A Fault Diagnosis Approach for Rolling Bearing Based on Convolutional Neural Network and Nuisance Attribute Projection under Various Speed Conditions


Abstract
:1. Introduction
2. Background
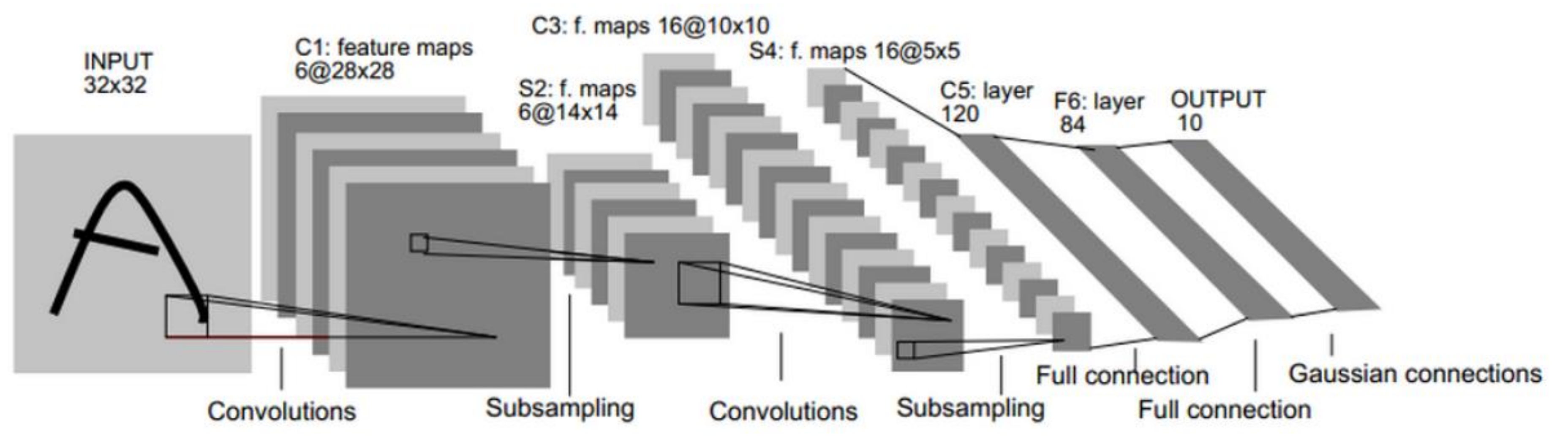
2.1. Convolutional Neural Network
- convolutional layer,
- pooling layer,
- fully connected layer.
2.2. Nuisance Attribute Projection
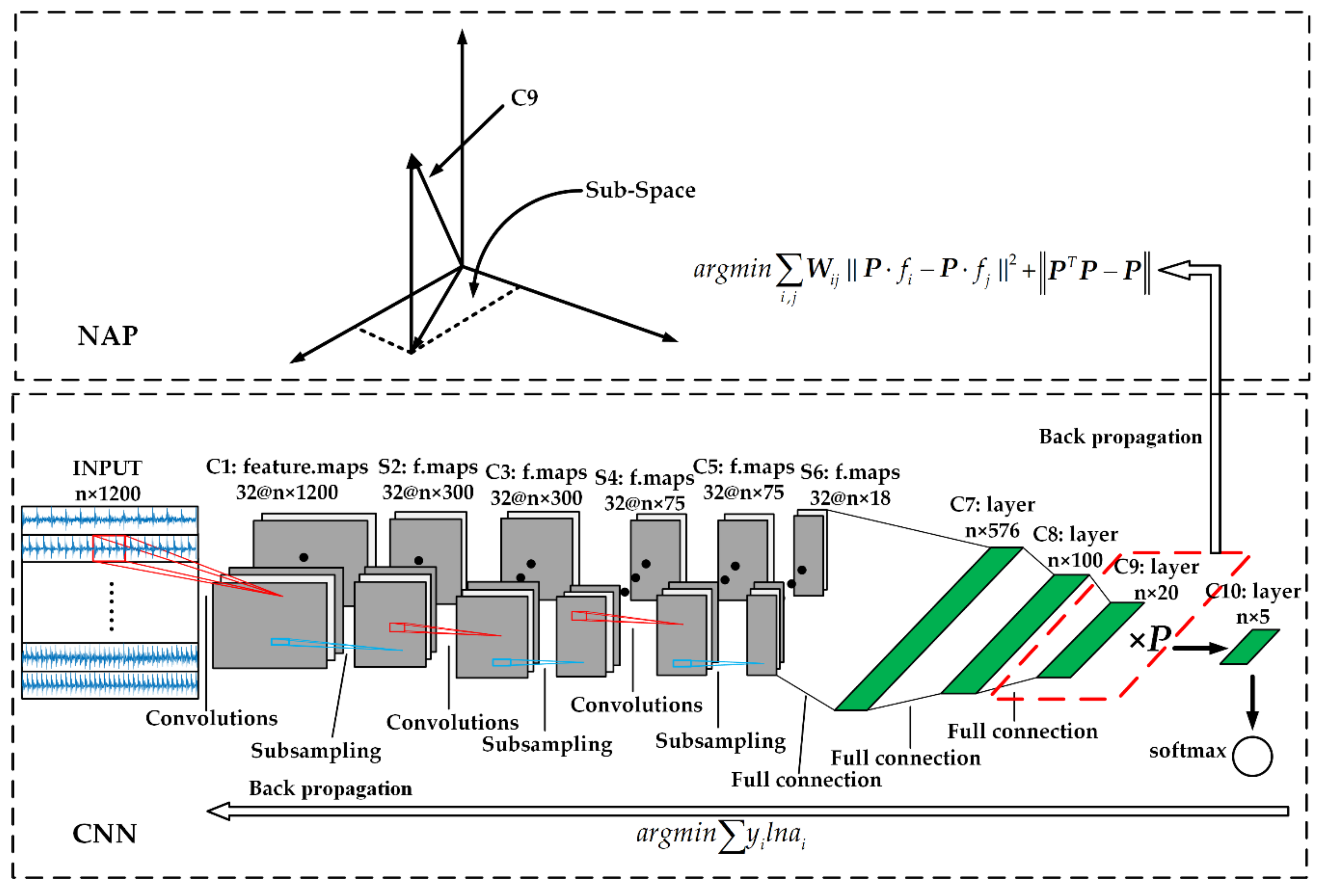
3. Proposed CNN-NAP Method
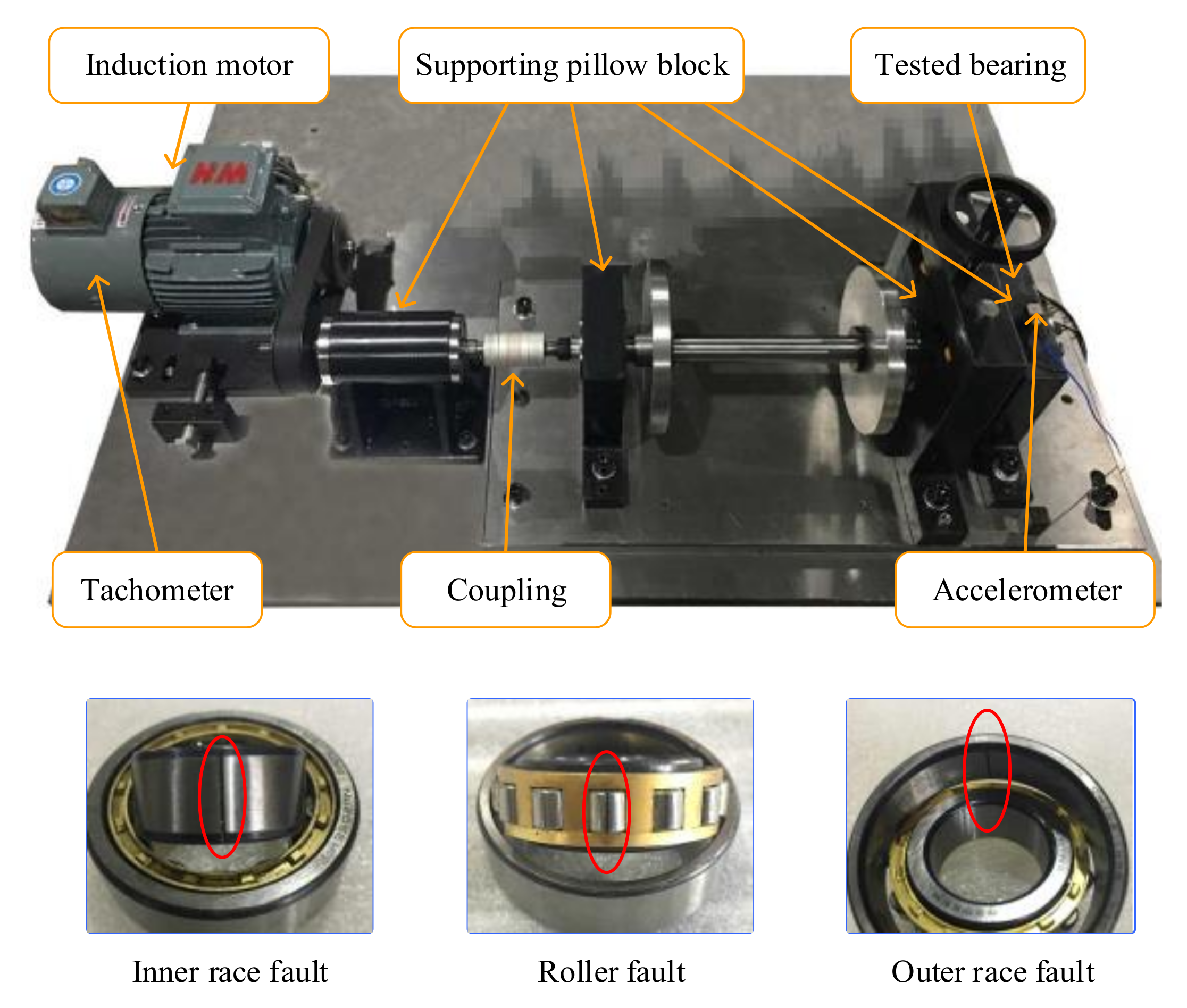
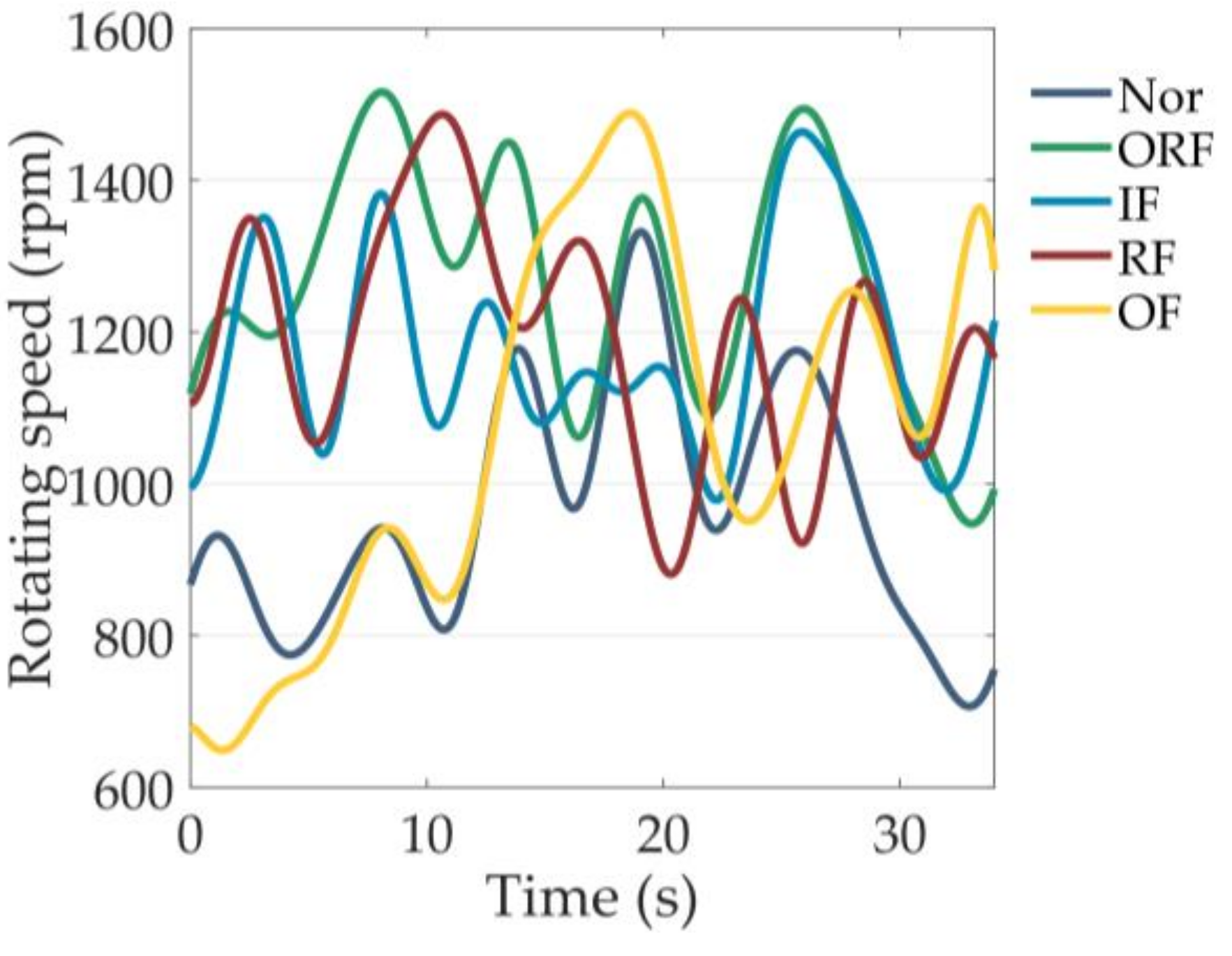
4. Validation of CNN-NAP
5. Comparison Analysis
5.1. Compared with CNN
5.2. Compared with Previous Research
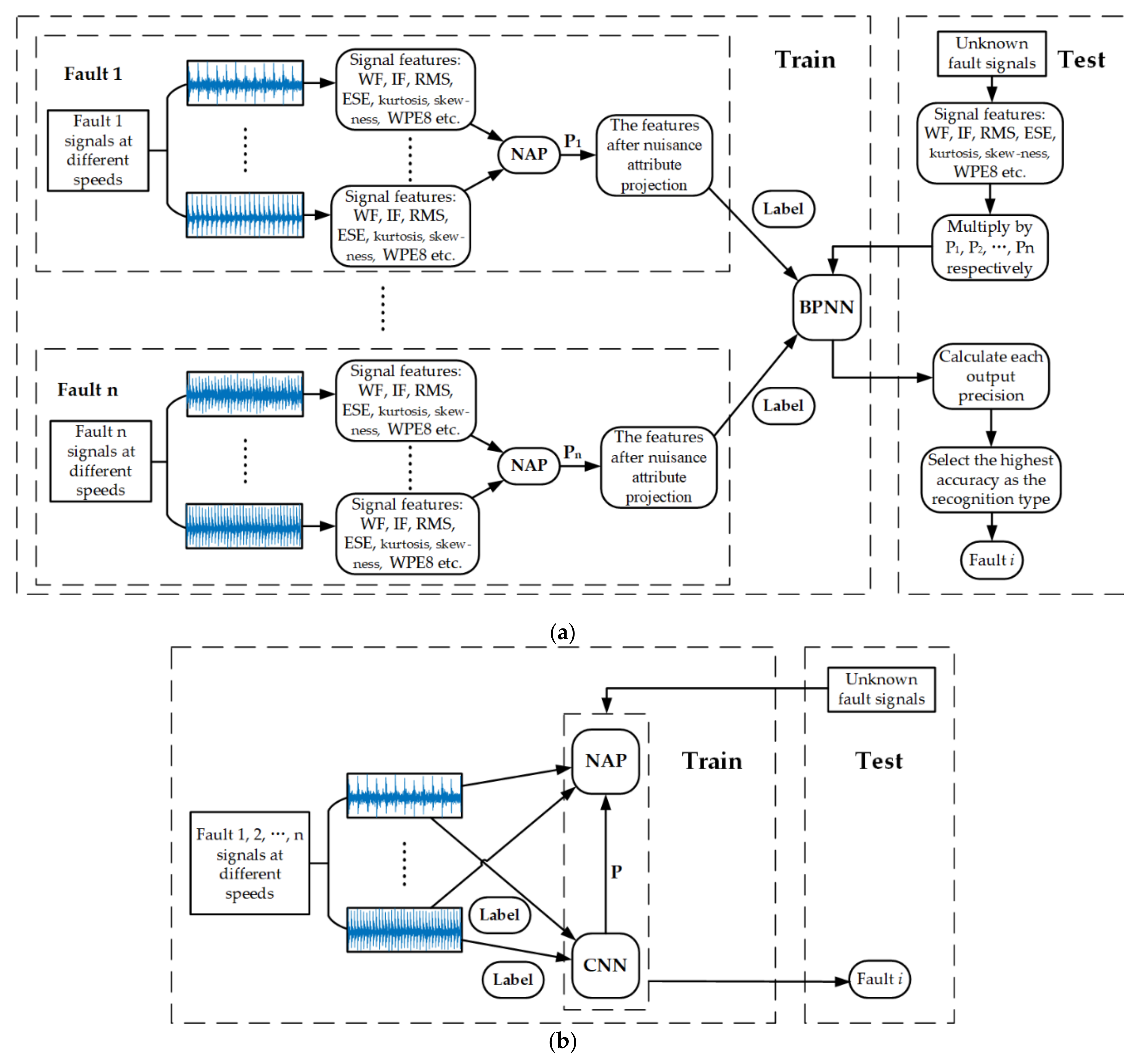
- CNN-NAP cancels the steps of extracting features manually and embeds the step of calculating projection matrix P directly into the training of neural network.
- The original method to get the projection matrix is to transform the optimization problem into the problem of finding the eigenvalues and eigenvectors. However, the CNN-NAP method directly gets the optimization problem through the neural network training, and does not need to get the projection matrix separately.
- CNN-NAP extended NAP to multiple fault cases, and the obtained projection matrix P could eliminate the nuisance attributes under each fault at the same time. In Reference [25], the corresponding number of projection matrixes P are needed for different fault types.