
Theoretical Analysis of a Mathematical Relation between Driving Pressures in Membrane-Based Desalting Processes



Abstract
:1. Introduction
2. Materials and Methods
2.1. Postulates for Membrane-Based Desalting Systems
2.2. Redefining the Model for Membrane-Based Desalting Processes
2.3. Definitions of Pseudo-Driving Pressures
2.4. Similarity Coefficients and the Reflection Coefficient
2.5. A Relation between Osmotic Pressure and Hydraulic Pressure
3. Results and Discussions
3.1. A Constraint for the Monotonic Functions by the Similarity Coefficient Ratio
3.2. Verification of the Relation between the Driving Pressures in FO and PRO Modes
3.3. Verification of the Relation between Driving Pressures in the RO Mode
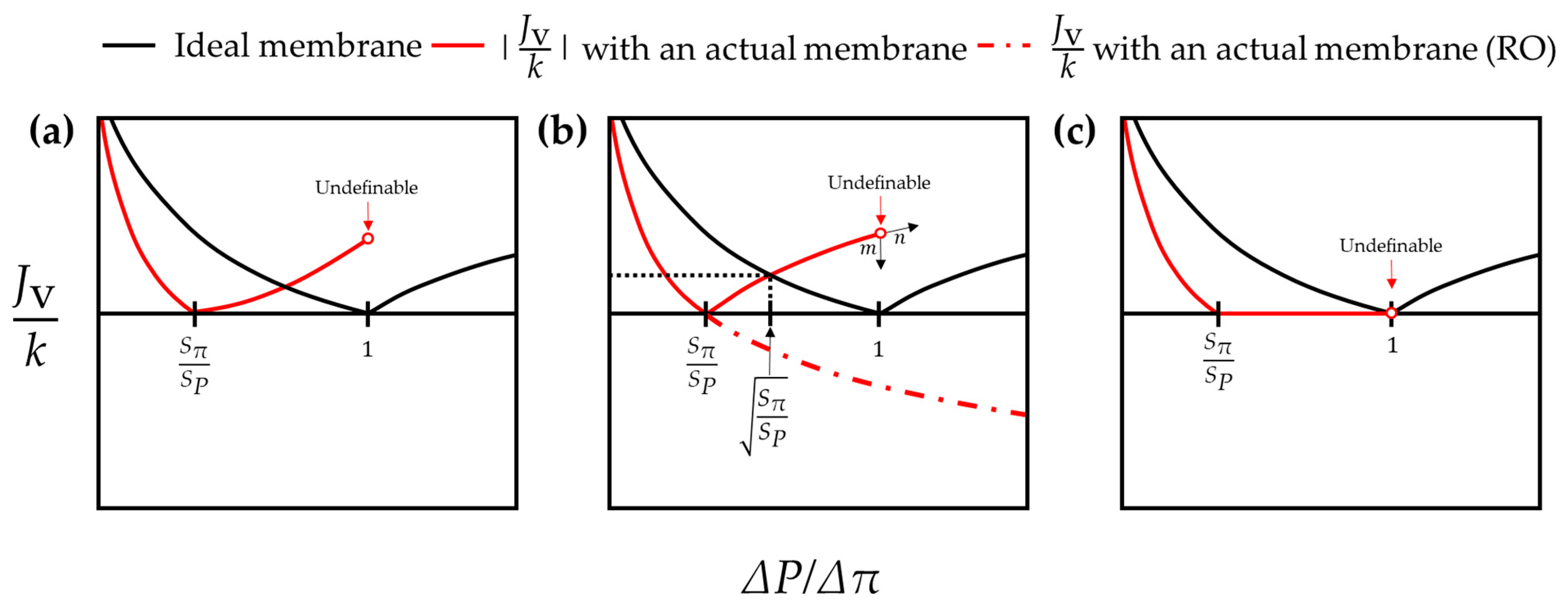
3.4. Hypothesis for the Water Flux in the Transition Region between FO/PRO and RO
- (i.)
- Figure 7a. The direction of the water flux is not reversed and the absolute value of the water flux gradually increases as approaches one;
- (ii.)
- Figure 7b. The water flux continually decreases so that the direction of the water transport gets reversed and the absolute value of the water flux gradually increases as approaches one; and
- (iii.)
- Figure 7c. The water flux converges to zero and such a tendency is sustained.
