1. Introduction
The development and manufacture of high-accuracy, large-scale, or long-travelling platforms have gradually become the mainstream trend of the machine tool industry. For the case of machine tools with long-travelling linear guideways, the geometric errors originated from assembly processes can obviously result in damaged transmission components and worn casting parts, and consequently, reduce the accuracy and service life.
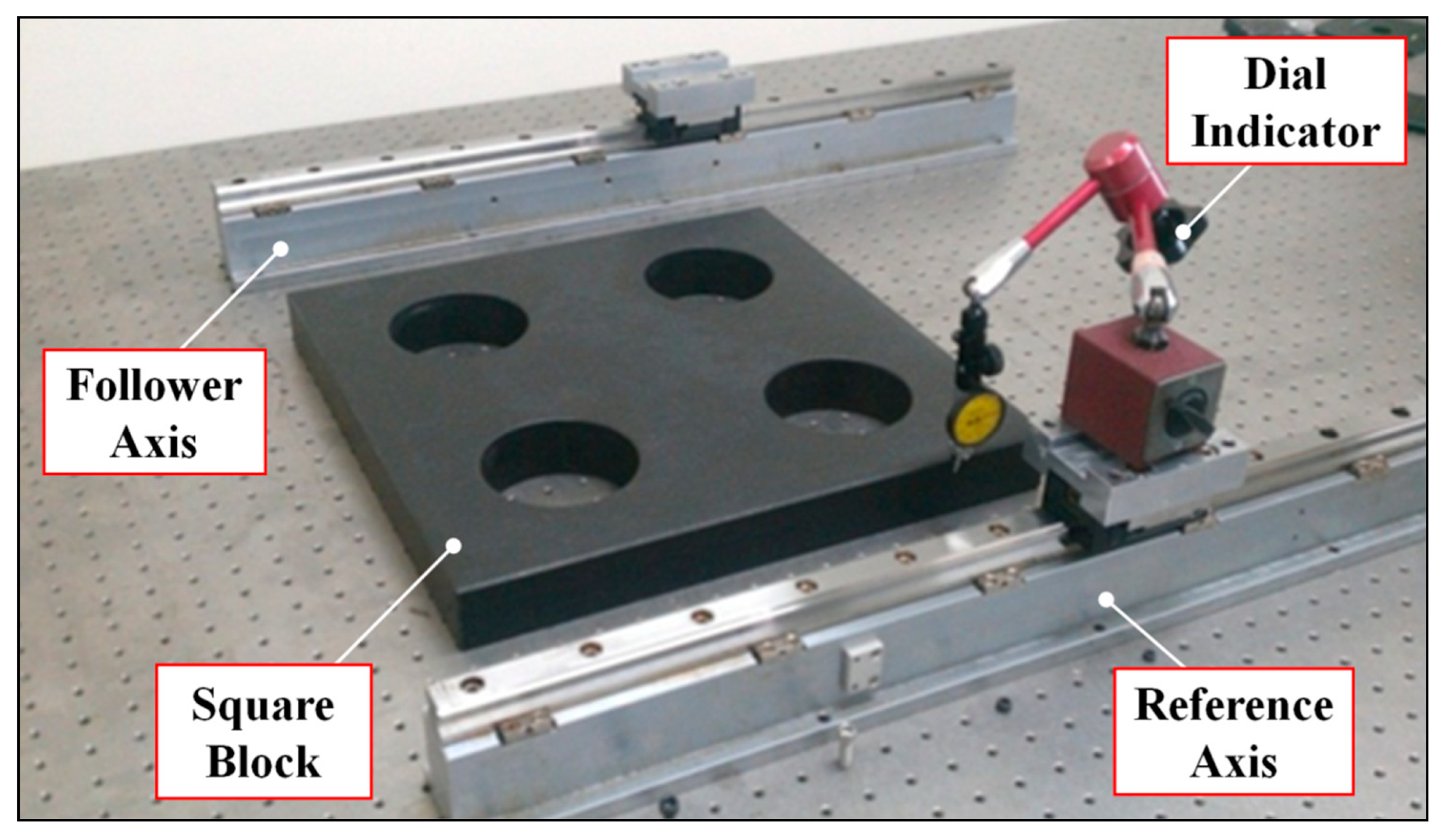
The traditional measurement tools used for geometric error inspection of a linear guideway are granite reference blocks (square, tri-square, straight edge, parallels, etc.) plus a dial indicator, which are heavy, easily scratched, single-purpose, and low-accuracy compared to laser instruments, especially for the case of long-travelling measurements. A laser interferometer is the most reliable instrument for error measurement of displacement, straightness, yaw, and pitch; however, it can only measure one error at one time with a time-consuming setup process.
In recent years, numerous geometric error measurement systems based on multi-beam interference with flat mirrors, or multi-beam laser with position sensing detector (PSD) and/or quadrant detector (QD) have been developed to simultaneously obtain multiple errors during one test for both off-machine and on-machine measurements.
The typical solution based on multi-beam interference adopts a laser measuring system with a dual flat-mirror. Sommargren [
1] proposed a dual measurement interferometer that is able to concurrently measure both linear and angular displacements for wafer stage metrology. Nakamura et al. [
2] utilized four interferometers and one corner cube for measuring three dimensional (3-D) coordinates of a microscopic scanning stage. Lee et al. [
3] proposed a method with two laser interferometers to measure wafer planar positioning errors and a laser interferometer to measure angular errors.
Menq et al. [
4] designed an interferometer system for the measurement of
x–y motion errors of wafer stages. In this system, incident beams are tilted with certain angle using a wedge prism, and an additional corner cube and a plane mirror are placed off the stage to help return the measuring beam. Zhang et al. [
5] developed a laser interferometric system for real-time measurements of six-axis motions of a magnetic levitation stage by utilizing two corner cubes, six plane mirrors, and six polarization beam splitters (PBS). Jywe et al. [
6] utilized two laser interferometers and two plane mirrors to measure three degrees of freedom (3-DOF) of the dual-axis nano-positioning stage, and successfully obtained the nano-scale positioning accuracy of linear and rotation motions.
For the geometric error measurement systems based on multi-beam with PSD and/or QD, Ni et al. [
7,
8] proposed a laser optical multi-degree-of-freedom measurement (MDFM) system, which utilized two sets of PSDs to calibrate five degrees of freedom (5-DOF) of coordinate measuring machines. Shimizu et al. [
9] proposed an optical measurement system using one laser interferometer and three QDs for the measurement of 6-DOF linear motion errors of a machine tool table. Chou et al. [
10] also developed an MDFM system based on two dimensional (2-D) charge-coupled device (CCD) cameras instead of QD in order to correct the geometric errors of coordinate measuring machines.
For the research on multi-beam measurement devices integrated with PSD or QD, Fan et al. [
11] proposed a multi-function error measuring system using three sets of quadrant detectors for inspecting the 5-DOF of CNC machine tools. Fan et al. [
12] developed a six degrees of freedom (6-DOF) measuring system by using four laser Doppler scales, two L-shaped plane mirrors, one long right-angle mirror, and two QDs for the measurement of six motion errors of a wafer stage. Jywe et al. [
13] proposed a simple and low-cost technique using a laser diode, a one dimensional (1-D) grating, two PSDs, and a reference rotary table with good repeatability to measure the four degrees of freedom (4-DOF) errors of a rotary table for a 360° full circle.
You et al. [
14] proposed a straightness error measurement device based on common-path compensation for the elimination of laser beam drift by utilizing an optical module consisting of a PSD and a QD. Jywe et al. [
15] developed a novel optical calibration system using two sets of QDs and one ball lens module to obtain the total error associated with simultaneous multi-axis movements of CNC machine tools. Huang et al. [
16] utilized a method for measuring 5-DOF errors of a moving stage with a monolithic prism and three PSDs. Yan et al. [
17] proposed a laser straightness interferometer system that is able to compensate the rotational error and simultaneously detect the 6-DOF error of a linear stage by using one PSD, two QDs, one Wollaston prism, one corner cube, and other optical components.
In view of the literature, the repeatability of geometric error measurements using a pentaprism could be further improved by introducing a calibration mechanism to detect the altitude angle between the incident beam and the pentaprism. Therefore, two methods are proposed in this study for calibrating the above altitude angle: The first method is designed for ease of use based on Michelson principle using a laser interferometer as the light receiver, and the second one is aimed for high calibration repeatability based on autocollimator principle using QD to replace the light receiver. The literature mentioned above (e.g., Ni et al. [
7], Fan et al. [
11], Huang et al. [
16], and Yan et al. [
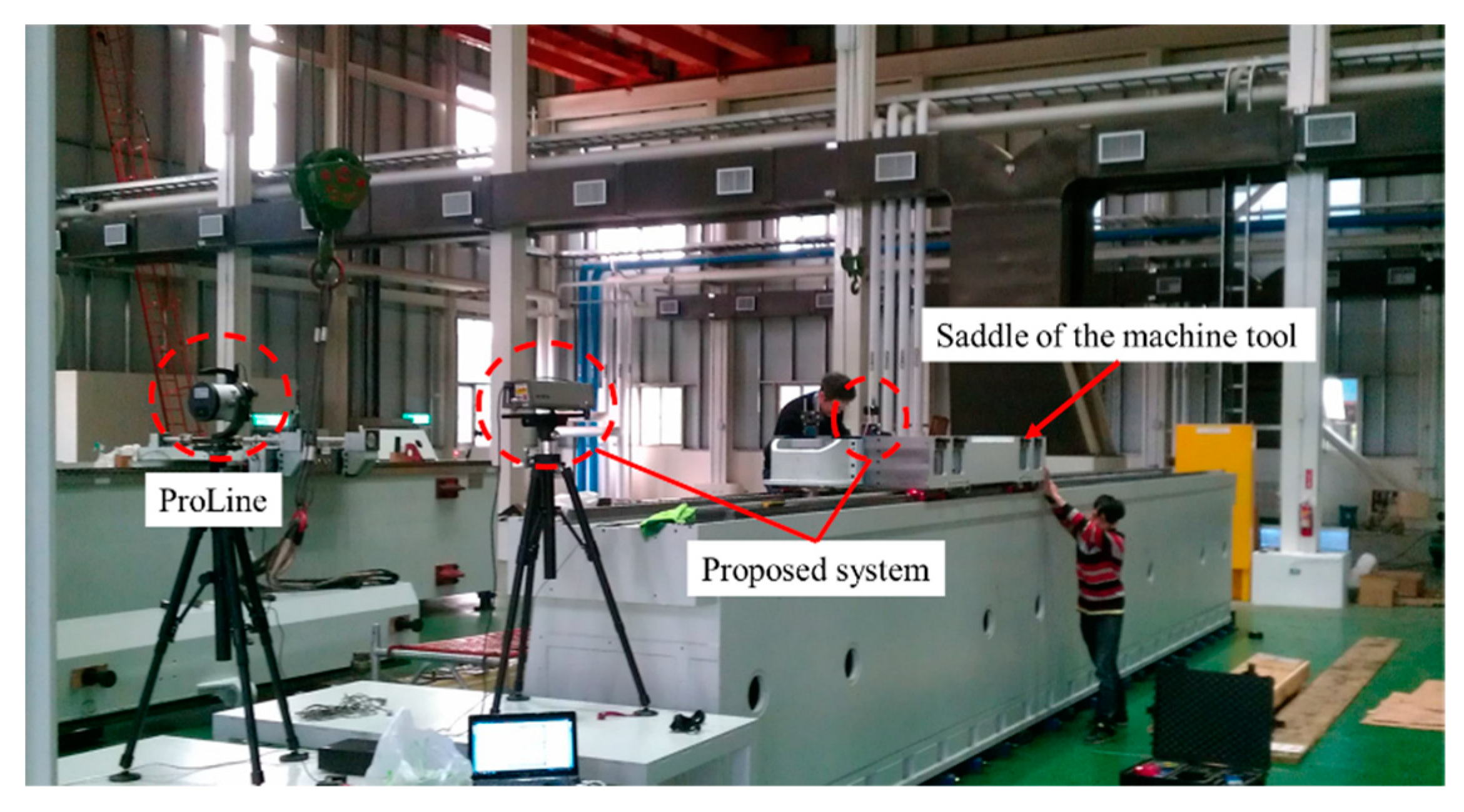
17]) proposed an MDFM system for single axis motion, respectively. However, these systems were composed with large numbers of optical lenses or optical components, which were difficult to setup and use in fabrication site of the factory. Compared with the reduced optical components compact module designed for the proposed system, which is capable of applying to the large linear guideway assembly process of various double-column, three-axis, and five-axis machine tools, the measurement range was up to 6000 mm and the horizontal and vertical straightness errors can be obtained in one measurement. Additionally, there is no need to reset the system if the laser source is sheltered during the measurement process.