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lei, Y.; He, Z.; Zi, Y. Application of the EEMD method to rotor fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2009, 23, 1327–1338. [Google Scholar] [CrossRef]
- Caesarendra, W.; Kosasih, B.; Tieu, A.K.; Moodie, C.A.S. Circular domain features based condition monitoring for low speed slewing bearing. Mech. Syst. Signal Process. 2014, 45, 114–138. [Google Scholar] [CrossRef]
- Lynagh, N.; Rahnejat, H.; Ebrahimi, M.; Aini, R. Bearing induced vibration in precision high speed routing spindles. Int. J. Mach. Tools Manu. 2000, 40, 561–577. [Google Scholar] [CrossRef]
- Heng, A.; Zhang, S.; Tan, A.C.C.; Mathew, J. Rotating machinery prognostics: State of the art, challenges and opportunities. Mech. Syst. Signal Process. 2009, 23, 724–739. [Google Scholar] [CrossRef]
- Lei, W.; Liu, Z.; Qiang, M.; Xin, Z. Time–frequency analysis based on ensemble local mean decomposition and fast kurtogram for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2018, 103, 60–75. [Google Scholar] [CrossRef]
- Zhang, Y.; Randall, R.B. Rolling element bearing fault diagnosis based on the combination of genetic algorithms and fast kurtogram. Mech. Syst. Signal Process. 2009, 23, 1509–1517. [Google Scholar] [CrossRef]
- Guo, Y.; Qin, S.R.; Liang, Y.Q. Order Tracking Method Based on Time-Frequency Analysis. J. Chongqing Uni. 2002, 25, 17–18. [Google Scholar]