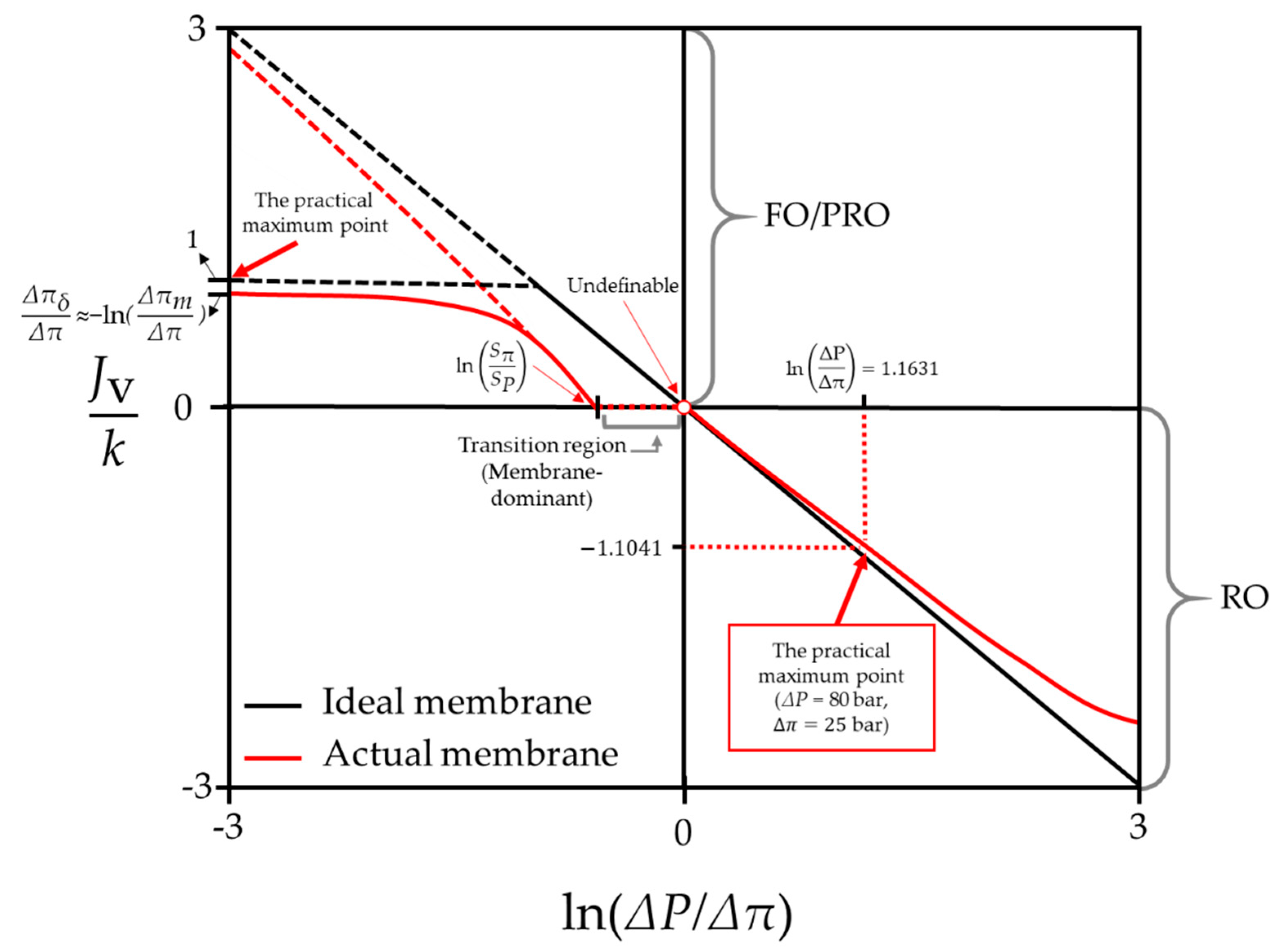
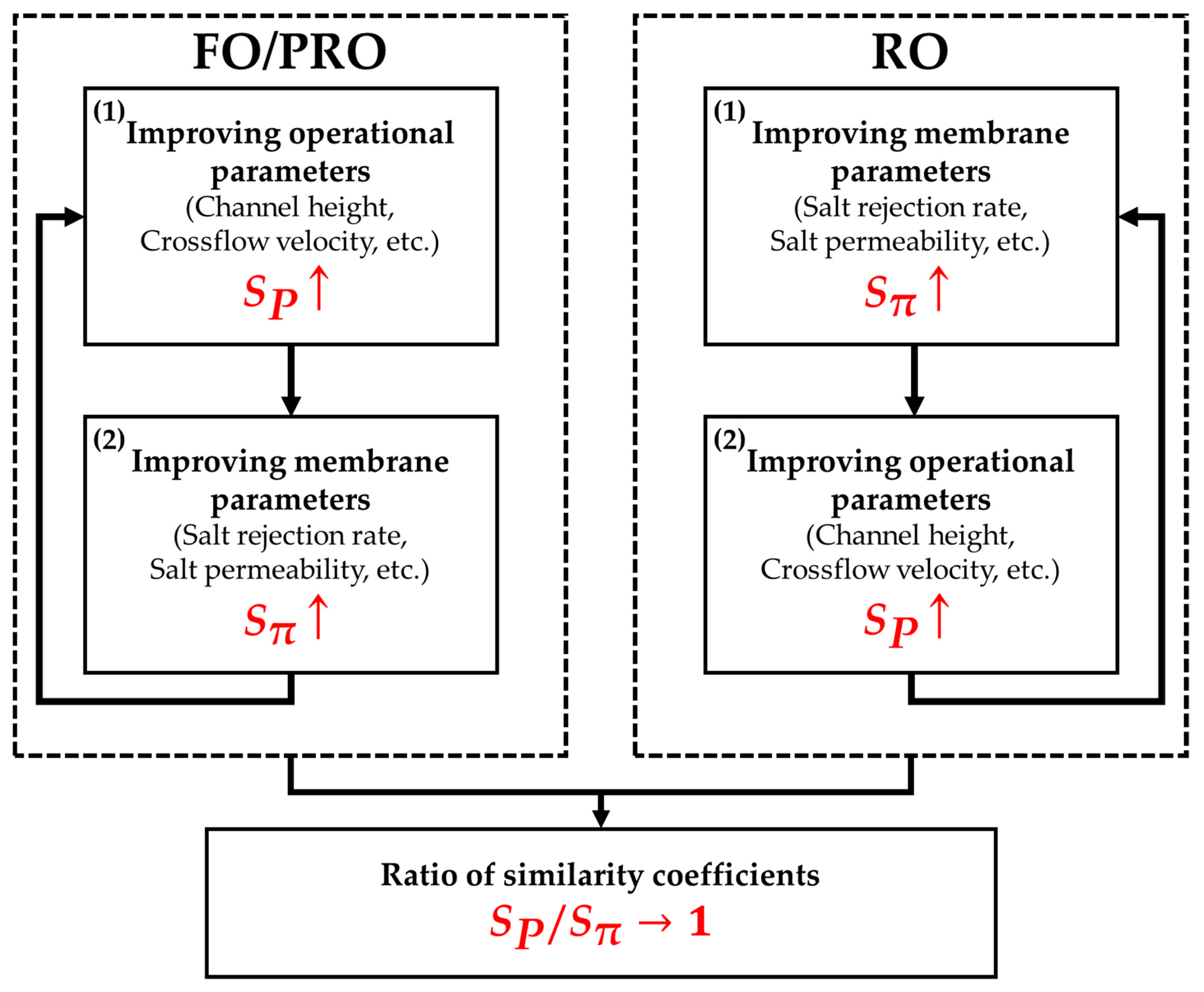
3.5. Practical Implications of Theoretical Analyses with Respect to Driving Pressures
4. Conclusions
- (I)
- and are related via the osmotic pressure difference in the boundary layer of the more concentrated side of a system, . When a given process is operated in FO/PRO modes, then . On the other hand, if the given process is RO.
