Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control


Abstract
:Featured Application
Abstract
1. Introduction
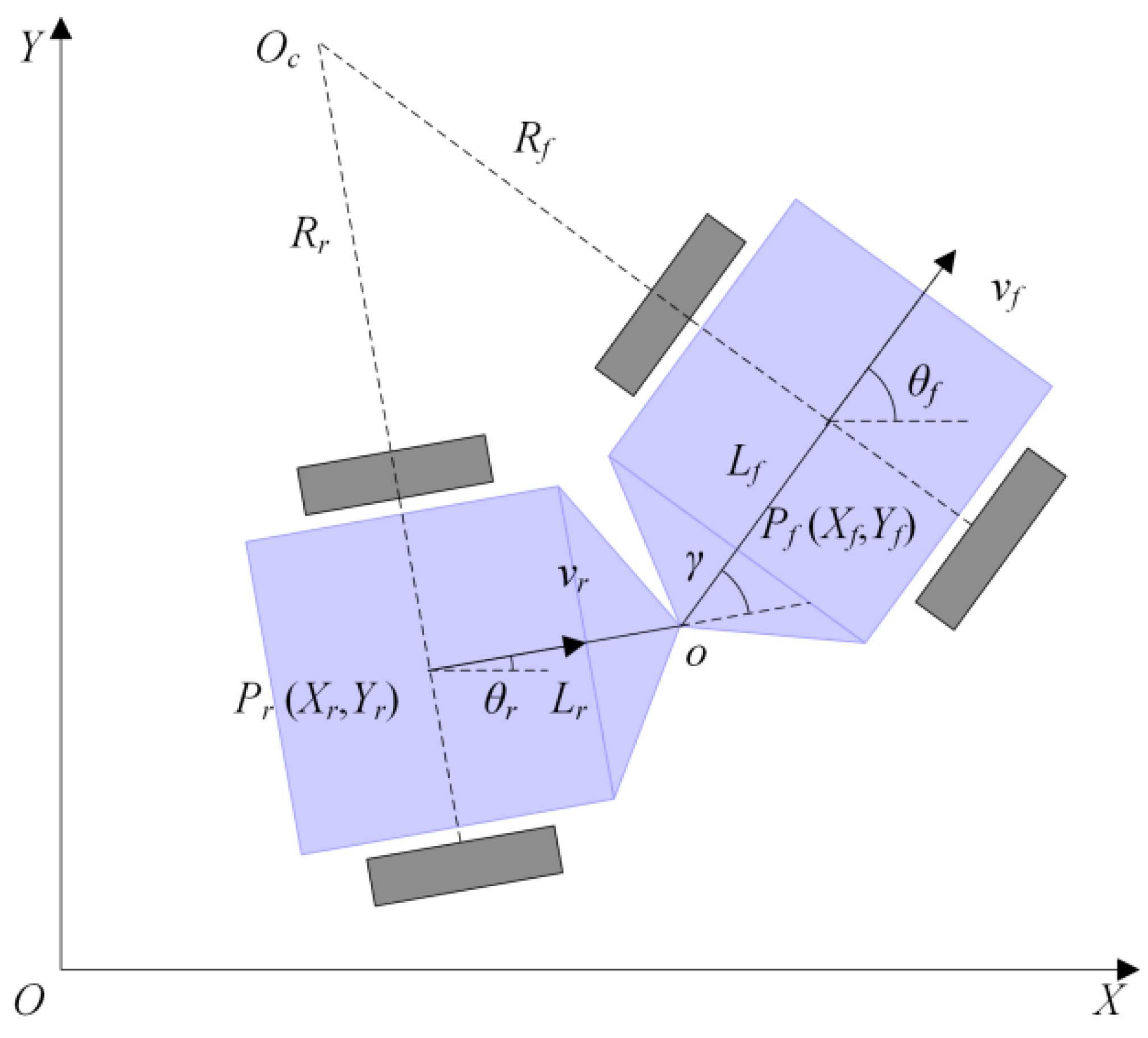
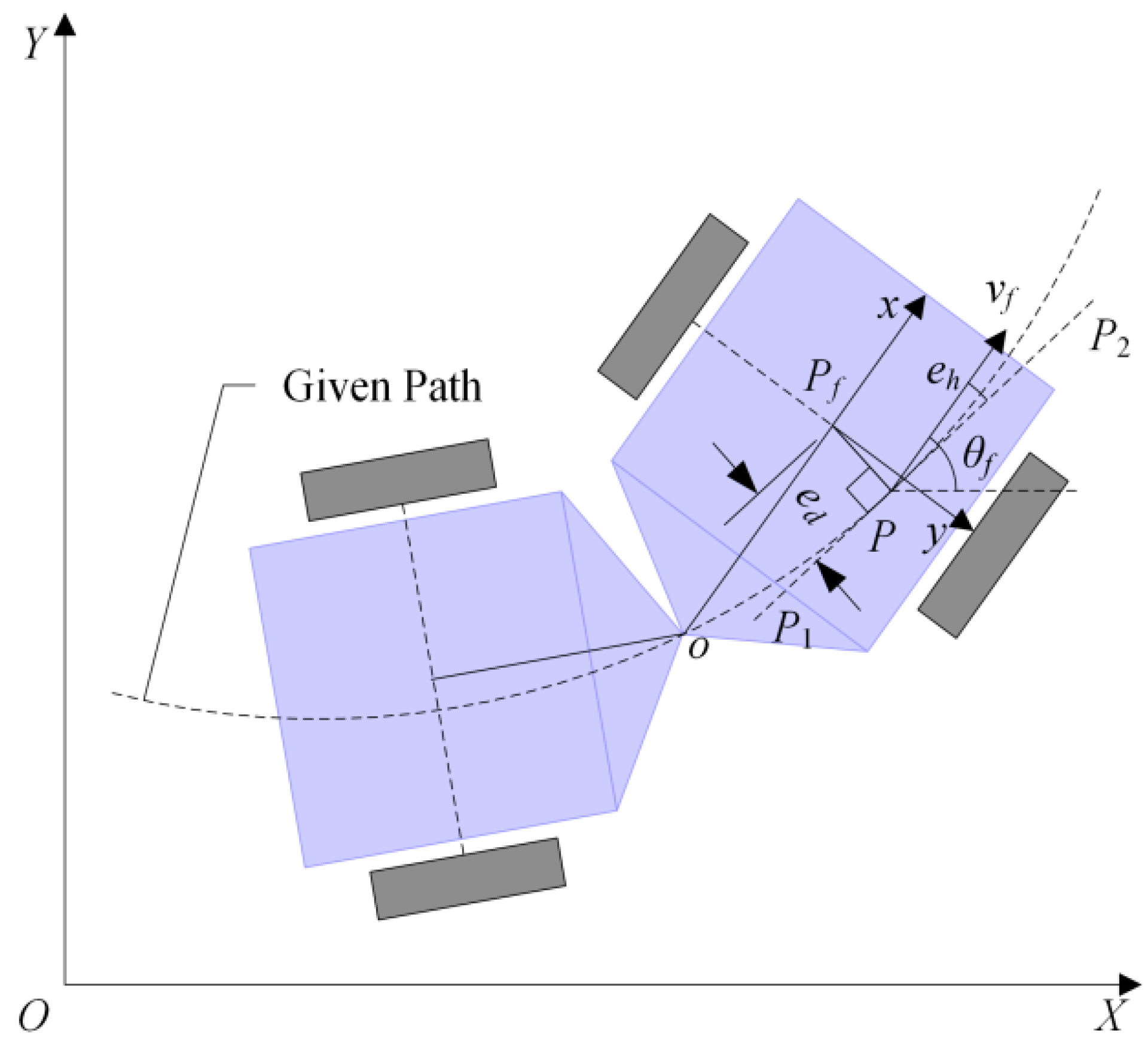
2. Controller Design
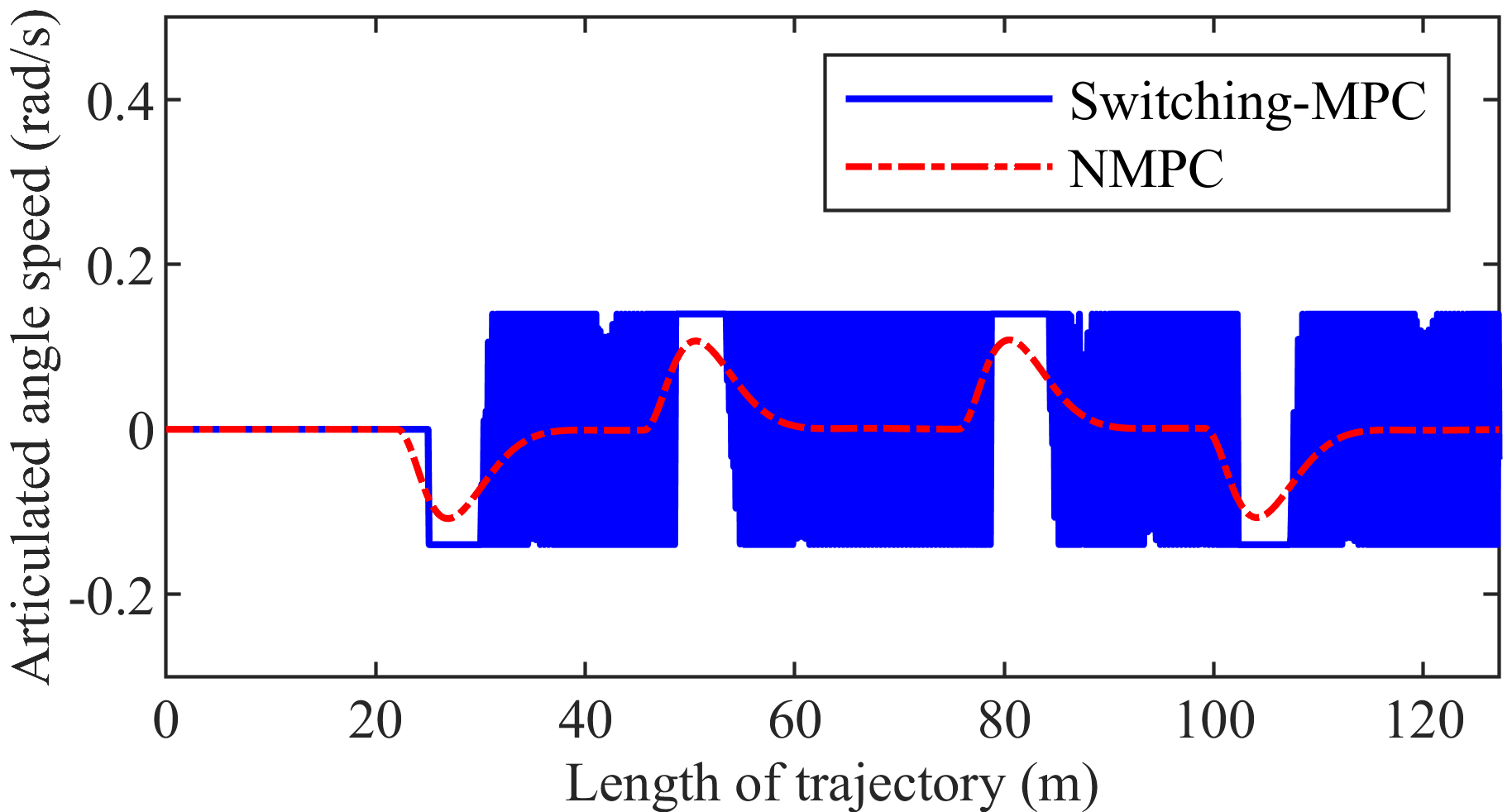
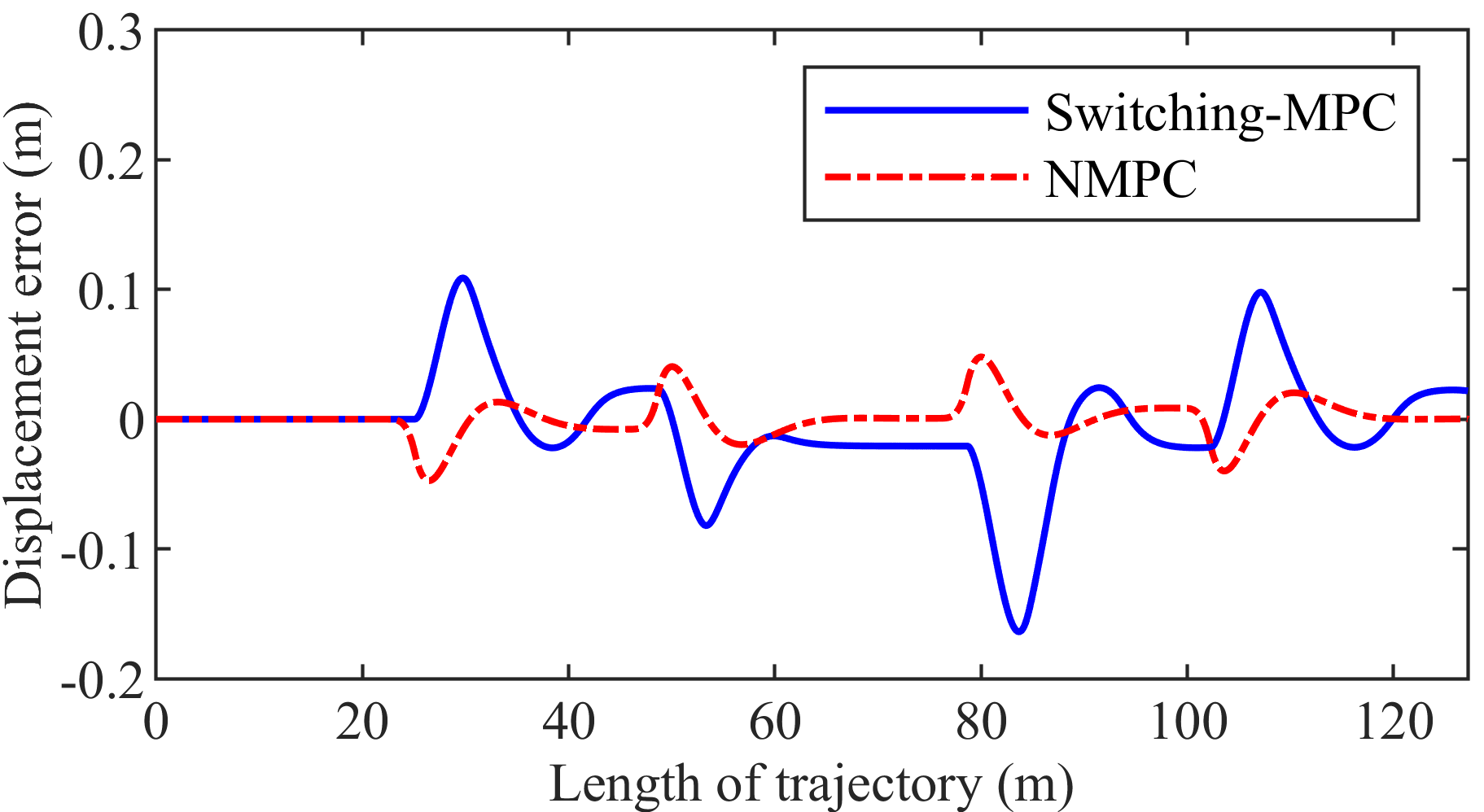
3. Simulation
3.1. Longitudinal Velocity is 2 m/s
3.2. Longitudinal Velocity is 3 m/s
3.3. Longitudinal Velocity is 4 m/s
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Alshaer, B.J.; Darabseh, T.T.; Alhanouti, M.A. Path planning, modeling and simulation of an autonomous articulated heavy construction machine performing a loading cycle. Appl. Math. Model. 2013, 37, 5315–5325. [Google Scholar] [CrossRef]
- Alshaer, B.J.; Darabseh, T.T. Modelling and control of an autonomous articulated mining vehicle navigating a predefined path. Int. J. Heavy Veh. Syst. 2014, 21, 152–167. [Google Scholar] [CrossRef]
- Corke, P.; Ridley, P. Load haul dump vehicle kinematics and control. J. Dyn. Syst. Meas. Control 2003, 125, 54–59. [Google Scholar]
- Ji, X.; Liu, Y.; He, X.; Yang, K.; Na, X.; Lv, C.; Liu, Y. Interactive control paradigm based robust lateral stability controller design for autonomous automobile path tracking with uncertain disturbance: A dynamic game approach. IEEE Trans. Veh. Technol. 2018, 67, 6906–6920. [Google Scholar] [CrossRef]
