Multi-Resonant-Based Sliding Mode Control of DFIG-Based Wind System under Unbalanced and Harmonic Network Conditions


Abstract
:1. Introduction
2. Sliding Mode Control Law of the DFIG System
2.1. Sliding Mode Control of DFIG (RSC)
2.2. Sliding Mode Control of GSC
3. Analysis of MRSMC Strategy
3.1. Stability and Robustness
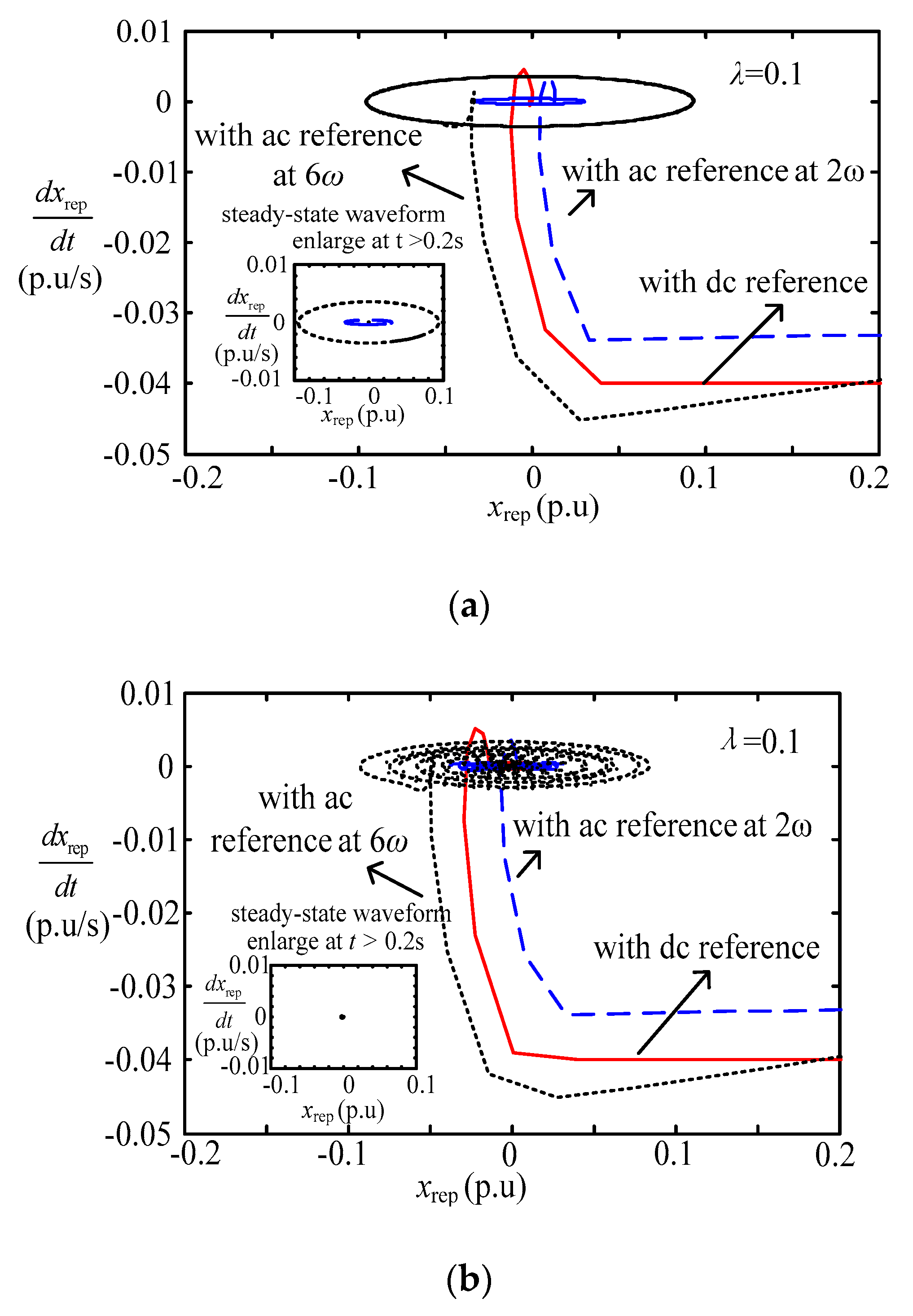
3.2. Tracking Behavior with Distorted Grid
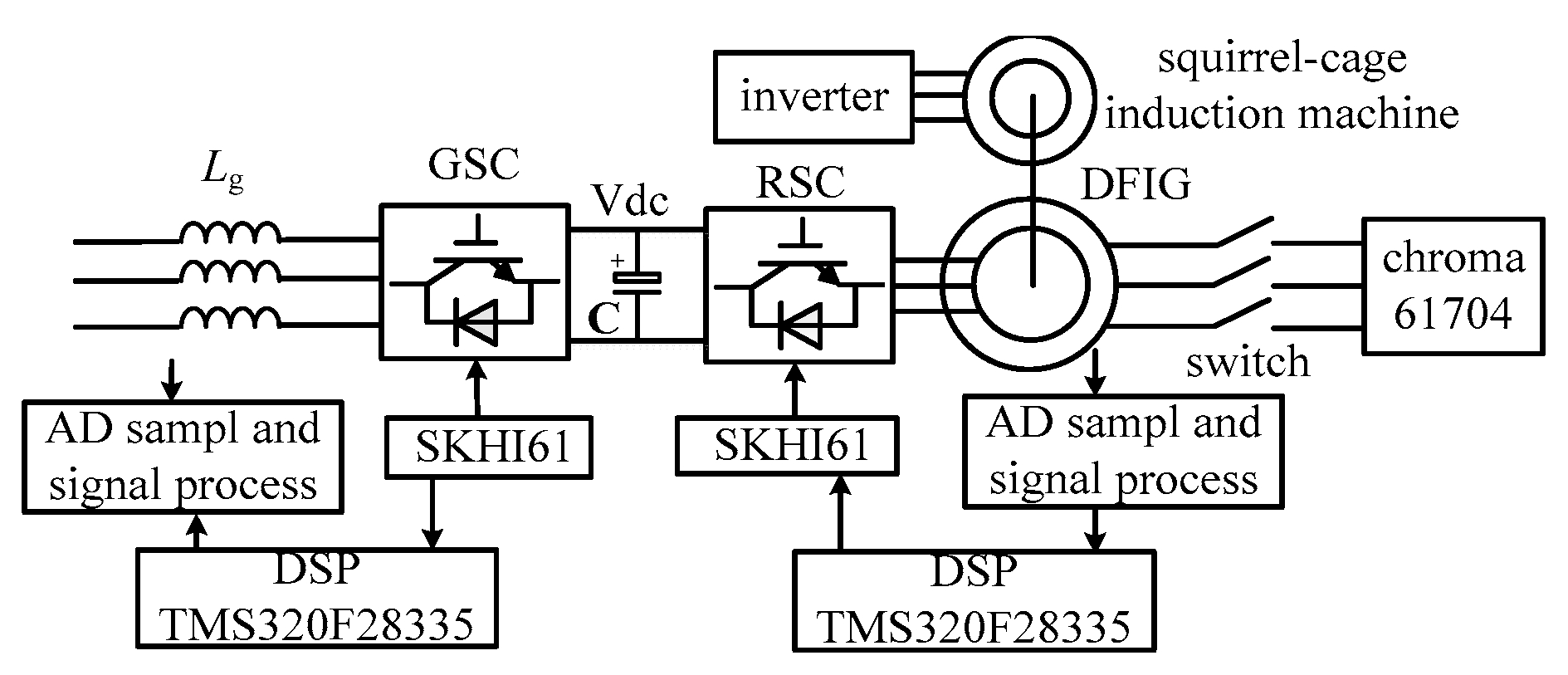
4. System Implementation
4.1. Active and Reactive Power References
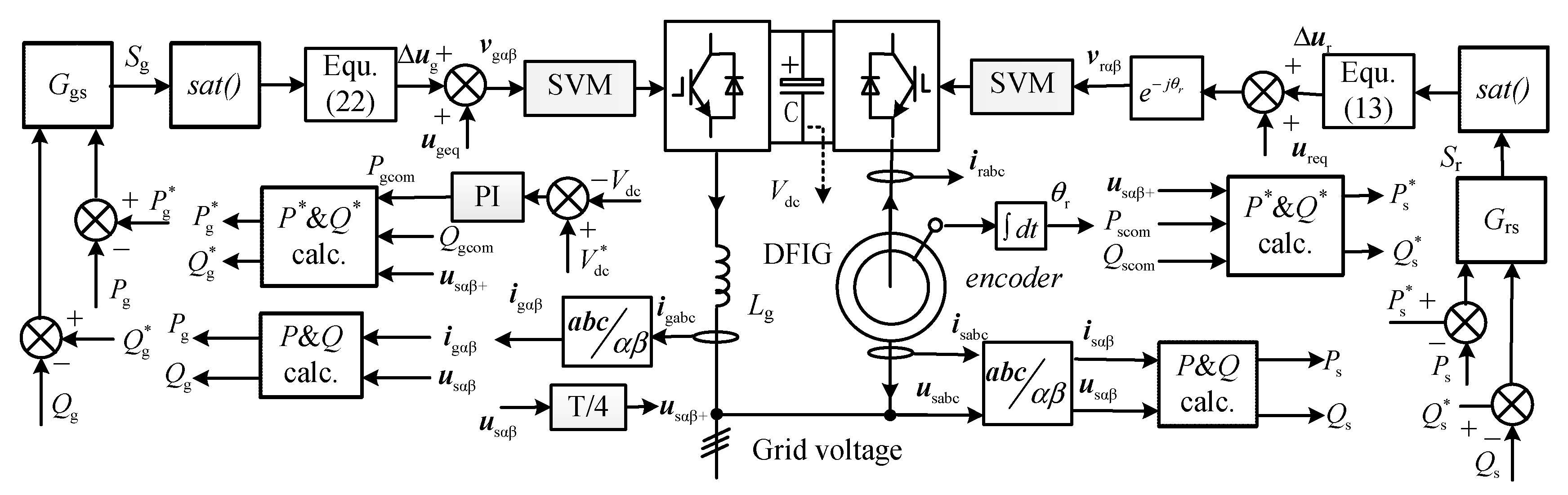
4.2. MRSMC System Implementation
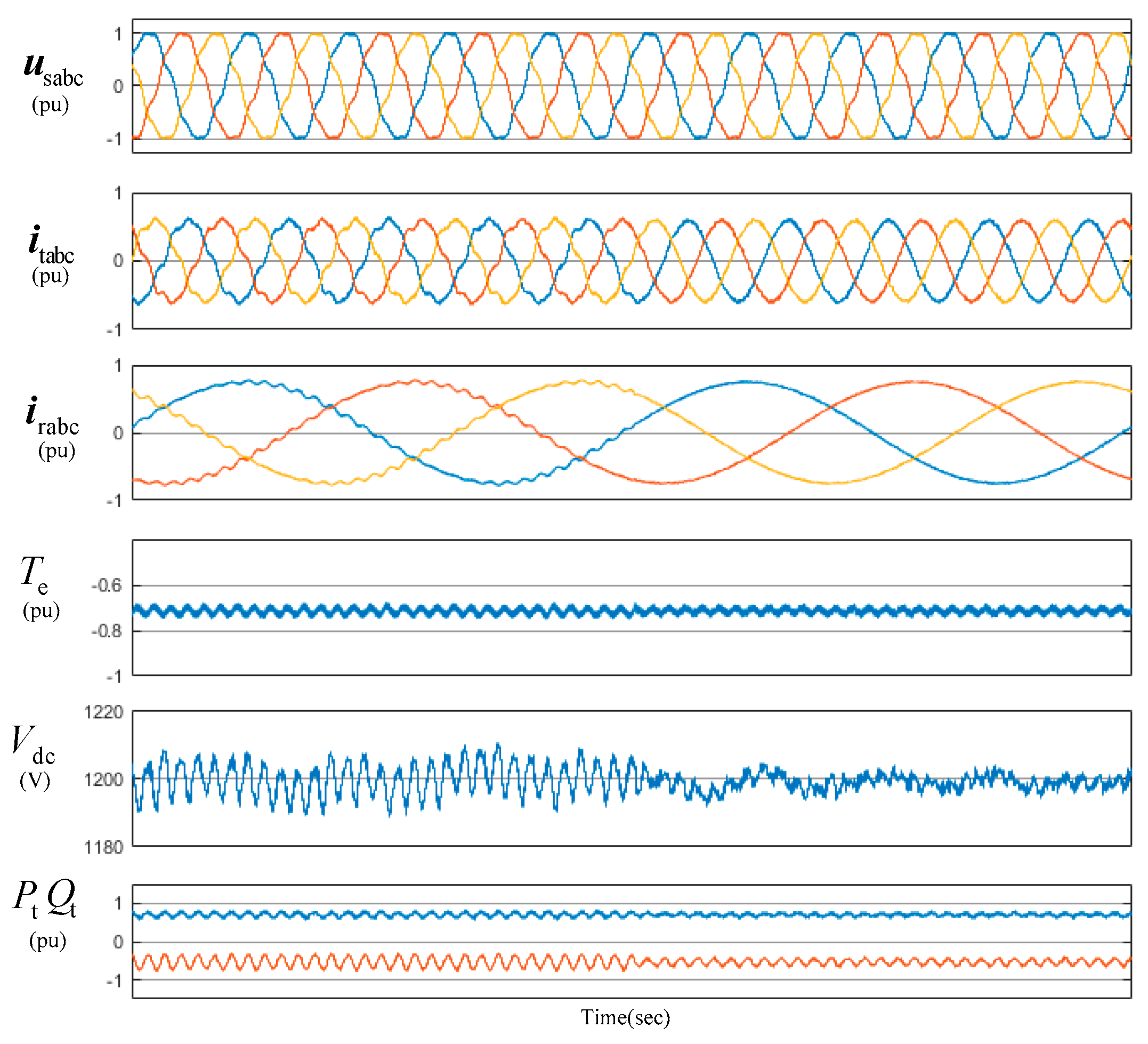
