1. Introduction
A class of materials, which are relevant from the point of view of advanced applications, is represented by the so-called soft or highly deformable materials, such as elastomeric polymers, colloids, liquid-crystals polymers, gels, foams, as well as biological materials—such as soft tissues—that are roughly governed by the same mechanical principles [
1]. Typically, these materials have mechanical properties falling within the following range; elastic modulus of 0.1–1.5 MPa, tensile strengths of 1–10 MPa, ultimate tensile strains up to 2000%, and fracture energy of 100–1000 J/m
2. Soft materials are endowed with unique features and mechanical properties, explaining the great attention that they have been receiving from the scientific community in the last decades. In natural systems, soft tissues are a fertile source of inspiration for advanced applications, with mechanics and biology going hand-in-hand to formulate the underlying mechanical principles and develop new optimized structural materials [
2,
3,
4,
5,
6].
The peculiar properties exhibited by soft materials are a direct consequence of their complex and entangled molecular structure, which involves millions or billions of atoms forming linear chains. We owe the fundamentals of the chemical- and physics-based mechanical behavior of this class of materials to the research work of Paul J. Flory and P.J. De Gennes [
7,
8,
9]. In fully amorphous materials, the structure at the nanoscale level consists of a three-dimensional network of polymer chains, linked together at several discrete points identified as cross-links. The mechanical response of these materials at the meso- or macroscale is heavily affected by the amount of entanglement and the number of existing cross-links per unit volume, rather than by the bonding strength existing between the atoms, as happens in fully crystalline materials (e.g., metals, ceramics, etc.). Upon the application of load, the deformation induces an alignment and unentanglement of the polymeric chains, with the initial amorphous conformation turned into a semicrystalline-like one. Such a phenomenon usually occurs at quite large deformation, thanks to the highly-oriented arrangement of the chains along the tensile direction [
10,
11,
12]. This so-called strain-induced crystallization is responsible for the typical stiffening behavior which is noticed in the stress–strain curve of polymers at high strain levels [
13,
14].
Soft materials normally can deform several times their original length, without being damaged or ruptured. If macroscopic flaws are introduced in the form of cuts, cracks or notches, the stretchability can be affected in different measure, depending on the flaw sensitivity of the material. The concept of a material length scale, separating flaw-sensitive from flaw-insensitive rupture, has been initially proposed for hard materials [
15] and later extended to soft polymers [
16]. Differently from traditional crystalline solids, rupture of soft polymers occurs at large deformation, when the rearrangement of the polymeric chains leads to flaw reshaping and strengthening around the highest strained region. In particular, an existing initial sharp crack blunts significantly before propagation, with the effect of relieving the strain concentration around the tip [
17,
18,
19]. The resulting feature is an enhanced defect tolerance, with some tough soft materials showing an insensitivity to flaws up to a few millimeters long, in contrast to the typical nanometer scale for hard brittle solids [
20]. For instance, biological tissues such as skin are known for their extreme resistance to flaws, which makes virtually impossible to propagate tearing in a stretched sample. Experimental observations on rabbit skin showed that a small notch does not propagate but progressively blunts, due to straightening and stretching of the collagen fibers [
21]. However, other soft materials, such as the so-called hydrogels, are often prone to premature fracture and have low fatigue resistance. In such materials, the rupture process is strongly influenced by the fluid interaction [
22], and it has been discovered that increased toughness and fatigue resistance are obtained through the development of polymer networks containing chains of different lengths (such as the double-network hydrogels, containing both a short- and a long-chain highly stretchable network). In this fashion, the shortest chains act as sacrificial elements, while the longer ones provide the material with a further elastic behavior [
23,
24]. From this perspective, it appears that the polymer network characteristics play a crucial role in defining the macroscopic behavior of the material. Furthermore, soft materials are sensible to time-dependent effects, with the fracture energy depending on the rate of application of the external loads, because of the viscous energy dissipation occurring in the crack tip region [
25,
26,
27]. Sometimes, under a constant applied load, a so-called delayed fracture has been observed, depending on the network structure of the soft matter [
28].
In this work we present a comprehensive investigation into the defect tolerance of flawed specimens of rubber-like polymers, with a detailed summary of experimental findings recently published by the authors [
29,
30,
31]. Various configurations with cracks and notches are examined in order to evaluate the macroscopic mechanical response in relation to the flaw severity. Moreover, the effect of the applied strain rate is taken into account phenomenologically. All the experimental tests are conducted under strain control, and the kinematically-related quantities are measured through a contactless Digital Image Correlation (DIC) technique. Due to the local high deformations in proximity of the defects, a severe defect remodeling with evident blunting is noticed. The main purpose is to show how crack blunting affects the rupture behavior of soft materials. Through a simplified analytical model, the increase in the curvature radius at the notch root with the remote applied load is described. Such a model is applied to the experimental results, putting into evidence that it is the blunting effect which controls the rupture process; in particular, the grade of blunting appears to determine the transition from the typical small-scale yielding failure to rupture at a constant theoretical strength.
The paper is organized as follows.
Section 2 presents a collection of the results obtained from the experiments, with details on the materials and methods employed. Accurate images taken from the DIC elaboration are included. In
Section 3, a detailed discussion is developed in order to give a comprehensive interpretation of the experiments, with specific reference to the notch blunting effect, which is computed through a simplified analytical model. Finally,
Section 4 sets out the conclusions.