- Andersen, H.; Zhuang, J.C.; You, H.E.; Pendleton, S.; Ang, M.H., Jr. Geometric path tracking algorithm for autonomous driving in pedestrian environment. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016. [Google Scholar] [CrossRef]
- Roberts, J.M.; Duff, E.S.; Corke, P.I.; Sikka, P. Autonomous control of underground mining vehicles using reactive navigation. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.; Huang, Y. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Couchman, P.; Kouvaritakis, B.; Cannon, M. LTV models in MPC for sustainable development. Int. J. Control 2007, 79, 63–73. [Google Scholar] [CrossRef]
- Barbarisi, O.; Palmieri, G.; Scala, S.; Glielmo, L. LTV-MPC for yaw rate control and side slip control with dynamically constrained differential braking. Eur. J. Control 2009, 15, 468–479. [Google Scholar] [CrossRef]
- Mousavi, M.A.; Heshmati, Z.; Moshiri, B. LTV-MPC based path planning of an autonomous vehicle via convex optimization. In Proceedings of the 2013 21st Iranian Conference on Electrical Engineering (ICEE), Mashhad, Iran, 14–16 May 2013. [Google Scholar] [CrossRef]
- Ostafew, C.J.; Schoellig, A.P.; Barfoot, T.D. Learning-based nonlinear model predictive control to improve vision-based mobile robot path-tracking in challenging outdoor environments. J. Field Robot. 2015, 33, 133–152. [Google Scholar] [CrossRef]
- Backman, J.; Oksanen, T.; Visala, A. Navigation system for agricultural machines: Nonlinear model predictive path tracking. Comput. Electron. Agric. 2012, 82, 32–43. [Google Scholar] [CrossRef]
