1. Introduction
Optical three dimensional (3D) shape measurement based on fringe projection is widely used in many fields such as industry inspection [
1], 3D thermal deformation measurement of electronic devices [
2], 3D point cloud reconstruction [
3], 3D printing [
4], face recognition [
5] and so on with its advantages of noncontacting measurement, full-field acquisition, high precision, and ease of information processing. The traditional static or online 3D shape measurement methods based on fringe projection may be hard to satisfy the demand of real-time or dynamic 3D shape measurement. With the rapid development of digital light projector (DLP) devices, digital imaging acquisition devices, and personal computers [
6,
7], many dynamic 3D shape measurement techniques have been proposed.
The existed methods for dynamic 3D shape measurement mainly contain Fourier transform profilometry (FTP) [
8,
9], single-one color fringe projection profilometry [
10], and multiple fringes phase measuring profilometry (PMP) based on high-speed projection system [
11,
12]. The FTP proposed by Takeda et al. [
13] can achieve dynamic 3D measurement [
14] because it can reconstruct 3D shape from one deformed pattern, but its measuring accuracy is probably limited due to the filtering procedure. In order to improve the measuring accuracy, the single-one color fringe projection profilometry [
15] becomes an effective method. When a color sinusoidal fringe whose red (R), green (G), and blue (B) components comprise three sinusoidal fringes with an equivalent shifting-phase of 2π/3 is projected onto the measured object [
16], the corresponding color deformed pattern modulated by the profile of the measured object can be captured by a color charge coupled device (CCD) camera. The corresponding phase-shifting deformed patterns can be retrieved simply from the R, G, and B components of the captured color deformed pattern. So the 3D shape of the measured object can be reconstructed successfully with three-step PMP. However, the color cross-talk and the grayscale imbalance problems caused by the color overlapping among the R, G, and B channels one another may lead to extracting the phase-shifting deformed patterns incompletely [
17]. Thus, some corresponding color decoupling compensation and grayscale imbalance correction methods are proposed [
18,
19,
20,
21]. Cao et al. proposed an improved RGB tricolor based fast phase measuring profilometry in which the chroma transfer function (CTF) was introduced to correct the color cross-talk and grayscale imbalance problems among R, G, and B channels [
22]. This method can reduce the effect of these problems and improve the measuring accuracy, but it may be hard to avoid these problems completely and needs additional calibration experiments. Pan et al. proposed software-based and hardware-based methods to compensate for the color coupling and grayscale imbalance errors by designing a three-CCD camera system and three color filters detect system [
20]. It worked well, the measuring system may be complicated due to the additional multiple CCD cameras and color filters. Zou et al. proposed a color fringe-projected technique based on bidimensional empirical mode decomposition to decouple to color cross-talk among color channels [
19]. It did reduce the errors caused by the color cross-talk, but its computational process may be complicated and time consuming. Although the above methods can reduce the effect of color cross-talk and grayscale imbalance problems existed in color CCD camera, these methods may be hard to solve the above problems completely and more time consuming.
In order to avoid the color cross-talk problem completely, the multiple fringes PMP based on high-speed projection system [
23] is proposed to realize dynamic 3D shape measurement. This method mainly utilized the high-speed digital light projector (HDLP) to project the
N frames of phase-shifting sinusoidal fringes onto the measured object at
N times of dynamic frame rate. The corresponding phase-shifting deformed patterns can be captured by a synchronous high frame rate monochrome camera. So the 3D shape of the measured object can be reconstructed with
N-step PMP. Zhang et al. used the single-chip DLP technology for projecting three coded sinusoidal fringes rapidly and sequentially to realize dynamic 3D shape measurement by removing the color filters onto the color wheel of the projector [
24]: the color cross-talk problem can be avoided. However, the operation may be inconvenient because the DLP needed to be reinstalled. With the development of the DLP technology, Zhu and Ma et al. solved the color cross-talk problem by utilizing a special DLP substituted for the ordinary commercial DLP and a high frame rate monochrome camera substituted for the color CCD camera to realize dynamic 3D shape measurement [
25,
26]. Although the color cross-talk problem can be avoided completely, the grayscale imbalance caused by the monochrome camera’s different sensitivity to R, G, and B light was needed additional correction. Furthermore, the sinusoidal fringe projection speed of the DLP is limited to less than 120 frames per second (fps) due to the grayscale values of the sinusoidal fringe is from 0 to 255 [
27]. In order to improve the projection speed of the DLP, the dynamic 3D measurement based on defocusing binary fringe projection [
26] is proposed. The binary fringe refresh rate of the DLP can be reach tens of kHz by using the recently developed digital light processing discovery technology [
28] due to the binary feature of the binary fringe. The sinusoidal fringe pattern can be approximated by properly defocusing the projected binary fringe [
29]. However, the binary fringe defocusing projection method needs an additional defocusing device and its measurement range may be limited by the lesser depth of field caused by defocusing, it may be difficult to calibrating the defocused projector [
30,
31].