2. Experimental Tests on Macroscopically Flawed Thin Plates
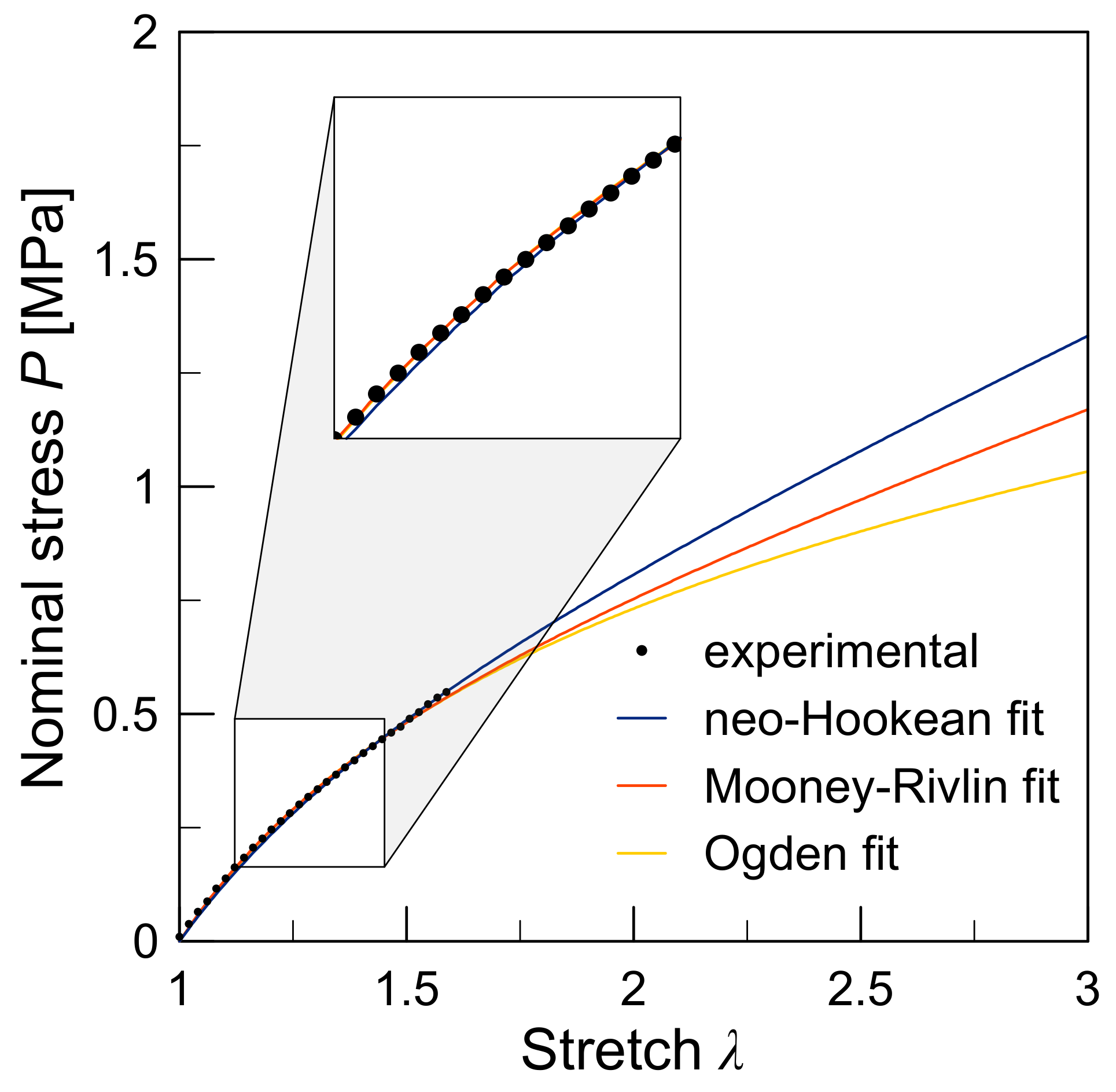
In this section, we present the results of tensile tests on thin plates made of various elastomeric polymers, carried out under displacement control up to complete failure. The plates contain flaws with different geometrical features, ranging from cracks to notches, denoted here as geometric discontinuities with a finite radius of curvature. Rubber-like polymers have been chosen because their behavior is highly representative of a vast range of soft materials. For instance, silicone rubber is often employed as a substitute of human skin, since it does not show the strain-induced stiffening of natural rubbers, maintaining comparable values of tensile and tearing strength [
32]. The stress–strain curves obtained from tensile testing of silicone rubbers are typical of a hyperelastic, almost incompressible behavior. Several models have been proposed [
33], which usually show good agreement at low to moderate stretches (generally below 1.5). During our experiments we have found that the one-parameter neo-Hookean model offers a satisfactory approximation in the stretch range of interest (see, for instance,
Figure 1).
The purpose of the experiments herein described is to evaluate the effect of initial flaws on the tensile strength of the material, considering both the effect of the flaw size and of the applied strain rate. The response of the specimens during the experimental tests is monitored by measuring the applied force and corresponding displacements, and by using the Digital Image Correlation (DIC) technique. The DIC is a contactless technique widely used to get full-field displacement and strain maps in experiments, through numerical reconstruction of the kinematic field shown by the surface points of the samples. For an optimal use of such a technique, the surface of the specimens needs to be covered with speckle patterns before testing. Several parameters affect measurement accuracy and spatial resolution, included optical measures connected to the camera and lens resolution, image magnification, mean size of the speckle pattern, and factors depending on the correlation algorithm, such as the image subset size and the gray-level interpolation. In particular, the resolution of the displacement measurement is governed by the subset size, whose lower bound is limited by the speckle size and, consequently, by the available pixels [
34,
35]. In the present work, the images are acquired with a high-resolution digital camera (maximum resolution of 5184 × 3456 pixels) mounted on a tripod, and lights are used to ensure a uniform illumination of the samples. The sequence of images is treated by means of the freeware software Ncorr [
36], developed in MATLAB environment, for monitoring the displacement and the strain fields within the specimen.
2.1. Plates Containing Elliptical Flaws
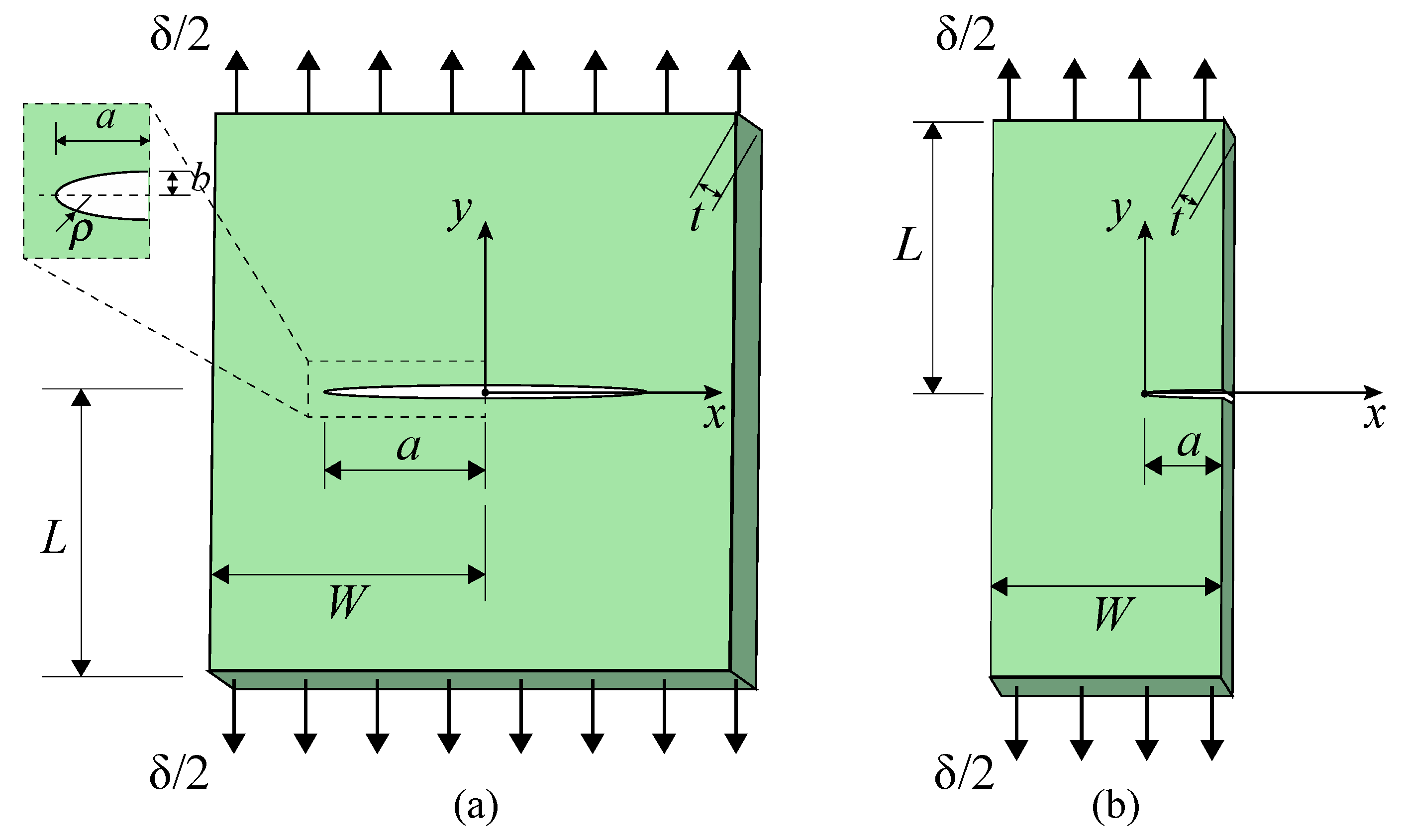
The first set of experiments is carried out on elastomeric sheets under tension, containing elliptical flaws of length 2
a, characterized by a finite notch root radius (
Figure 2a). The plates are made of Sylgard
®, a common silicone polymer having the following elastic parameters: initial Young modulus
E = 0.84 MPa and Poisson ratio
ν = 0.37. Three types of specimens have been prepared, containing a centered elliptical flaw with different values of the root radius
ρ and same length 2
a. The plate aspect ratio is kept constant at
L/W ≈ 2. The geometric characteristics of the specimens are reported in
Table 1. The flawed plates are subjected to tensile loading along the
y-axis, applied at a constant strain rate of
. The tests have been interrupted before failure, since an evident notch remodeling was noticed. The response during the experimental tests is monitored by means of the DIC technique.