- Fyfe, K.R.; Munck, E.D.S. Analysis of Computed Order Tracking. Mech. Syst. Signal Process. 1997, 11, 187–205. [Google Scholar] [CrossRef]
- Cheng, J.; Kang, Z.; Yang, Y.U. An order tracking technique for the gear fault diagnosis using local mean decomposition method. Mech. Mach. Theory 2012, 55, 67–76. [Google Scholar] [CrossRef]
- Hui, L.; Zheng, H.; Tang, L. Gear Fault Diagnosis Based on Order Tracking and Hilbert-Huang Transform. In Proceedings of the 6th International Conference on Fuzzy Systems and Knowledge Discovery, Tianjin, China, 14–16 August 2009. [Google Scholar]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Perez-Cruz, J.; Roger-Folch, J.; Riera-Guasp, M.; Martinez-Roman, J. Harmonic Order Tracking Analysis: A Novel Method for Fault Diagnosis in Induction Machines. IEEE Trans. Energy Conver. 2015, 30, 833–841. [Google Scholar] [CrossRef]
- Han, M.; Pan, J. A fault diagnosis method combined with LMD, sample entropy and energy ratio for roller bearings. Measurement 2015, 76, 7–19. [Google Scholar] [CrossRef]
- Shin, H.C.; Roth, H.R.; Gao, M.; Lu, L.; Xu, Z.; Nogues, I.; Yao, J.; Mollura, D.; Summers, R.M. Deep Convolutional Neural Networks for Computer-Aided Detection: CNN Architectures, Dataset Characteristics and Transfer Learning. IEEE Trans. Medi. Imaging 2016, 35, 1285–1298. [Google Scholar] [CrossRef] [PubMed]