In order to solve the above problems, a dynamic phase measuring profilometry based on tricolor binary fringe encoding combined time-division multiplexing (TDM) principle is proposed.
2. The Tricolor Binary Fringe Encoding Principle
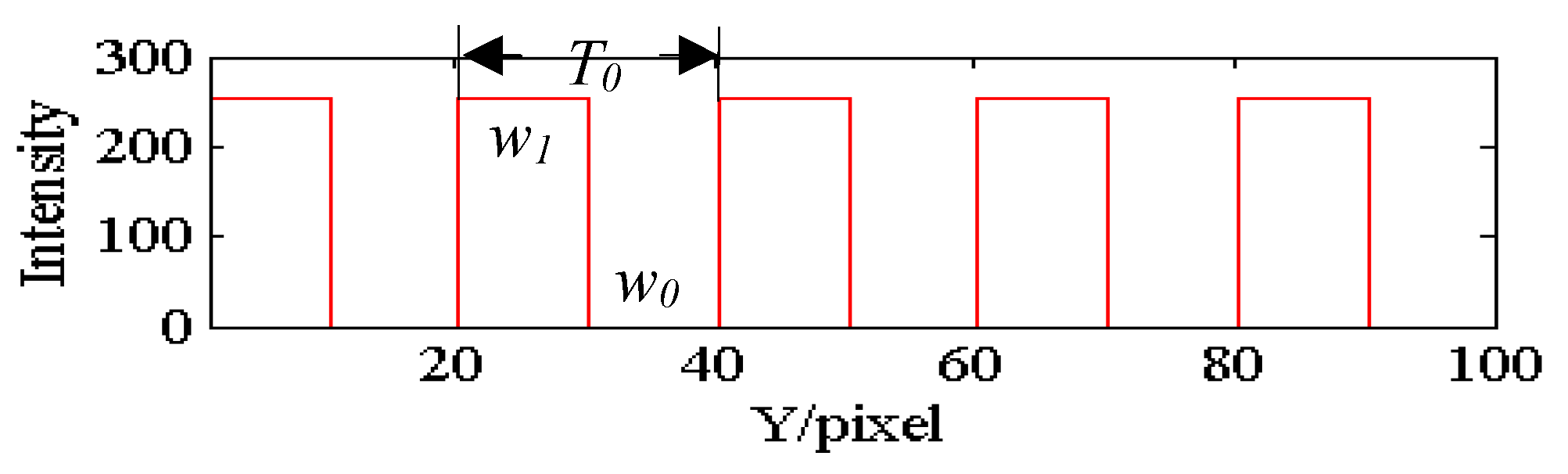
In the traditional phase measuring profilometry (PMP) based on binary fringe projection [
32], the traditional binary fringe is shown in
Figure 1. The width for non-zero transmittance (
) of the binary fringe is always encoded the same as that for zero transmittance (
) in one period (
) as shown in
Figure 1. The corresponding sinusoidal fringe pattern can be approximated by properly defocusing the binary fringe [
29] or using the nonlinear error suppression of the large-step PMP based on binary fringe projection [
30]. The duty cycle
can be expressed as
Until now, the duty cycle is always 1/2 used in PMP based on binary fringe projection. In the proposed method, this traditional barrier is broken through. A new duty cycle binary fringe is introduced that means may not be 1/2 but 1/3, meaning that the can be smaller than in one period. It is found that although the duty cycle is not 1/2 in the encoded binary fringe, its fundamental frequency components of Fourier spectrum contains the sinusoidal fringe pattern information. Just by filtering operation in spatial frequency domain, the nearly unbroken sinusoidal fringe pattern can be extracted effectively.
The introduced binary fringe can be modeled as the convolution of the rectangular window function and the comb function. Its gray value
can be expressed as
where
is a constant represented as the non-zero grayscale of the introduced binary fringe, * denotes the convolution operation. Its Fourier spectrum
can be expressed as
where
denotes the fundamental frequency of the Fourier spectrum. By introducing a proper rectangular window low-pass filter, the zero frequency component, the positive frequency component, and the negative frequency component
can be retained as
By inverse Fourier transform for
, the nearly unbroken sinusoidal fringe pattern
can be extracted as
It can be simplified as the mathematic model of PMP [
33] and expressed as:
where
, simplified as
, represents the background light intensity, and
, simplified as
, reflects the contrast of the fringe pattern.