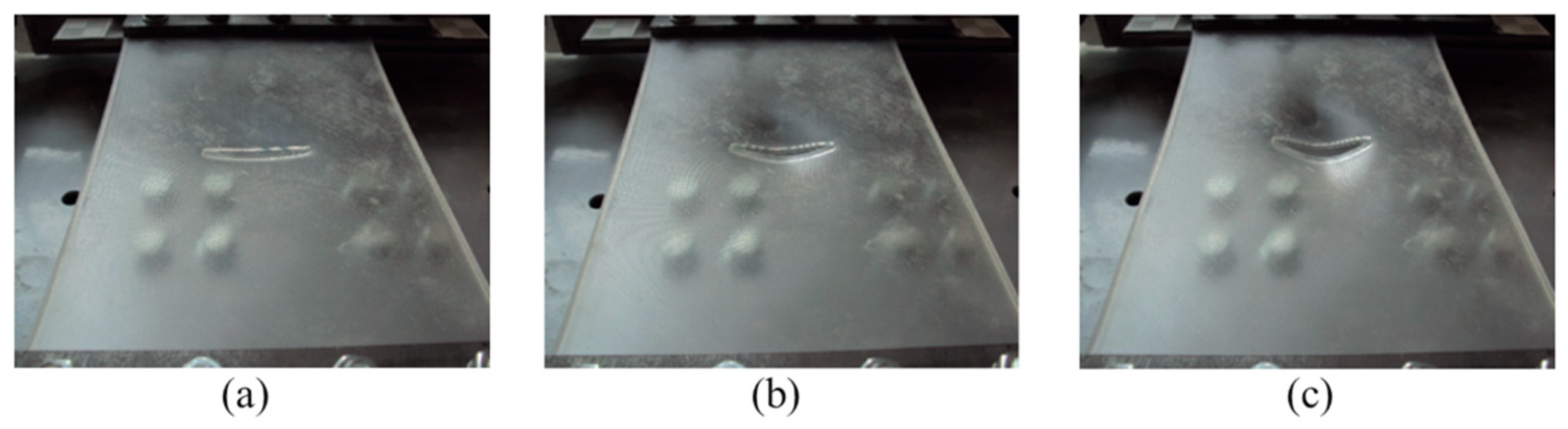
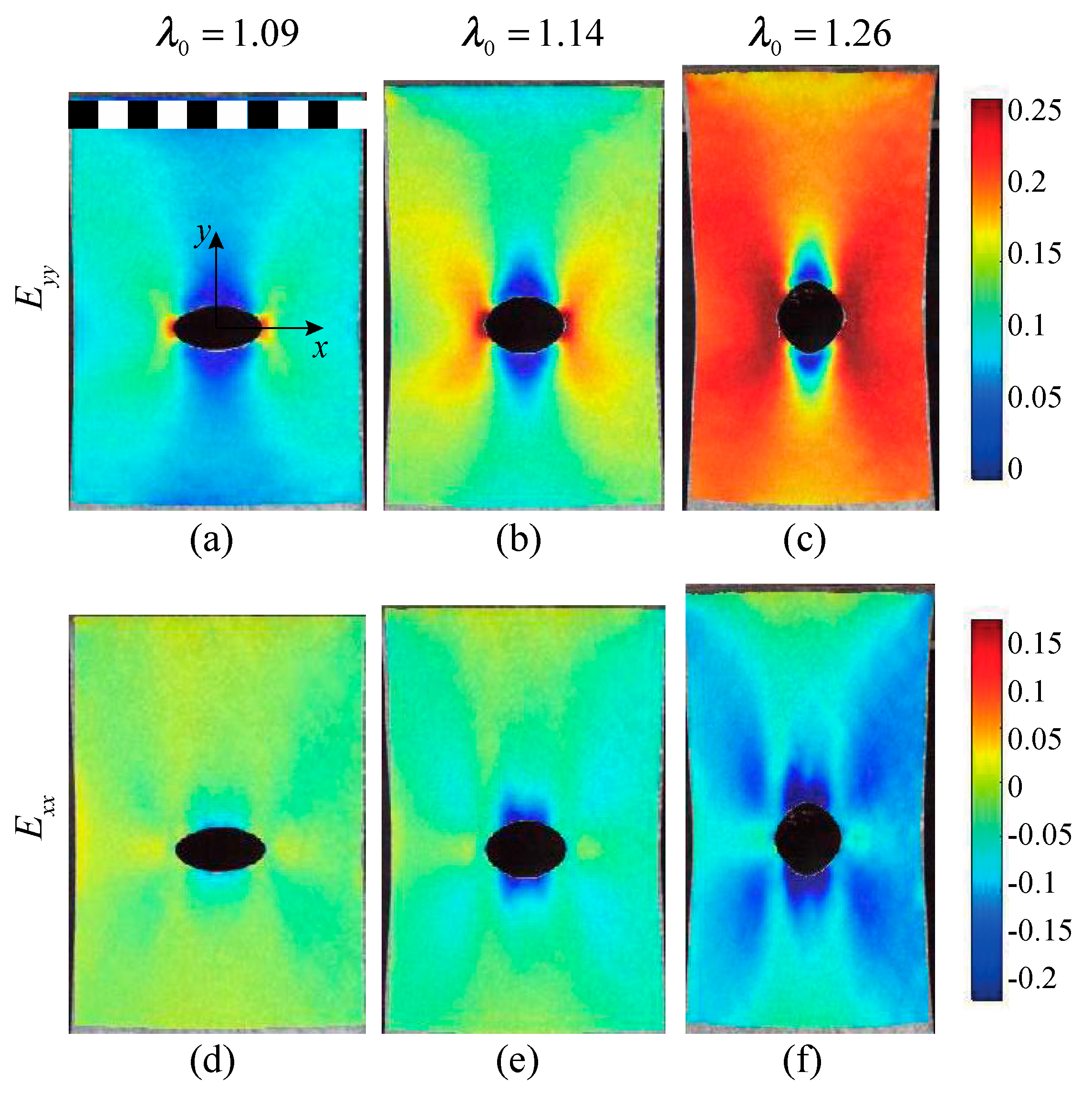
Figure 3 shows the initial (undeformed) and the generic stretched shapes of the specimen El1 at two increasing levels of the remote applied stretch. The corresponding strain patterns obtained from the DIC analysis are illustrated in
Figure 4, specifically, the Green–Lagrange strain
Eyy parallel to the loading direction and the strain
Exx transversal to such a direction. Three different levels of the applied remote stretch are considered, defined as
where
δ is the applied displacement.