- Qi, Y.; Shen, C.; Dong, W.; Shi, J.; Zhu, Z. Stacked Sparse Autoencoder-Based Deep Network for Fault Diagnosis of Rotating Machinery. IEEE Access 2017, 5, 15066–15079. [Google Scholar] [CrossRef]
- Tamilselvan, P.; Wang, P. Failure diagnosis using deep belief learning based health state classification. Reliab. Eng. Syst. Safe. 2013, 115, 124–135. [Google Scholar] [CrossRef]
- An, Z.; Li, S.; Wang, J.; Qian, W.; Wu, Q. An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation. Appl. Sci. 2018, 8, 906. [Google Scholar] [CrossRef]
- Lei, Y.; Feng, J.; Jing, L.; Xing, S.; Ding, S. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Lei, Y.; He, Z.; Zi, Y. A new approach to intelligent fault diagnosis of rotating machinery. Expert Syst. Appl. 2008, 35, 1593–1600. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; An, Z.; Jiang, X.; Qian, W.; Ji, S. Batch-normalized deep neural networks for achieving fast intelligent fault diagnosis of machines. Neurocomputing 2019, 329, 53–65. [Google Scholar] [CrossRef]
- Meltzer, G.; Dienb, N.P. Fault diagnosis in gears operating under non-stationary rotational speed using polar wavelet amplitude maps. Mech. Syst. Signal Process. 2004, 18, 985–992. [Google Scholar] [CrossRef]
- Campbell, W.M.; Sturim, D.E.; Reynolds, D.A.; Solomonoff, A. SVM Based Speaker Verification using a GMM Supervector Kernel and NAP Variability Compensation. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing Proceedings, Toulouse, France, 14–19 May 2006. [Google Scholar]
