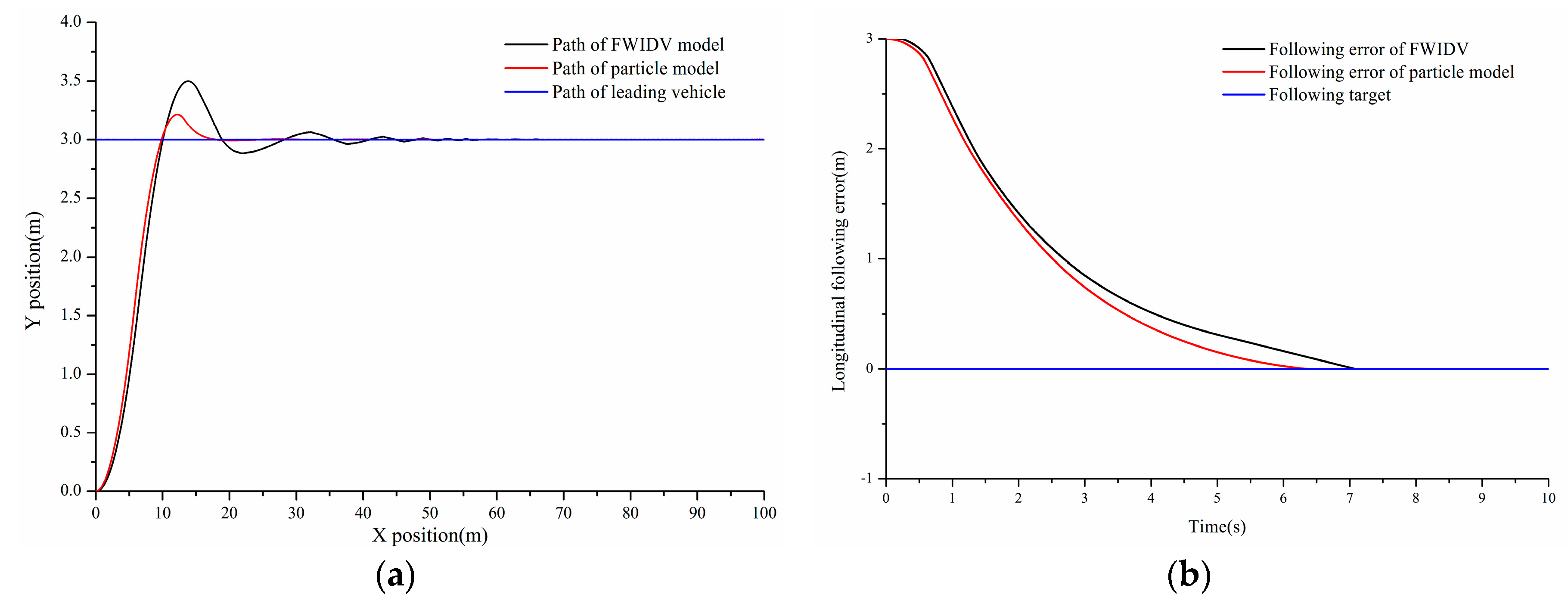
4.1. Intelligent Cruise Control of Single Following Vehicle
4.2. Intelligent Cruise Control in Curve Road
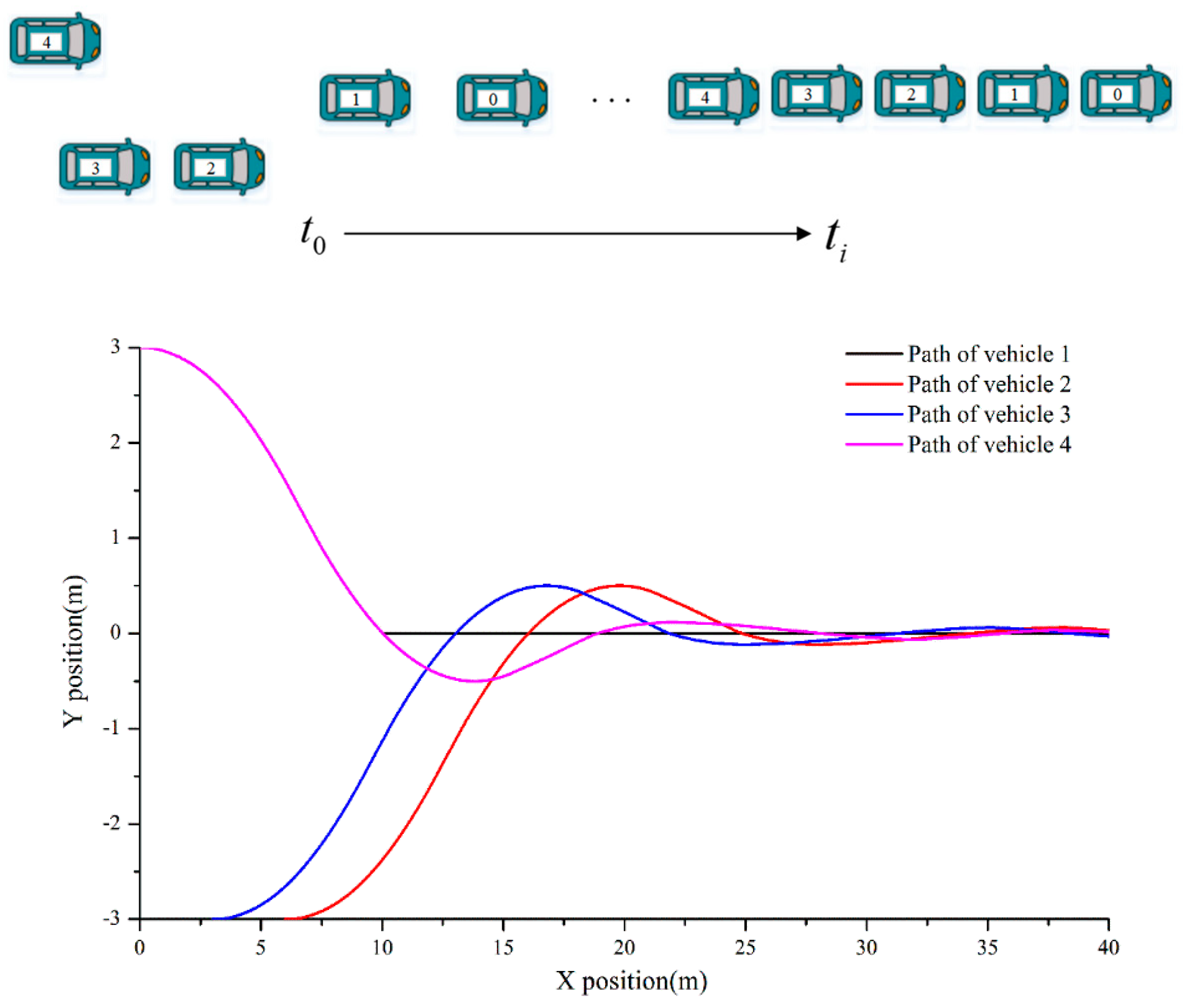
4.3. Merging of the Platoon
5. Conclusions
- Through simulation in ICC scenarios, the proposed control method shows great performance, indicating that a reasonable RVF has good applicability in the ICC scenarios. It can be found that the tire force is effectively distributed, so that the path tracking and spacing maintaining are conducted simultaneously. The error can be effectively converged by RVF.
- The desired acceleration from the RVF is achieved by constructing the FWIDSV integrated controller. The LQP-based tire force distribution method and the linerazing constraint avoid the problem of actuator saturation, thus ensuring the safety and stability of FWIDSV. It should be pointed out that there are reasonable errors between the desired accelerations obtained from following control layer and the actual accelerations of FWIDSV, which result form the hysteresis, non-linearity, and motion resistance of the execution system.