The DIC plots show that the material is able to comply with very high deformations, leading to a severe defect remodeling characterized by an evident blunting of the notch. A compressed region just in front and behind the elliptical hole is observed, due to the contraction effect arising in the direction normal to the applied load (see also
Figure 3c). This phenomenon has a beneficial effect in terms of the strain concentration, with a sort of augmented notch blunting due to the local flexural instability of the thin plates in the compressed zones [
29].
2.2. Plates Containing Internal Crack-Like Flaws
A second set of experiments deals with plates containing a centered crack of length 2
a (
Figure 2a with
b =
). The samples are made of a commercial silicone rubber (TSE3478T by Momentive). The desired crack is obtained by manually cutting the samples with a sharp blade. From tensile tests on sound specimens, the initial Young modulus of the material is found approximately equal to
E = 1.12 MPa and the Poisson ratio to
ν = 0.42. Four series of specimens containing a centered crack are here considered, characterized by different values of the relative crack length
a/W, whereas the plate aspect ratio is kept constant at
L/W ≈ 2. The geometric characteristics of the specimens are reported in
Table 2. The plates are subjected to tensile loading along the
y-axis up to failure, applied at a constant strain rate of
. The response during the experimental tests is monitored by means of the DIC technique.
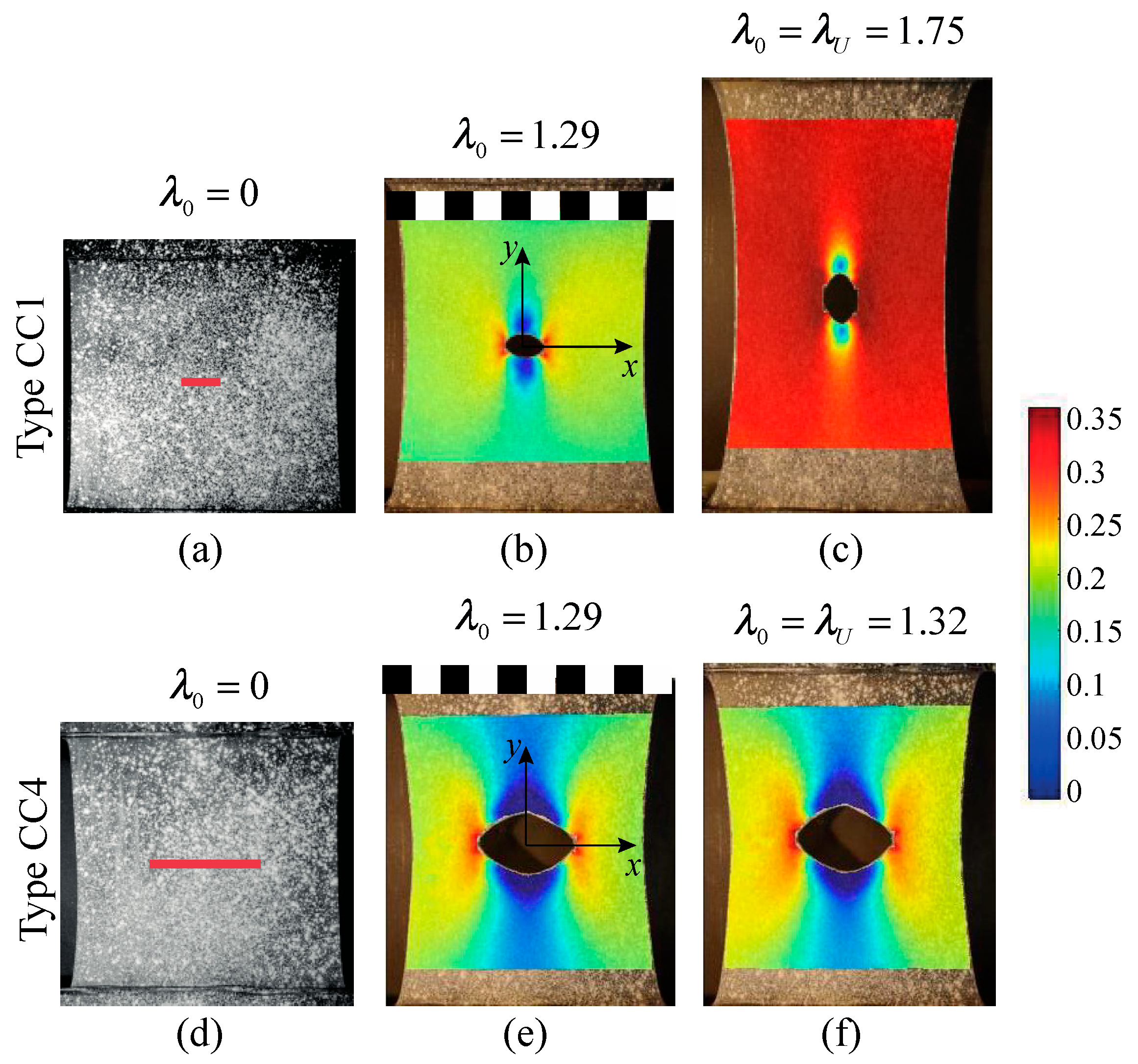
Figure 5 shows the deformed patterns of the specimens, for three different stages of the applied loading: at the beginning of the test (undeformed, left column), at an intermediate stage (remote stretch
, central column), and at the final stage before failure (ultimate remote stretch, right column). The strain patterns obtained from the DIC analyses are also shown, specifically, the Green–Lagrange strain
Eyy (parallel to the loading direction) at the intermediate and the ultimate stages. It can be noticed that the initial crack-like shape tends to blunt under loading and the applied ultimate stretch generally decreases for an increasing relative crack size
a/W. At the intermediate stage, the DIC maps clearly show a strain concentration typical of an elliptical notch, where the maximum strain values occur in the locations corresponding to the original crack tips. At incipient failure, the strain maps exhibit a complex distribution due to the failure mechanisms developing in the vicinity of the notch roots. It is worth noticing that out-of-plane displacements occur in two limited regions close to the crack edges (the blue regions in
Figure 5), because of the contraction effect arising in the direction normal to the applied load, i.e., in the
x-direction.