2. Measurement Principles
In this study, a commercial laser interferometer (5529A, Agilent Tech., Santa Clara, CA, USA), which is commonly utilized as a measuring instrument by machine tool industry, is used as a dual-frequency laser source. The PSDs used in this study are dual lateral detectors (DLS-10, OSI Optoelectronics, Hawthorne, CA, USA), which are utilized for detecting the 2-D position deviation of the incident beam spots on the surface of each PSD. The calibration experiment result shows that the repeatability of the dual lateral detector is up to 1.0 μm with a distance of one meter.
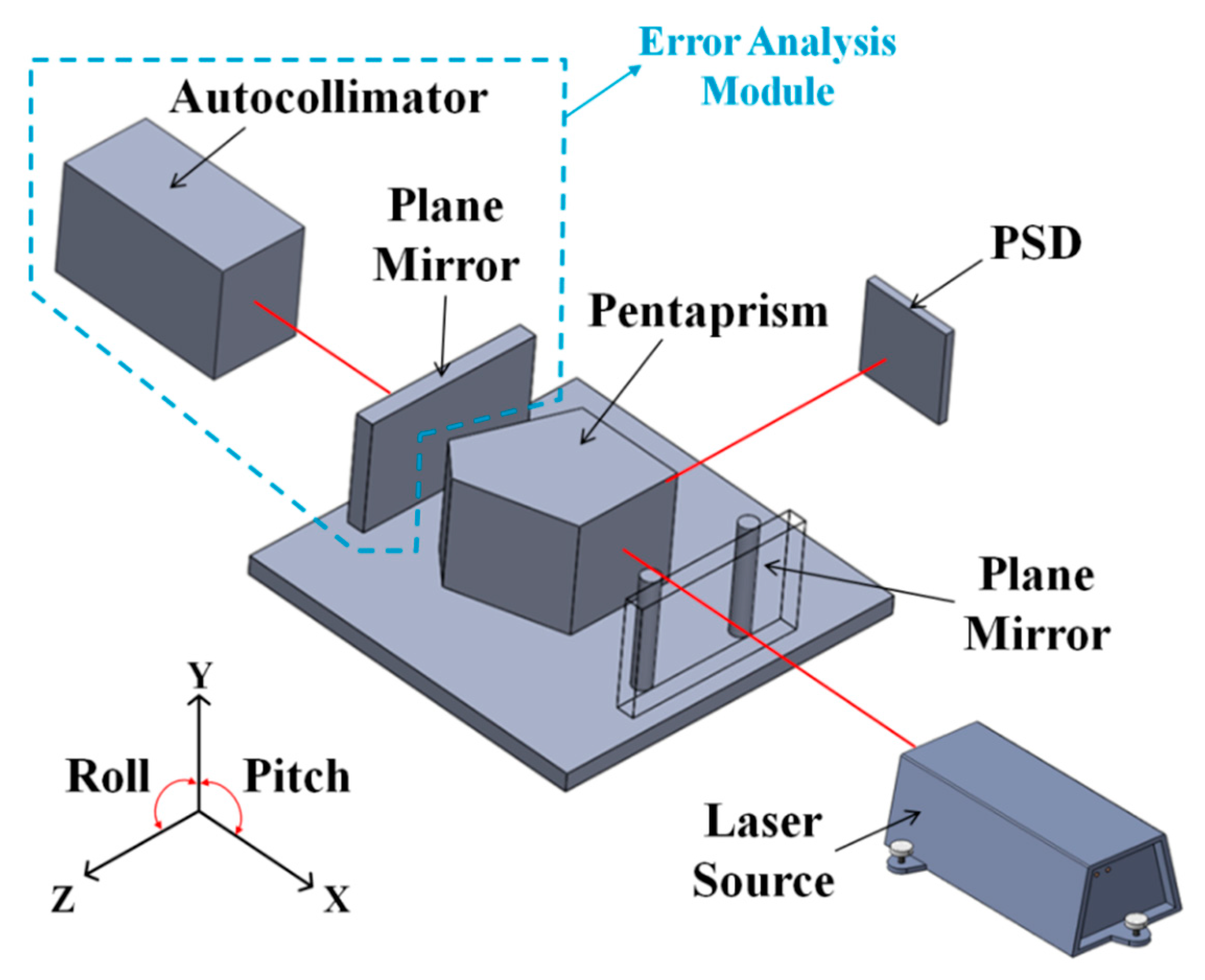
2.1. Pentaprism Module
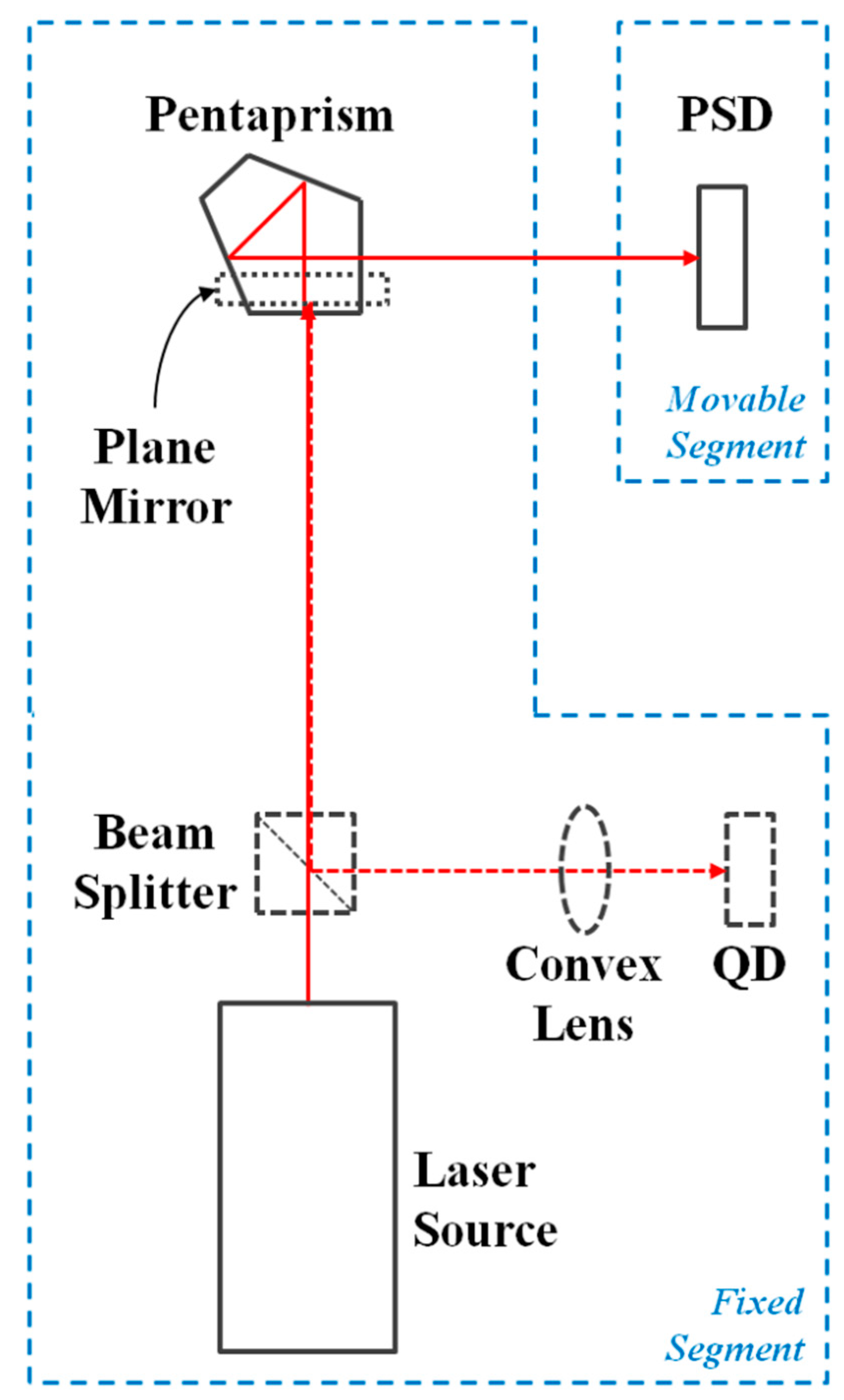
In addition to dual laser interferometer and PSD, a pentaprism module with a lifting mechanism was also developed for the geometric error measurement in this study. The pentaprism (BPP-12.7, Newport, Irvine, CA, USA), a five-sided reflecting prism, was utilized to deflect the incident laser beam by exactly 90°, regardless of the incident angle. For keeping the maximum intensity of the reflected beam, the light receiver of the laser interferometer and a plane mirror were utilized to ensure the altitude angle between the pentaprism module and the laser source.