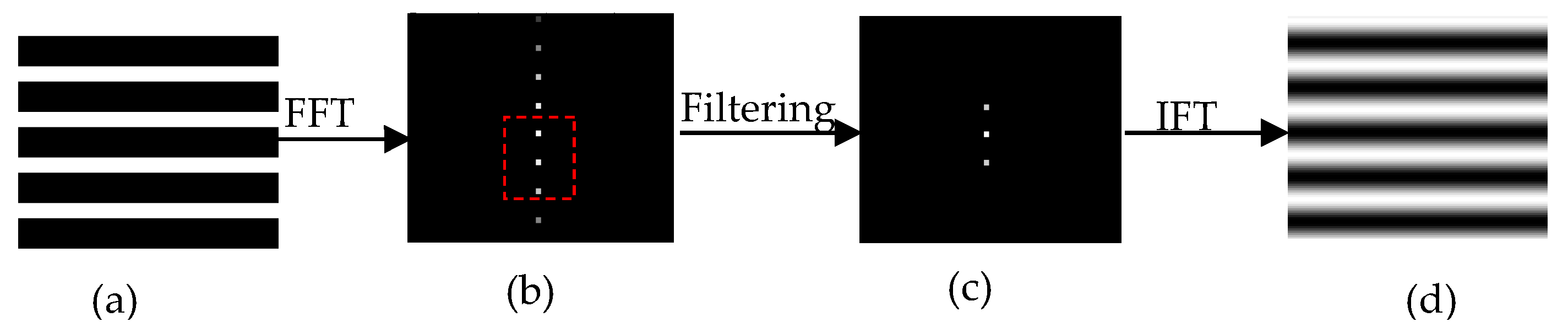
The corresponding sinusoidal fringe pattern extracting process is show in
Figure 2. When the encoded binary fringe is projected onto the reference by the HDLP, the fringe pattern is captured by a high frame rate complementary metal oxide semiconductor (CMOS) monochrome camera, as shown in
Figure 2a. By fast Fourier transform (FFT), its Fourier spectrum is shown in
Figure 2b, it can be seen that although there many higher order harmonic frequencies existed in the frequency domain, the Fourier spectrum distribution is discrete. By introducing a proper rectangular window low-pass filter, the frequency components contained the sinusoidal fringe pattern information as shown in the dotted box in
Figure 2b can be retained as shown in
Figure 2c. By inverse Fourier transform (IFT), the nearly unbroken sinusoidal fringe pattern (see
Figure 2d) can be extracted efficiently. In the same way, the nearly unbroken sinusoidal deformed pattern also can be extracted from the captured deformed pattern when the encoded binary fringe is projected onto the measured object.
Furthermore, the effects of the traditional binary fringe, and the introduced binary fringe on their Fourier spectrums, are analyzed. At the same time, the amplitudes of the Fourier spectrums in binary fringes are also analyzed, from Equation (4), the amplitude
of the fundamental frequency spectrum in binary fringe can be expressed as
The traditional 1/2 duty cycle binary fringe and the 1/3 duty cycle binary fringe as shown in
Figure 3a,b, respectively, are taken as an example. In this example, their image sizes are all 300 pixels × 300 pixels. By FFT for them, their corresponding Fourier spectrums are shown in
Figure 3c,d, respectively; it can be seen that the second order harmonic frequency spectrum vanishes in the traditional binary fringe but exists in the 1/3 duty cycle binary fringe. Although the second order harmonic frequency spectrum exists in the 1/3 duty cycle binary fringe, its proportion is small enough. It means that the shape reconstruction error caused by the second order harmonic frequency spectrum is small enough. According to Equation (7), it can also be seen that the amplitude of the fundamental frequency spectrum in traditional binary fringe is 4700 and that of the 1/3 duty cycle binary fringe is 4000 from
Figure 3c,d. But if the zero frequency spectrums and the fundamental frequency spectrums in
Figure 3c,d are filtered out respectively by introducing a proper rectangular window low-pass filter as shown in the rectangle box in
Figure 3c,d with the above-mentioned process, it can be seen that these retained frequency spectrum components’ distributions contained the sinusoidal fringe information are similar. Then they aligned the same amplitude of the fundamental frequency spectrum by simply multiplying the latter spectrum with 4700/4000, it is found that the aligned frequency spectrums are very similar to those shown in
Figure 3e. It reveals that the 1/3 duty cycle binary fringe has the same effect as the traditional binary fringe. By IFT for the aligned frequency spectrums in
Figure 3e respectively, the corresponding nearly unbroken sinusoidal fringe patterns can be efficiently extracted from the traditional binary fringe and the 1/3 duty cycle binary fringe respectively.
Figure 3f show the cutaway views of the extracted sinusoidal fringe patterns in one columns, it can be seen that the transmittance function of the sinusoidal fringe pattern extracted from the 1/3 duty cycle binary fringe is much close to that of the traditional binary fringe. Furthermore, it also reveals that the reconstructed phase information of the measured object by using the 1/3 duty cycle binary fringe can be close to that of traditional binary fringe.