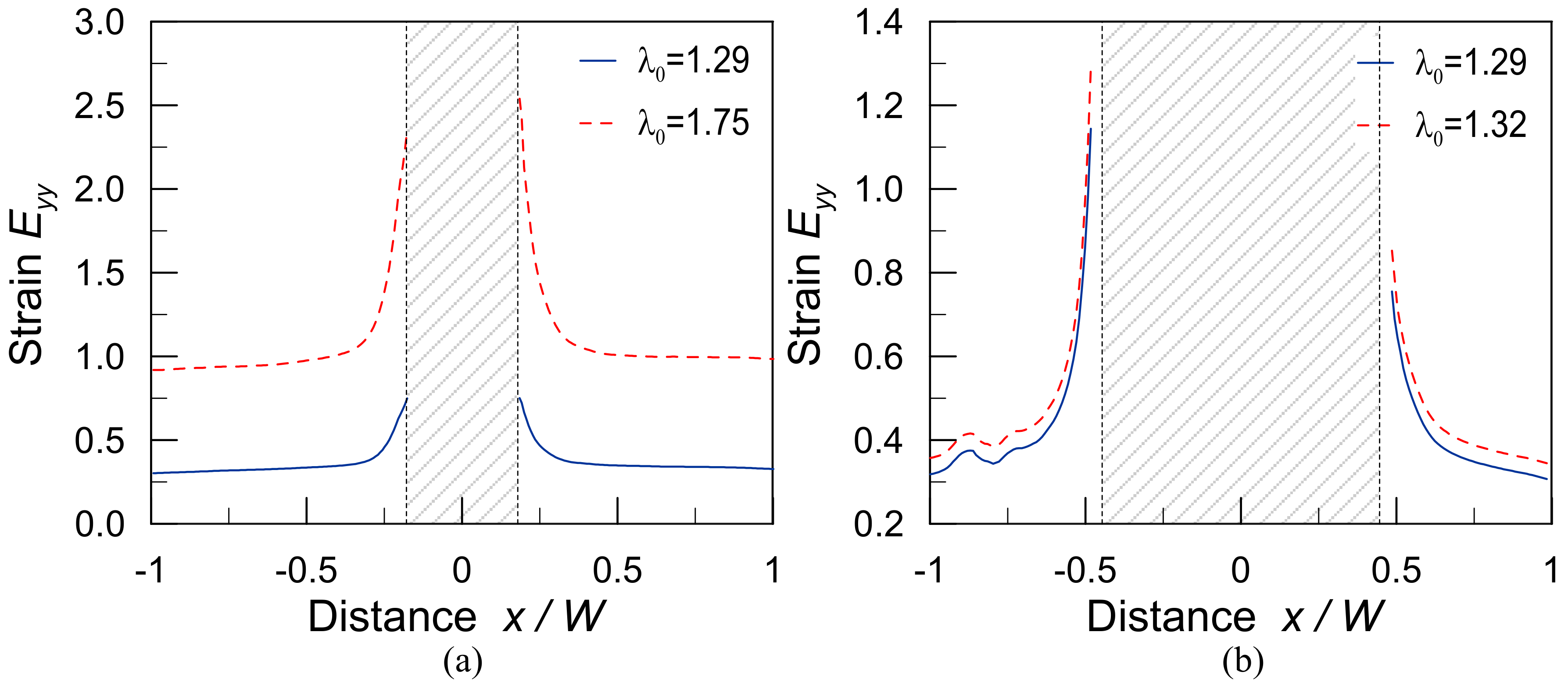
The distribution of the Green–Lagrange strain
Eyy along the
x-axis is shown in
Figure 6.
2.3. Plates Containing Edge Crack-Like Flaws
The last set of experiments that we review is related to plates containing edge crack-like defects (
Figure 2b), where we consider the effects of the relative crack size
and of the applied strain rate. A first group of edge-cracked plates (specimens EC1–EC4 in
Table 3) has been prepared with the commercial silicone RTV 615 (Elantas Europe Srl). From tensile tests on sound specimens, the initial Young modulus of the material is equal to
E = 1.50 MPa and the Poisson ratio is equal to
ν = 0.42. The plates are subjected to tensile loading along the
y-axis up to failure, applied with three different strain rates:
,
, and
. The response during the experimental tests is monitored by means of the DIC technique.
A second group of edge-cracked plates (EC5-EC8 in
Table 3) has been prepared using a different silicone rubber (Elite Double 32 by Zhermack Dental), with an estimated Young modulus equal to
E = 1.36 MPa and the Poisson ratio is equal to
ν = 0.42. The plates are subjected to tensile loading along the
y-axis up to failure; such a loading is applied with a strain rate
. Four series of specimens have been prepared for each group, with different values of the relative crack length
, while the plate aspect ratio is kept constant at
L/W ≈ 1.5.
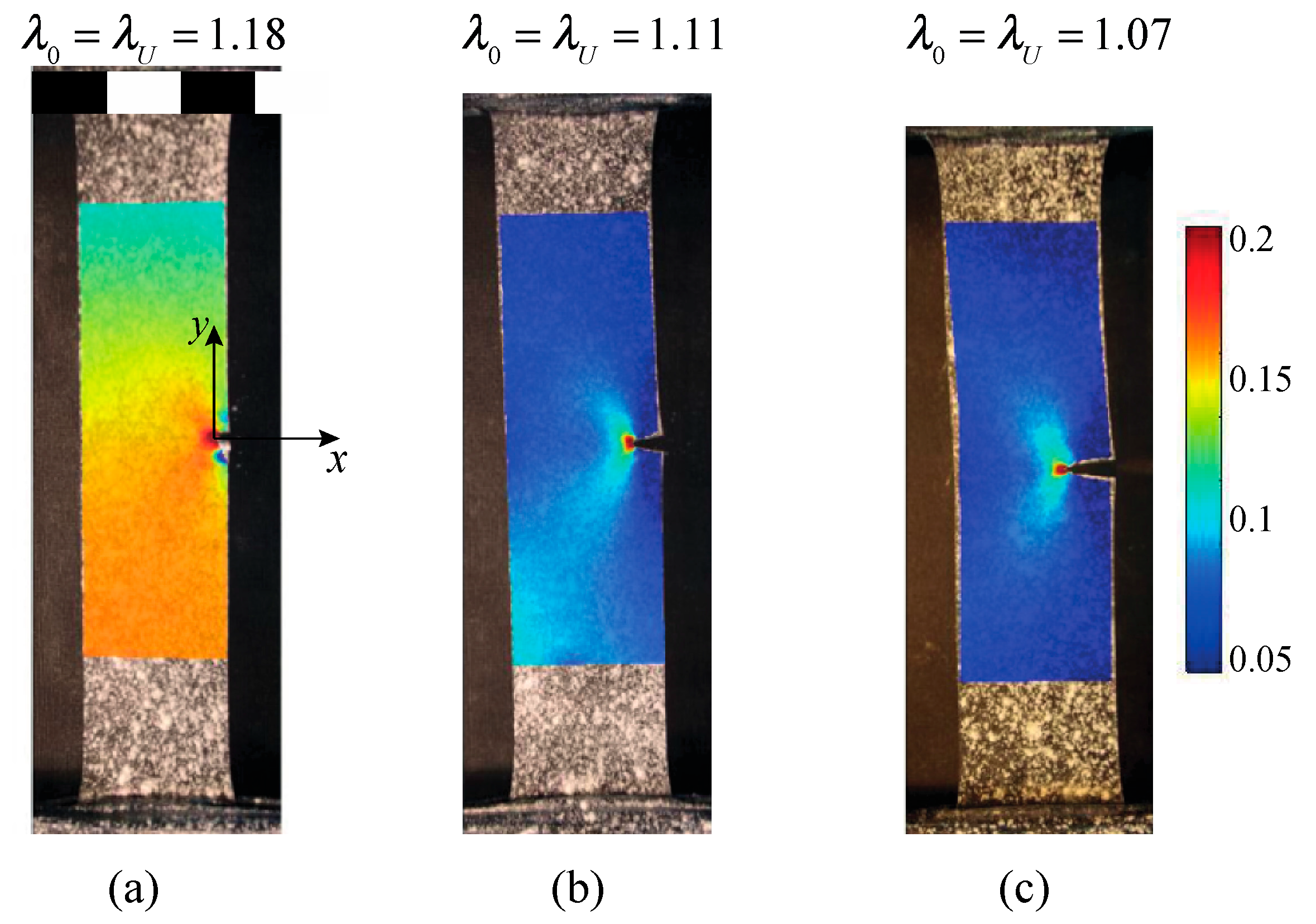
The results obtained from the DIC analyses in the specimens EC2–EC4 are illustrated in
Figure 7, specifically, the Green–Lagrange strain
Eyy (parallel to the loading direction) at incipient failure for the highest strain rate among the three considered. From a qualitative observation, it can be noticed that crack tip blunting is limited (compared, for instance, to the case of an internal crack in
Figure 5).
