Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO

Abstract
:1. Introduction
2. Methods
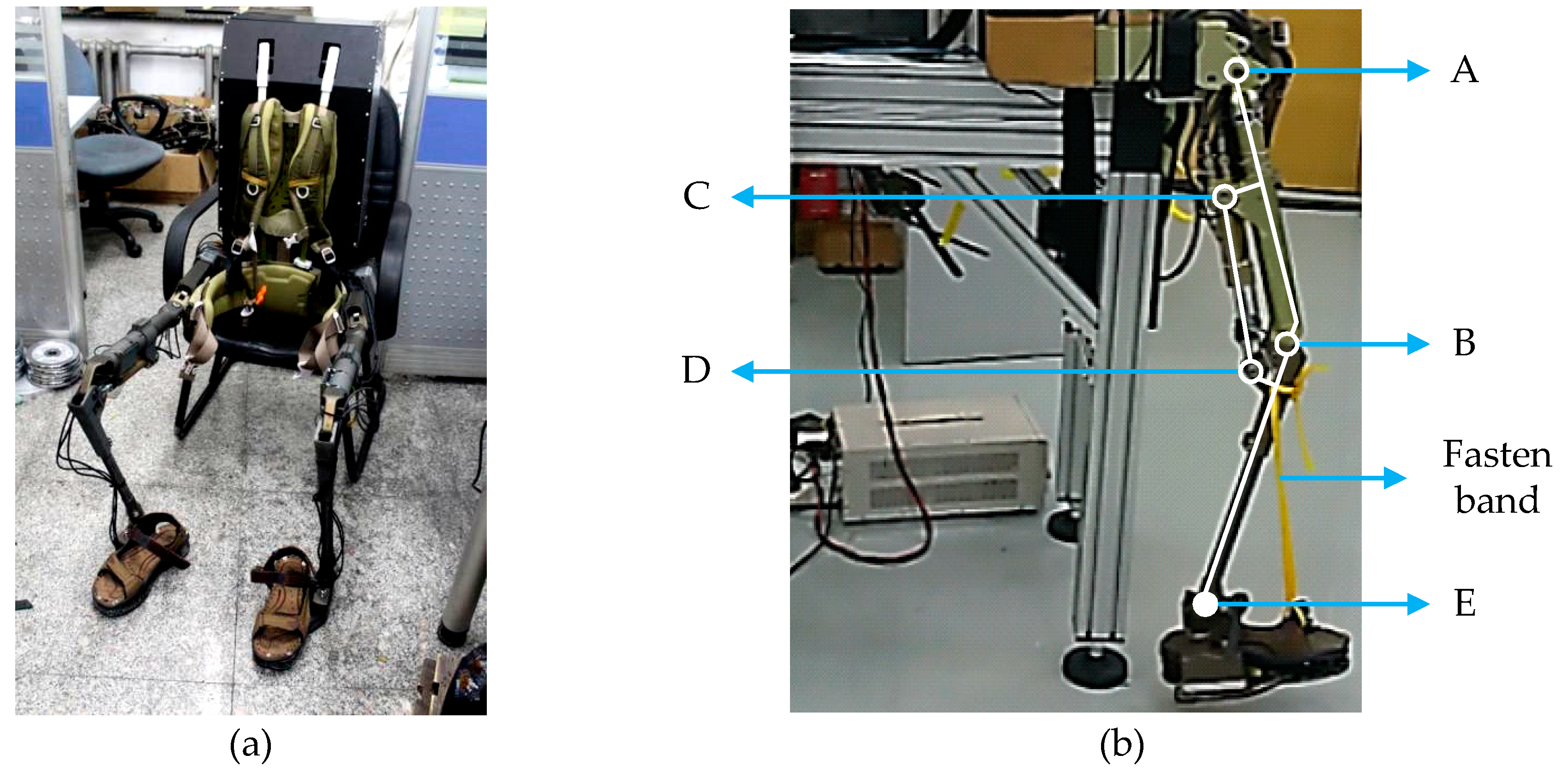
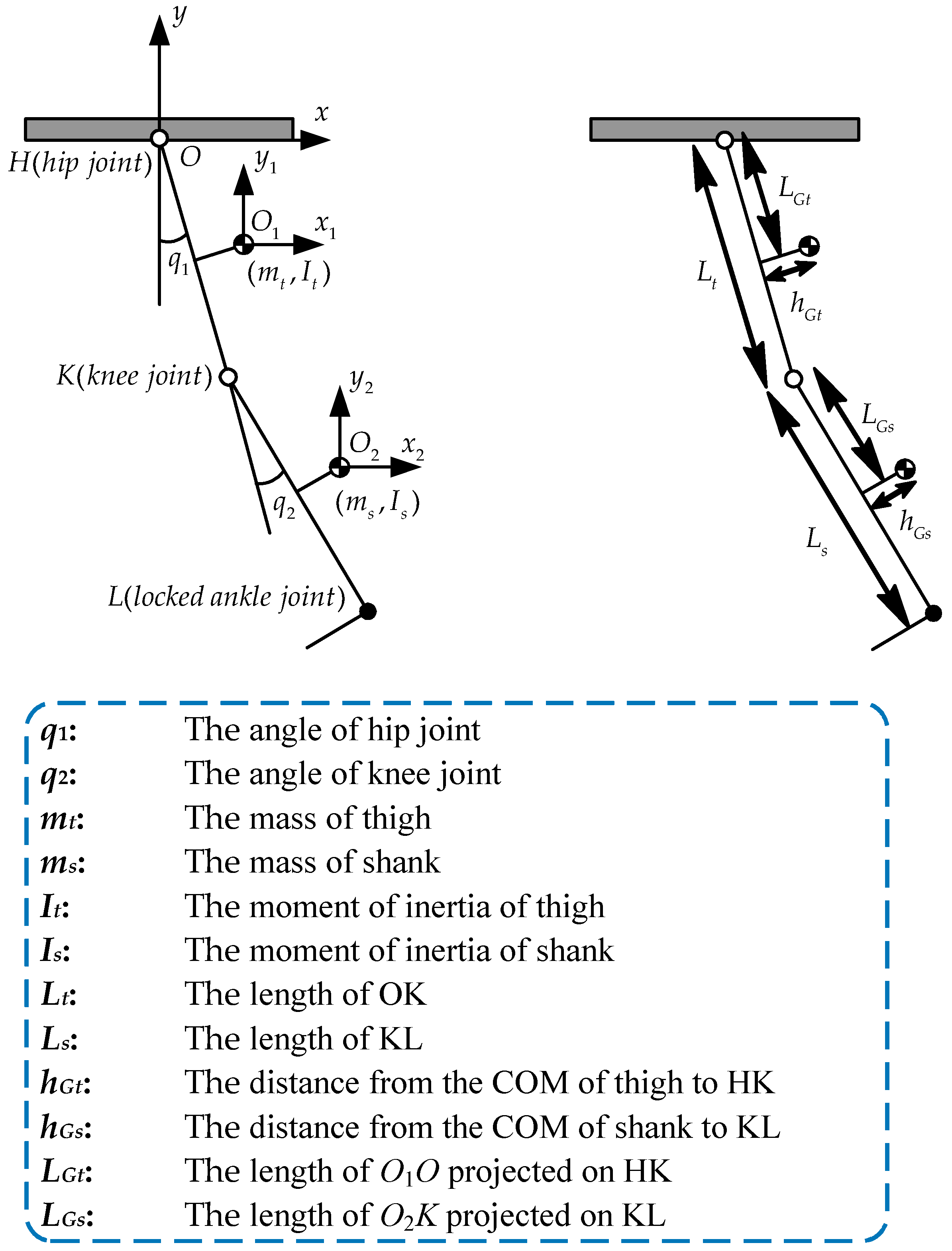
2.1. Parametric Dynamics Equation of Exoskeleton
2.2. Design of RLS-PSO Parameter Identification Algorithm
2.2.1. Establishment of the RLS
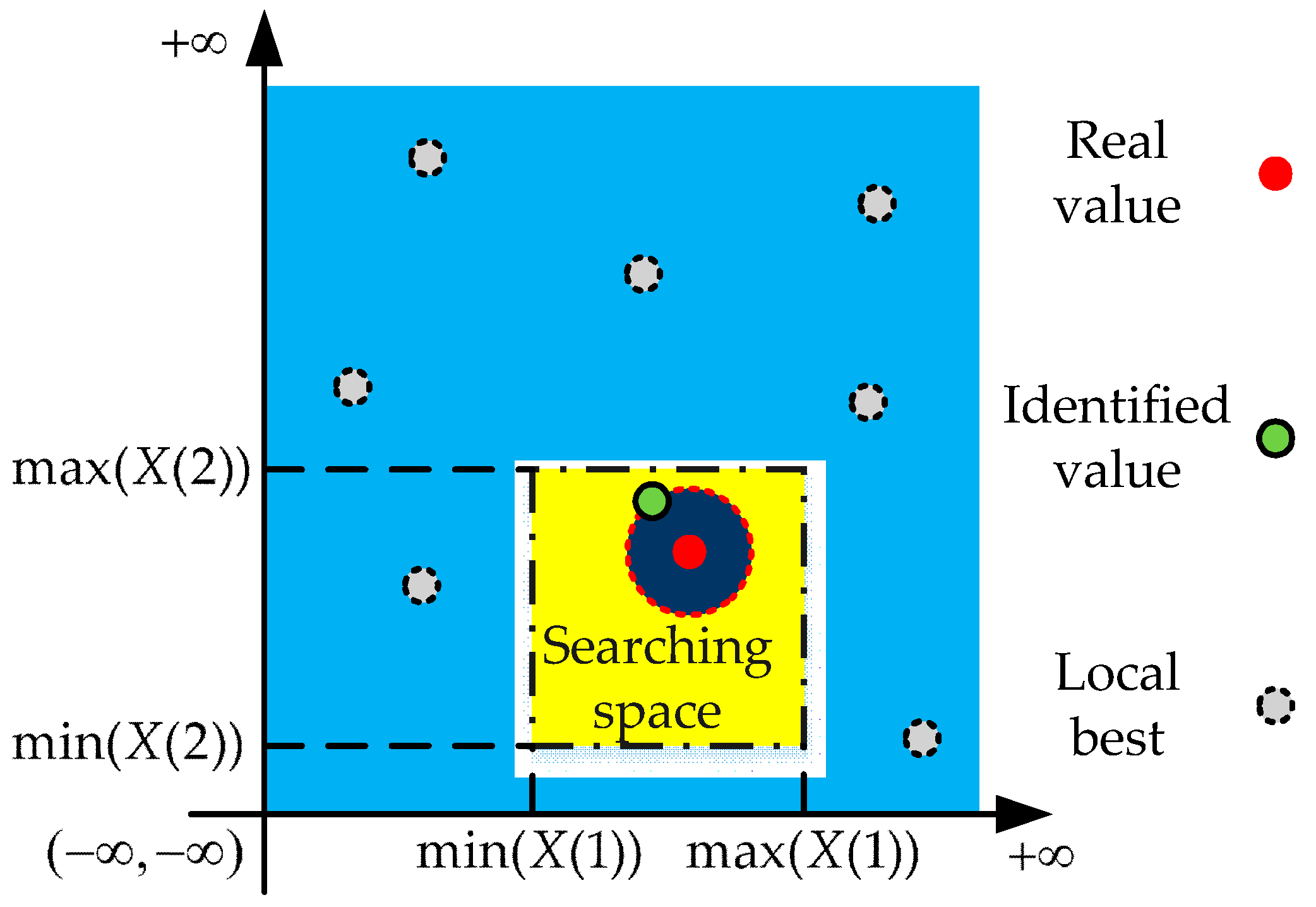
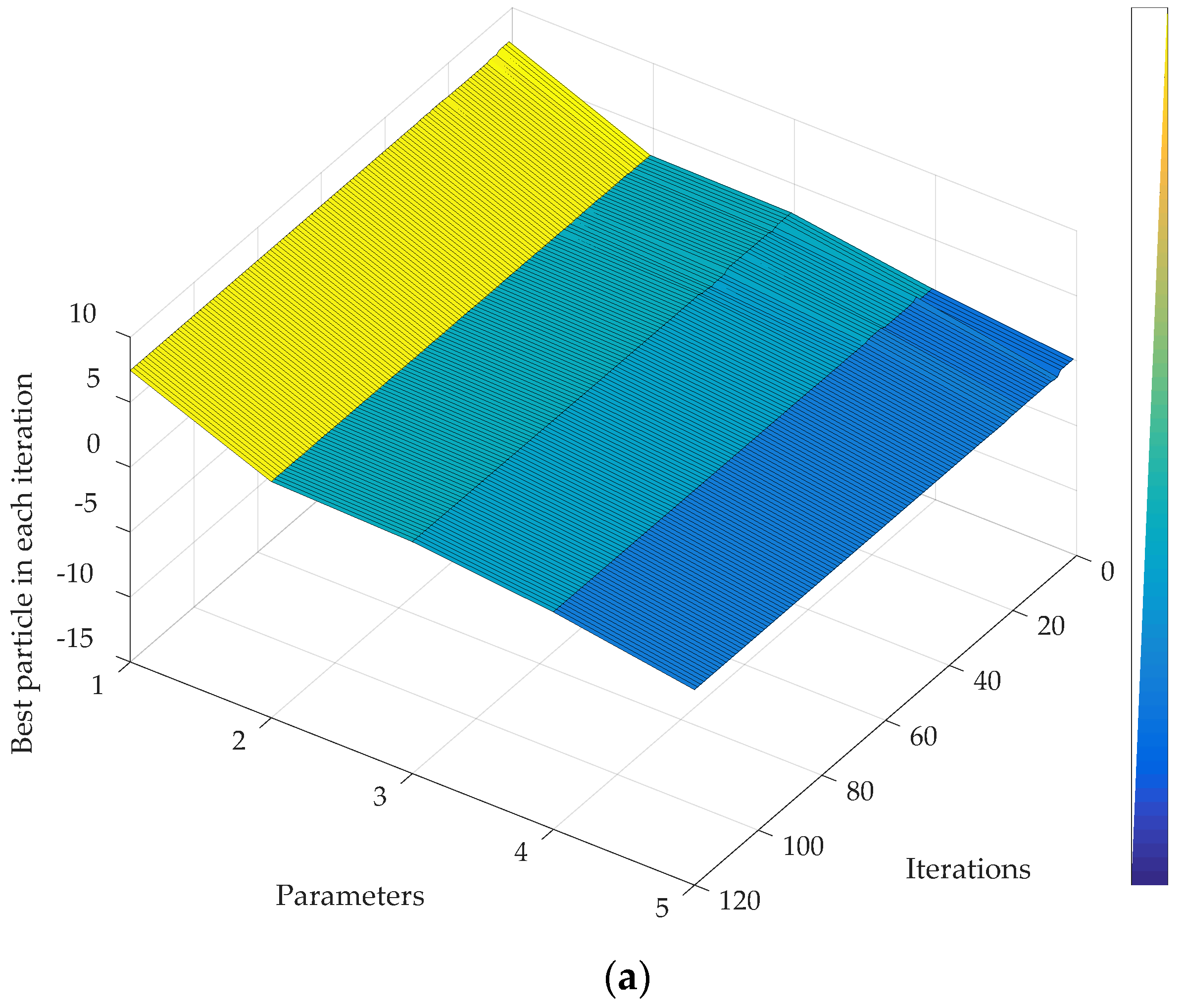
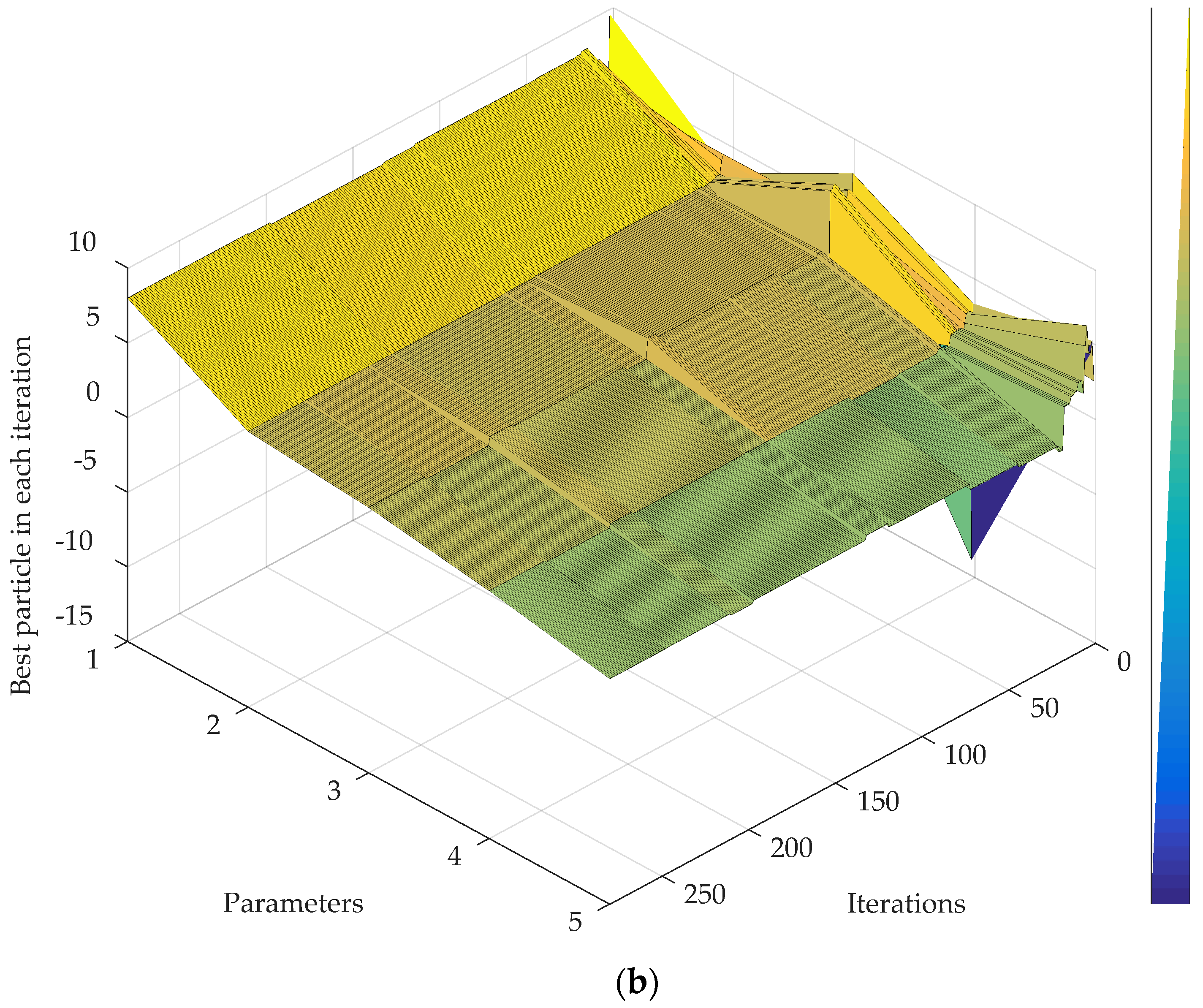