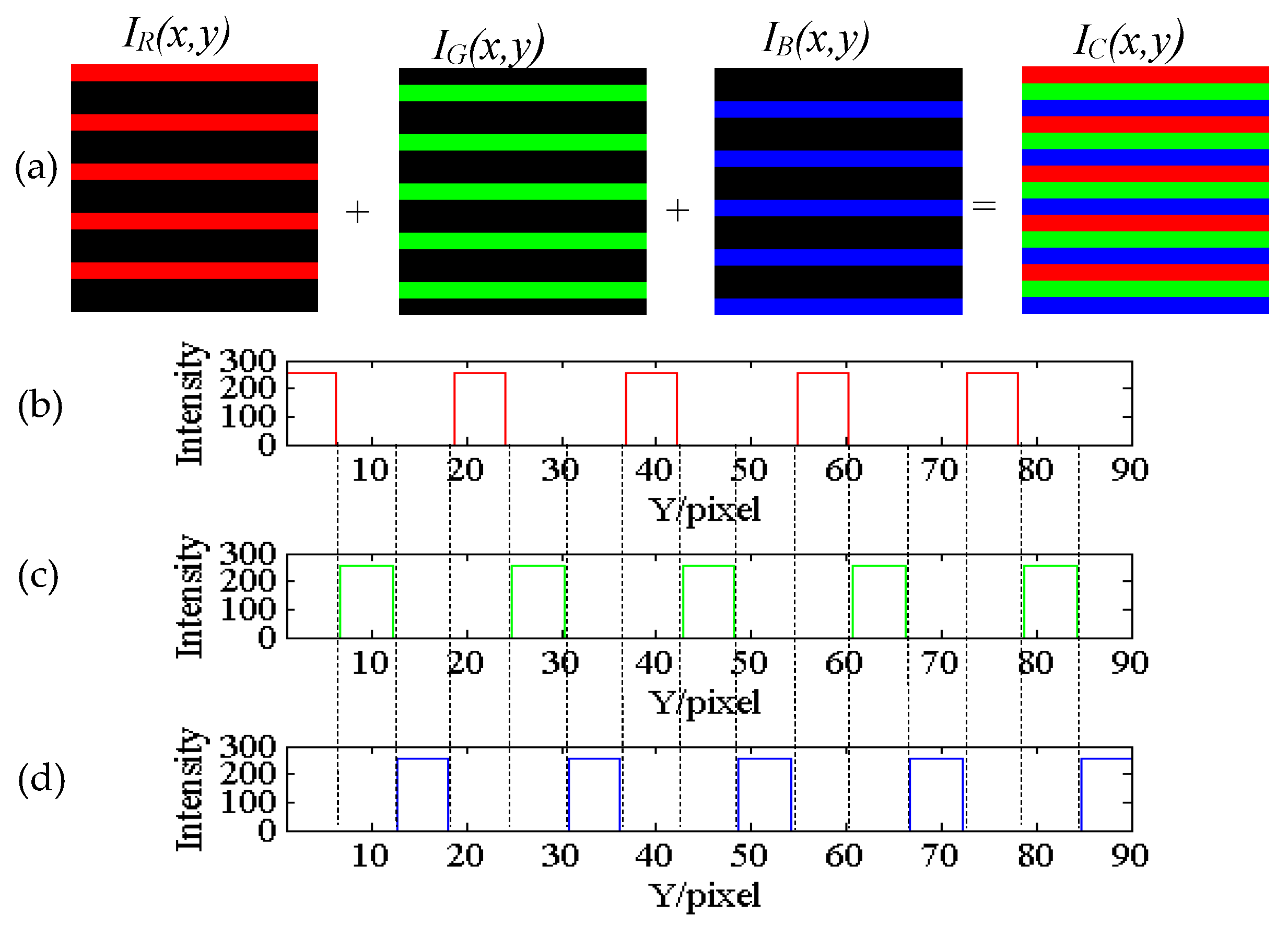
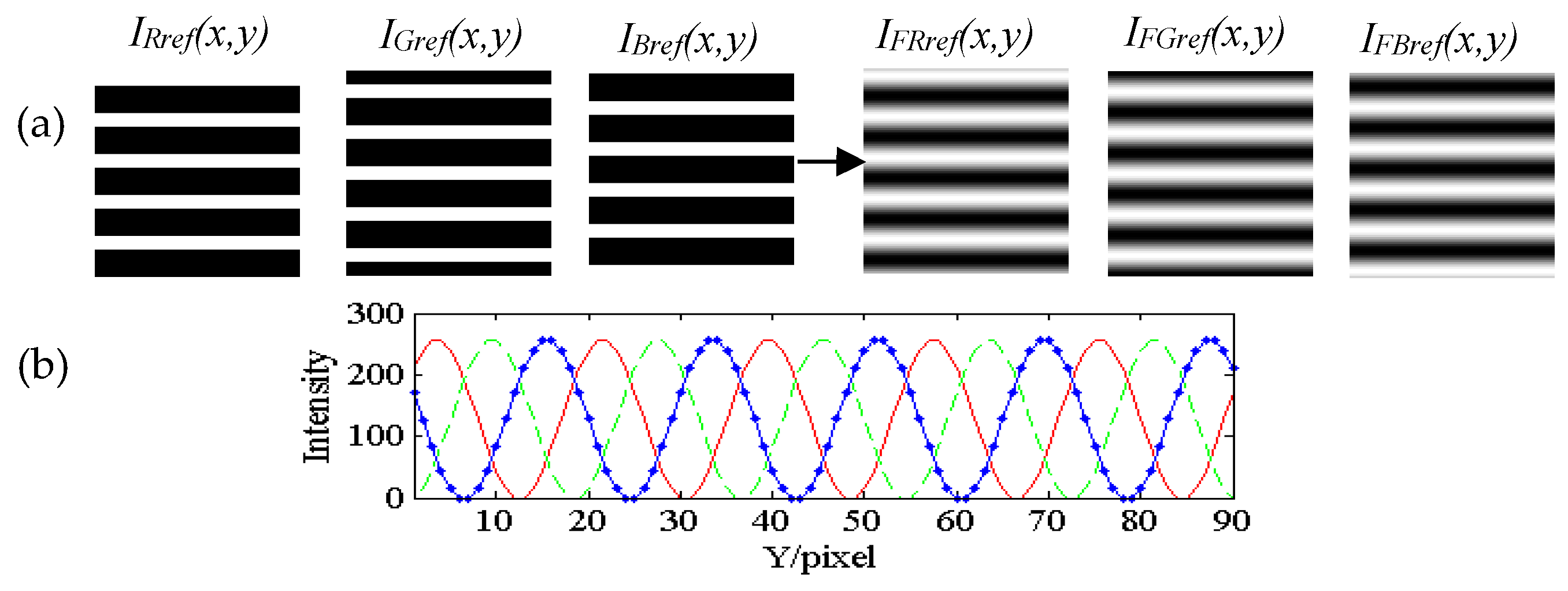
In order to realize dynamic 3D shape measurement with the introduced binary fringe, a tricolor binary fringe is designed as shown in
Figure 4a in which its R, G, and B components are encoded by three monochromatic binary fringes with the same duty cycle of 1/3 but shifted 1/3 period one by one. It can be seen that R, G and B components of the encoded tricolor binary fringe share the same fringe width of 1/3 periods and are independent without any color overlapping in the non-zero regions one by one as shown in
Figure 4b–d, so the encoded tricolor binary fringe can avoid the color overlapping problem in the traditional composite color sinusoidal fringe. The mathematic model of the tricolor binary fringe
can be expressed as
where
,
, and
denote the grayscale distributions of the R, G, and B components in the tricolor binary fringe:
3. The Dynamic PMP Principle Based on the Tricolor Binary Fringe
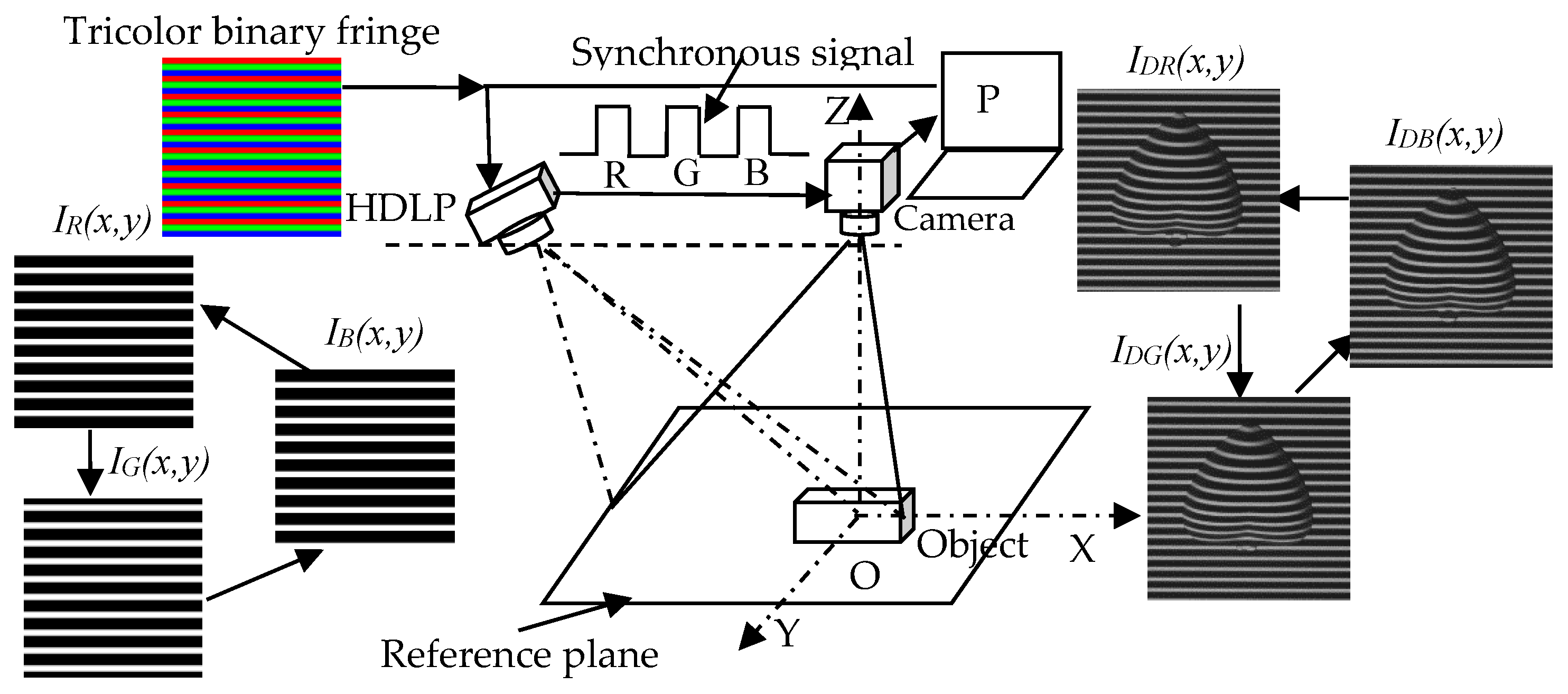
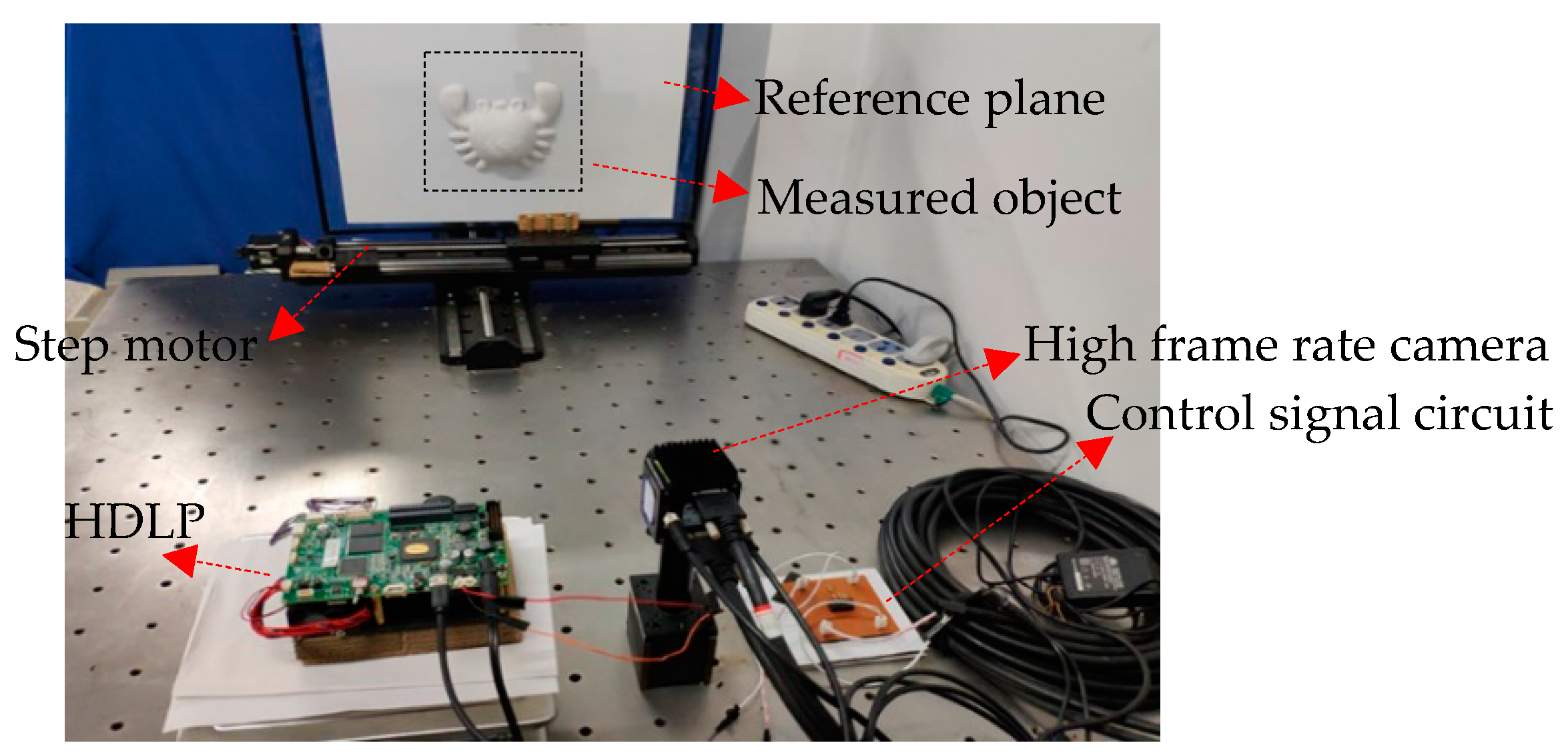
The schematic diagram of the dynamic PMP principle based on the proposed tricolor binary fringe is shown in
Figure 5. Before measuring, the proposed tricolor binary fringe is encoded and saved into the flash memory of the HDLP in advance. Under the control of a special time-division multiplexing (TMD) timing sequence, the HDLP projects the encoded tricolor binary fringe saved in the flash memory with its R, G, and B channels (
,
, and
