
EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting

Abstract
:1. Introduction
2. Materials and Methods
2.1. The Dimensions of the Entire Structure and the Working Principle of Double-Side-Flip Plough Ditching Device
2.1.1. Dimensions of the Entire Structure
2.1.2. Working Principle of Double-Side-Flip Plough Ditching Device
2.2. Planting Agronomic Requirements
2.3. Design Analysis of Key Mechanisms
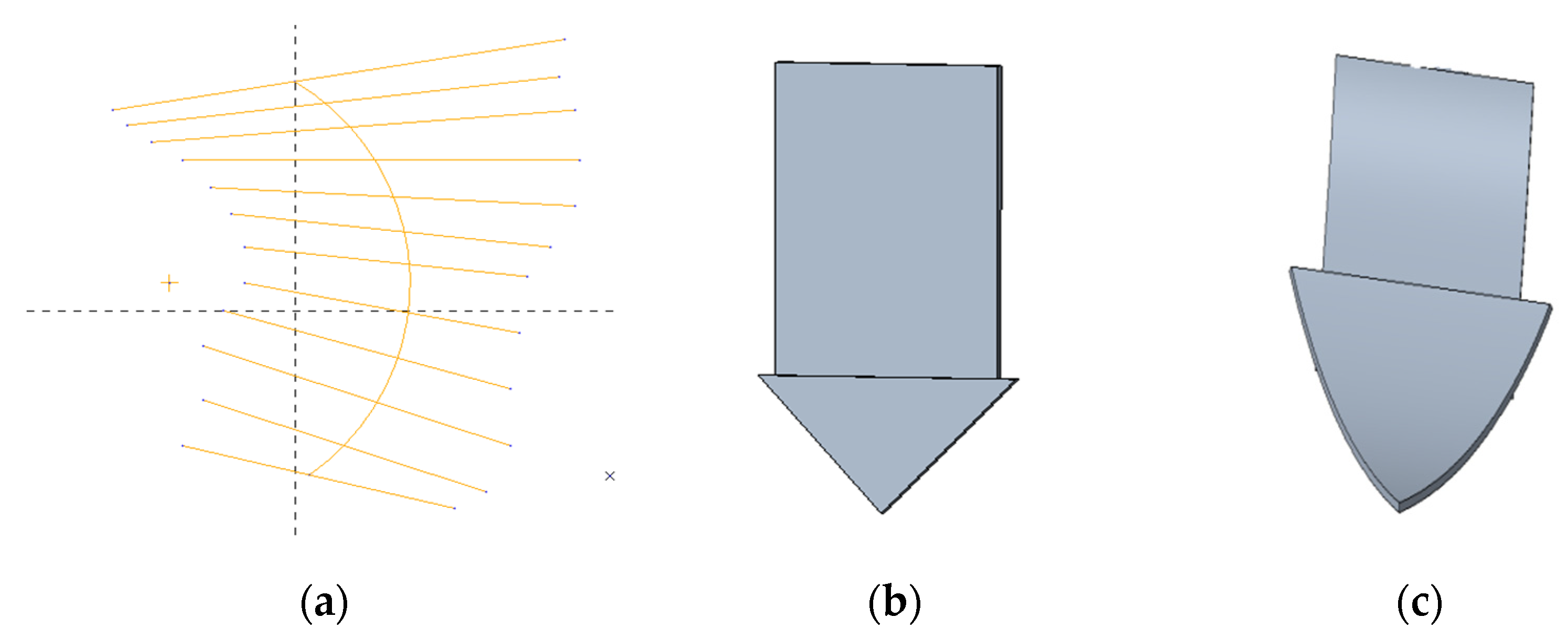
2.3.1. Design of Double-Flip Plough Ditching Device with a Tilting-Plough Blade
2.3.2. Plough Body Parameter Design
2.4. Discrete Element Simulation Analysis
2.4.1. Establishment of Mechanical Models
2.4.2. Parameter Calibration
- Gj—shear modulus of particle, Pa;
- Vj—Poisson’s ratio of particle, %;
- Ej—elastic modulus of particle, Pa.