2.2.2. PSO with a Finite Search Space
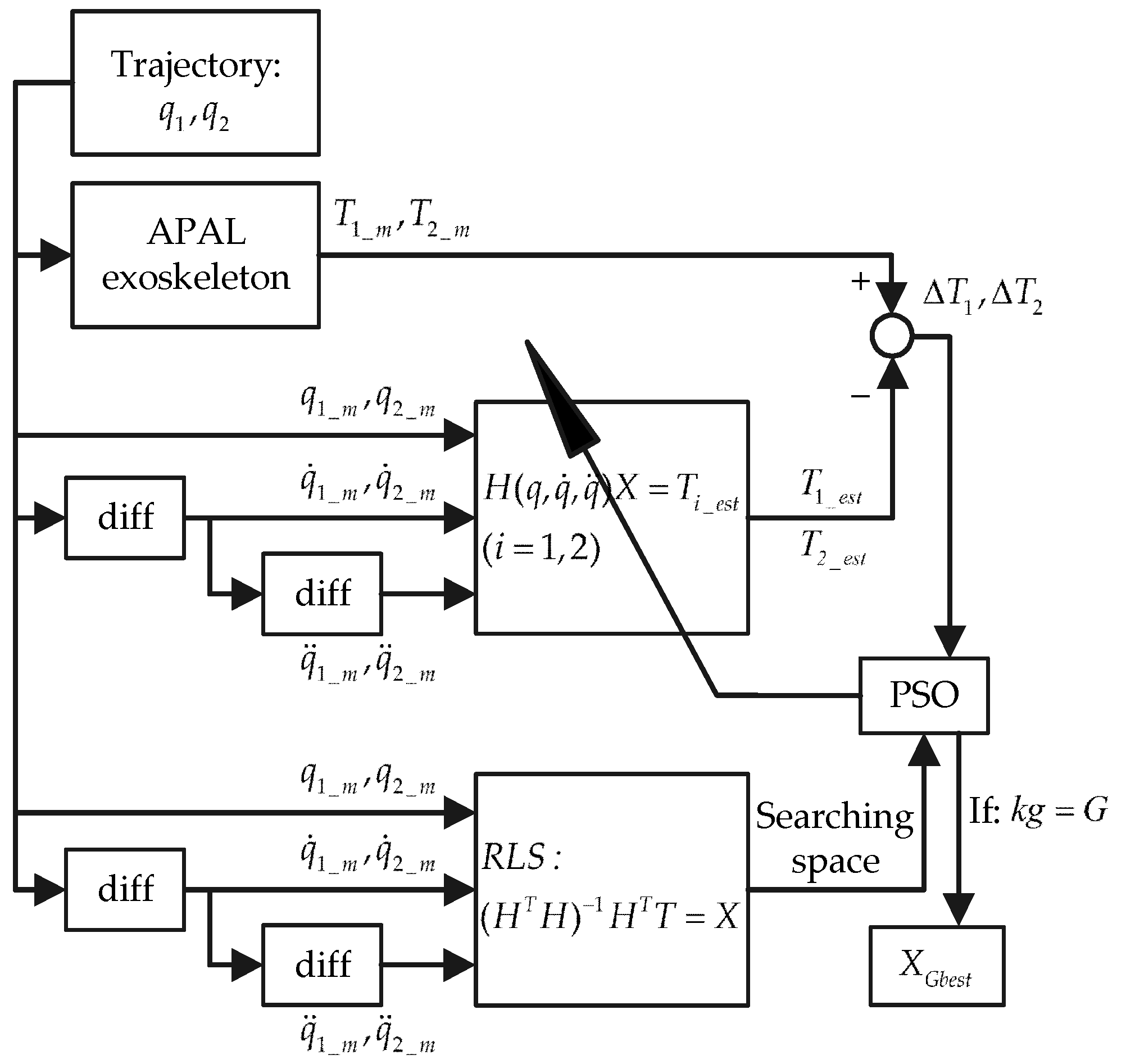
2.2.3. Flowchart of RLS-PSO
- RLS identifies the fluctuation range of each parameter in X by Equation (6), thereby defining the search space of PSO;
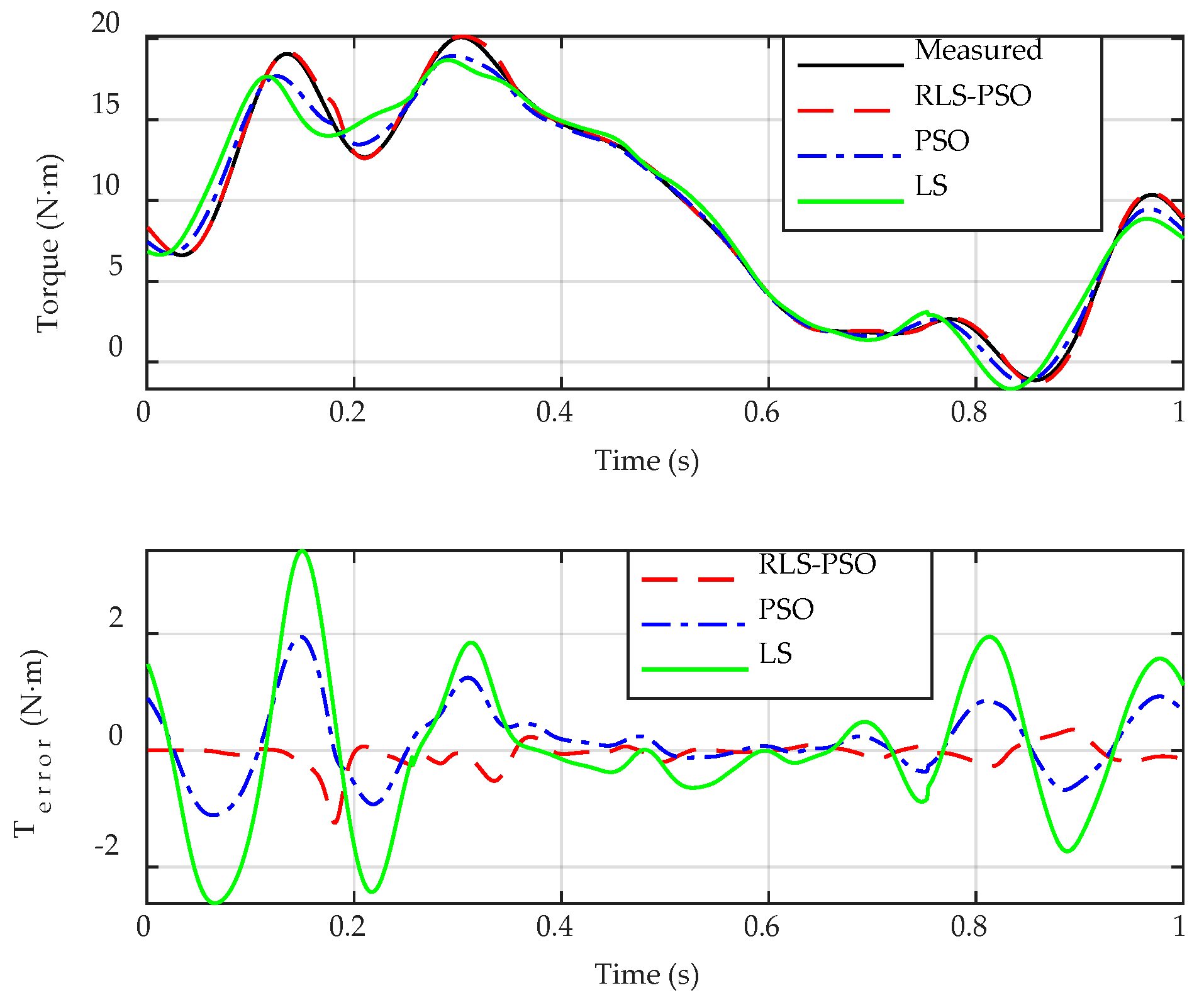
- Within the search space defined by the RLS, the PSO optimizes X by Equations (7) and (8). The estimated values of the hip and knee torques respectively represented by and are calculated by substituting X identified in each iteration into Equation (4). and are subtracted from and , respectively. The absolute values of the differences are and , respectively. In each iteration, the optimization goal of the PSO is: , ;
- When the iteration reaches G times or (, ), the PSO stops searching and the global minima is the identified parameter vector.