The setup process of the pentaprism module is described as follows: The plane mirror placed above the pentaprism is first lifted up to receive the laser beam by adjusting the lifting mechanism of the pentaprism module for refracting the incident laser beam back to the optical field receiver of the laser source. The altitude angle between the laser source and the pentaprism module is ensured by keeping the maximum optical intensity of the backed beam. After ensuring the altitude angle with the maximum reflected beam intensity, the pentaprism is then lifted up to receive the laser beam by again adjusting the lifting platform of the pentaprism module.
The optical arrangement of the beam module and the pentaprism module is shown in
Figure 1.
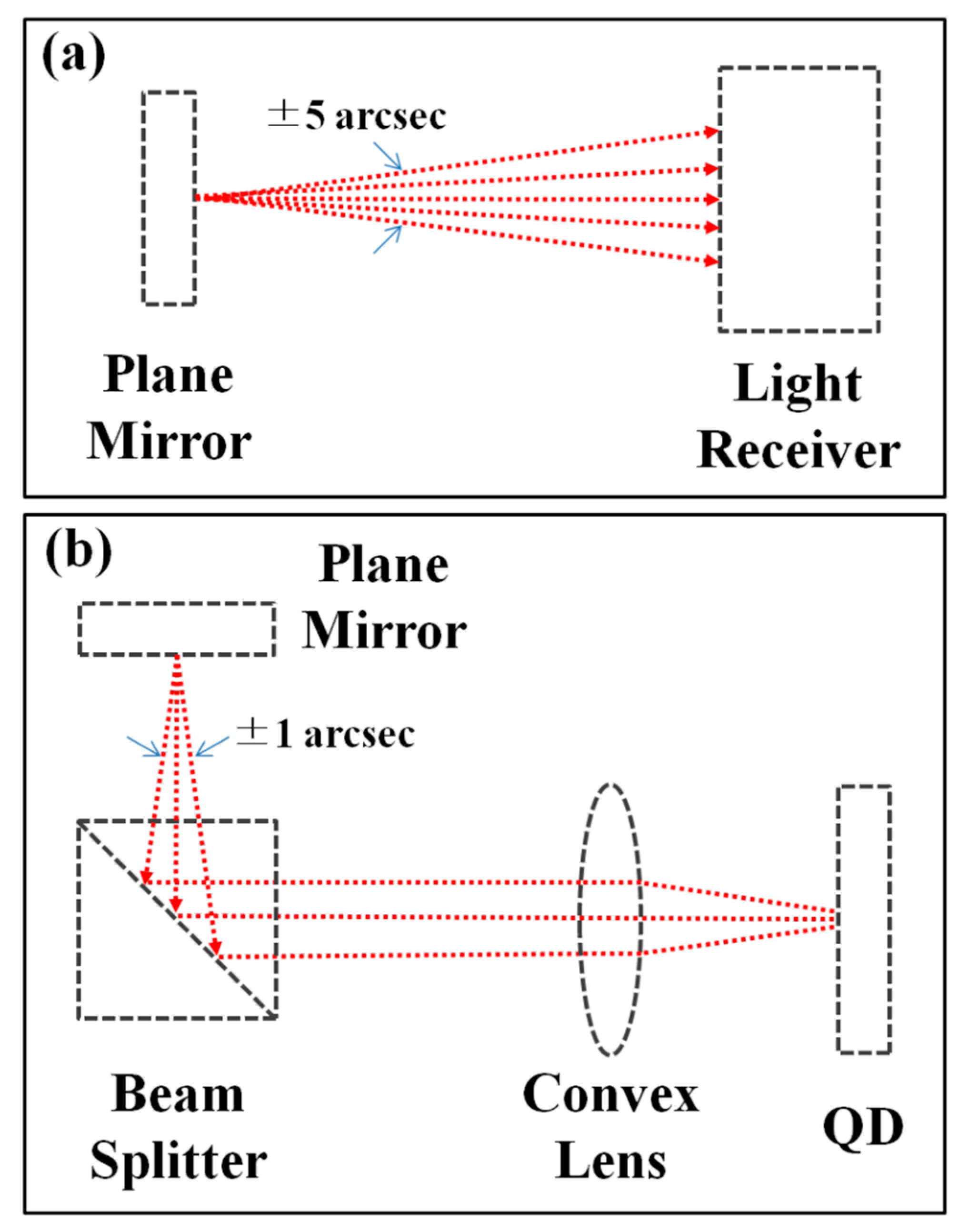
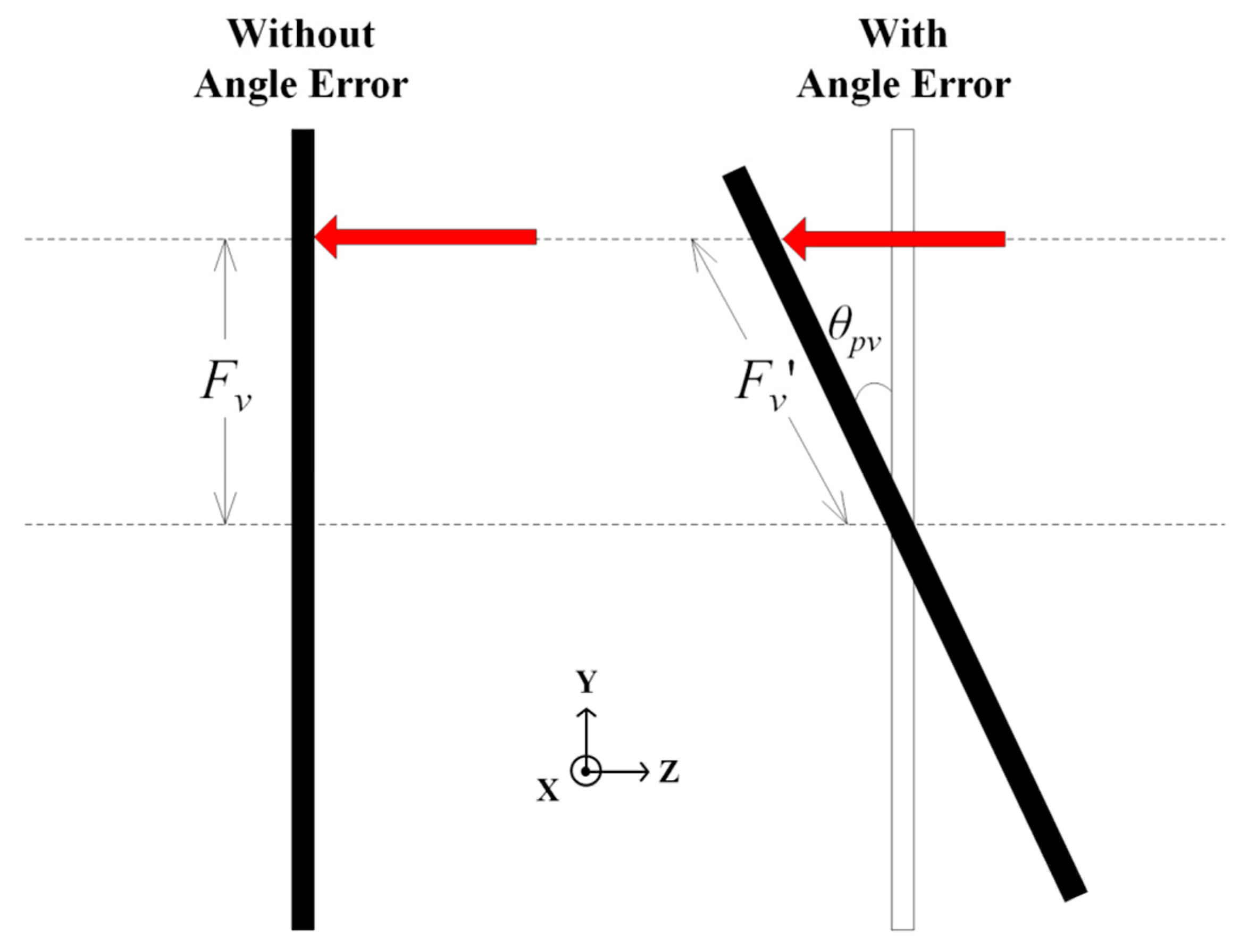
For the commercial laser interferometer, the coincidence between the reflected and the incident beams could be achieved by perpendicularly adjusting the altitude angle of the incident beam to the plane mirror by its light receiver according to the Michelson principle. However, with the feedback of calibration results, it was confirmed that the tolerance error of the “100% coincidence” measured by the commercial laser interferometer was about ±5 arcsec, which could result in poor measuring repeatability, especially for the case of long-range measurements, as shown in
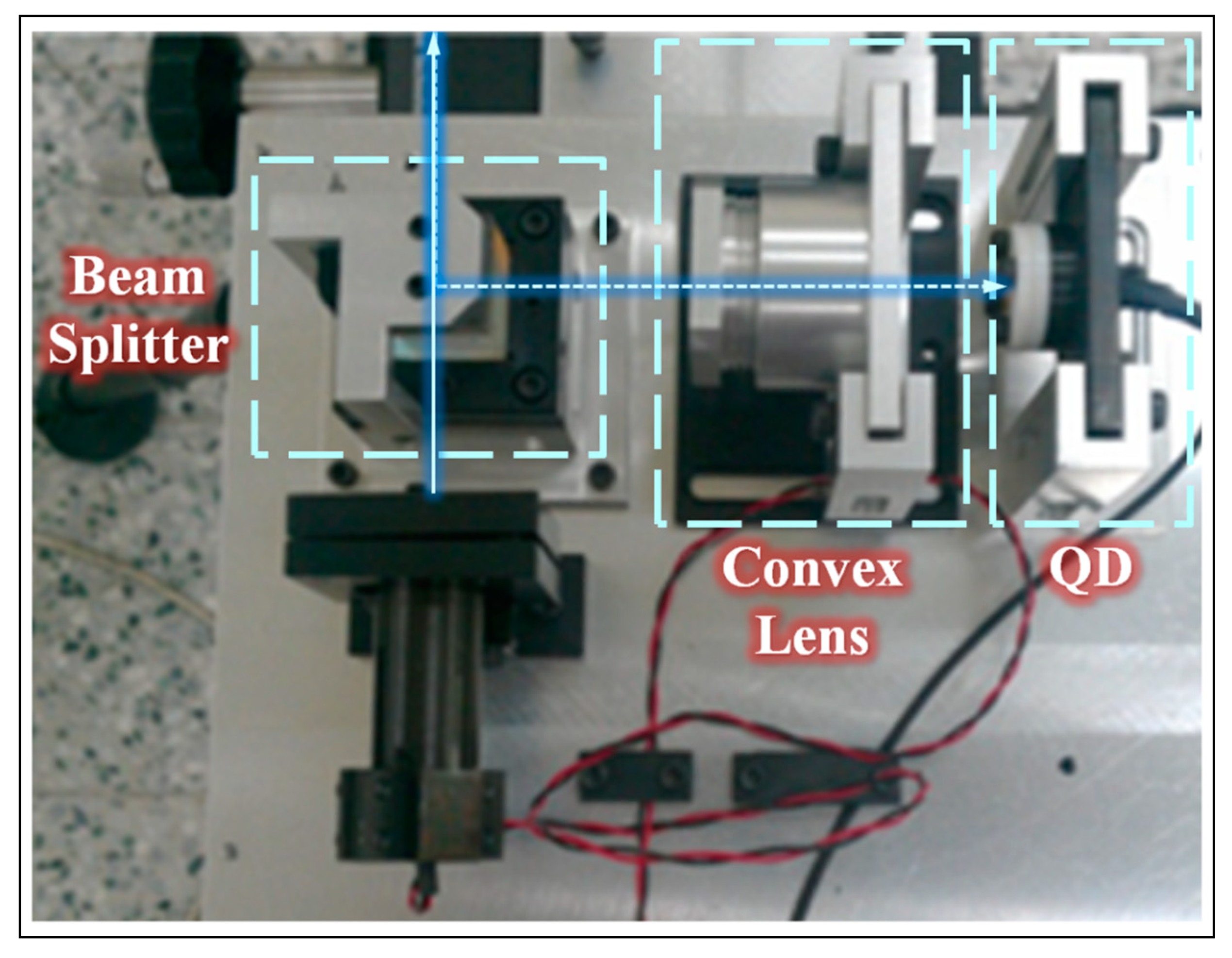
Figure 2a. Therefore, an altitude angle adjustment module composed of a beam splitter, a convex lens, and a QD was proposed based on the autocollimator principle [
18] for obtaining higher calibration repeatability, as shown in
Figure 2b and
Figure 3. With the proposed module, the reflected beam was deflected by the beam splitter and passed through a convex lens onto QD, and the tolerance error of the “100% coincidence” could be reduced to ±1 arcsec.