- (II)
- Since in FO/PRO modes and in the RO mode, this means that for FO/PRO modes and for the RO mode. In addition, based on the postulate that specifies that the performance of actual membranes never exceeds that of the ideal membrane, in FO/PRO modes and in the RO mode. This contrast between FO/PRO and RO modes is critical for optimizing process parameters.
- (III)
- The point at which always belongs to the FO/PRO region due to the reflection coefficient that states that when . In other words, never becomes zero in the RO mode, theoretically.
- (IV)
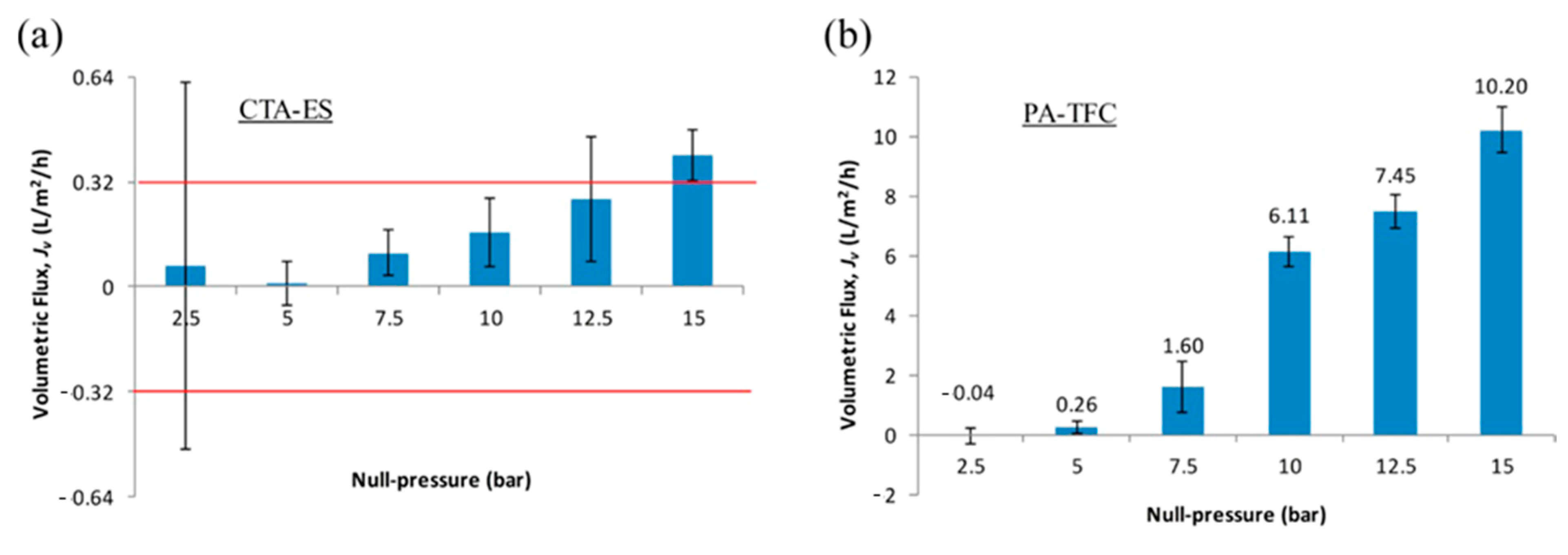
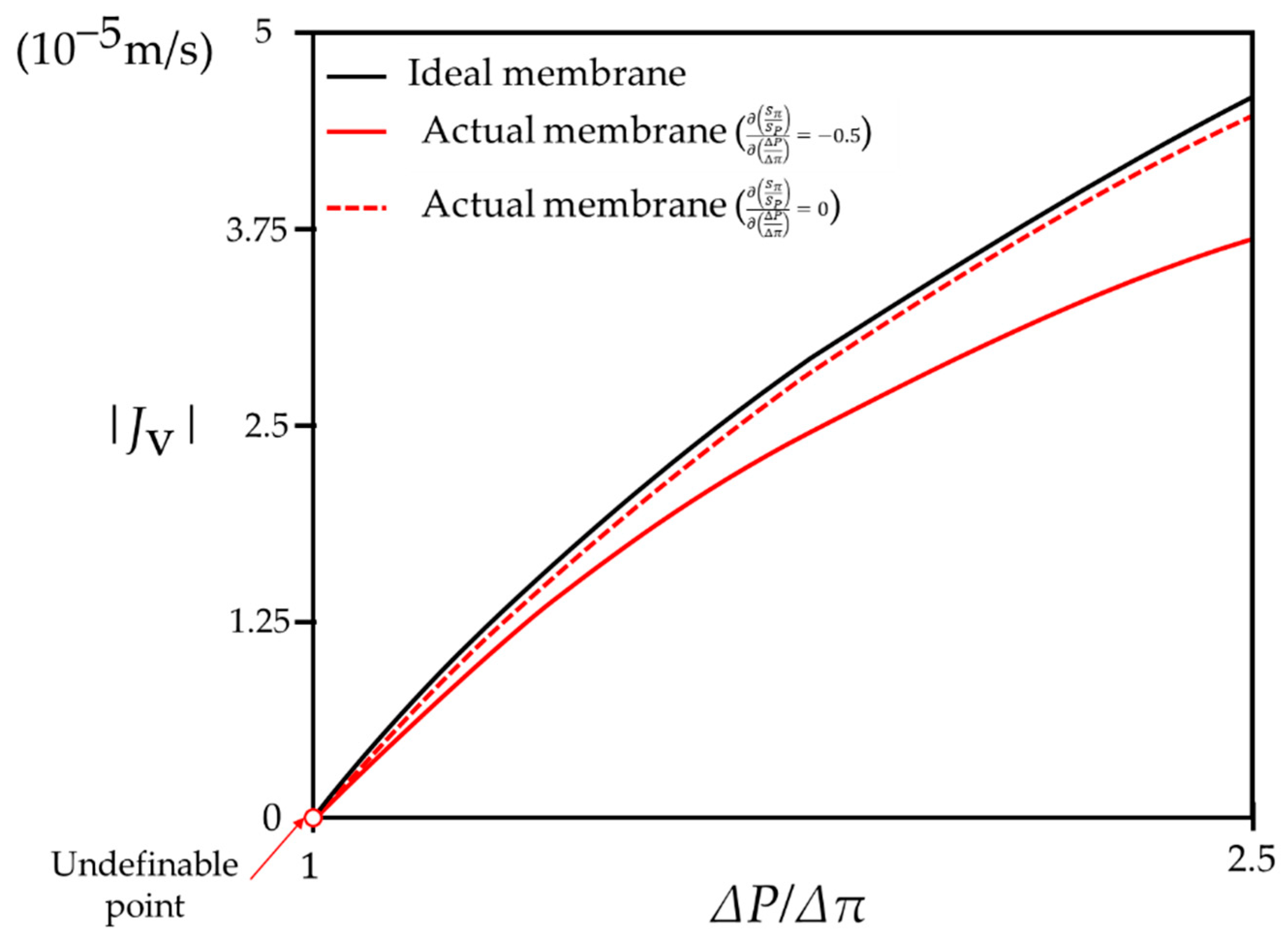
- There can exist a practical water flux limit for FO and PRO processes, unless severe dilutive external concentration polarization is assumed.