- Marafioti, G.; Liljeback, P.; Transeth, A.A. A study of nonlinear model predictive control (NMPC) for snake robot path following. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014. [Google Scholar] [CrossRef]
- Faulwasser, T.; Findeisen, R. Nonlinear model predictive path-following control. Lect. Notes. Contr. Inf. 2009, 384, 335–343. [Google Scholar]
- Yu, R.; Guo, H.; Sun, Z.; Chen, H. MPC-based regional path tracking controller design for autonomous ground vehicles. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Kowloon, China, 9–12 October 2015. [Google Scholar] [CrossRef]
- Yoon, Y.; Shin, J.; Kim, H.J.; Park, Y.; Sastry, S. Model-predictive active steering and obstacle avoidance for autonomous ground vehicles. Control Eng. Pract. 2009, 17, 741–750. [Google Scholar] [CrossRef]
- Urmson, C.; Ragusa, C.; Ray, D.; Anhalt, J.; Bartz, D.; Galatali, T.; Gutierrez, A.; Johnston, J.; Harbaugh, S.; Kato, H.; et al. A robust approach to high-speed navigation for unrehearsed desert terrain. J. Field Robot. 2006, 23, 467–508. [Google Scholar] [CrossRef] [Green Version]
- Kapania, N.R.; Gerdes, J.C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling. Vehicle Syst. Dyn. 2015, 53, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Zou, Z.J.; Li, T.S. Path following of underactuated surface vessels with fin roll reduction based on neural network and hierarchical sliding mode technique. Neural. Comput. Appl. 2015, 26, 1525–1535. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yang, C.C.; Hung, J.Y. Path tracking of an automatic ground vehicle with different payloads by hierarchical improved fuzzy dynamic sliding-mode control. IEEE Trans. Fuzzy Syst. 2018, 26, 899–914. [Google Scholar] [CrossRef]
- Wang, R.; Yin, G.; Zhuang, J.; Zhang, N.; Chen, J. The path tracking of four-wheel steering autonomous vehicles via sliding mode control. In Proceedings of the 2016 IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016. [Google Scholar] [CrossRef]
- Suebsaiprom, P.; Lin, C.L. Sliding mode path tracking control for fish-robot under ocean current perturbation. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control with Constraints; Pearson education: New York, NY, USA, 2002; pp. 1–6. [Google Scholar]
- Dekker, L.; Marshall, J.; Larsson, J. Experiments in feedback linearized iterative learning-based path following for center-articulated industrial vehicles. J. Field Robot. 2019. [Google Scholar] [CrossRef]
- Tan, S.; Zhao, X.; Yang, J.; Zhang, W. A path tracking algorithm for articulated vehicle: Development and simulations. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017. [Google Scholar] [CrossRef]
- Zhao, X.; Yang, J.; Zhang, W.; Zeng, J. Sliding mode control algorithm for path tracking of articulated dump truck. Trans. CSAE 2015, 31, 198–203. [Google Scholar]