- Dehak, N.; Kenny, P.J.; Dehak, R.; Dumouchel, P.; Ouellet, P. Front-End Factor Analysis for Speaker Verification. IEEE Trans. Audio Speech Lang. Process. 2011, 19, 788–798. [Google Scholar] [CrossRef]
- Vesnicer, B.; Mihelič, F. The likelihood ratio decision criterion for nuisance attribute projection in GMM speaker verification. EURASIP J. Adv. Signal Process. 2008, 2008, 1–11. [Google Scholar] [CrossRef]
- Zhao, X.; Yuan, D.; Hao, Y.; Jian, Z.; Wang, H. Nonlinear kernel nuisance attribute projection for speaker verification. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008. [Google Scholar]
- Huang, W.; Cheng, J.; Yu, Y. Rolling bearing fault diagnosis and performance degradation assessment under variable operation conditions based on nuisance attribute projection. Mech. Syst. Signal Process. 2019, 114, 165–188. [Google Scholar] [CrossRef]
- Delgado, H.; Anguera, X.; Fredouille, C.; Serrano, J. Improved Binary Key Speaker Diarization System. Proceedings of 23rd European Signal Processing Conference, Nice, France, 31 August–4 September 2015. [Google Scholar]
- Long, W.; Li, X.; Liang, G.; Zhang, Y. A New Convolutional Neural Network Based Data-Driven Fault Diagnosis Method. IEEE Trans. Ind. Electron. 2018, 65, 5990–5998. [Google Scholar]