- (V)
- When , the value of the water flux made by the actual membranes cannot be defined because the value of the water flux at that point does not comply with the fundamental postulates.
- (VI)
- Given that always monotonically increases or decreases according to , the value of in desalting systems must be equal to or larger than a specific negative value (see Table 3).
- (VII)
- Within the range of , in principle, the value of is maintained as zero according to the preceding postulates. However, the practical values of within the range fluctuate to some extent because of the presence of membrane parameters.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclatures
| The salt permeability of a semi-permeable membrane (g/mol s) | |
| The structure parameter of a semi-permeable membrane (m) | |
| Rejection rate of a semi-permeable membrane (-) | |
| Temperature (K) | |
| External hydraulic pressure (Pa) | |
| The diffusivities defined in membrane-based desalting systems (m2/s) | |
| The diffusivities in membrane-based desalting systems when the transported variable is the driving pressures (m2/s) | |
| The mass transfer coefficients in membrane-based desalting systems (m3/m2 s) | |
| The similarity coefficients bridging the pseudo-osmotic pressures and the bulk osmotic pressures (-) | |
| The similarity coefficients bridging the pseudo-osmotic pressures and the bulk osmotic pressures (-) | |
| Arbitrary coefficients bridging the pseudo-driving pressures and the solute concentration (N m/mol) | |
| Transported variables of membrane-based desalting systems | |
| Solute concentration in membrane-based desalting systems (mol/m3) | |
| Driving pressures in membrane-based desalting systems (Pa) | |
| Distance from the surface of a semi-permeable membrane (m) | |
| Dimensionless distance from the surface of a semi-permeable membrane to the end of a boundary layer (-) | |
| Water flux in membrane-based desalting systems (m3/m2 s) | |
| Salt flux in membrane-based desalting systems (g/m2 s) | |
| Greek symbols | |
| Osmotic pressure (Pa) | |
| Length of a boundary layer in the more concentrated side of the membrane-based desalting systems (m) | |
| Arbitrary pressure existing in the less concentrated side of membrane-based desalting systems (Pa) | |
| The reflection coefficient of membrane-based desalting systems (-) The diffusive and convective mass transfer coefficient applied to the salt flux (g/mol s) | |
| Subscripts and superscripts | |
| The transported variable of a system is the solute concentration | |
| The transported variable of a system is the driving pressure (specific energy) | |
| A more concentrated side of membrane-based desalting systems | |
| A less concentrated side of membrane-based desalting systems | |
| The solute concentration at the semi-permeable membrane surface | |
| The solute concentration in the bulk more concentrated region | |
| Pseudo-driving pressures | |
| The ideal system with the ideal semi-permeable membrane | |
| The actual system with the actual semi-permeable membrane | |
Appendix A. Justification for the Equality between the Concentration-Based Differential Equation and the Pressure-Based Differential Equation
Appendix B. Brief Derivation for the Water Flux with Respect to Driving Pressures
Appendix C. Brief Explanation on a Notation for the Mass Transfer Coefficient,
References
- Chae, S.H.; Kim, J.; Kim, Y.M.; Kim, S.-H.; Kim, J.H. Economic analysis on environmentally sound brine disposal with RO and RO-hybrid processes. Desalin. Water Treat. 2017, 78, 1–11. [Google Scholar] [CrossRef]
- Lee, C.; Chae, S.H.; Yang, E.; Kim, S.; Kim, J.H.; Kim, I.S. A comprehensive review of the feasibility of pressure retarded osmosis: Recent technological advances and industrial efforts towards commercialization. Desalination 2020, 491. [Google Scholar] [CrossRef]
- Seo, J.; Kim, Y.M.; Chae, S.H.; Lim, S.J.; Park, H.; Kim, J.H. An optimization strategy for a forward osmosis-reverse osmosis hybrid process for wastewater reuse and seawater desalination: A modeling study. Desalination 2019, 463, 40–49. [Google Scholar] [CrossRef]