Testing results showed that the perpendicularity repeatability (3σ) with a measuring distance of 2 m was greatly reduced from 5.7 arcsec (27.63 μm/m) to 1.6 arcsec (7.56 μm/m), proving the feasibility of the proposed altitude angle calibration module. Practically, the altitude angle between the laser source and the pentaprism could be calibrated using the first method based on the Michelson principle mentioned above for laboratories and factories owing to the Agilent 5529A interferometer, and the second method, based on autocollimator principle mentioned above, could be used for high calibration repeatability applications.
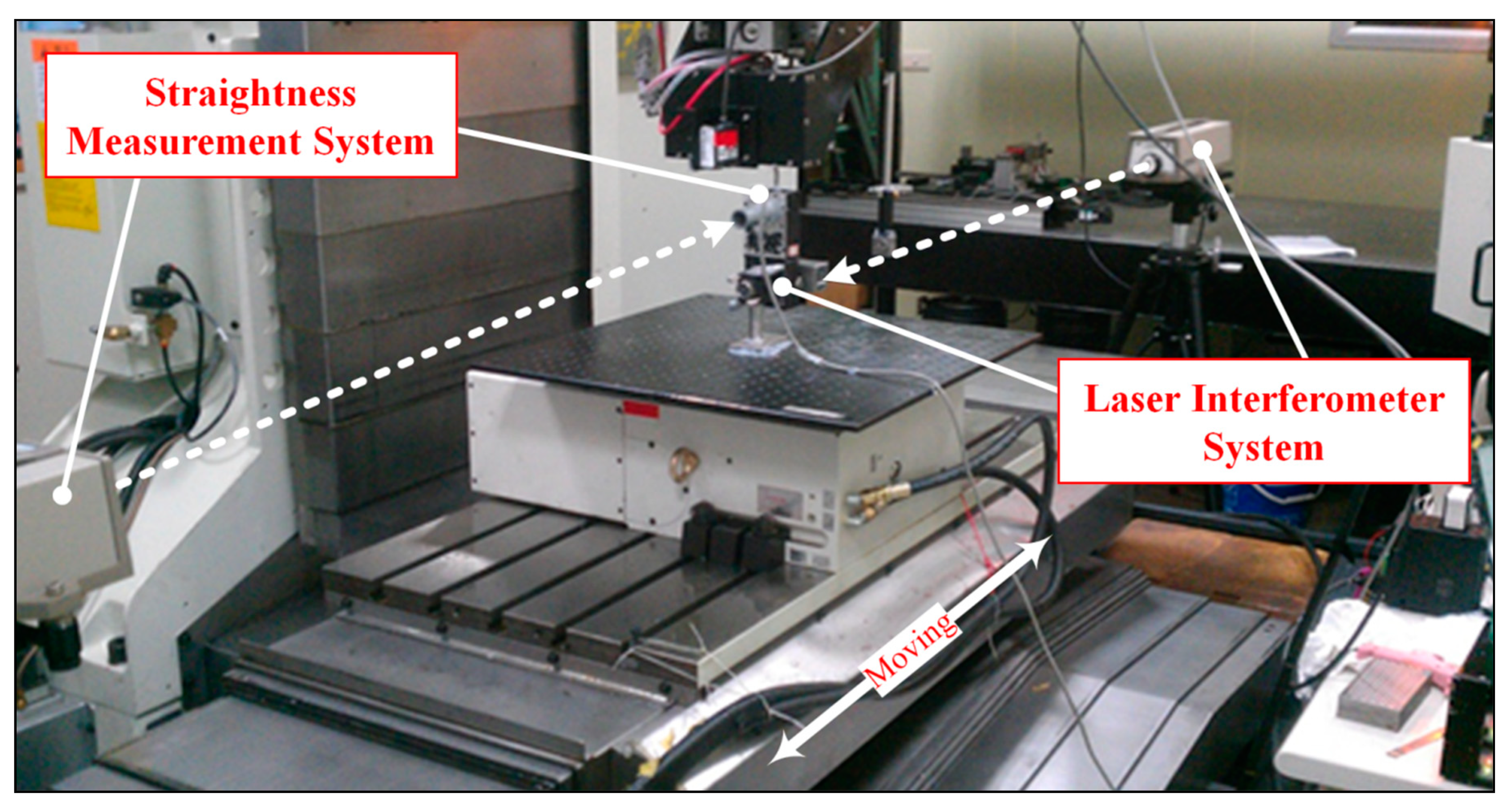
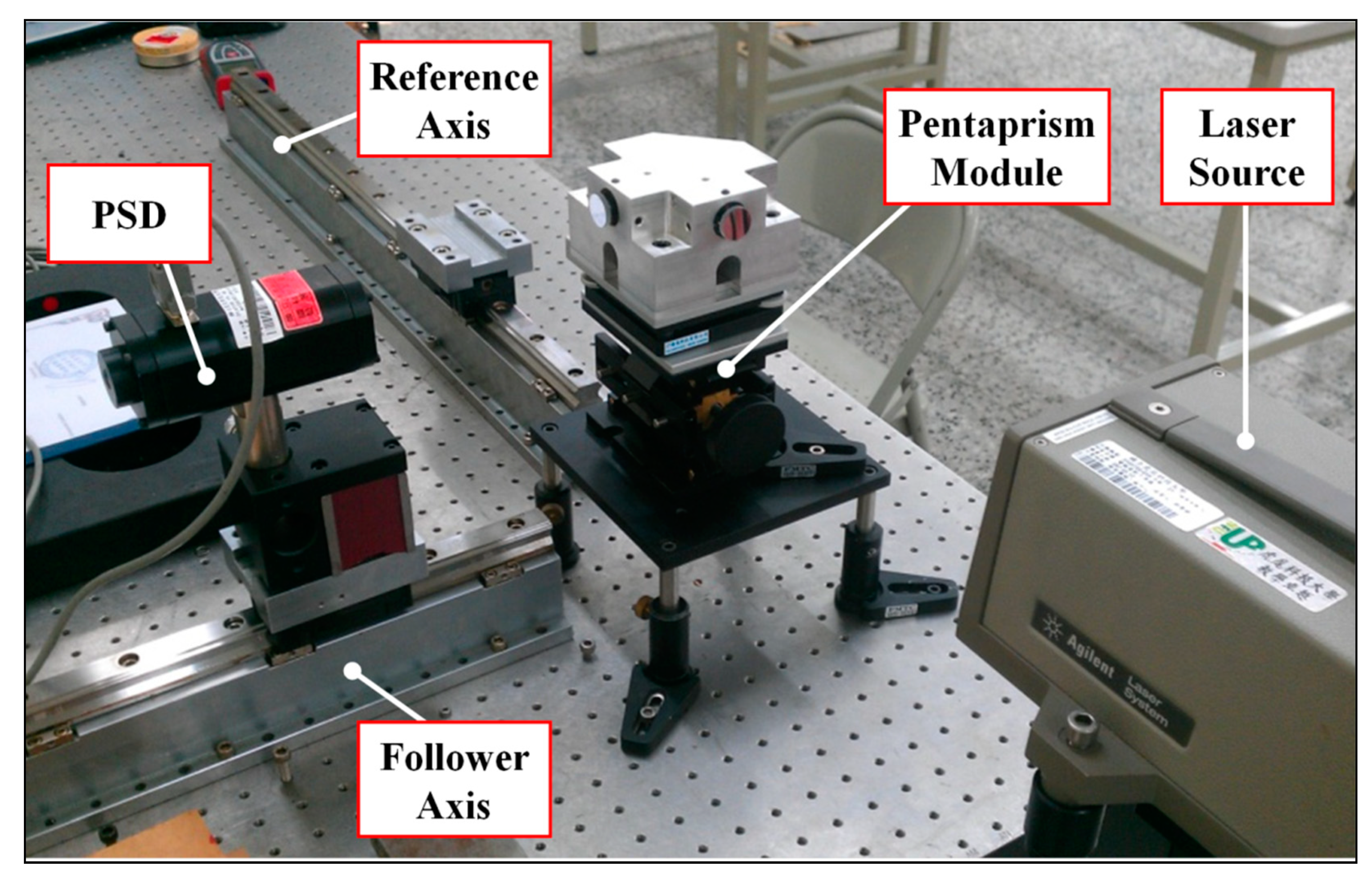
2.2. Straightness Measurement Module
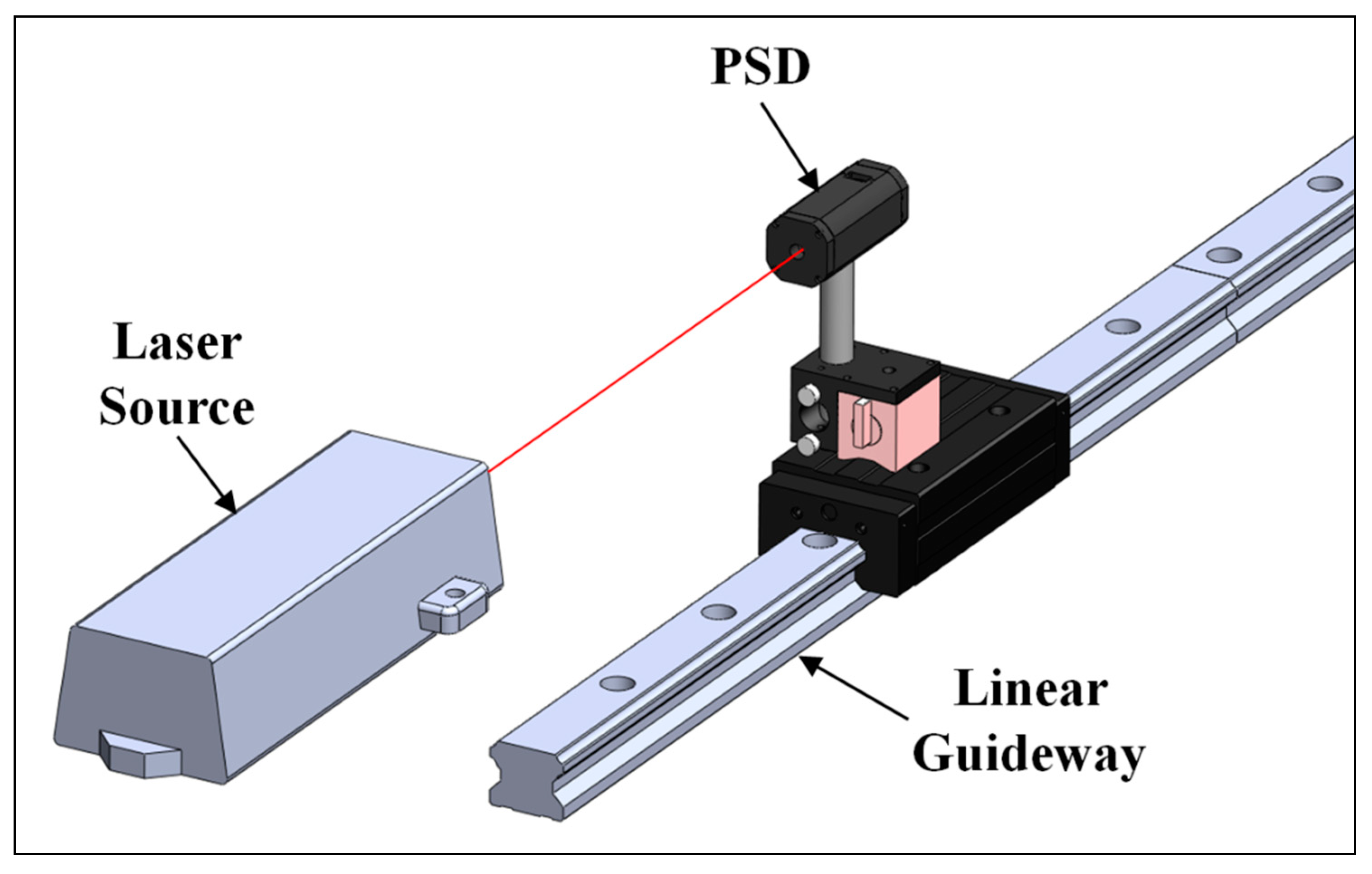
The proposed straightness measurement module is composed of a PSD (Dual lateral), a signal processor, a data acquisition card (USB-6210, National Instruments Co., Taipei, Taiwan), and a laser source, as shown in
Figure 4. The straightness error is the extent of the actual path deviating from a straight line, which can be divided into horizontal and vertical straightness errors [
19].
The linear least-squares method is used for analyzing the geometric errors in this study, which is to find the equation of the straight line that minimizes the sum of the squares of deviations calculated from PSD-measured points:
The straightness error
can be expressed as:
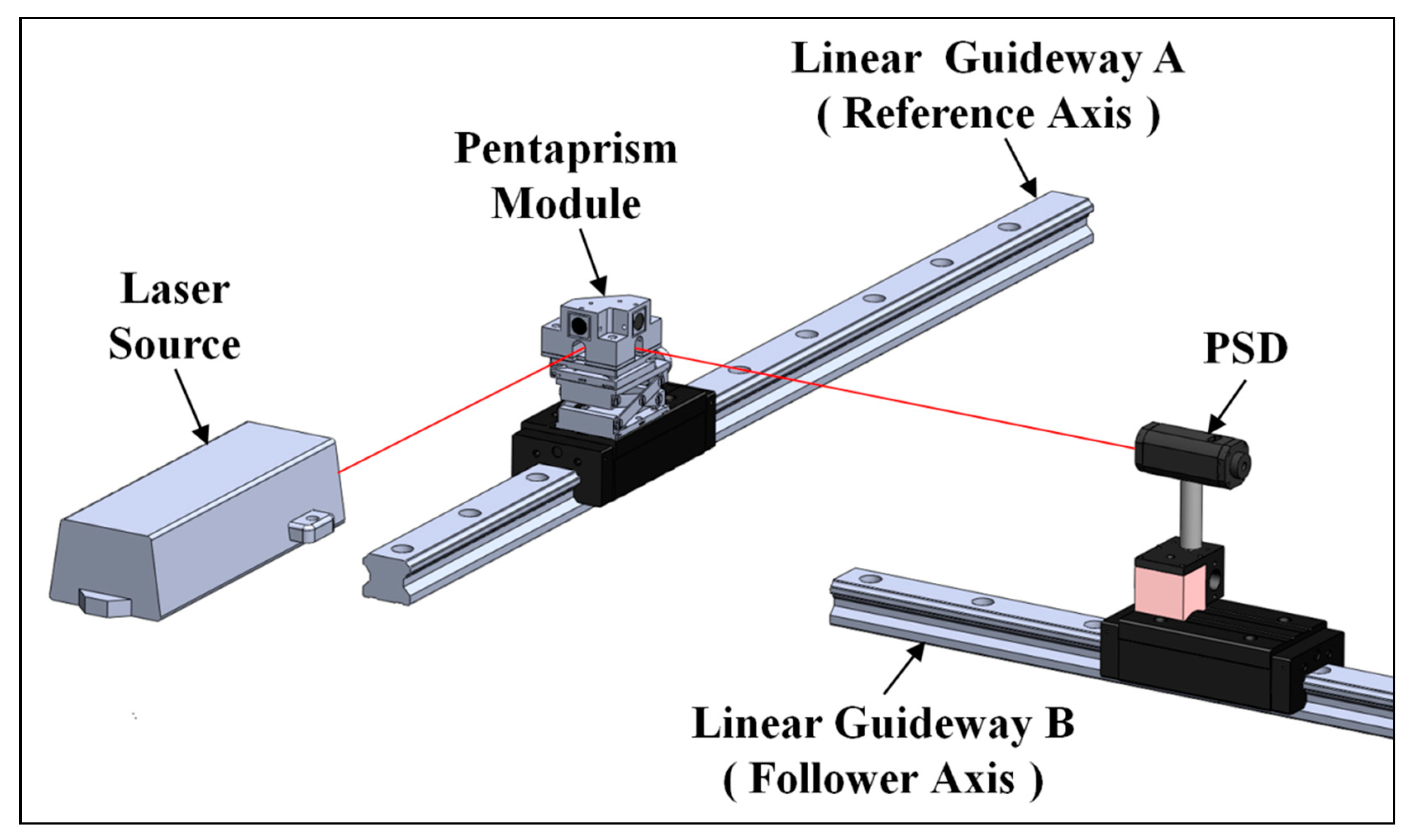
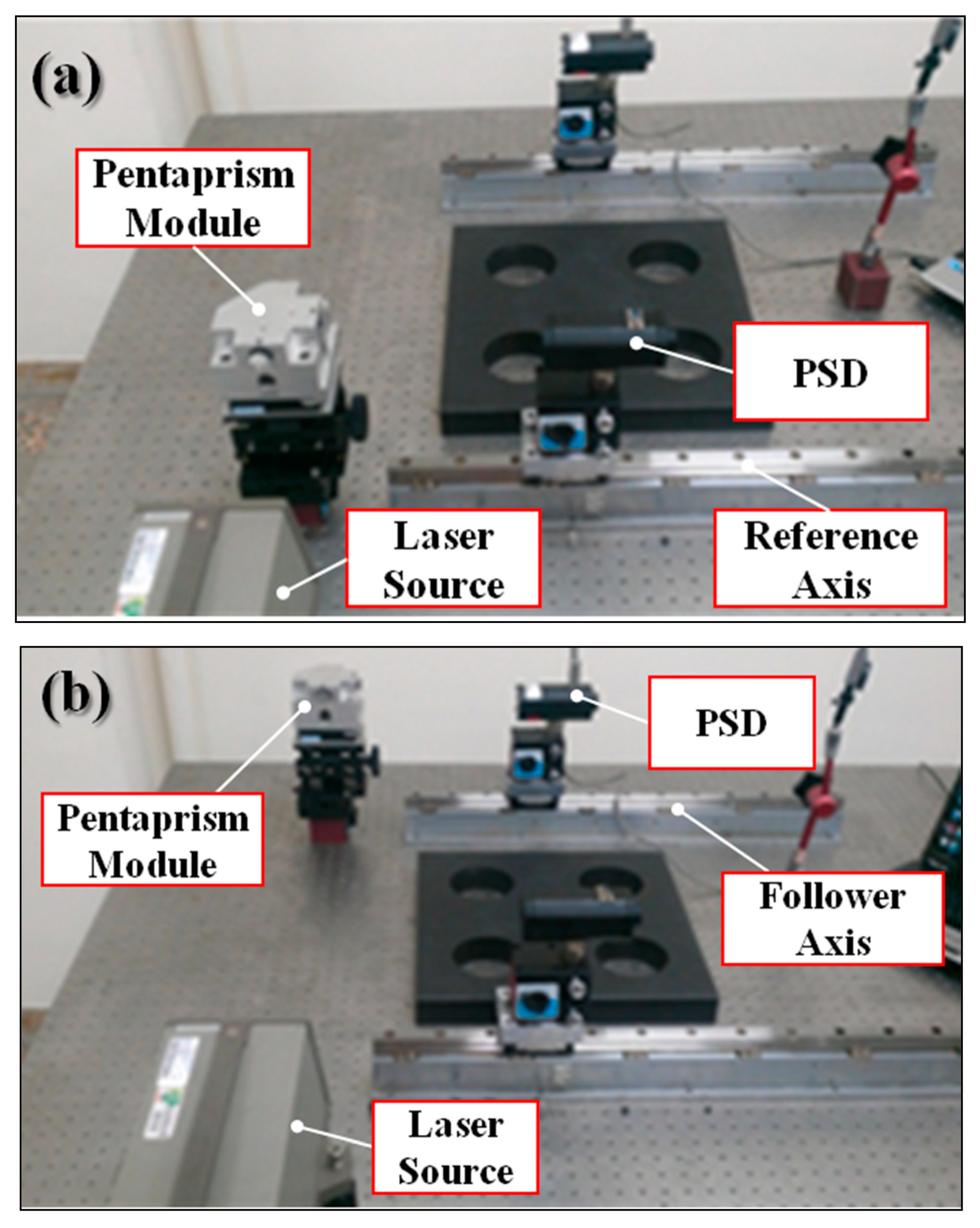
2.3. Perpendicularity Measurement Module
Figure 5 shows the proposed perpendicularity measurement system, which was mainly composed of the straightness module and the pentaprism module, as mentioned in previous sections. The perpendicularity measurement process is described as follows:
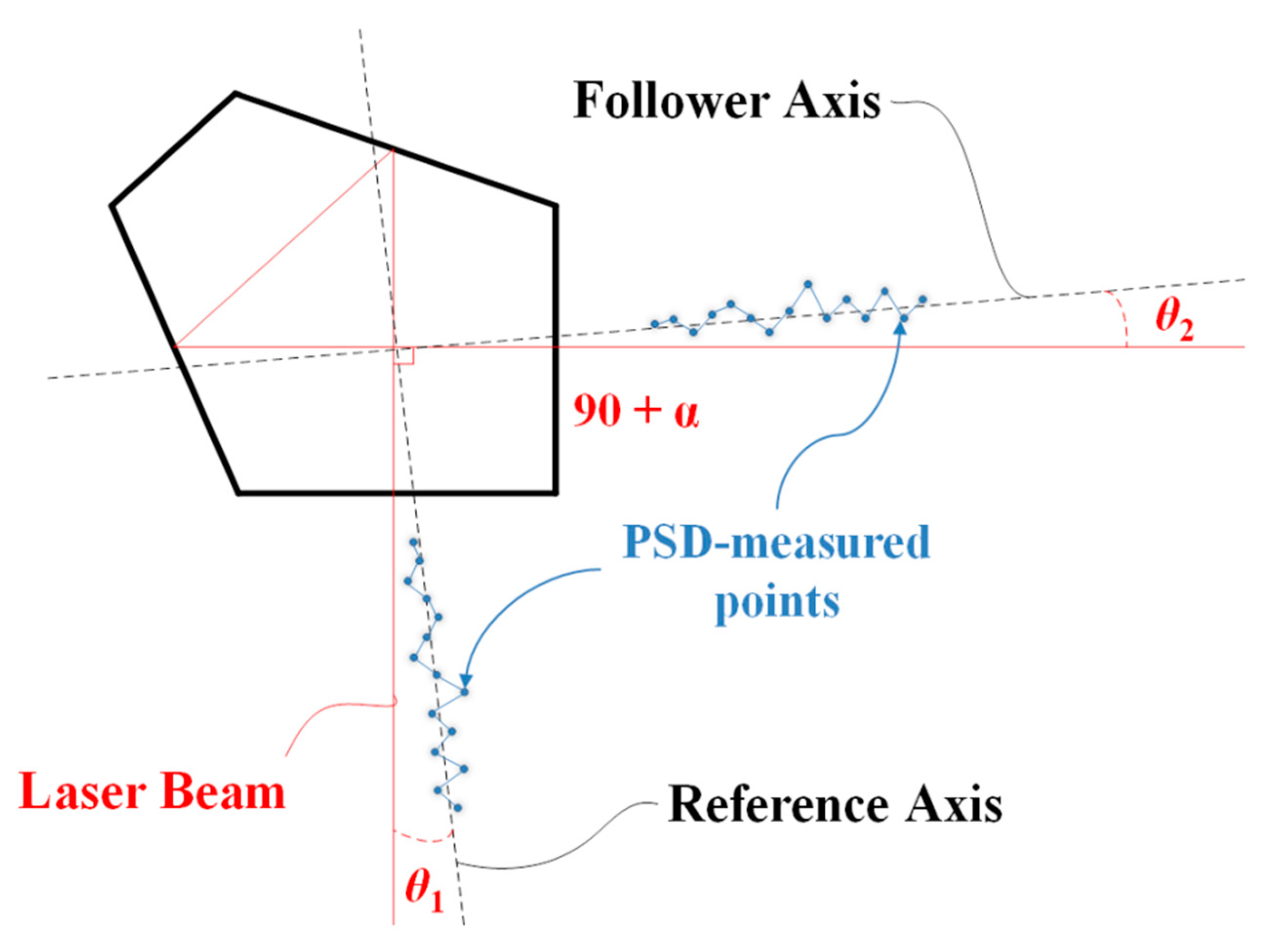
First, the deviation angle of the incident beam
θ1 (as shown in
Figure 6) was calculated via the least-squares analysis of the measured points detected by the PSD set upon the linear guideway
A.
Secondly, the PSD was moved and remounted on the linear guideway B; thereupon, the pentaprism module was set at the cross-point of linear guideway A and the extended line of linear guideway B, allowing the incident beam be refracted by 90° and projected on the re-set PSD.
Finally, the deviation angle of the refracted beam θ2 was also calculated via the least-squares analysis of the PSD-measured points.
The perpendicularity error
can be obtained by the arctangent relation of
θ1,
θ2, measured distance
D, and the pentaprism error
α (±30 arcsec), as shown in
Figure 6:
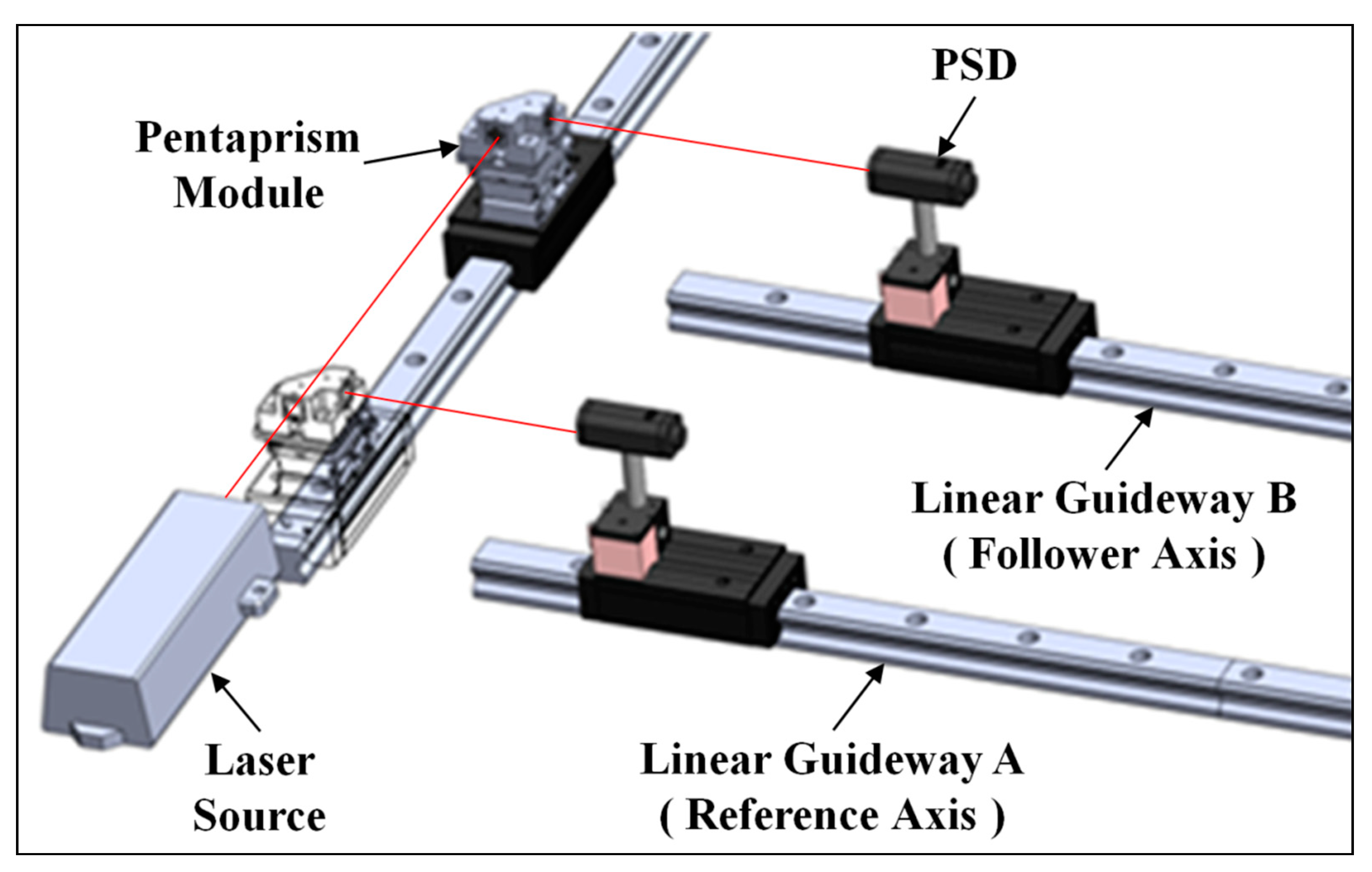
2.4. Parallelism Measurement Module
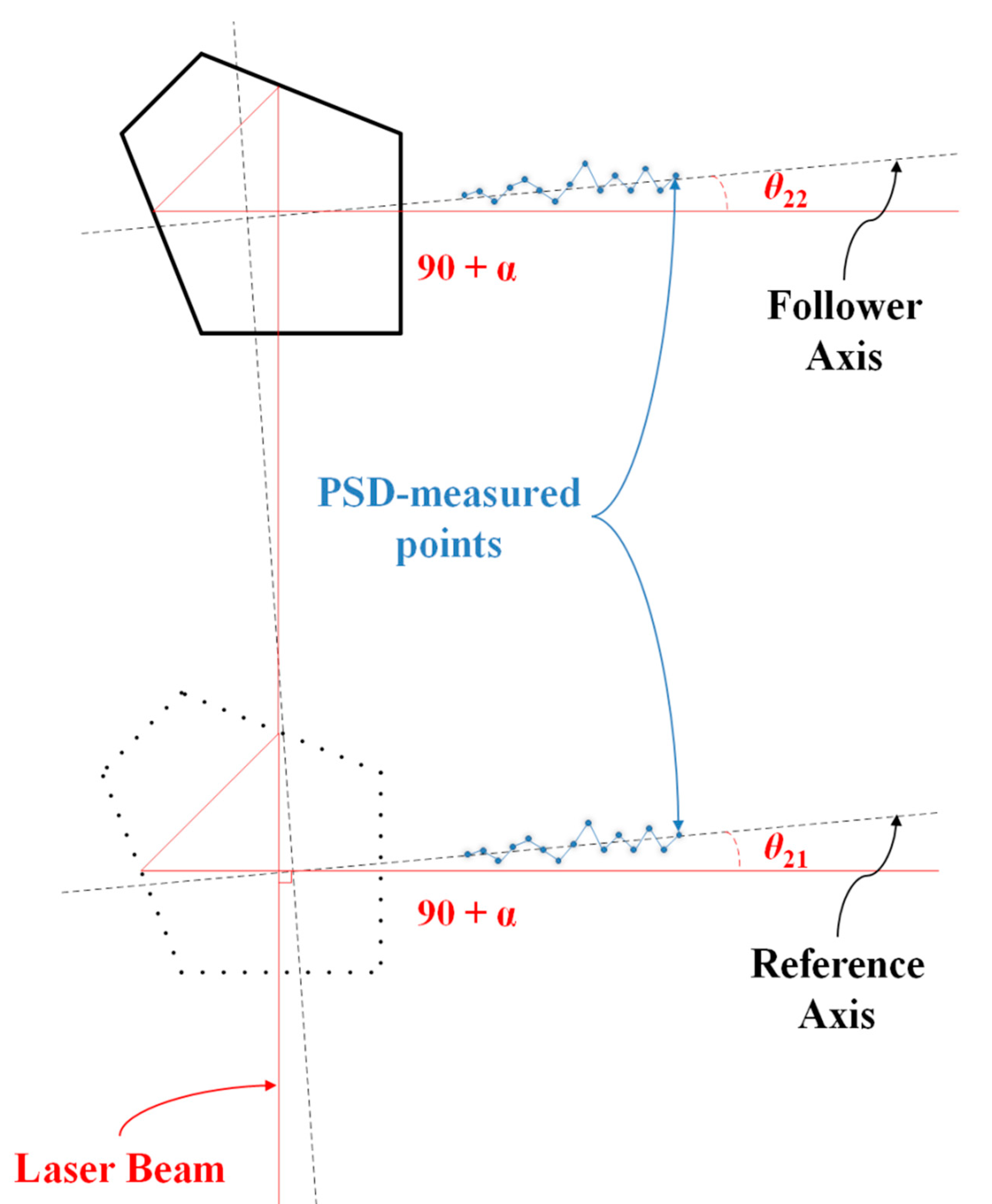
The measurement and setup principle of the parallelism is almost the same as that of perpendicularity described in the previous section; the only difference is the beam path utilized in the measurement, as shown in
Figure 7.
The deviation angles of the refracted beam
and
were also calculated via the least-squares analysis of the measured points detected by the PSD set upon the linear guideway, respectively. The perpendicularity error
can be obtained by the arctangent relation of
,
, and the measured distance
, as shown in
Figure 8:
3. Uncertainty Analysis
The proposed system comprises one laser source, one pentaprism module, and one PSD module; therefore, any setup errors among any of these components absolutely influence the system uncertainty. The details are explained below.
3.1. Laser Source Setup
During the measuring process, the laser source setup could be affected by the unstable foundation, machine operation, crane movement, staff walking, etc. The longer the distance is, the worse the measurement results; therefore, there is a need of an error analysis toward the laser source.
As depicted in
Figure 9, suppose the distance between the laser source and the fixed end is