5. Simulation Results
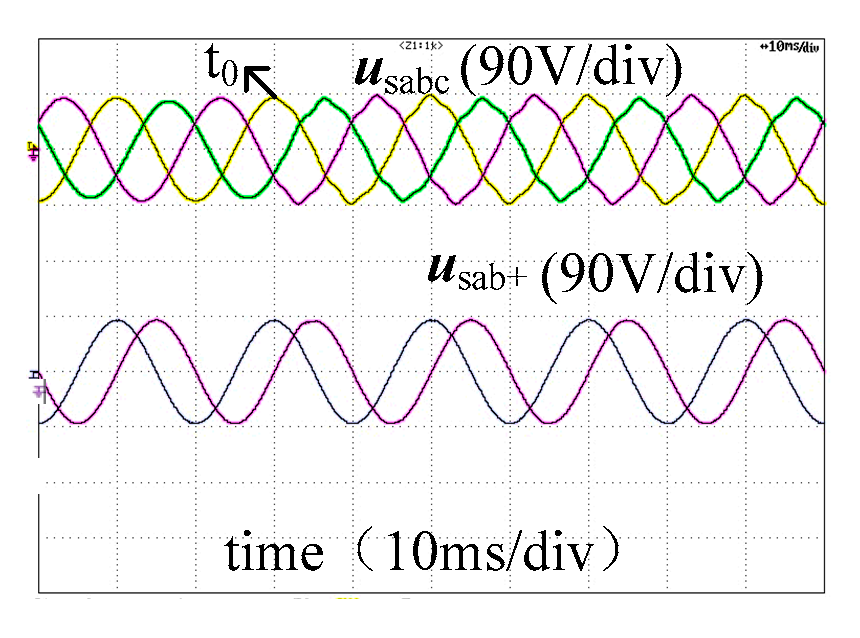
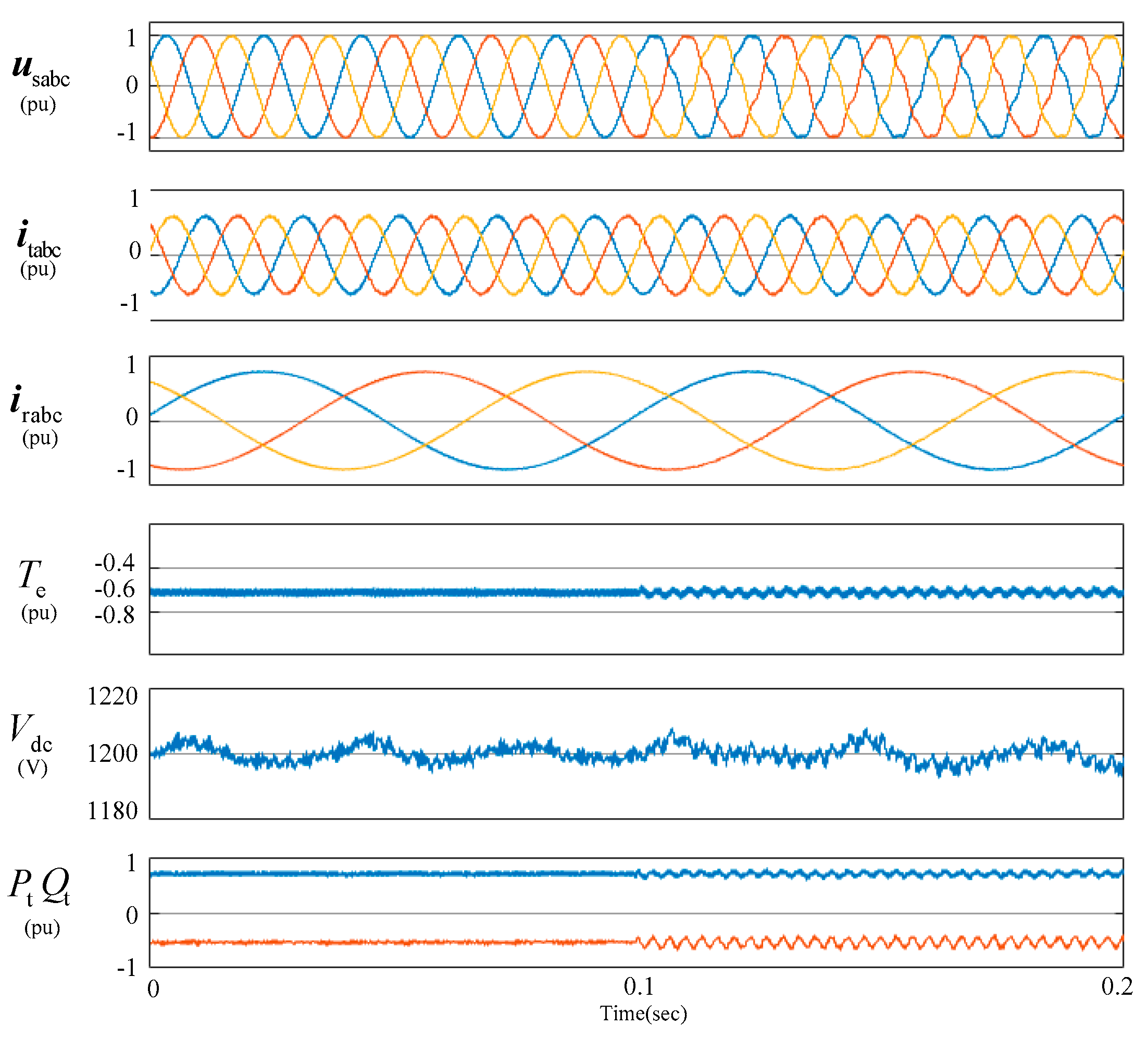
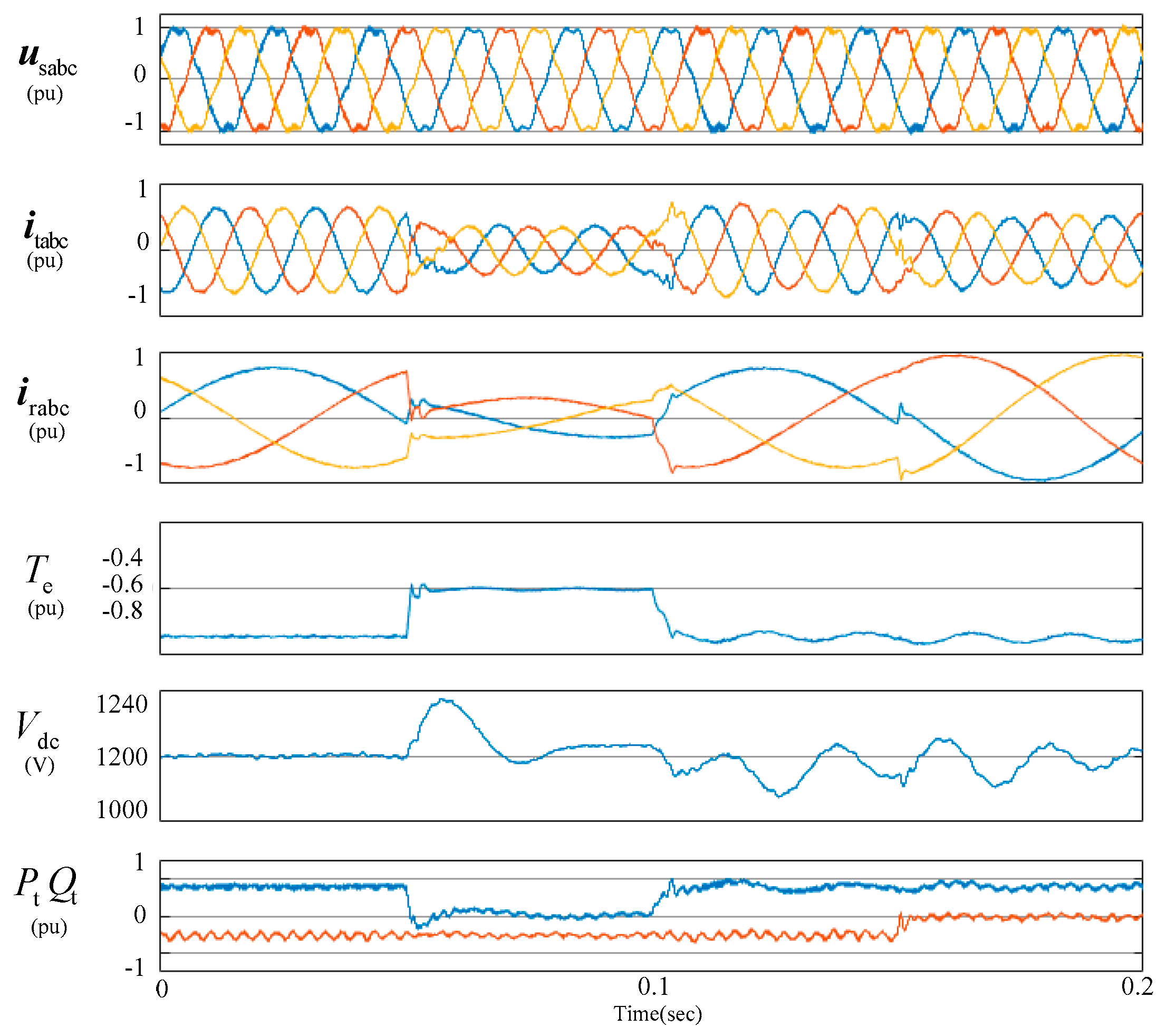
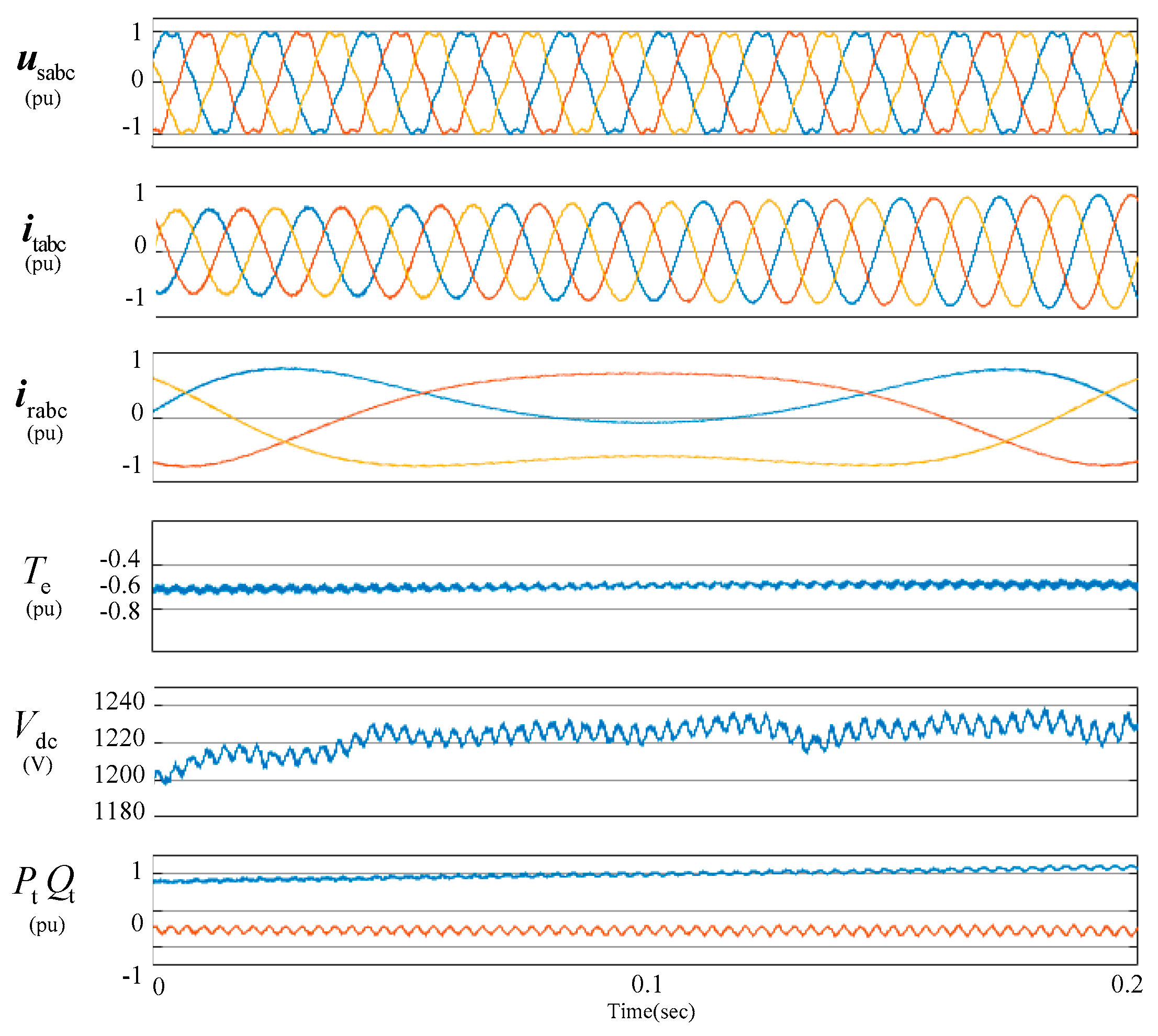
6. Experimental Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ug, ig | GSC output voltage and current vectors. |
| ur, ir, is | Rotor voltage and current vectors, stator current vectors. |
| , | Stator, rotor flux linkage vectors. |
| ω, ωr | Grid and rotor angular frequencies. |
| Pe, Ps, Qs | Electromagnetic power, stator output active and reactive powers. |
| Pg, Qg | GSC output active and reactive powers. |
| Ls, Lr, Lm | Stator, rotor self- inductances, mutual inductance. |
| Rs, Rr | Stator, rotor resistances. |
| Lg, Rg, C | GSC inductance and resistance, the capacitance of the dc link. |
| Ir, it | The load current of the rotor side, system total current vectors. |
| Subscripts | |
| α, β | Stationary α, β axis. |
| +, −, 5−, 7+ | Fundamental, unbalanced, 5− and 7+ -order components. |
| Superscripts | |
| * | Reference value for controller. |
| ∧ | Conjugate complex. |
References
- Energinet, D.K. Technical Regulation 3.2.5 for Wind Power Plants with a Power Output Greater than 11 kW. September 2010. Available online: http://www.energinet.dk (accessed on 1 October 2014).