The results show that specimens with only one ligament zone are more sensible to defects with respect to the ones containing a central crack (CC1–CC4). The eccentric load effect, which increases with the deformation, plays a crucial role in intensifying the stress close to the crack tip, leading to a premature failure of the polymer network chains within the crack process region.
2.4. Effects of Intrinsic Material Defects
The group of experiments on edge-cracked plates has also involved samples with intrinsic defects, in the form of microvoids (D1–D4 in
Table 4). For this purpose, we have prepared samples with the same material and sizes of the group EC1–EC4, but following a different treatment during the preparation of the silicone mixture. To prepare the samples, 50 g of component A (matrix) are thoroughly mixed with 5 g of component B (curing agent). At this point, the mixture for the material without defects is carefully degassed in vacuo and subsequently mechanically spread into the custom-made aluminum mold. This stage is followed by a second degassing, then the mixture is cured in oven at 60 °C overnight and finally mechanically removed from the mold. In order to obtain microbubbles embedded in the material, the silicone mixture is directly cured in oven without the degassing stages.
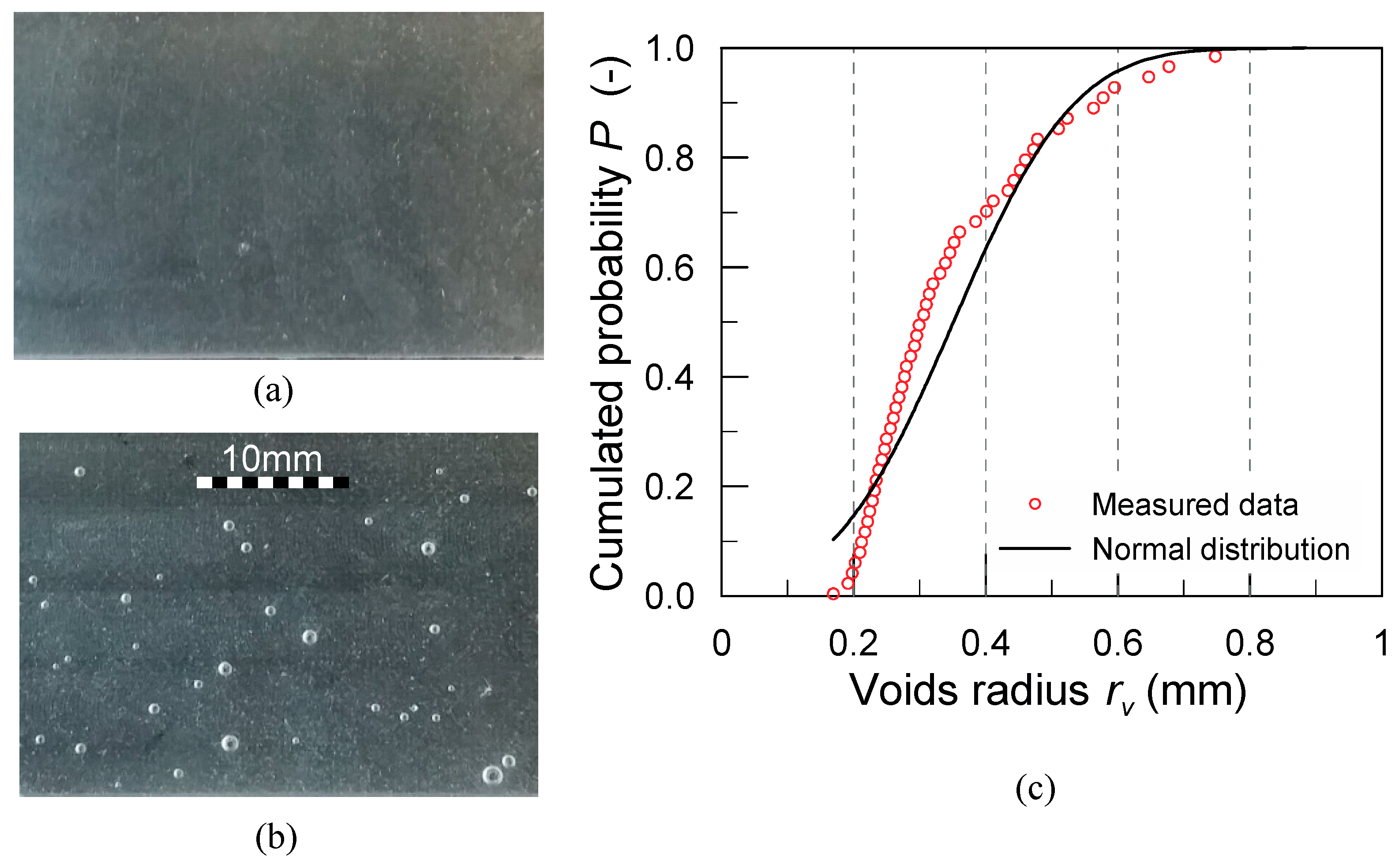
A comparison of the materials, with and without the microvoids, is shown in
Figure 8a,b. The average void radius is equal to
rv = 0.35 mm, and its distribution is described by adopting a normal probability function (variance equal to 0.021 mm
2). The plot of the probability function (
Figure 8c) shows a good agreement with the measured distribution, and ~80% of the voids have a radius within half of the smallest edge crack length considered.