3. Data Acquisition and Discussion
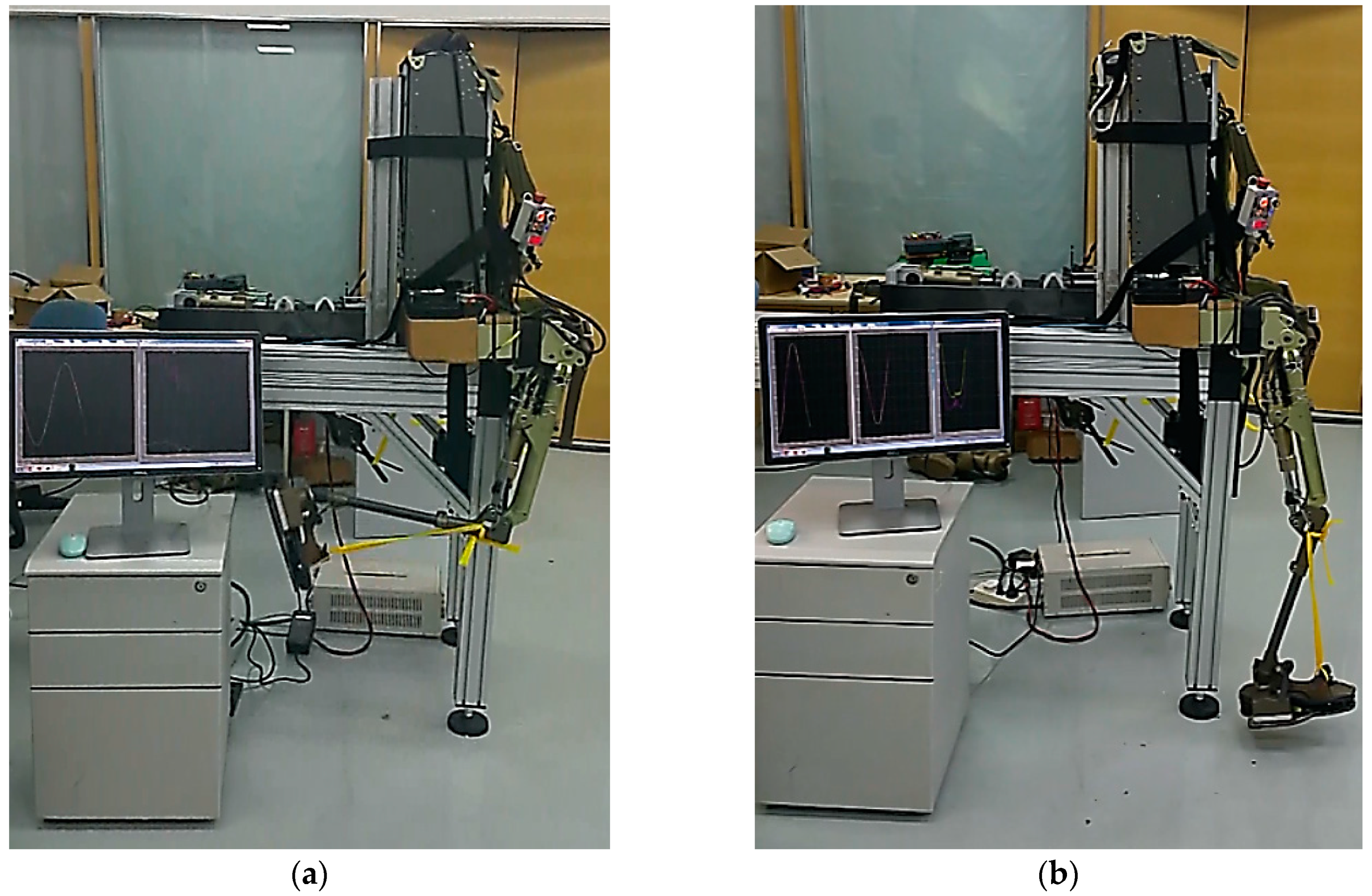
3.1. Data Acquisition
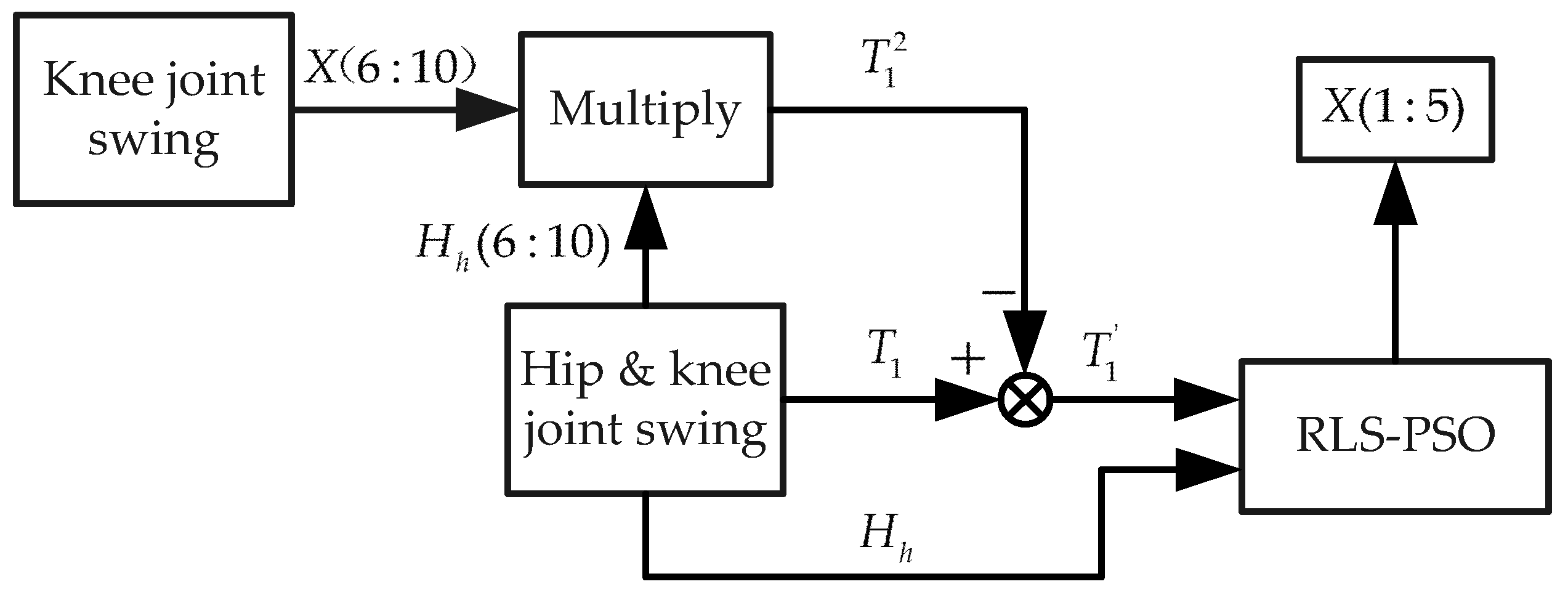
- The hip joint is fixed. The knee joint follows the target trajectory. and are acquired. Substitute and into Equation (6) to define the range of as the search space of the PSO. The identification of is completed by Equation (7) and (8);
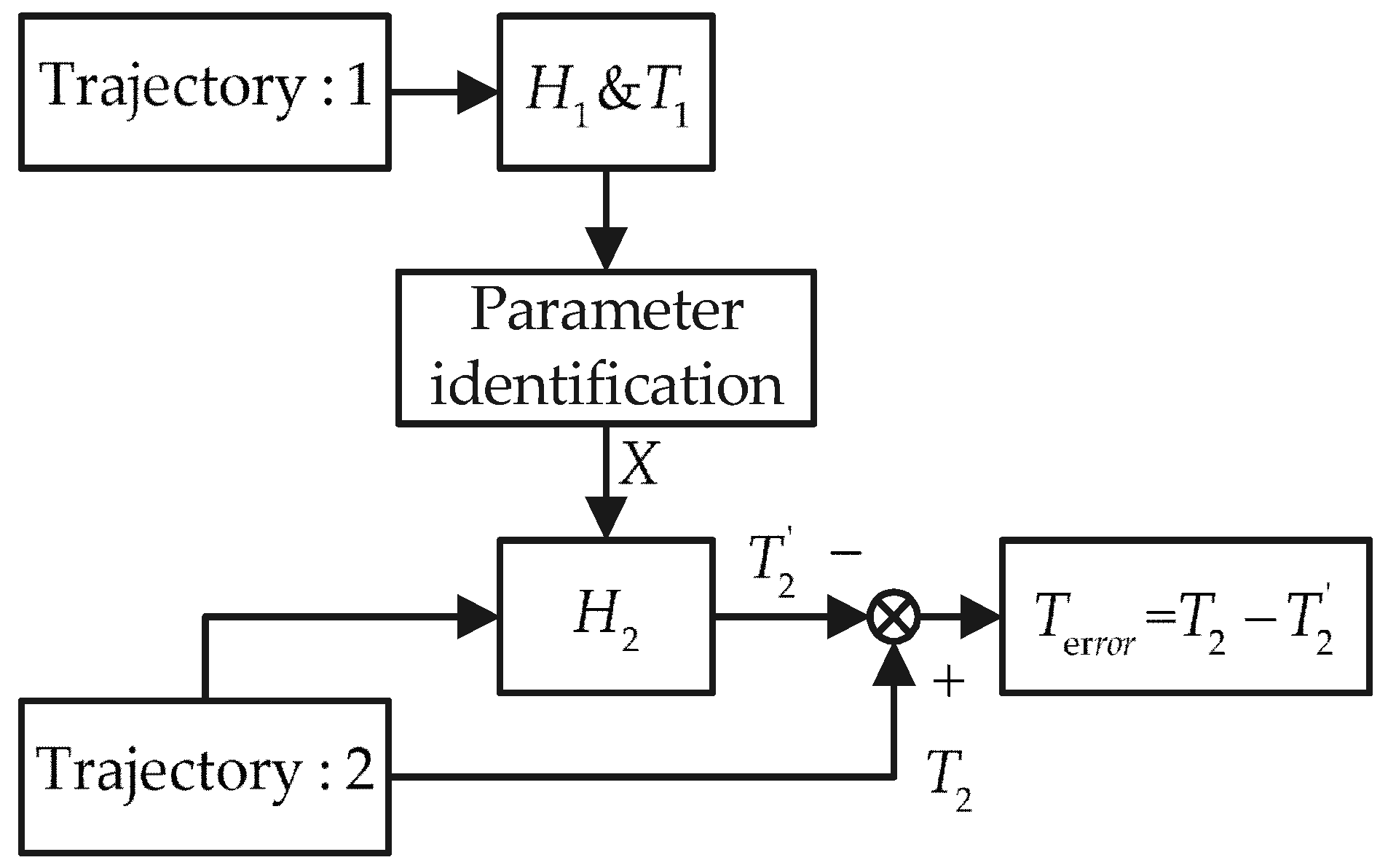
- Both the hip and knee joints follow the target trajectory. After that, is acquired. Substitute and into equation (9) to calculate . is the torque generated by the hip joint to resist the interference of the swing on the knee joint. is calculated by equation (4). is the difference between and ;
- Substituting and into Equation (6) defines the range of as the search space of the PSO. is identified by Equations (7) and (8).
3.2. The Identification of Parameters
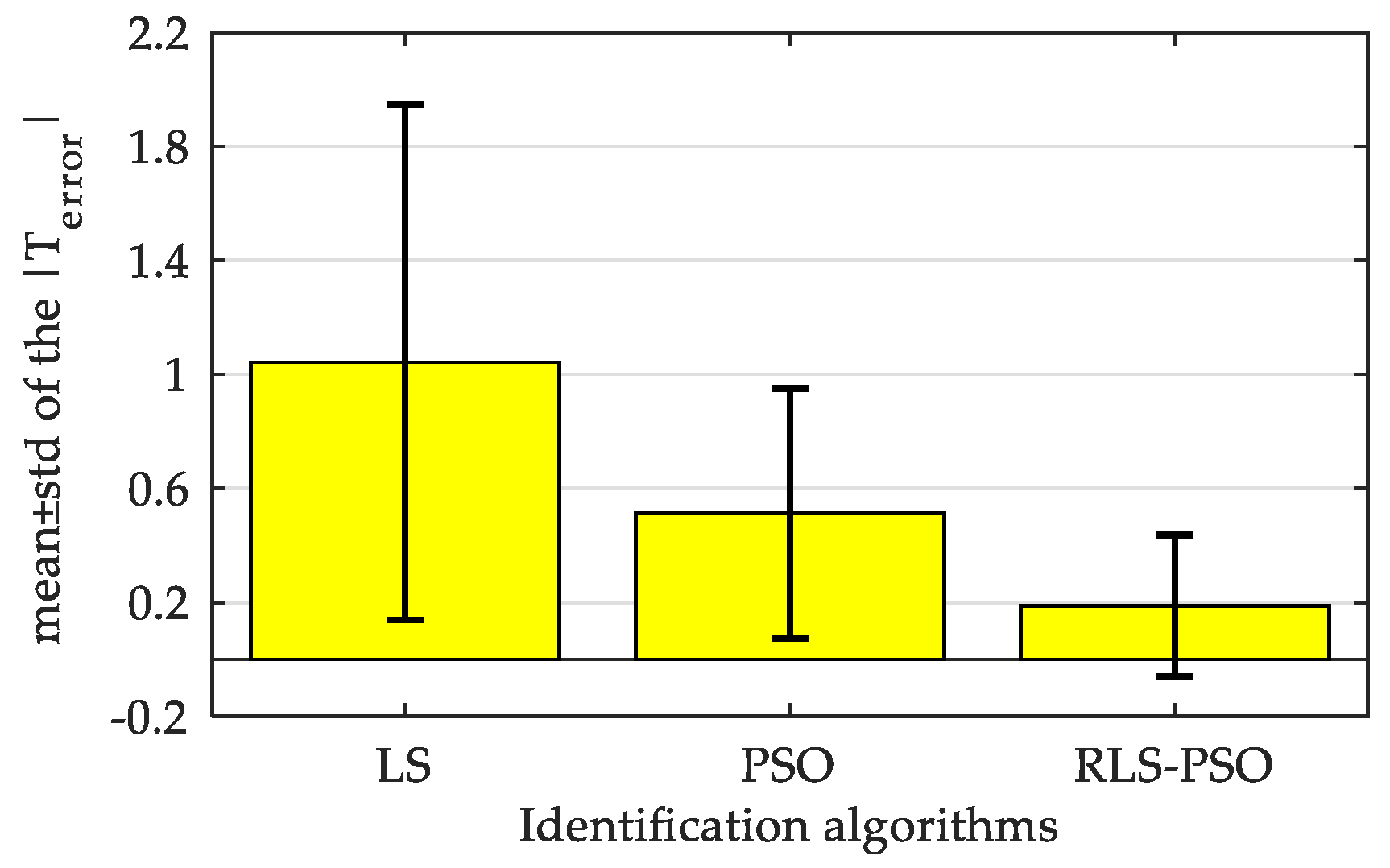
3.2.1. Quantitative Evaluation Method for Identification Accuracy
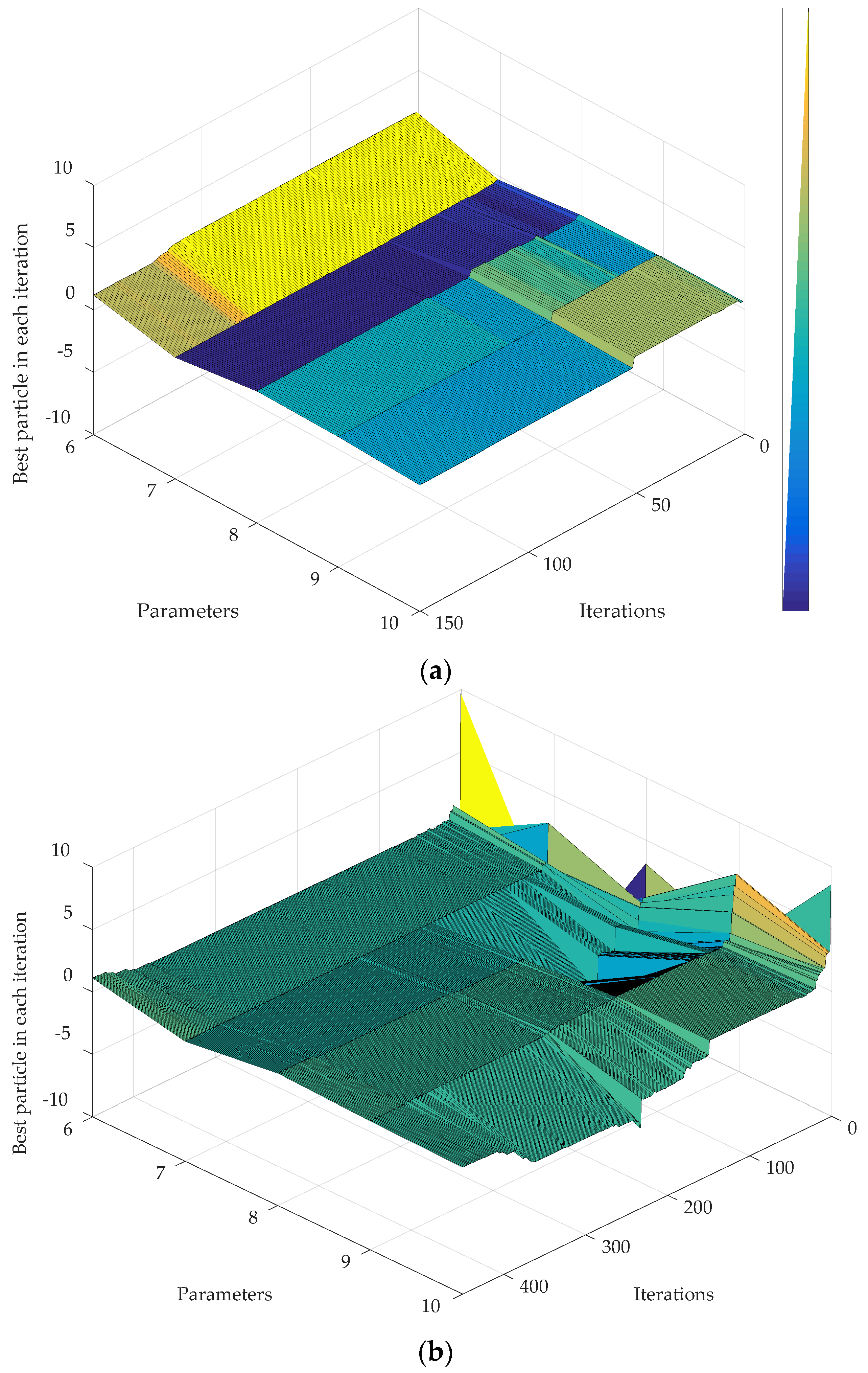
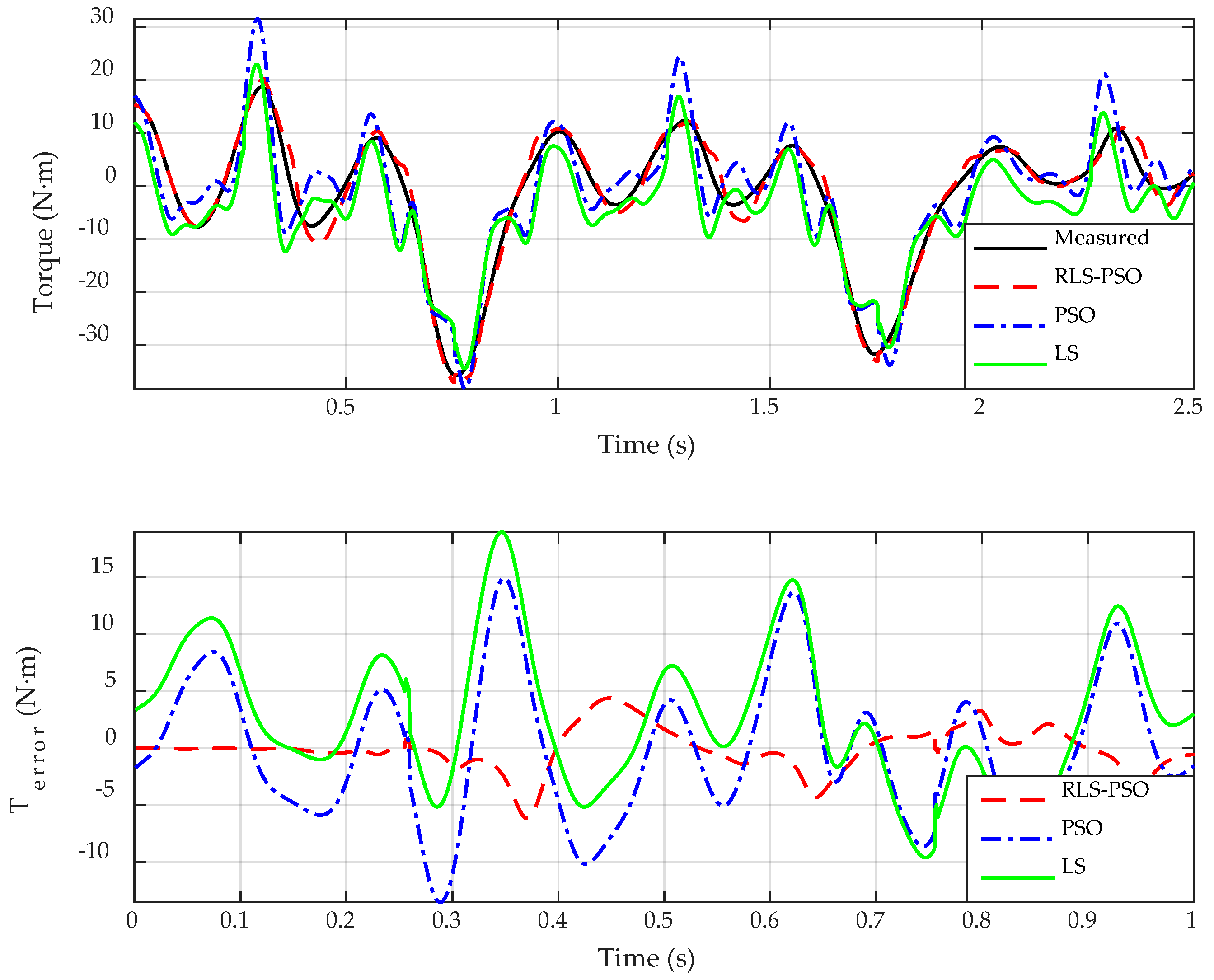
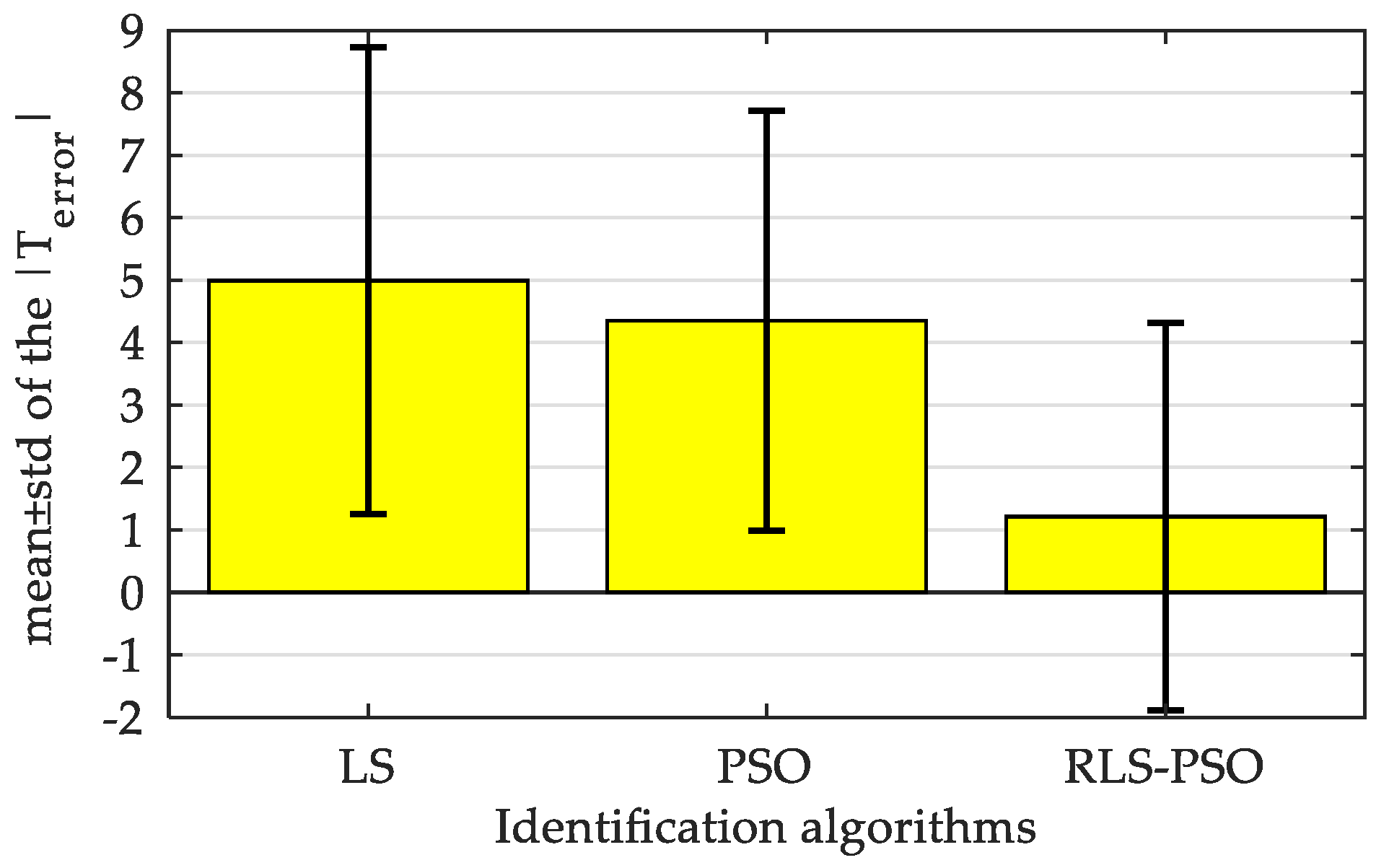
3.2.2. Quantitative Analysis of RLS-PSO Identification Accuracy
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hiroaki, K.; Yoshiyuki, S. Power assist method based on Phase Sequence and muscle force condition for HAL. Adv. Robot. 2005, 19, 717–734. [Google Scholar]
- Aguirre-Ollinger, G.; Nagarajan, U.; Goswami, A. An admittance shaping controller for exoskeleton assistance of the lower extremities. Auton. Robot. 2016, 40, 1–28. [Google Scholar] [CrossRef]
- Collins, S.H.; Wiggin, M.B.; Sawicki, G.S. Reducing the energy cost of human walking using an unpowered exoskeleton. Nature 2015, 522, 212–215. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, J.W.; Kim, H.; Jang, J.; Park, S. Virtual model control of exoskeleton for load carriage inspired by human behavior. Auton. Robot. 2015, 38, 211–223. [Google Scholar] [CrossRef]
- Gregorczyk, K.N.; Hasselquist, L.; Schiffman, J.M.; Bensel, C.K.; Obusek, J.P.; Gutekunst, D.J. Effects of a lower-body exoskeleton device on metabolic cost and gait biomechanics during load carriage. Ergonomics 2010, 53, 1263–1275. [Google Scholar] [CrossRef]
- Kazerooni, H. The Berkeley Exoskeleton Project. Experimental Robotics IX; Springe: Berlin/Heidelberg, Germany, 2006; pp. 9–15. [Google Scholar]