- Grid Code-High and Extra High Voltage; E.ON Netz GmbH: Bayreuth, Germany, August 2003.
- Voltage Characteristics of Electricity Supplied by Public Distribution System, European Standard EN50160 (2007); CENELEC: Brussels, Belgium, 2007.
- Singh, G.K. Power system harmonics research: A survey. Eur. Trans. Electr. Power 2007, 19, 151–172. [Google Scholar] [CrossRef]
- Kiani, M.; Lee, W.J. Effects of voltage unbalance and system harmonics on the performance of doubly-fed induction wind generators. IEEE Trans. Ind. Appl. 2010, 46, 562–568. [Google Scholar] [CrossRef]
- Xu, H.; Hu, J.; He, Y. Operation of Wind-Turbine-Driven DFIG Systems Under Distorted Grid Voltage Conditions: Analysis and Experimental Validations. IEEE Trans. Power Electron. 2012, 27, 2354–2366. [Google Scholar] [CrossRef]
- Phan, V.-T.; Lee, H.-H. Performance Enhancement of Stand-Alone DFIG Systems with Control of Rotor and Load Side Converters Using Resonant Controllers. IEEE Trans. Ind. Appl. 2012, 48, 199–210. [Google Scholar] [CrossRef]
- Liu, C.; Blaabjerg, F.; Chen, W.; Xu, D. Stator Current Harmonic Control with Resonant Controller for Doubly Fed Induction Generator. IEEE Trans. Power Electron. 2012, 27, 3207–3220. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Solsona, J.A. Ride-Through Enhancement of DFIG-Based Wind Generation Considering Unbalanced and Distorted Conditions. IEEE Trans. Energy Convers. 2012, 27, 775–783. [Google Scholar] [CrossRef]
- Song, Y.; Nian, H. Modularized Control Strategy and Performance Analysis of DFIG System Under Unbalanced and Harmonic Grid Voltage. IEEE Trans. Power Electron. 2015, 30, 4831–4842. [Google Scholar] [CrossRef]
- Hu, J.; Xu, H.; He, Y. Coordinated Control of DFIG’s RSC and GSC Under Generalized Unbalanced and Distorted Grid Voltage Conditions. IEEE Trans. Ind. Electron. 2013, 60, 2808–2819. [Google Scholar] [CrossRef]
- Utkin, V.I.; Güldner, J.; Shi, J.X. Sliding Mode Control in Electromechanical Systems; CRC Press: Boca Raton, FL, USA, 1999; pp. 115–130. [Google Scholar]
- Xu, L.; Cartwright, P. Direct active and reactive power control of DFIG for wind energy generation. IEEE Trans. Energy Convers. 2006, 21, 750–758. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. In Proceedings of the 1996 IEEE International Workshop on Variable Structure Systems, Tokyo, Japan, 5–6 December 2016. [Google Scholar] [CrossRef]
- Beltran, B.; Ahmed-Ali, T.; Mohamed, E. High-Order Sliding-Mode Control of Variable-Speed Wind Turbines. IEEE Trans. Ind. Electron. 2009, 56, 3314–3321. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.; Nian, H.; Hu, B.; He, Y.; Zhu, Z.Q. Direct Active and Reactive Power Regulation of DFIG Using Sliding-Mode Control Approach. IEEE Trans. Energy Convers. 2010, 25, 1028–1039. [Google Scholar] [CrossRef]
- Hu, J.; Yuan, X. VSC-based direct torque and reactive power control of doubly fed induction generato. Renew. Energy 2012, 40, 13–23. [Google Scholar] [CrossRef]
- Evangelista, C.; Puleston, P.; Valenciaga, F.; Fridman, L.M. Lyapunov-Designed Super-Twisting Sliding Mode Control for Wind Energy Conversion Optimization. IEEE Trans. Ind. Electron. 2013, 60, 538–545. [Google Scholar] [CrossRef]