- In the platoon merging scenario, the following FWIDSVs are brought together in a line from different initial points, which means that FWIDSV platoon coordination and the tracking method based on RVF demonstrate great application potential, and can realize complex and practical driving tasks.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shladover, S.E.; Nowakowski, C.; Lu, X.Y.; Ferlis, R. Cooperative adaptive cruise control definitions and operating concepts. Transp. Res. Rec. J. Transp. Res. Board 2015, 2489, 145–152. [Google Scholar] [CrossRef]
- Gao, F.; Li, S.E.; Zheng, Y.; Kum, D. Robust control of heterogeneous vehicular platoon with uncertain dynamics and communication delay. IET Intell. Transp. Syst. 2016, 10, 503–513. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.; Shladover, S.E.; Lu, X.Y.; Ferlis, R.E. Impact of cooperative adaptive cruise control on multilane freeway merge capacity. J. Intell. Transp. Syst. 2018, 22, 263–275. [Google Scholar] [CrossRef]
- Arnaout, G.M.; Arnaout, J.P. Exploring the effects of cooperative adaptive cruise control on highway traffic flow using microscopic traffic simulation. Transp. Plan. Technol. 2014, 37, 186–199. [Google Scholar] [CrossRef]
- Khatir, M.E.; Davison, E.J. A decentralized lateral-longitudinal controller for a platoon of vehicles operating on a plane. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 5891–5896. [Google Scholar] [CrossRef]
- Englund, C.; Chen, L.; Ploeg, J.; Semsar-Kazerooni, E.; Voronov, A.; Bengtsson, H.H.; Didoff, J. The grand cooperative driving challenge 2016: Boosting the introduction of cooperative automated vehicle. IEEE Wirel. Commun. 2016, 23, 146–152. [Google Scholar] [CrossRef]
- Chang, C.; Yuan, Z. Combined longitudinal and lateral control of vehicle platoons. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control, Dalian, China, 25–27 December 2017; pp. 848–853. [Google Scholar]
- Fujioka, T.; Suzuki, K. Control of longitudinal and lateral platoon using sliding control. Veh. Syst. Dyn. 1994, 23, 647–664. [Google Scholar] [CrossRef]
- Rajamani, R.; Tan, H.S.; Law, B.K.; Zhang, W.B. Demonstration of integrated longitudinal and lateral control for the operation of automated vehicles in platoons. IEEE Trans. Control Syst. Technol. 2000, 8, 695–708. [Google Scholar] [CrossRef]
- Shuai, Z.; Zhang, H.; Wang, J.; Li, J.; Ouyang, M. Lateral motion control for four-wheel-independent-drive electric vehicles using optimal torque allocation and dynamic message priority scheduling. Control Eng. Pract. 2014, 24, 55–66. [Google Scholar] [CrossRef]
- Huang, B.; Wu, S.; Huang, S.; Fu, X. Lateral stability control of four-wheel independent drive electric vehicles based on model predictive control. Math. Probl. Eng. 2018, 2018, 6080763. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K. An adaptive hierarchical trajectory Following control approach of autonomous four-wheel independent drive electric vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2482–2492. [Google Scholar] [CrossRef]
- Gordon, T.J.; Best, M.C.; Dixon, P.J. An automated driver based on convergent vector fields. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2002, 216, 329–347. [Google Scholar] [CrossRef] [Green Version]
- Pamosoaji, A.K.; Hong, K.S. A path-planning algorithm using vector potential functions in triangular regions. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 832–842. [Google Scholar] [CrossRef]
- Matveev, A.S.; Hoy, M.C.; Savkin, A.V. Extremum seeking navigation without derivative estimation of a mobile robot in a dynamic environmental field. IEEE Trans. Control Syst. Technol. 2016, 24, 1084–1091. [Google Scholar] [CrossRef]
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: A survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef]