) onto the reference plane separately and sequentially. At the same time, the projected light source mode was set as monochrome mode which means that all the RGB LEDs remain lighting mode, so that every frame binary fringe could be projected as a grayscale fringe, effectively avoiding the grayscale imbalance problem caused by the monochrome camera’s different sensitivity to the R, G, and B light. Meanwhile, a high frame rate monochrome CMOS camera synchronized with the HDLP was used to capture the corresponding three fringe patterns
,
, and
from R, G, and B channels, as shown in
Figure 6a. The filtering operation is as discussed in
Section 2, the corresponding extracted three nearly unbroken sinusoidal fringe patterns—
,
, and
—can be obtained as shown in
Figure 6a. Their cutaway views of the three extracted sinusoidal fringe patterns are shown in
Figure 6b, it can be seen that the three extracted sinusoidal fringe patterns have an equivalent shifting-phase of 2π/3 one another. According to the calculation process of Equations (2)–(6), they can be expressed as
where
denotes the period of the captured fringe pattern.
denotes the phase caused by the reference plane, it can be expressed as
As
is wrapped in
due to the arctan function it should be unwrapped to be
by a phase unwrapping algorithm [
34] and saved in the computer in advance.
While measuring, under the same condition above-mentioned, the HDLP projects the encoded tricolor binary fringe in R, G, and B channels (
,
, and