Figure 9 illustrates the failure behavior of edge-cracked specimens EC1–EC4 and D1–D4, in terms of the ultimate stretch vs the relative crack size. As was expected, smaller ultimate stretches are attained for increasing values of the relative crack size
a/W. The decreasing trend, with a roughly quadratic pattern, confirms that the material is sensitive to the presence of the initial flaws.
The effect of the strain rate is investigated in
Figure 9a. The highest strain rate provides the highest ultimate stretch, although the effect tends to reduce at lower ultimate stretches, suggesting that the influence of flaw size on the ultimate stretch decreases if the deformation is applied sufficiently slow.
Figure 9b compares the failure in specimens with and without intrinsic material defects. It can be inferred that microdefects tend to anticipate failure, although the results are not so clear, probably due to the uneven distribution of the microbubbles in the samples.
4. Conclusions
The present paper investigates the defect tolerance capability of flawed silicone specimens subjected to tensile loading, adopting both a theoretical and an experimental approach. Silicone rubber has been chosen as illustrative of the typical response of soft matter in general, including other polymers, gels, and biological tissues. Different flaw geometries, sizes, and rates of the applied strain are examined in the experimental tests, with the aim of understanding their influence on the macroscopic mechanical response of the samples. The presence of internal defects, in the form of microbubbles, is also considered. The experimental response is monitored by measuring the applied force and using the Digital Image Correlation (DIC) technique to obtain precise two-dimensional displacement and full-field strain maps.