- Touati, K.; Tadeo, F.; Chae, S.H.; Kim, J.H.; Alvarez-Silva, O. Pressure Retarded Osmosis: Renewable Energy Generation and Recovery; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Chae, S.H.; Seo, J.; Kim, J.; Kim, Y.M.; Kim, J.H. A simulation study with a new performance index for pressure-retarded osmosis processes hybridized with seawater reverse osmosis and membrane distillation. Desalination 2018, 444, 118–128. [Google Scholar] [CrossRef]
- Kramer, E.M.; Myers, D.R. Osmosis is not driven by water dilution. Trends Plant Sci. 2013, 18, 195–197. [Google Scholar] [CrossRef] [PubMed]
- Achilli, A.; Childress, A.E. Pressure retarded osmosis: From the vision of Sidney Loeb to the first prototype installation Review. Desalination 2010, 261, 205–211. [Google Scholar] [CrossRef]
- Xu, Y.; Peng, X.; Tang, C.Y.; Fu, Q.S.; Nie, S. Effect of draw solution concentration and operating conditions on forward osmosis and pressure retarded osmosis performance in a spiral wound module. J. Membr. Sci. 2010, 348, 298–309. [Google Scholar] [CrossRef]
- Blankert, B.; Kim, Y.; Vrouwenvelder, H.; Ghaffour, N. Facultative hybrid RO-PRO concept to improve economic performance of PRO: Feasibility and maximizing efficiency. Desalination 2020, 478. [Google Scholar] [CrossRef]
- Benjamin, J.; Arias, M.E.; Zhang, Q. A techno-economic process model for pressure retarded osmosis based energy recovery in desalination plants. Desalination 2020, 476. [Google Scholar] [CrossRef]
- Henry, C.J.; Brant, J.A. Influence of membrane characteristics on performance in soil-membrane-water subsurface desalination irrigation systems. J. Water Process Eng. 2019, 32. [Google Scholar] [CrossRef]
- Bacchin, P. Colloid-interface interactions initiate osmotic flow dynamics. Colloids Surf. A Physicochem. Eng. Asp. 2017, 533, 147–158. [Google Scholar] [CrossRef] [Green Version]
- Martin, J.T.; Kolliopoulos, G.; Papangelakis, V.G. An improved model for membrane characterization in forward osmosis. J. Membr. Sci. 2019. [Google Scholar] [CrossRef]
- Abdelkader, B.; Sharqawy, M.H. Temperature Effects and Entropy Generation of Pressure Retarded Osmosis Process. Entropy 2019, 21, 1158. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Zhou, Z.; Li, J.; Tang, Q.; Hu, Y. Investigation of the reduced specific energy consumption of the RO-PRO hybrid system based on temperature-enhanced pressure retarded osmosis. J. Membr. Sci. 2019, 581, 439–452. [Google Scholar] [CrossRef]
- Sharqawy, M.H.; Banchik, L.D.; Lienhard, J.H. Effectiveness–mass transfer units (ε–MTU) model of an ideal pressure retarded osmosis membrane mass exchanger. J. Membr. Sci. 2013, 445, 211–219. [Google Scholar] [CrossRef]
- He, W.; Wang, Y.; Shaheed, M.H. Modelling of osmotic energy from natural salt gradients due to pressure retarded osmosis: Effects of detrimental factors and flow schemes. J. Membr. Sci. 2014, 471, 247–257. [Google Scholar] [CrossRef]
- Nelson, P.C. Biological Physics: Energy, Information, Life; W. H. Freeman: New York, NY, USA, 2004. [Google Scholar]
- Granik, V.T.; Smith, B.R.; Lee, S.C.; Ferrari, M. Osmotic Pressures for Binary Solutions of Non-electrolytes. Biomed. Microdevices 2002, 4, 309–321. [Google Scholar] [CrossRef]
- Huang, H.-C.; Xie, R. New Osmosis Law and Theory: The New Formula that Replaces van’t Hoff Osmotic Pressure Equation. arXiv 2012, arXiv:1201.0912. [Google Scholar]
- Wilson, A.D.; Stewart, F.F. Deriving osmotic pressures of draw solutes used in osmotically driven membrane processes. J. Membr. Sci. 2013, 431, 205–211. [Google Scholar] [CrossRef]
- Luo, Y.; Roux, B. Simulation of Osmotic Pressure in Concentrated Aqueous Salt Solutions. J. Phys. Chem. Lett. 2009, 1, 183–189. [Google Scholar] [CrossRef]
- Oh, Y.; Lee, S.; Elimelech, M.; Lee, S.; Hong, S. Effect of hydraulic pressure and membrane orientation on water flux and reverse solute flux in pressure assisted osmosis. J. Membr. Sci. 2014, 465, 159–166. [Google Scholar] [CrossRef]
- Blandin, G.; Myat, D.T.; Verliefde, A.R.D.; Le-Clech, P. Pressure assisted osmosis using nanofiltration membranes (PAO-NF): Towards higher efficiency osmotic processes. J. Membr. Sci. 2017, 533, 250–260. [Google Scholar] [CrossRef]