) onto the measured object separately and sequentially at three times of dynamic frame rate, the corresponding three deformed patterns (
,
, and
) from R, G, and B channels can be captured by the high frame rate CMOS monochrome camera synchronized with the HDLP as shown in
Figure 5. In the same way as discussed in
Section 2, the captured three deformed patterns—
,
, and
—which were processed the corresponding extracted nearly unbroken sinusoidal deformed patterns
,
, and
can be expressed as
where
is the phase modulated by the measured object located the reference plane; it can also be expressed as
It also should be unwrapped to
. The phase
, which s modulated by the height of the measured object, is the difference
and
.
can be expressed as
So the 3D shape of the measured object is reconstructed by phase-to-height mapping relationship [
35] as
where the system constants
,
, and
can be calibrated by several planes with known heights. Furthermore, due to the phase of the binary fringe will be slightly changed during the FFT process, it may introduce a phase error. However, this phase error is the system phase error, it can be eliminated by the three-step PMP algorithm used in the proposed method.
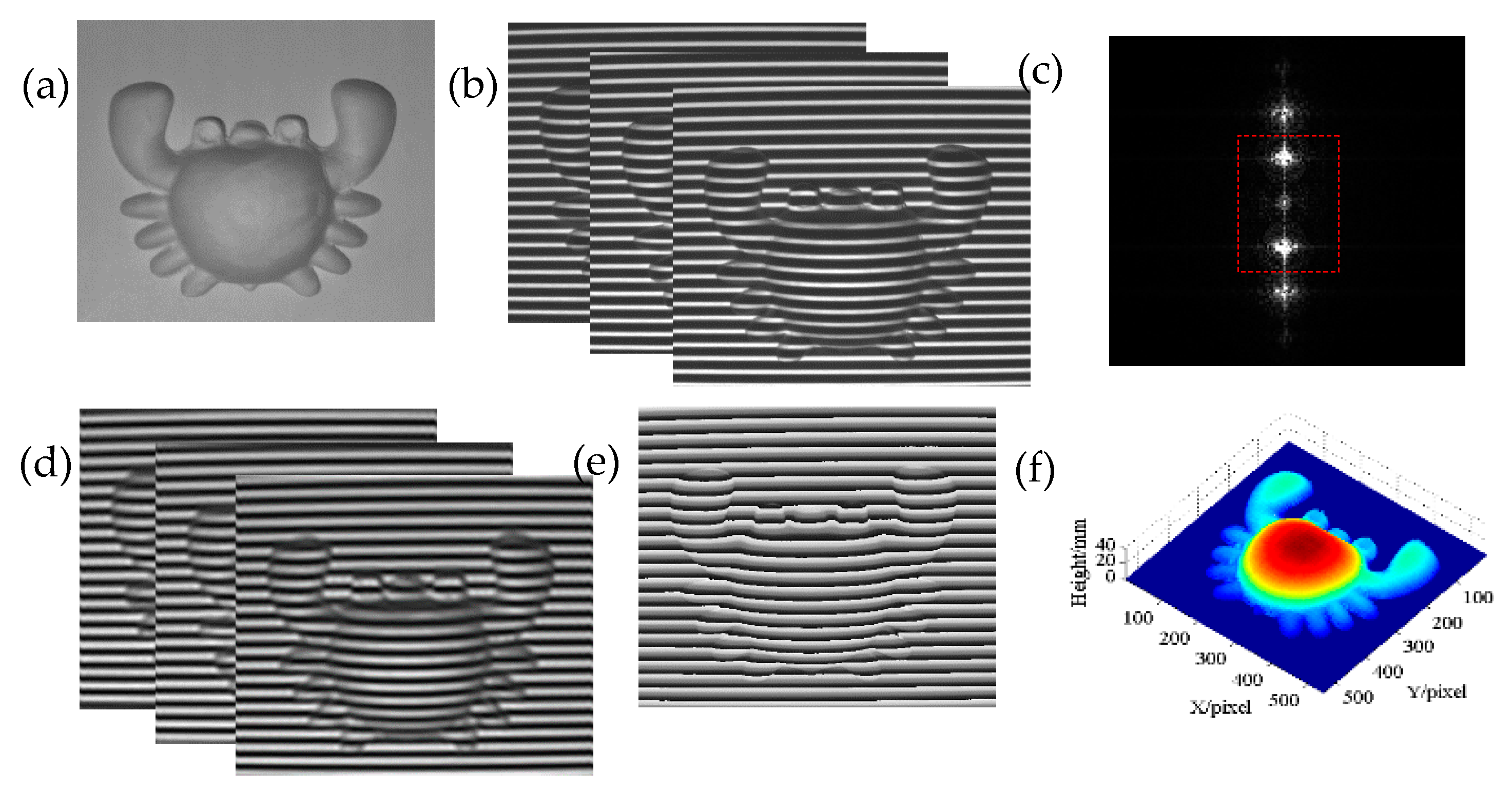
The corresponding reconstruction process of the proposed method is shown in
Figure 7. The captured three deformed patterns,
,
, and
, from R, G, and B channels were processed as outlined in the above-mentioned process. By FFT, their Fourier spectrums (R spectrum, G spectrum, and B spectrum) are shown in