- Sasiadek, JZ.; Lu, Y. Path tracking of an autonomous LHD articulated vehicle. IFAC Proc. Vol. 2005, 38, 55–60. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T. Path following for an articulated vehicle based on switching model predictive control under varying speeds and slip angles. In Proceedings of the 2012 IEEE 17th International Conference on Emerging Technologies & Factory Automation (ETFA 2012), Krakow, Poland, 17–21 September 2012. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T. Switching model predictive control for an articulated vehicle under varying slip angle. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T. A full error dynamics switching modeling and control scheme for an articulated vehicle. Int J. Control Autom. 2015, 13, 1221–1232. [Google Scholar] [CrossRef] [Green Version]
- Scheding, S.; Dissanayake, G.; Nebot, E.; Durrant-Whyte, H. Slip modelling and aided inertial navigation of an LHD. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25–25 April 1997; pp. 1904–1909. [Google Scholar]
- Scheding, S.; Dissanayake, G.; Nebot, E.; Durrant-Whyte, H. An experiment in autonomous navigation of an underground mining vehicle. IEEE Trans. Robot. Autom. 1999, 15, 85–95. [Google Scholar] [CrossRef] [Green Version]
- Corke, P.I.; Ridley, P. Steering kinematics for a center-articulated mobile robot. IEEE Trans. Robotic Autom. 2001, 17, 215–218. [Google Scholar] [CrossRef]