- Brian, P. Mass Transport in Reverse Osmosis; Merten, Ed.; MIT Press: Cambridge, MA, USA, 1966. [Google Scholar]
- Basdmadjian, D. Mass Transfer Principles and Applications; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Michaels, A.S. New separation technique for the CPI. Chem. Eng. Prog. 1968, 64, 31–43. [Google Scholar]
- Wijmans, J.G.; Baker, R.W. The solution-diffusion model: A review. J. Membr. Sci. 1995, 107, 1–21. [Google Scholar] [CrossRef]
- Bird, R.B.; Stewart, W.E.; Lightfoot, E.N. Transport Phenomena, 2nd ed.; JohnWiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Brian, P.L.T. Concentration polarization in reverse osmosis desalination with variable flux and incomplete salt rejection. IEc Fundam. 1965, 4, 439–445. [Google Scholar] [CrossRef]
- Sourirajan, S.K.S. Concentration Polarization Effects in Reverse Osmosis Using Porous Cellulose Acetate Membranes. L Ec Process Des. Dev. 1968, 7, 41–48. [Google Scholar]
- Cohen-Tanugi, D.; McGovern, R.K.; Dave, S.H.; Lienhard, J.H.; Grossman, J.C. Quantifying the potential of ultra-permeable membranes for water desalination. Energy Environ. Sci. 2014, 7, 1134–1141. [Google Scholar] [CrossRef] [Green Version]
- World Health Organization. Total Dissolved Solids in Drinking-Water: Background Document for Development of WHO Guidelines for Drinking-Water Quality; WHO: Geneva, Switzerland, 2003. [Google Scholar]
- Lim, S.J.; Kim, Y.M.; Park, H.; Ki, S.; Jeong, K.; Seo, J.; Chae, S.H.; Kim, J.H. Enhancing accuracy of membrane fouling prediction using hybrid machine learning models. Desalin. Water Treat. 2019, 146, 22–28. [Google Scholar] [CrossRef]
- Koutsou, C.P.; Yiantsios, S.G.; Karabelas, A.J. Direct numerical simulation of flow in spacer-filled channels: Effect of spacer geometrical characteristics. J. Membr. Sci. 2007, 291, 53–69. [Google Scholar] [CrossRef]
- Ruiz-García, A.; Nuez, I. Performance Assessment of SWRO Spiral-Wound Membrane Modules with Different Feed Spacer Dimensions. Processes 2020, 8, 692. [Google Scholar] [CrossRef]
- Haidari, A.H.; Heijman, S.G.J.; van der Meer, W.G.J. Optimal design of spacers in reverse osmosis. Sep. Purif. Technol. 2018, 192, 441–456. [Google Scholar] [CrossRef]
- Kim, J.; Jeong, K.; Park, M.; Shon, H.; Kim, J. Recent Advances in Osmotic Energy Generation via Pressure-Retarded Osmosis (PRO): A Review. Energies 2015, 8, 11821–11845. [Google Scholar] [CrossRef] [Green Version]
- Chae, S.H.; Kim, Y.M.; Park, H.; Seo, J.; Lim, S.J.; Kim, J.H. Modeling and Simulation Studies Analyzing the Pressure-Retarded Osmosis (PRO) and PRO-Hybridized Processes. Energies 2019, 12, 243. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Z.L.; Chung, T.-S. Mass transport of various membrane configurations in pressure retarded osmosis (PRO). J. Membr. Sci. 2017, 537, 160–176. [Google Scholar] [CrossRef]
- Atkins, P.W.; Julio, D.P. Atkins’ Physical Chemistry, 8th ed.; W.H. Freeman: New York, NY, USA, 2006. [Google Scholar]
- Kargol, A. Modified Kedem–Katchalsky equations and their applications. J. Membr. Sci. 2000, 174, 43–53. [Google Scholar] [CrossRef]
- Kedem, O.; Katchalsky, A. Thermodynamics analysis of the permeability of biological membranes to non-electrolytes. Biochim. Et Biophys. Acta 1958, 27, 229–246. [Google Scholar] [CrossRef]
- Pietruszka, M.; Jarzyńska, M. Derivation of Practical Kedem Katchalsky Equations for Membrane Substance Transport. Old New Concepts Phys. 2008, 5, 459–474. [Google Scholar] [CrossRef] [Green Version]
- Spiegler, K.S.; Kedem, O. Thermodynamics of hyperfiltration (reverse osmosis) Criteria for efficient membranes. Desalination 1966, 1, 311–326. [Google Scholar] [CrossRef]
- Ahmed, F.N. Modified Spiegler-Kedem Model to Predict the Rejection and Flux of Nanofiltration Processes at High NaCl Concentrations. Master’s Thesis, University of Ottawa, Ottawa, ON, Canada, 2013. [Google Scholar]
- Attarde, D.; Jain, M.; Gupta, S.K. Modeling of a forward osmosis and a pressure-retarded osmosis spiral wound module using the Spiegler-Kedem model and experimental validation. Sep. Purif. Technol. 2016, 164, 182–197. [Google Scholar] [CrossRef]
- Field, R.; Wu, J.J. On boundary layers and the attenuation of driving forces in forward osmosis and other membrane processes. Desalination 2018, s429, 167–174. [Google Scholar] [CrossRef]