- Mir-Nasiri, N. Efficient Exoskeleton for Human Motion Assistance. Wearable Robotics: Challenges and Trends; Springer International Publishing: New York, NY, USA, 2017. [Google Scholar]
- Cao, H.; Zhu, J.; Xia, C.; Zhou, H.; Chen, X.; Wang, Y. Design and Control of a Hydraulic-Actuated Leg Exoskeleton for Load-Carrying Augmentation. Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2010; pp. 590–599. [Google Scholar]
- Zhang, X.; Guo, Q.; Zhao, C.; Zhang, Y.; Luo, X. Development of a lower extremity exoskeleton suit actuated by hydraulic. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 587–591. [Google Scholar]
- Kim, H.; Shin, Y.J.; Kim, J. Design and locomotion control of a hydraulic exoskeleton for mobility augmentation. Mechatronics 2017, 46, 32–45. [Google Scholar] [CrossRef]
- Bicchi, A.; Tonietti, G. Fast and soft-arm tactics. IEEE Robot. Autom. Mag. 2004, 11, 22–33. [Google Scholar] [CrossRef]
- Tucker, M.R.; Olivier, J.; Pagel, A.; Bleuler, H.; Bouri, M.; Lambercy, O.; del R Millán, J.; Riener, R.; Vallery, H.; Gassert, R. Control strategies for active lower extremity prosthetics and orthotics: A review. J. NeuroEng. Rehabil. 2015, 12, 1. [Google Scholar] [CrossRef] [PubMed]
- Durandau, G.; Sartori, M.; Bortole, M.; Moreno, J.C.; Pons, J.L.; Farina, D. Real-Time Modeling for Lower Limb Exoskeletons. In Wearable Robotics: Challenges and Trends; Biosystems & Biorobotics; González-Vargas, J., Ibáñez, J., Contreras-Vidal, J., van der Kooij, H., Pons, J., Eds.; Springer: Cham, Germany, 2017; Volume 16. [Google Scholar]
- Moren, J.C.; Brunetti, F.; Navarro, E.; Forner-Cordero, A.; Pons, J.L. Analysis of the human interaction with a wearable lower-limb exoskeleton. Appl. Bionics Biomech. 2009, 2, 245–256. [Google Scholar] [CrossRef]
- Manns, P.; Sreenivasa, M.; Millard, M.; Mombaur, K. Motion Optimization and Parameter Identification for a Human and Lower Back Exoskeleton Model. IEEE Robot. Autom. Lett. 2017, 2, 1564–1570. [Google Scholar] [CrossRef] [Green Version]
- Cong, L.; Wu, D.; Long, Y.; Du, Z.; Dong, W. Parameter Identification Based Sensitivity Amplification Control for Lower Extremity Exoskeleton. In Proceedings of the 2017 International Conference on Artificial Intelligence, Automation and Control Technologies, Wuhan, China, 7–9 April 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Bertolini, A. Wearable Robots: A Legal Analysis. Wearable Robotics: Challenges and Trends; Springer International Publishing: New York, NY, USA, 2017. [Google Scholar]