Figure 7. After proper filtering, their zero frequency components and the fundamental frequency components as shown in the dotted rectangle regions are extracted respectively. By IFT, the corresponding three nearly unbroken sinusoidal deformed patterns with an equivalent shifting-phase of 2π/3 one another can be retrieved successfully. The wrapped phase modulated by the measured object can be calculated with the three deformed patterns combined three-step PMP and the 3D shape of the measured object can be reconstructed successfully as above-mentioned method. Due to the binary feature of the encoded binary fringe, the projection fringe refresh rate of the HDLP can be improved greatly, so the proposed method can be used to reconstruct the 3D shapes of the real-time changing or dynamic object.
The specialized TDM timing sequence is designed as shown in
Figure 8. It can be generated by a microcontroller signal circuit which can actively control the HDLP and the high frame rate CMOS monochrome camera synchronously [
36] in our research group. The frame rate of the HDLP for a 1-bit image can be 4225 fps while that of the high frame rate CMOS monochrome camera can be reach 337 fps. When the synchronized microcontroller signal is at the rising edge of the projector trigger signal, the binary fringe data
saved in the memory of the HDLP is output and completely projected onto the real-time changing or dynamic object by the HDLP at 1/500s with its monochrome light projection mode, the corresponding high frame rate CMOS monochrome camera synchronized with the HDLP starts to integrate at the rising edge of the camera trigger signal until it completes the process of capturing the current deformed pattern from R channel and the corresponding deformed pattern was
is effectively saved into the personal computer (PC) by the universal serial bus in one period (1/234s). Then the HDLP refreshes its digital micromirror device (DMD) and starts projecting the next two binary fringes
and
in the next two periods, respectively, with the above projection process, the corresponding two deformed patterns (
and
) from G and B channel can be captured and saved into the PC. Circularly, under the active control of the synchronized microcontroller signal, the three fringes (
,
, and
) of the encoded tricolor binary fringe were projected onto the measured real-time changing or dynamic object at 234 fps and the corresponding three deformed patterns (
,
, and
) were captured synchronously. So the corresponding each group of the deformed patterns of the measured real-time changing or dynamic objects in different states can be captured at 78 fps. It is guaranteed that the sufficient 3D shape information of dynamic objects can be obtained at 78 fps with the proposed method. Furthermore, the color cross-talk problem can be avoided completely because the R, G, and B components of the encoded tricolor binary fringe are projected at different times.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}