- Morrow, C.P.; Childress, A.E. Evidence, Determination, and Implications of Membrane-Independent Limiting Flux in Forward Osmosis Systems. Environ. Sci. Technol. 2019, 53, 4380–4388. [Google Scholar] [CrossRef] [PubMed]
- Bui, N.-N.; Arena, J.T.; McCutcheon, J.R. Proper accounting of mass transfer resistances in forward osmosis: Improving the accuracy of model predictions of structural parameter. J. Membr. Sci. 2015, 492, 289–302. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Zhang, M.; Liu, Y.; Xiao, Q.; Xu, S. Quantitative evaluation of concentration polarization under different operating conditions for forward osmosis process. Desalination 2016, 398, 106–113. [Google Scholar] [CrossRef]
- Wu, J.J.; Field, R.W. On the understanding and feasibility of “Breakthrough” Osmosis. Sci. Rep. 2019, 9, 16464. [Google Scholar] [CrossRef] [Green Version]
- Nagy, E.; Hegedüs, I.; Tow, E.W.; Lienhard, V.J.H. Effect of fouling on performance of pressure retarded osmosis (PRO) and forward osmosis (FO). J. Membr. Sci. 2018, 565, 450–462. [Google Scholar] [CrossRef]
- Nagy, E. A general, resistance-in-series, salt- and water flux models for forward osmosis and pressure-retarded osmosis for energy generation. J. Membr. Sci. 2014, 460, 71–81. [Google Scholar] [CrossRef]
- Field, R.W.; Wu, J.J. Mass transfer limitations in forward osmosis: Are some potential applications overhyped? Desalination 2013, 318, 118–124. [Google Scholar] [CrossRef]
- Yip, N.Y.; Tiraferri, A.; Phillip, W.A.; Schiffman, J.D.; Hoover, L.A.; Kim, Y.C.; Elimelech, M. Thin-film composite pressure retarded osmosis membranes for sustainable power generation from salinity gradients. Environ. Sci. Technol. 2011, 45, 4360–4369. [Google Scholar] [CrossRef]
- Kook, S.; Swetha, C.D.; Lee, J.; Lee, C.; Fane, T.; Kim, I.S. Forward Osmosis Membranes under Null-Pressure Condition: Do Hydraulic and Osmotic Pressures Have Identical Nature? Environ. Sci. Technol. 2018, 52, 3556–3566. [Google Scholar] [CrossRef] [PubMed]
- Zeghadnia, L.; Robert, J.L.; Achour, B. Explicit solutions for turbulent flow friction factor: A review, assessment and approaches classification. Ain Shams Eng. J. 2019, 10, 243–252. [Google Scholar] [CrossRef]
- Zavitsas, A.A. Properties of Water Solutions of Electrolytes and Nonelectrolytes. J. Phys. Chem. B 2001, 105, 7805–7817. [Google Scholar] [CrossRef]
- Davenport, D.M.; Deshmukh, A.; Werber, J.R.; Elimelech, M. High-Pressure Reverse Osmosis for Energy-Efficient Hypersaline Brine Desalination: Current Status, Design Considerations, and Research Needs. Environ. Sci. Technol. Lett. 2018, 5, 467–475. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value of (FO) | Value of (PRO) | Reference |
|---|---|---|
| 0 (Assumed that ) | [52] | |
| 0.0823 | 0.0724 | [53] |
| 0.3874 | 0.6854 | [50] |
| 0.34 | - | [54] |
| 0.2830 | 0.8852 | [55] |
| - | 0.4329 | [56] |
| Process Types | Conditions | Condition Setting |
|---|---|---|
| FO/PRO | 1.2 | |
| 1.0 | ||
| 0.579 | ||
| 0 | ||
| RO | 0.99 | |
| −0.022 |
| Constraints | FO/PRO | RO |
|---|---|---|
| First constraint (Pseudo-Pressure) | ||
| Second constraint (Similarity) | ||
| Third constraint (Monotonic) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chae, S.H.; Kim, J.H. Theoretical Analysis of a Mathematical Relation between Driving Pressures in Membrane-Based Desalting Processes. Membranes 2021, 11, 220. https://doi.org/10.3390/membranes11030220
Chae SH, Kim JH. Theoretical Analysis of a Mathematical Relation between Driving Pressures in Membrane-Based Desalting Processes. Membranes. 2021; 11(3):220. https://doi.org/10.3390/membranes11030220
Chicago/Turabian StyleChae, Sung Ho, and Joon Ha Kim. 2021. "Theoretical Analysis of a Mathematical Relation between Driving Pressures in Membrane-Based Desalting Processes" Membranes 11, no. 3: 220. https://doi.org/10.3390/membranes11030220
APA StyleChae, S. H., & Kim, J. H. (2021). Theoretical Analysis of a Mathematical Relation between Driving Pressures in Membrane-Based Desalting Processes. Membranes, 11(3), 220. https://doi.org/10.3390/membranes11030220