- Dollar, A.M.; Herr, H. Exoskeletons and Active Orthoses: Challenges and State-of-the-Art. IEEE Trans. Robot. 2008, 24, 144–158. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Cong, L.; Wang, W.; Zhang, Z.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskelton. ISA Trans. 2017, 67, 389. [Google Scholar] [CrossRef] [PubMed]
- Vantilt, J.; Aertbeliën, E.; De Groote, F.; De Schutter, J. Optimal excitation and identification of the dynamic model of robotic systems with compliant actuators. In Proceedings of the IEEE International Conference on Robotics & Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2117–2124. [Google Scholar]
- Ghan, J.; Kazerooni, H. System identification for the Berkeley exoskeleton (BLEEX). In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3477–3484. [Google Scholar]
- Steger, R.; Kim, S.H.; Kazerooni, H. Control scheme and networked control architecture for the Berkeley exoskeleton (BLEEX). In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 3469–3476. [Google Scholar]
- Gautier, M.; Briot, S. Dynamic Parameter Identification of a 6 DOF Industrial Robot using Power Model. In Proceedings of the IEEE International Conference on Robotics & Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Ogawa, Y.; Venture, G.; Ott, C. Dynamic parameters identification of a humanoid robot using joint torque sensors and/or contact forces. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014. [Google Scholar]
- Mrachacz-Kersting, N.; Lavoie, B.A.; Andersen, J.B.; Sinkjær, T. Characterisation of the quadriceps stretch reflex during the transition from swing to stance phase of human walking. Exp. Brain Res. 2004, 159, 108–122. [Google Scholar] [CrossRef] [PubMed]
- Pantall, A.; Gregor, R.J.; Prilutsky, B.I. Stance and swing phase detection during level and slope walking in the cat: Effects of slope, injury, subject and kinematic detection method. J. Biomech. 2012, 45, 1529–1533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Doranga, S.; Wu, C.Q. Parameter Identification for Nonlinear Dynamic Systems via Multilinear Least Square Estimation. In Special Topics in Structural Dynamics; Springer: Cham, Germany, 2014; Volume 6. [Google Scholar]
- Teunissen, P.; Montenbruck, O. Teunissen. Least-Squares Estimation and Kalman Filtering. Springer Handbook of Global Navigation Satellite Systems; Springer International Publishing: New York, NY, USA, 2017. [Google Scholar]