- Jansen, W. Lateral Path-Following Control for Automated Vehicle Platoons. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode conrol of rigid maniplators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Song, P.; Tomizuka, M.; Zong, C. A novel integrated chassis controller for full drive-by-wire vehicles. Veh. Syst. Dyn. 2015, 53, 215–236. [Google Scholar] [CrossRef]
- Sakai, S.; Sado, H.; Hori, Y. Dynamic Driving/Braking Force Distribution in Electric Vehicle with Independently Driven Four Wheels. Electr. Eng. Jpn. 2000, 138, 79–89. [Google Scholar] [CrossRef]
- Li, B.; Du, H.; Li, W. A protential field approach-based trajectory control for autonomous electric vehicles with in-wheel motors. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2044–2055. [Google Scholar] [CrossRef]
- Jiang, K. Real-Time Estimation and Diagnosis of Vehicle’s Dynamics States with Low-Cost Sensors in Different Driving Condition. Ph.D. Thesis, Federal University of Minas Gerais, Belo Horizont, Brazil, 2016. [Google Scholar]
- Chen, T.; Xu, X.; Chen, L.; Jiang, H.; Cai, Y.; Li, Y. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles. Mech. Syst. Signal Process. 2018, 101, 377–388. [Google Scholar] [CrossRef]
- Mashadi, B.; Mahmoodi-K, M.; Kakaee, A.H.; Hosseini, R. Vehicle plath following control in the presence of driver inputs. J. Multi-Body Dyn. 2014, 227, 115–132. [Google Scholar] [CrossRef]
- Olia, A.; Razavi, S.; Abdulhai, B.; Abdelgawad, H. Traffic capacity implications of automated vehicles mixed with regular vehicles. J. Intell. Transp. Syst. 2017, 22, 244–262. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbols | Value |
|---|---|
| α | 0.072 |
| β | 1 |
| q | 13 |
| p | 15 |
| Symbols | Meaning | Symbols | Meaning |
|---|---|---|---|
| δij | Steering angles of roadwheels | ayd | Desired lateral acceleration in vehicle coordinate system |
| αij | Tire side angles | Yaw angle acceleration | |
| Longitudinal speed of vehicle | m | Mass | |
| Lateral speed of vehicle | l1 | Front wheelbase | |
| φ | Yaw of the vehicle | l2 | Rear wheelbase |
| Yaw rate of the vehicle | d | Half of the tread | |
| F | The tire forces | μ | Ground adhesion coefficient |
| axd | Desired longitudinal acceleration in vehicle coordinate system | Iz | Yaw inertia |
| Symbols | Descriptions | Values |
|---|---|---|
| M(kg) | Total mass of vehicle | 1020 |
| Iz(kg∙m2) | Moment of inertia around vertical axis | 1020 |
| lf(m) | Front wheelbase | 1.165 |
| lr(m) | Rear wheelbase | 1.165 |
| d(m) | Half of the wheel tread | 0.875 |
| Vehicle ID | Classification | Initial Position | The Pre-set Desired Inter-Vehicular Spacing |
|---|---|---|---|
| 0 | Leading vehicle | 15, 0 | \ |
| 1 | Following vehicle | 10, 0 | 3 |
| 2 | Following vehicle | 6, −3 | 3 |
| 3 | Following vehicle | 3, −3 | 3 |
| 4 | Following vehicle | 0, 3 | 3 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, D.; Gordon, T.; Li, G.; Zong, C. Approach of Coordinated Control Method for Over-Actuated Vehicle Platoon based on Reference Vector Field. Appl. Sci. 2019, 9, 297. https://doi.org/10.3390/app9020297
Liu Y, Zhang D, Gordon T, Li G, Zong C. Approach of Coordinated Control Method for Over-Actuated Vehicle Platoon based on Reference Vector Field. Applied Sciences. 2019; 9(2):297. https://doi.org/10.3390/app9020297
Chicago/Turabian StyleLiu, Yang, Dong Zhang, Timothy Gordon, Guiyuan Li, and Changfu Zong. 2019. "Approach of Coordinated Control Method for Over-Actuated Vehicle Platoon based on Reference Vector Field" Applied Sciences 9, no. 2: 297. https://doi.org/10.3390/app9020297
APA StyleLiu, Y., Zhang, D., Gordon, T., Li, G., & Zong, C. (2019). Approach of Coordinated Control Method for Over-Actuated Vehicle Platoon based on Reference Vector Field. Applied Sciences, 9(2), 297. https://doi.org/10.3390/app9020297