, the error angle of laser source at vertical direction (
) will generate an error
:
Table 1 lists the setup errors in the vertical and horizontal directions of the laser source due to surface ground vibration with various measurement distances according to Equation (5).
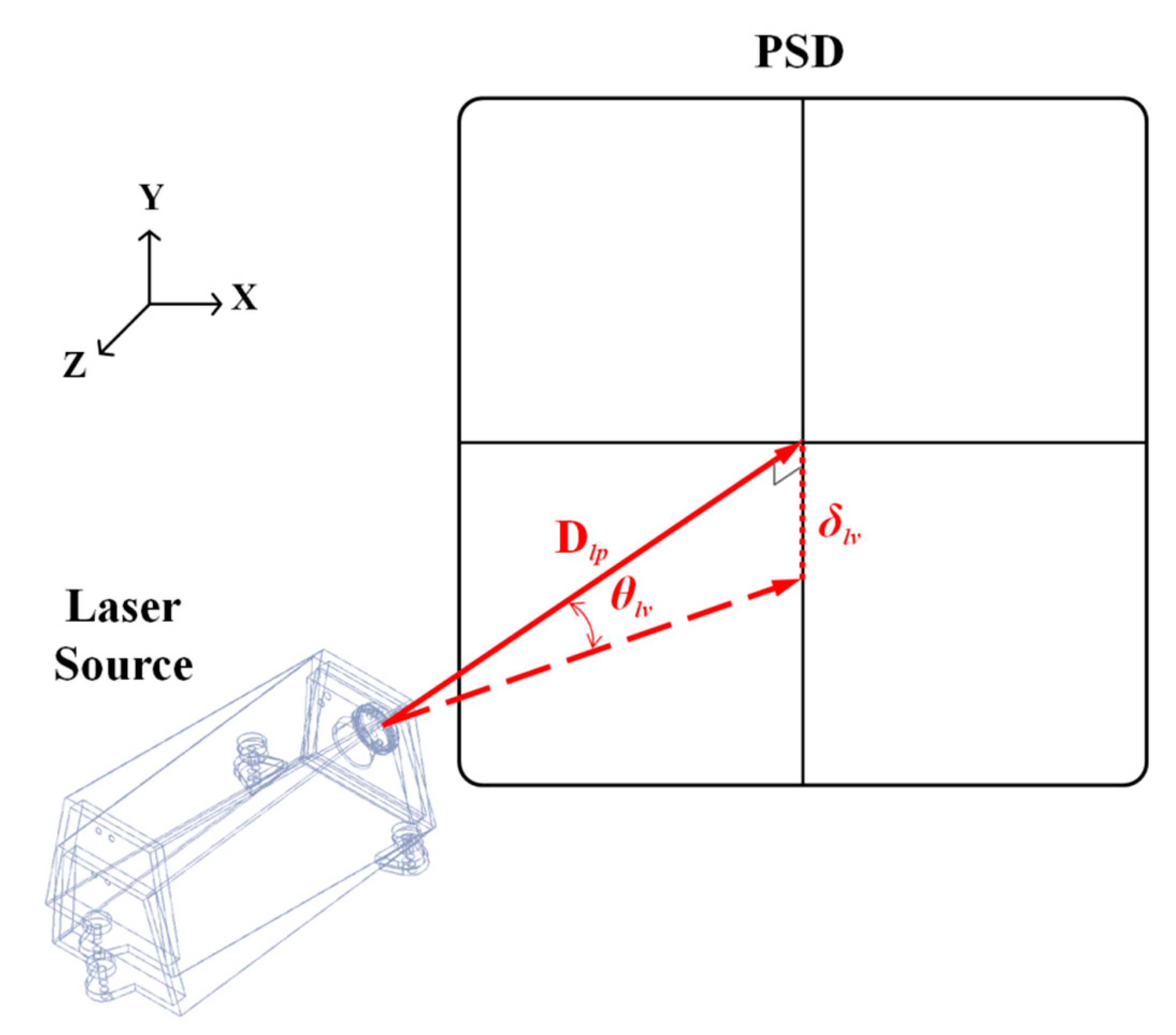
3.2. PSD Setup
There is usually an angle error due to the setup of PSD, and it will result in a cosine error in the vertical or horizontal direction, as shown in
Figure 10. Assume
is the error measured in the vertical direction from the center of the PSD detection area, and
is the error originated from PSD setup when an angle deviation
exists, we get:
Table 2 lists the setup errors in the vertical and horizontal directions of the laser PSD due to surface ground vibration with various measurement distances according to Equation (6).
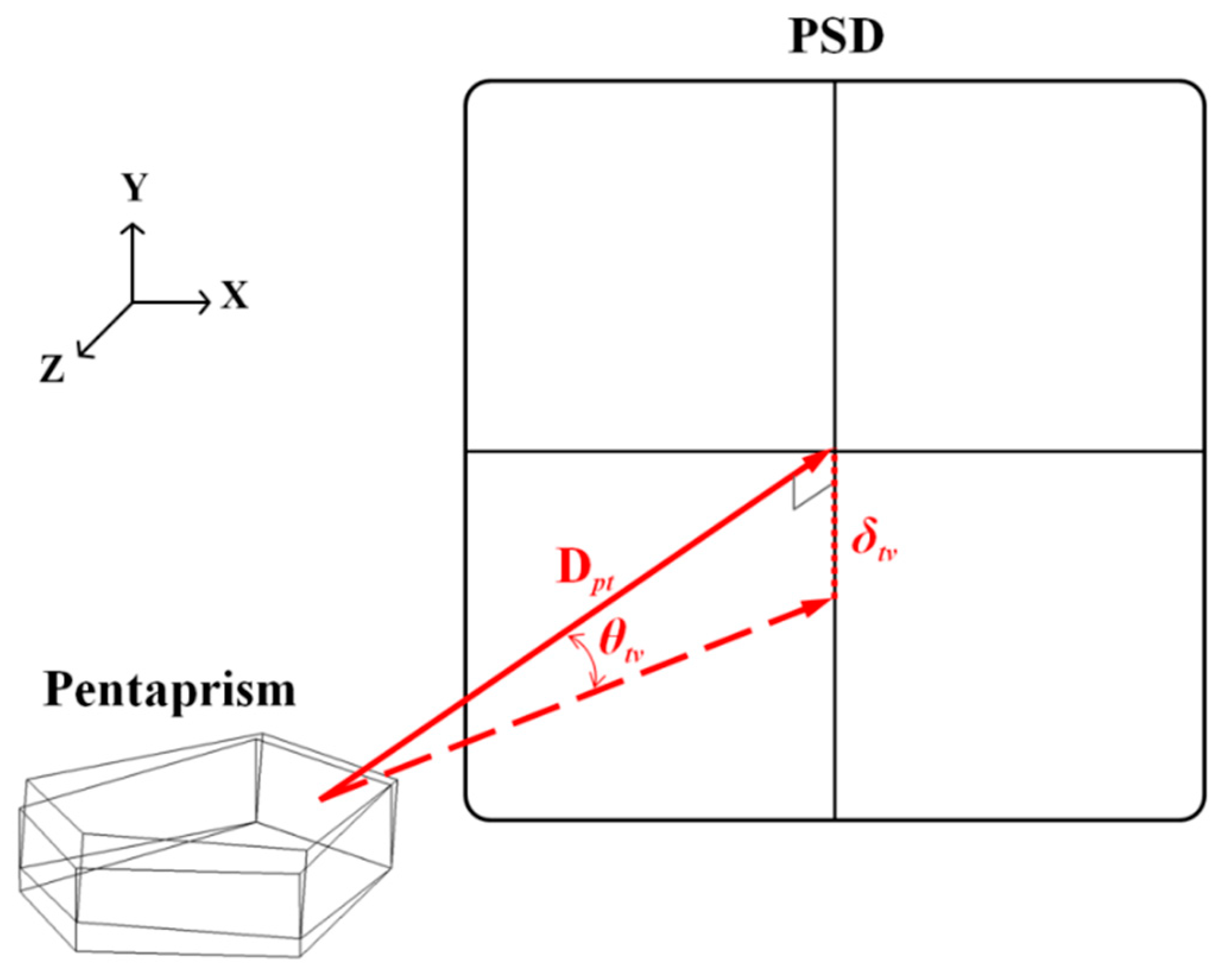
3.3. Pentaprism Setup
The setup error originated from the pentaprism module used in the perpendicularity and parallelism measurement was analyzed, as depicted in
Figure 11. Suppose the distance between the laser source and the fixed end is
, the error angle of the laser source in the vertical direction (
) will generate an error
:
The error analysis table of pentaprism in the vertical or horizontal direction is the same as
Table 1.