- Ding, L.; Shan, W.; Zhou, C.; Xi, W. Dynamic Identification for Industrial Robot Manipulators Based on Glowworm Optimization Algorithm. In Proceedings of the International Conference on Intelligent Robotics and Applications, Wuhan, China, 16–18 August 2017; pp. 789–799. [Google Scholar]
- Xiu, W.; Zhang, L.; Ma, O. Experimental study of a momentum-based method for identifying the inertia barycentric parameters of a human body. Multibody Syst. Dyn. 2016, 36, 237–255. [Google Scholar] [CrossRef]
- Ayusawa, K.; Venture, G.; Nakamura, Y. Identifiability and identification of inertial parameters using the underactuated base-link dynamics for legged multibody systems. Int. J. Robot. Res. 2014, 33, 446–468. [Google Scholar] [CrossRef]
- Bingül, Z.; Karahan, O. Dynamic identification of Staubli RX-60 robot using PSO and LS methods. Expert Syst. Appl. 2011, 38, 4136–4149. [Google Scholar] [CrossRef]
- Nickabadi, A.; Ebadzadeh, M.M.; Safabakhsh, R. A Novel Particle Swarm Optimization Algorithm with Adaptive Inertia Weight; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Zheng, Y.L.; Ma, L.H.; Zhang, L.Y.; Qian, J.X. On the convergence analysis and parameter selection in particle swarm optimization. In Proceedings of the International Conference on Machine Learning & Cybernetics, Xi’an, China, 5 November 2004. [Google Scholar]
- Khalil, W.; Dombre, E. Modeling, Identification and Control of Robots; Taylor & Francis, Inc.: Abingdon, UK, 2003. [Google Scholar]
- Deng, J.; Wang, P.; Li, M.; Guo, W.; Zha, F.; Wang, X. Structure design of active power-assist exoskeleton APAL robot. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Li, M.; Deng, J.; Zha, F.; Qiu, S.; Wang, X.; Chen, F. Towards Online Estimation of Human Joint Muscular Torque with a Exoskeleton Robot. Appl. Sci. 2018, 8, 1610. [Google Scholar] [CrossRef]
- Ding, F.; Wang, Y.; Ding, J. Recursive Least Squares Parameter Identification Algorithms for Systems with Colored Noise Using the Filtering Technique and the Auxilary Model; Academic Press, Inc.: Cambridge, MA, USA, 2015. [Google Scholar]
- Dolanc, G.; Strmčnik, S. Identification of nonlinear systems using a piecewise-linear Hammerstein model. Syst. Control Lett. 2013, 54, 145–158. [Google Scholar] [CrossRef]
- Young, P.C. Recursive Least Squares Estimation. Recursive Estimation and Time-Series Analysis; Springer: Berlin/Heidelberg, Germany, 2011; pp. 29–46. [Google Scholar]
