Multi-Switching Combination Synchronization of Three Fractional-Order Delayed Systems


Abstract
:1. Introduction
2. Preliminaries
3. Multi-Switching Combination Synchronization Scheme
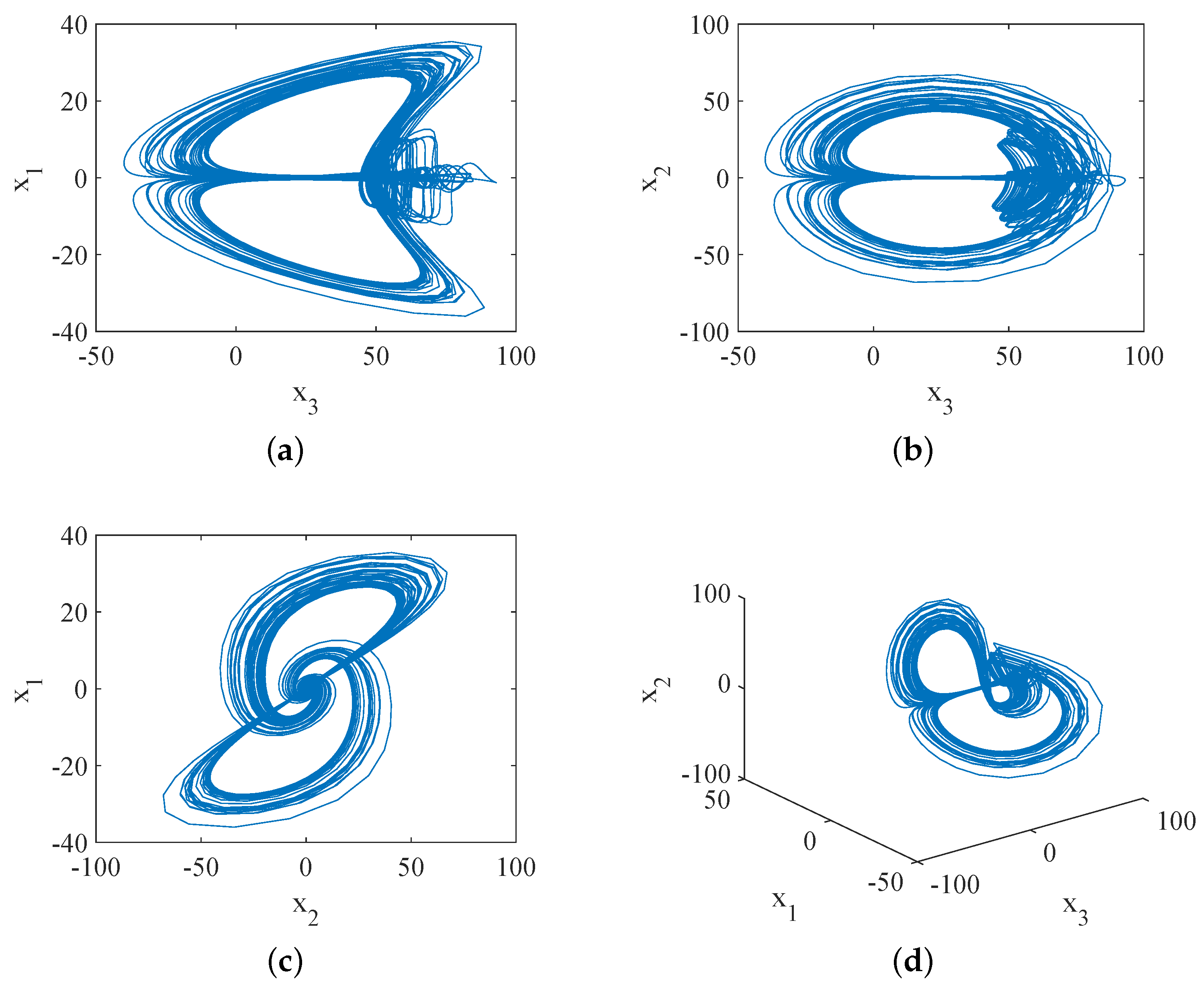
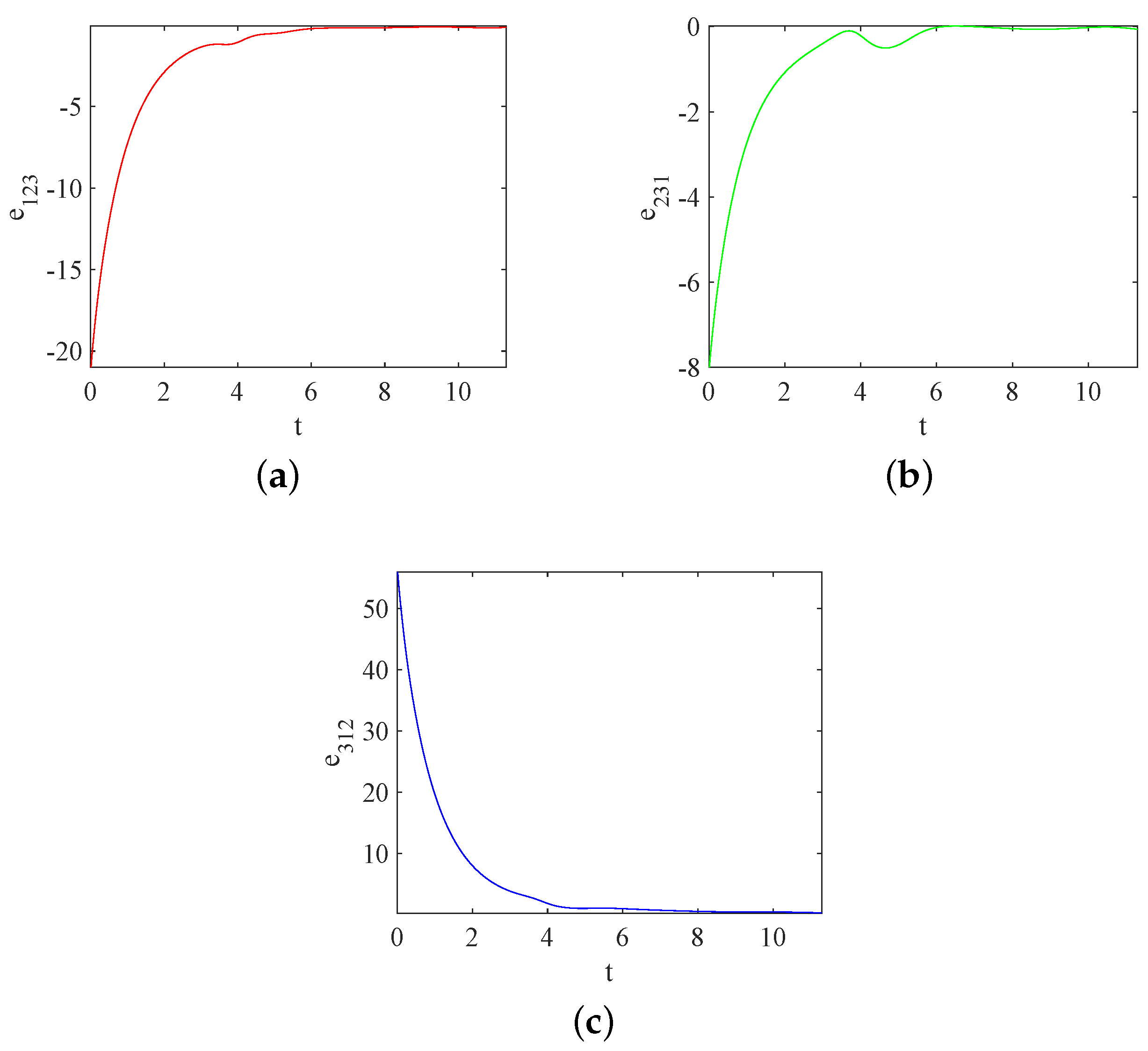
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mandelbrot, B.B. The Fractal Geometry of Nature; WH Freeman: New York, NY, USA, 1983; Volume 173. [Google Scholar]
- Boukal, Y.; Darouach, M.; Zasadzinski, M.; Radhy, N.E. Large-scale fractional-order systems: Stability analysis and their decentralised functional observers design. IET Control. Theory Appl. 2017, 12, 359–367. [Google Scholar] [CrossRef]
- Caponetto, R. Fractional Order Systems: Modeling and Control Applications; World Scientific: Singapore, 2010; Volume 72. [Google Scholar]
- Azar, A.T.; Vaidyanathan, S.; Ouannas, A. Fractional Order Control and Synchronization of Chaotic Systems; Springer: Berlin/Heidelberg, Germany, 2017; Volume 688. [Google Scholar]
- Fahim, S.M.; Ahmed, S.; Imtiaz, S.A. Fractional order model identification using the sinusoidal input. ISA Trans. 2018, 83, 35–41. [Google Scholar] [CrossRef]
- Lin, C.; Chen, B.; Wang, Q.G. Static output feedback stabilization for fractional-order systems in TS fuzzy models. Neurocomputing 2016, 218, 354–358. [Google Scholar] [CrossRef]
- Bendoukha, S.; Ouannas, A.; Wang, X.; Khennaoui, A.A.; Pham, V.T.; Grassi, G.; Huynh, V. The Co-existence of Different Synchronization Types in Fractional-order Discrete-time Chaotic Systems with Non–identical Dimensions and Orders. Entropy 2018, 20, 710. [Google Scholar] [CrossRef]
- Liu, Z.; Xia, T.; Wang, J. Fractional two-dimensional discrete chaotic map and its applications to the information security with elliptic-curve public key cryptography. J. Vib. Control 2018, 24, 4797–4824. [Google Scholar] [CrossRef]
- Richard, J.P. Time-delay systems: An overview of some recent advances and open problems. Automatica 2003, 39, 1667–1694. [Google Scholar] [CrossRef]