Flawed samples of soft materials subjected to tensile loading undergo a remarkable notch blunting prior to failure, which tends to reduce the stress concentration due to the presence of the flaw. Moreover, when notches are contained in nonconfined thin elements, a further notch blunting occurs as consequence of the local buckling of the material in the compressed zones, which arises normally to the loading direction. Experimental tests on thin silicone plates with elliptical notches showed that, irrespective of the initial size of the notch, very high remote stresses are supported thanks to the favorable notch profile evolution under load. With respect to the strain rate effects, we can observe that the flaw sensitivity is augmented at higher rates while, if a sufficiently slow strain rate is applied, the ultimate strain before failure is less affected by the size of the initial flaw. Indeed, slow deformation rates allow the internal microstructure of the material in high strained regions to be rearranged and to fail locally, with the consequence to smooth out the peak strain arising close to the geometric discontinuities.
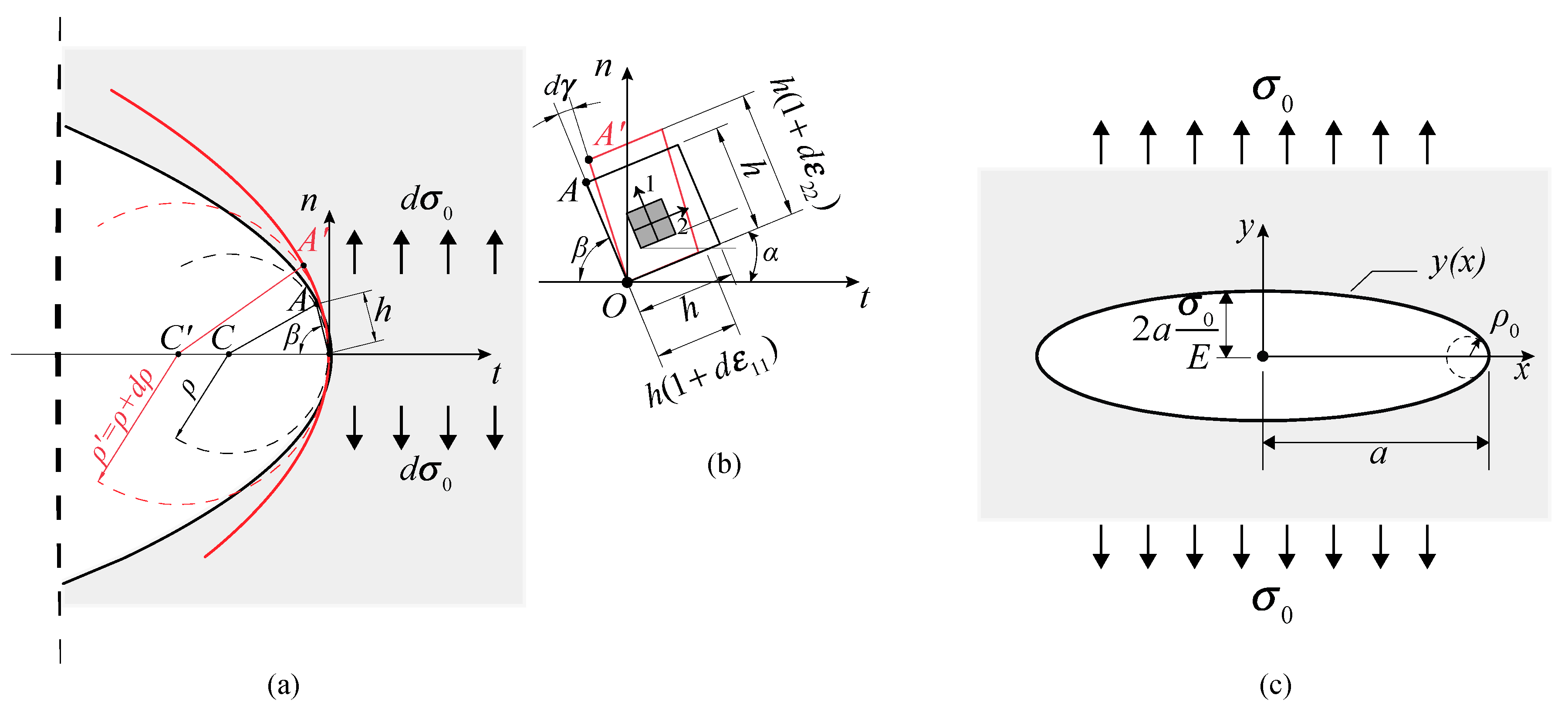
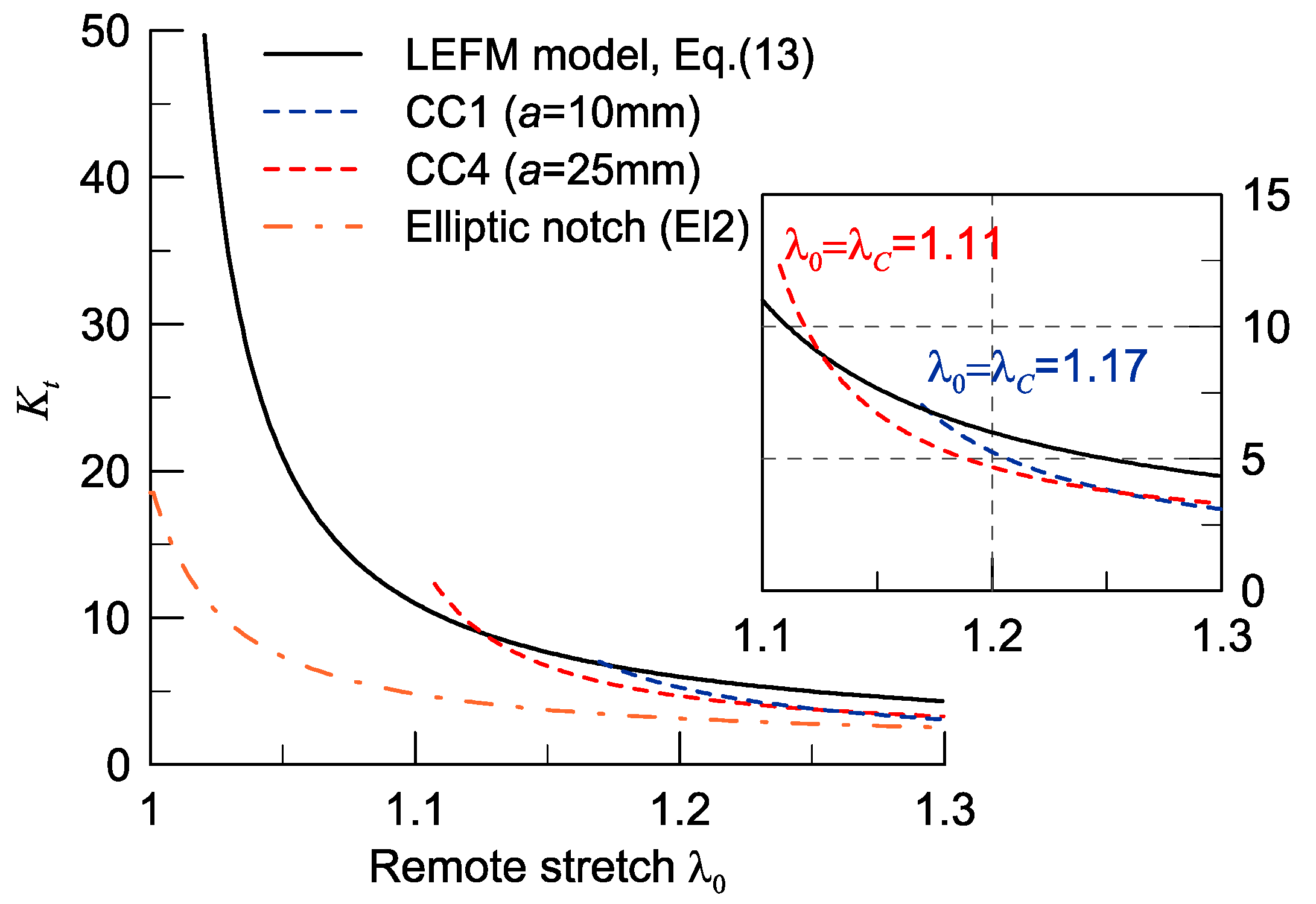
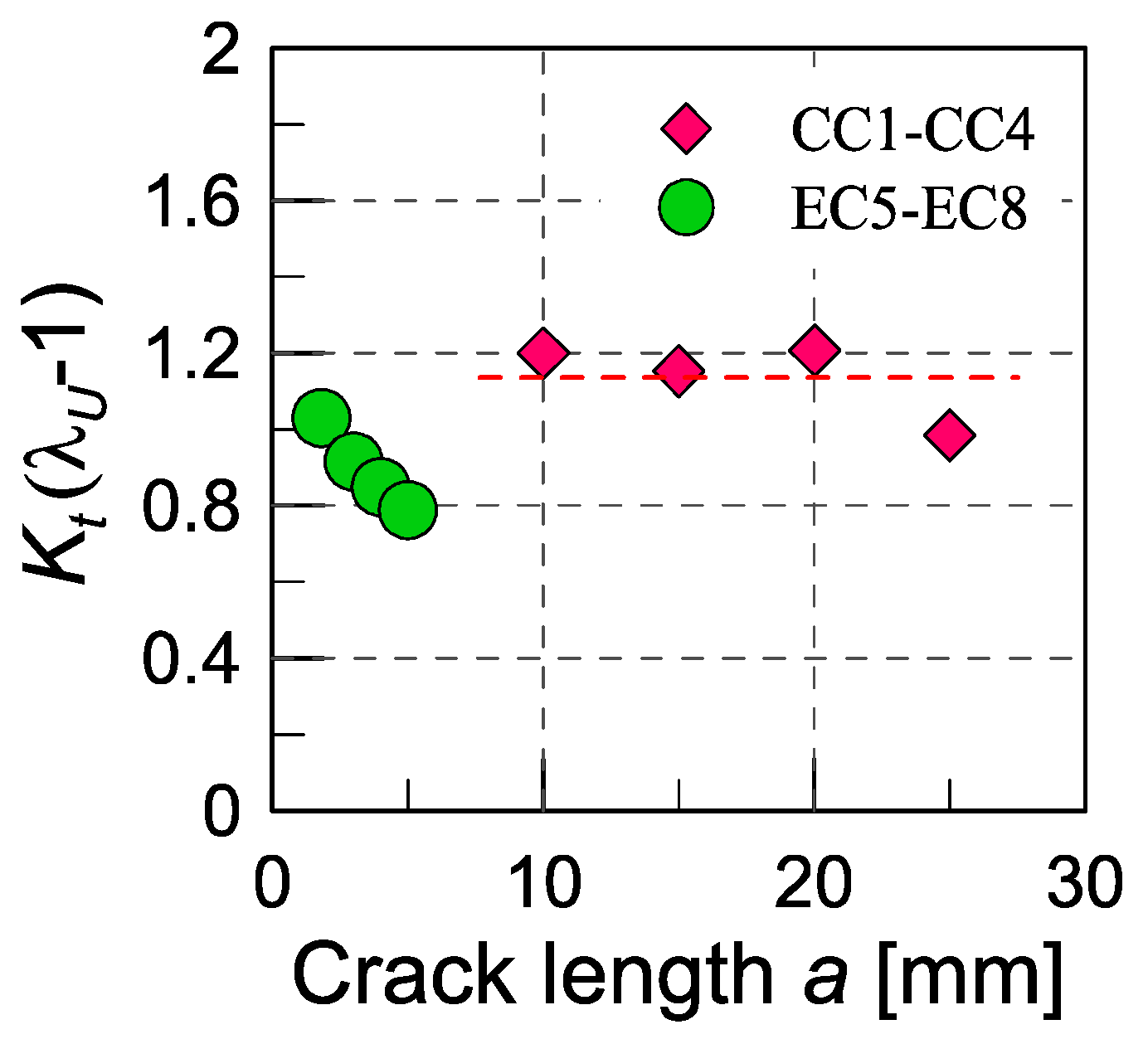
A simple analytical model is proposed to account for the effect of crack blunting, in terms of the increase of the tip radius with the remote applied stretch. Although based on the assumption of linear elastic behavior, the application of the model to the experimental results has provided an interesting insight into the defect tolerance of cracked thin plates under tensile loading. Specifically, we have observed a transition from a typical flaw-size-dependent failure, as predicted by linear elastic fracture mechanics, to rupture occurring at a constant theoretical strength of the material. Our results show that, even at flaw lengths larger than the critical size found in other studies [
20], silicone rubber specimens can withstand large stretches thanks to the flaw reshaping allowed by their peculiar microstructure. We are confident that the obtained results might be applied profitably to the evaluation of the safety levels of notched soft structural components, commonly found in numerous advanced applications.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}