- Lee, K.B.; Cheon, S.; Chang, O.K. A Convolutional Neural Network for Fault Classification and Diagnosis in Semiconductor Manufacturing Processes. IEEE Trans. Semicond. Manuf. 2017, 30, 135–142. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lu, N.; Xing, S. Deep normalized convolutional neural network for imbalanced fault classification of machinery and its understanding via visualization. Mech. Syst. Signal Process. 2018, 110, 349–367. [Google Scholar] [CrossRef]
- Lauer, F.; Suen, C.Y. A trainable feature extractor for handwritten digit recognition. Pattern Recognit. 2007, 40, 1816–1824. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing Data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Rezaei Rad, A.; Banazadeh, M. Probabilistic Risk-Based Performance Evaluation of Seismically Base-Isolated Steel Structures Subjected to Far-Field Earthquakes. Buildings 2018, 8, 128. [Google Scholar] [CrossRef]
- Tajammolian, H.; Khoshnoudian, F.; Rad, A.R.; Loghman, V. Seismic Fragility Assessment of Asymmetric Structures Supported on TCFP Bearings Subjected to Near-field Earthquakes. Structures 2018, 13, 66–78. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inside Diameter | Outside Diameter | Thickness | Pitch Diameter | No. of Balls |
|---|---|---|---|---|
| 25 mm | 52 mm | 15 mm | 44.2 mm | 13 |
| Onehot Label | Fault Pattern | Training Data Sets | |
|---|---|---|---|