- Couceiro, M.; Ghamisi, P. Particle Swarm Optimization. Fractional Order Darwinian Particle Swarm Optimization; Springer International Publishing: New York, NY, USA, 2016; pp. 149–150. [Google Scholar]
- Khandelwal, S.; Wickström, N. Evaluation of the performance of accelerometer-based gait event detection algorithms in different real-world scenarios using the MAREA gait database. Gait Posture 2017, 51, 84–90. [Google Scholar] [CrossRef] [PubMed]
- Wagenaar, R.C.; van Emmerik, R.E. Resonant frequencies of arms and legs identify different walking patterns. J. Biomech. 2000, 33, 853–861. [Google Scholar] [CrossRef]
- Farley, C.T.; González, O. Leg stiffness and stride frequency in human running. J. Biomech. 1996, 29, 181–186. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Hip Trajectory | Knee Trajectory |
|---|---|---|
| 1 | −10 | 45 − 30sin(2πt) |
| 2 | −10 | 60 − 30sin(2πt) |
| 3 | −30 − 30sin(2πt) | 75 − 30sin(2πt) |
| 4 | −45 − 30sin(2πt) | 60 + 30sin(2πt) |
| Performance Index | Hip Angle | Knee Angle |
|---|---|---|
| Tracking accuracy (°) | 0.0217 | 0.0358 |
| Response time (s) | 0.6806 | 0.9725 |
| 0.79~1.79 | −0.98~0.18 | 0.39~0.91 | 0.01~1.13 | 0.02~3.15 |
| Type | |||||
|---|---|---|---|---|---|
| LS | 1.3859 | −0.8267 | 0.7019 | 0.0943 | 0.2907 |
| PSO | 1.2199 | −0.4016 | 0.5906 | 0.3323 | 0.1830 |
| RLS-PSO | 1.1822 | −0.2808 | 0.5655 | 0.4406 | 0.1020 |
| 5.38~11.64 | 2.34~5.20 | 2.01~4.25 | 0.10~7.88 | 0.01~1.70 |
| LS | 6.5124 | 2.4481 | 2.4996 | 1.7285 | 0.0245 |
| PSO | 7.9970 | 3.4969 | 2.9922 | 1.5914 | 0.0752 |
| RLS-PSO | 7.4433 | 3.1788 | 2.8413 | 1.7285 | 0.0372 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zha, F.; Sheng, W.; Guo, W.; Qiu, S.; Deng, J.; Wang, X. Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO. Appl. Sci. 2019, 9, 324. https://doi.org/10.3390/app9020324
Zha F, Sheng W, Guo W, Qiu S, Deng J, Wang X. Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO. Applied Sciences. 2019; 9(2):324. https://doi.org/10.3390/app9020324
Chicago/Turabian StyleZha, Fusheng, Wentao Sheng, Wei Guo, Shiyin Qiu, Jing Deng, and Xin Wang. 2019. "Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO" Applied Sciences 9, no. 2: 324. https://doi.org/10.3390/app9020324
APA StyleZha, F., Sheng, W., Guo, W., Qiu, S., Deng, J., & Wang, X. (2019). Dynamic Parameter Identification of a Lower Extremity Exoskeleton Using RLS-PSO. Applied Sciences, 9(2), 324. https://doi.org/10.3390/app9020324