- Nayl, T.; Nikolakopoulos, G.; Gustafsson, T. Kinematic modeling and simulation studies of a LHD vehicle under slip angles. In Proceedings of the International Conference on Modelling, Simulation and Identification, Pittsburgh, PA, USA, 7–9 November 2011; pp. 344–349. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Meaning | Front Body | Rear Body |
|---|---|---|
| Axle center | ||
| Length | ||
| Velocity | ||
| Heading | ||
| Radius | ||
| Articulated point | ||
| Steering center | ||
| Parameter | Value |
|---|---|
| 2.468 m | |
| 3.439 m | |
| Range of | (0 m/s, 6 m/s) |
| Range of | (−0.698 rad, 0.698 rad) |
| Range of | (−0.14 rad/s, 0.14 rad/s) |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Value | 0.05 s | 30 | 29 | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Ma, B. Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control. Appl. Sci. 2019, 9, 1372. https://doi.org/10.3390/app9071372
Bai G, Liu L, Meng Y, Luo W, Gu Q, Ma B. Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control. Applied Sciences. 2019; 9(7):1372. https://doi.org/10.3390/app9071372
Chicago/Turabian StyleBai, Guoxing, Li Liu, Yu Meng, Weidong Luo, Qing Gu, and Baoquan Ma. 2019. "Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control" Applied Sciences 9, no. 7: 1372. https://doi.org/10.3390/app9071372
APA StyleBai, G., Liu, L., Meng, Y., Luo, W., Gu, Q., & Ma, B. (2019). Path Tracking of Mining Vehicles Based on Nonlinear Model Predictive Control. Applied Sciences, 9(7), 1372. https://doi.org/10.3390/app9071372