| (1,0,0,0,0) | Normal | RS (r/min) | 1000, 1300, 1500 |
| Sets | 100 | ||
| (0,1,0,0,0) | OF | RS (r/min) | 1000, 1300, 1500 |
| Sets | 100 | ||
| (0,0,1,0,0) | IF | RS (r/min) | 1000, 1300, 1500 |
| Sets | 100 | ||
| (0,0,0,1,0) | RF | RS (r/min) | 1000, 1300, 1500 |
| Sets | 100 | ||
| (0,0,0,0,1) | ORF | RS (r/min) | 1000, 1300, 1500 |
| Sets | 100 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, H.; Li, S.; An, Z. A Fault Diagnosis Approach for Rolling Bearing Based on Convolutional Neural Network and Nuisance Attribute Projection under Various Speed Conditions. Appl. Sci. 2019, 9, 1603. https://doi.org/10.3390/app9081603
Ma H, Li S, An Z. A Fault Diagnosis Approach for Rolling Bearing Based on Convolutional Neural Network and Nuisance Attribute Projection under Various Speed Conditions. Applied Sciences. 2019; 9(8):1603. https://doi.org/10.3390/app9081603
Chicago/Turabian StyleMa, Huijie, Shunming Li, and Zenghui An. 2019. "A Fault Diagnosis Approach for Rolling Bearing Based on Convolutional Neural Network and Nuisance Attribute Projection under Various Speed Conditions" Applied Sciences 9, no. 8: 1603. https://doi.org/10.3390/app9081603
APA StyleMa, H., Li, S., & An, Z. (2019). A Fault Diagnosis Approach for Rolling Bearing Based on Convolutional Neural Network and Nuisance Attribute Projection under Various Speed Conditions. Applied Sciences, 9(8), 1603. https://doi.org/10.3390/app9081603