- Mircea, G.; Neamtu, M.; Opriş, D. Uncertain, Stochastic and Fractional Dynamical Systems with Delay: Applications; Lambert Academic Publishing: Saarbrücken, Germany, 2011. [Google Scholar]
- Bhalekar, S.; Daftardar-Gejji, V. Fractional ordered Liu system with time-delay. Commun. Nonlinear Sci. Numer. Simul. 2010, 15, 2178–2191. [Google Scholar] [CrossRef]
- Wang, Z.; Huang, X.; Shi, G. Analysis of nonlinear dynamics and chaos in a fractional order financial system with time delay. Comput. Math. Appl. 2011, 62, 1531–1539. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Yu, Y.; Wen, G. Hybrid projective synchronization of time-delayed fractional order chaotic systems. Nonlinear Anal. Hybrid Syst. 2014, 11, 129–138. [Google Scholar] [CrossRef]
- Daftardar-Gejji, V.; Bhalekar, S.; Gade, P. Dynamics of fractional-ordered Chen system with delay. Pramana 2012, 79, 61–69. [Google Scholar] [CrossRef]
- Song, X.; Song, S.; Li, B. Adaptive synchronization of two time-delayed fractional-order chaotic systems with different structure and different order. Optik 2016, 127, 11860–11870. [Google Scholar] [CrossRef]
- Moaddy, K. Control and stability on chaotic convection in porous media with time delayed fractional orders. Adv. Differ. Equ. 2017, 2017, 311. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.B.; Zhao, L.D.; Xie, Z.G. Studying the intermittent stable theorem and the synchronization of a delayed fractional nonlinear system. Chin. Phys. B 2013, 22, 080506. [Google Scholar] [CrossRef]
- Djennoune, S.; Bettayeb, M.; Al-Saggaf, U.M. Synchronization of fractional–order discrete–time chaotic systems by an exact delayed state reconstructor: Application to secure communication. Int. J. Appl. Math. Comput. Sci. 2019, 29, 179–194. [Google Scholar] [CrossRef]
- Ding, D.; Qian, X.; Wang, N.; Liang, D. Synchronization and anti-synchronization of a fractional order delayed memristor-based chaotic system using active control. Mod. Phys. Lett. B 2018, 32, 1850142. [Google Scholar] [CrossRef]