- Susperregui, A.; Itsaso Martinez, M.; Tapia, G.; Vechiu, I. Second-order sliding-mode controller design and tuning for grid synchronisation and power control of a wind turbine-driven doubly fed induction generator. IET Renew. Power Gener. 2013, 7, 540–551. [Google Scholar] [CrossRef]
- Martinez, M.I.; Susperregui, A.; Tapia, G.; Xu, L. Sliding-mode control of a wind turbine-driven double-fed induction generator under non-ideal grid voltages. IET Renew. Power Gener. 2013, 7, 370–379. [Google Scholar] [CrossRef]
- Chen, S.Z.; Cheung, N.; Wong, K.C.; Wu, J. Integral sliding-mode direct torque control of doubly-fed induction generators under unbalanced grid voltage. IEEE Trans. Energy Convers. 2010, 5, 356–368. [Google Scholar] [CrossRef]
- Shang, L.; Hu, J. Sliding-Mode-Based Direct Power Control of Grid-Connected Wind-Turbine-Driven Doubly Fed Induction Generators Under Unbalanced Grid Voltage Conditions. IEEE Trans. Energy Convers. 2012, 27, 362–373. [Google Scholar] [CrossRef]
- Martinez, M.I.; Tapia, G.; Susperregui, A.; Camblong, H. Sliding-Mode Control for DFIG Rotor- and Grid-Side Converters Under Unbalanced and Harmonically Distorted Grid Voltage. IEEE Trans. Energy Convers. 2012, 27, 328–339. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W. A Sliding-Mode Controller with Multiresonant Sliding Surface for Single-Phase Grid-Connected VSI With an LCL Filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Power | 2 MW | Uab (rms) | 690 V | fs | 50 Hz |
|---|---|---|---|---|---|
| Lls | 77.29 μH | Llr | 83.35 μH | Rr | 0.0029 Ω |
| Lm | 2.5 mH | Rs | 0.0025 Ω | fsample | 10 kHz |
| C | 8800 μF | Udc | 1200 V | fswitch | 2.5 kHz |
| stator/rotor | 0.33 | Lg | 250 μH | pole pairs | 2 |
| FFT Result | ISMC | MRSMC |
|---|---|---|
| THD of itabc | 9.71% | 3.14% |
| 5th harmonics of itabc | 6.53% | 0.65% |
| 7th harmonics of itabc | 6.50% | 0.64% |
| Rated Power | 1 kW | Uab (rms) | 110 V/50 Hz |
|---|---|---|---|
| Ls | 93.1 mH | Lr (pu) | 93.1 mH |
| Lm | 87.5 mH | Rs (pu) | 1.01 Ω |
| Rr | 0.88 Ω | stator/rotor | 0.33 |
| Lg | 4 mH | pole pairs | 3 |
| C | 2200 μF | Udc | 200 V |
| fsample | 10 kHz | fswitch | 5 kHz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quan, Y.; Hang, L.; He, Y.; Zhang, Y. Multi-Resonant-Based Sliding Mode Control of DFIG-Based Wind System under Unbalanced and Harmonic Network Conditions. Appl. Sci. 2019, 9, 1124. https://doi.org/10.3390/app9061124
Quan Y, Hang L, He Y, Zhang Y. Multi-Resonant-Based Sliding Mode Control of DFIG-Based Wind System under Unbalanced and Harmonic Network Conditions. Applied Sciences. 2019; 9(6):1124. https://doi.org/10.3390/app9061124
Chicago/Turabian StyleQuan, Yu, Lijun Hang, Yuanbin He, and Yao Zhang. 2019. "Multi-Resonant-Based Sliding Mode Control of DFIG-Based Wind System under Unbalanced and Harmonic Network Conditions" Applied Sciences 9, no. 6: 1124. https://doi.org/10.3390/app9061124
APA StyleQuan, Y., Hang, L., He, Y., & Zhang, Y. (2019). Multi-Resonant-Based Sliding Mode Control of DFIG-Based Wind System under Unbalanced and Harmonic Network Conditions. Applied Sciences, 9(6), 1124. https://doi.org/10.3390/app9061124