The measurement uncertainty of the proposed system can be obtained via partial differentiation of the linear displacements,
or
, along the horizontal or vertical direction (
x-axis or
y-axis), which were, respectively, measured by the position deviation of the light spot along the
x-axis or
y-axis of PSD. The linear displacements (
and
) can be expressed as:
Take the partial derivatives of
in Equations (8) and (9) with respect to the corresponding uncertain factors
,
, and
, we get:
The horizontal and vertical straightness measurement uncertainties (
and
) of compound errors can be expressed as:
In the present study, for vertical vibration in the environment is always higher than horizontal vibration; therefore, the error angle of laser source at vertical direction can be assumed to three times of the horizontal direction as: The horizontal direction : 20 arcsec and the vertical direction : 60 arcsec; otherwise the travel distance of the laser beam passes through the pentaprism were much longer, therefore, the error angle of pentaprism can be assumed to be twice that of the laser source as: The horizontal direction : 40 arcsec, and the vertical direction : 120 arcsec. Based on the calibration experiment, the angle setup error of PSD at the horizontal and vertical direction, and , can be assumed to be less than ±2.5°, the PSD measurement error F can be assumed to be less than ±100 μm, and the setup errors of the measuring distance, and , can be both assumed to be 1 m. Thus, the measurement uncertainties, and , were estimated to be ±1.02 and ±3.06 μm from Equations (12) and (13), respectively.
5. Conclusions
In this study, a multipurpose geometric error measurement system mainly composed of a laser source and a self-developed optical module has been developed for the measurement of straightness, perpendicularity, and parallelism errors for a linear guideway assembly process.
This includes two adjustment methods using an in-lab-developed optical module capable of calibrating the altitude angle of the pentaprism: The first method is designed for ease of operations based on Michelson principle and uses a laser interferometer as the light receiver, and the second one is aimed for high calibration-repeatability based on autocollimator principle using QD to replace the light receiver. The measured data are analyzed by the least-squares method in order to obtain corresponding geometric errors; meanwhile, the system uncertainty analysis is also conducted for the laser source, PSD, and pentaprism module for evaluating the system performance.
The features of the multipurpose geometric error measurement system presented in this paper are described as follows:
- (a)
There is no need to reset the system if the laser source is sheltered during the measurement process;
- (b)
The horizontal and vertical straightness errors can be obtained in one measurement;
- (c)
The system is capable of applying to the linear guideway assembly process of various double-column, three-axis, and five-axis machine tools;
- (d)
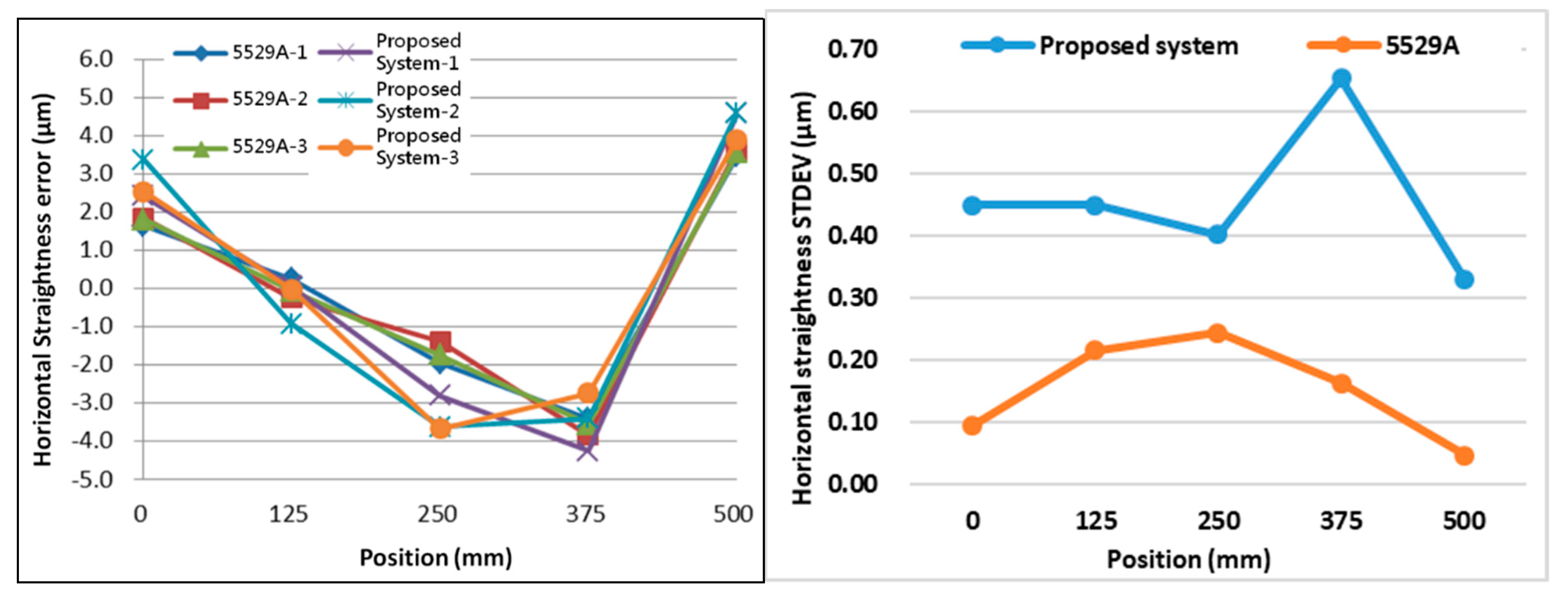
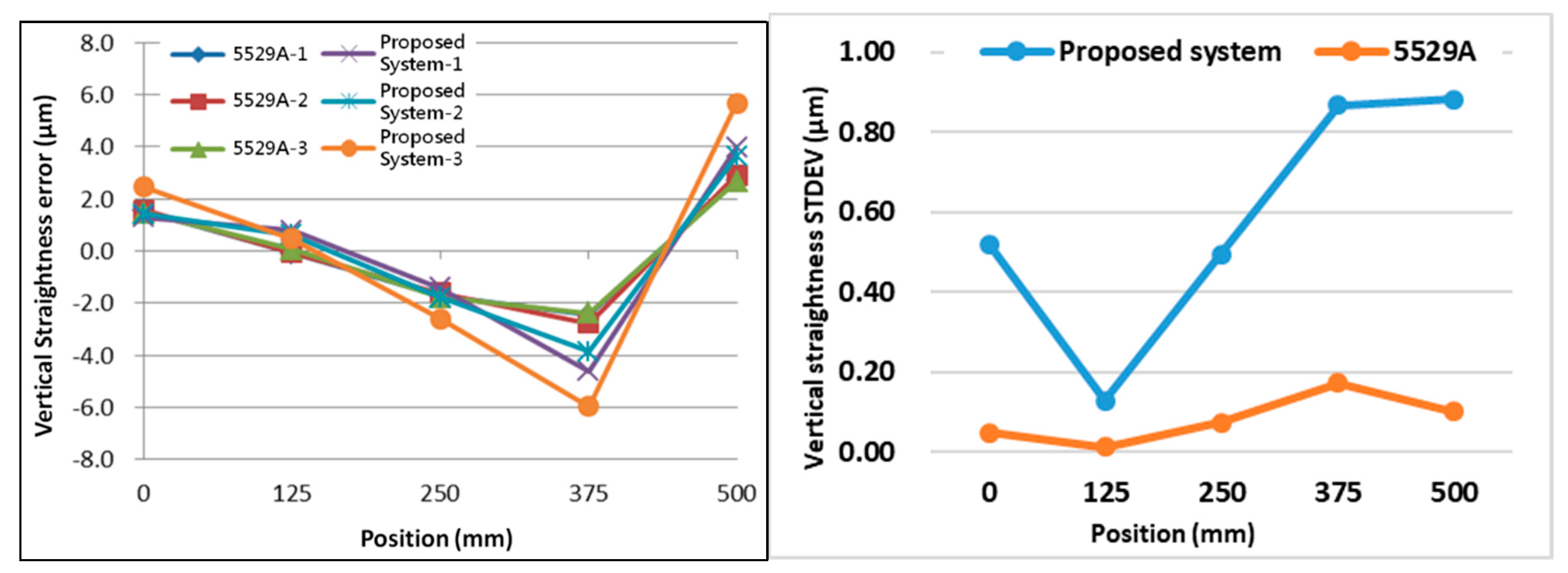
The residual error of the horizontal straightness, vertical straightness, perpendicularity, and parallelism are found to be ±1.3 µm, ±5.3 µm, ±1.2 µm, and ±0.1 µm, respectively, which are better compared to those detected by the commercial laser interferometer and granite reference blocks.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}