- Velmurugan, G.; Rakkiyappan, R. Hybrid projective synchronization of fractional-order chaotic complex nonlinear systems with time delays. J. Comput. Nonlinear Dyn. 2016, 11, 031016. [Google Scholar] [CrossRef]
- He, S.; Sun, K.; Wang, H. Synchronisation of fractional-order time delayed chaotic systems with ring connection. Eur. Phys. J. Spec. Top. 2016, 225, 97–106. [Google Scholar] [CrossRef]
- Luo, R.; Wang, Y.; Deng, S. Combination synchronization of three classic chaotic systems using active backstepping design. Chaos Interdiscip. J. Nonlinear Sci. 2011, 21, 043114. [Google Scholar] [CrossRef]
- Sun, J.; Cui, G.; Wang, Y.; Shen, Y. Combination complex synchronization of three chaotic complex systems. Nonlinear Dyn. 2015, 79, 953–965. [Google Scholar] [CrossRef]
- Xi, H.; Li, Y.; Huang, X. Adaptive function projective combination synchronization of three different fractional-order chaotic systems. Optik 2015, 126, 5346–5349. [Google Scholar] [CrossRef]
- Zhou, X.; Jiang, M.; Huang, Y. Combination synchronization of three identical or different nonlinear complex hyperchaotic systems. Entropy 2013, 15, 3746–3761. [Google Scholar] [CrossRef]
- Jiang, C.; Liu, S.; Wang, D. Generalized combination complex synchronization for fractional-order chaotic complex systems. Entropy 2015, 17, 5199–5217. [Google Scholar] [CrossRef]
- Vincent, U.E.; Saseyi, A.; McClintock, P.V. Multi-switching combination synchronization of chaotic systems. Nonlinear Dyn. 2015, 80, 845–854. [Google Scholar] [CrossRef] [Green Version]
- Zheng, S. Multi-switching combination synchronization of three different chaotic systems via nonlinear control. Optik 2016, 127, 10247–10258. [Google Scholar] [CrossRef]
- Khan, A.; Khattar, D.; Prajapati, N. Adaptive multi switching combination synchronization of chaotic systems with unknown parameters. Int. J. Dyn. Control 2018, 6, 621–629. [Google Scholar] [CrossRef]
- Ahmad, I.; Shafiq, M.; Al-Sawalha, M.M. Globally exponential multi switching-combination synchronization control of chaotic systems for secure communications. Chin. J. Phys. 2018, 56, 974–987. [Google Scholar] [CrossRef]
- Hammami, S. Multi-switching combination synchronization of discrete-time hyperchaotic systems for encrypted audio communication. IMA J. Math. Control. Inf. 2018, 36, 583–602. [Google Scholar] [CrossRef]
- Bhat, M.A.; Khan, A. Multi-switching combination synchronization of different fractional-order non-linear dynamical systems. Int. J. Model. Simul. 2018, 38, 254–261. [Google Scholar] [CrossRef]
- Khan, A.; Bhat, M.A. Multi-switching combination–combination synchronization of non-identical fractional-order chaotic systems. Math. Methods Appl. Sci. 2017, 40, 5654–5667. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998; Volume 198. [Google Scholar]
- Kvitsinskii, A. Fractional integrals and derivatives: Theory and applications. Teor. Mater. Fiz. 1993, 3, 397–414. [Google Scholar]
- Deng, W.; Li, C.; Lü, J. Stability analysis of linear fractional differential system with multiple time delays. Nonlinear Dyn. 2007, 48, 409–416. [Google Scholar] [CrossRef]
- Tang, J. Synchronization of different fractional order time-delay chaotic systems using active control. Math. Probl. Eng. 2014, 2014, 262151. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Wang, Y.; Zhou, X. Multi-Switching Combination Synchronization of Three Fractional-Order Delayed Systems. Appl. Sci. 2019, 9, 4348. https://doi.org/10.3390/app9204348
Li B, Wang Y, Zhou X. Multi-Switching Combination Synchronization of Three Fractional-Order Delayed Systems. Applied Sciences. 2019; 9(20):4348. https://doi.org/10.3390/app9204348
Chicago/Turabian StyleLi, Bo, Yun Wang, and Xiaobing Zhou. 2019. "Multi-Switching Combination Synchronization of Three Fractional-Order Delayed Systems" Applied Sciences 9, no. 20: 4348. https://doi.org/10.3390/app9204348
APA StyleLi, B., Wang, Y., & Zhou, X. (2019). Multi-Switching Combination Synchronization of Three Fractional-Order Delayed Systems. Applied Sciences, 9(20), 4348. https://doi.org/10.3390/app9204348