2.4.3. Calibration Model
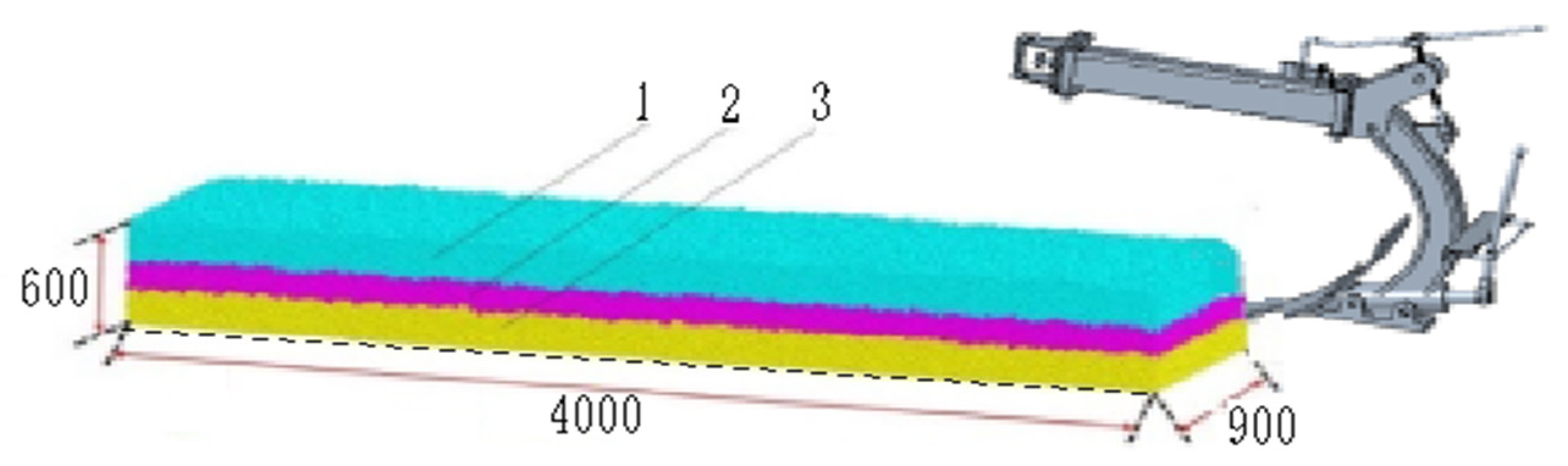
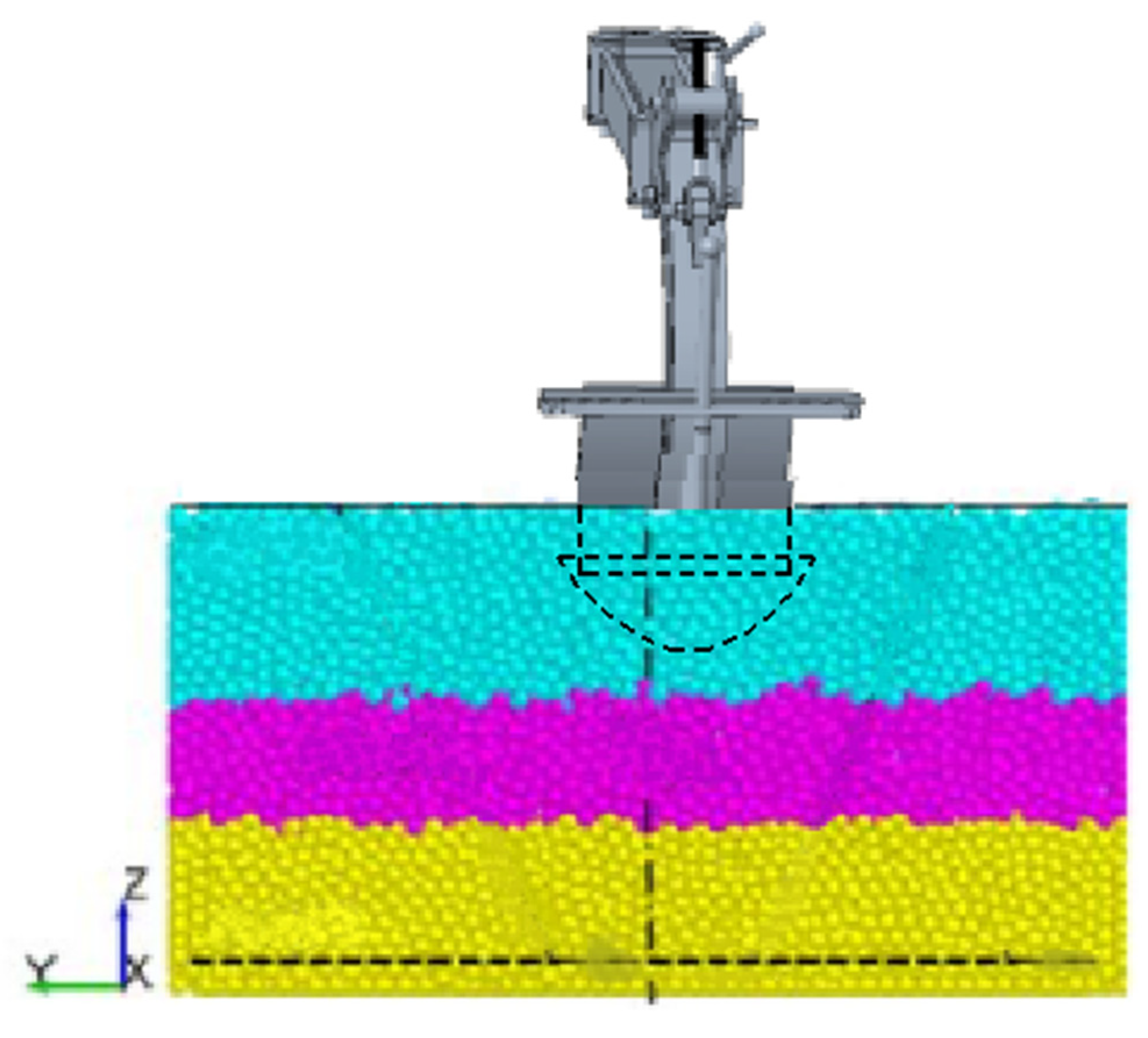
2.4.4. Establishment of Discrete Element Model for the Trenching Operation of the Trenching Plough
3. Results
3.1. Single Factor Analysis of Simulation Data
3.2. Orthogonal Test
3.2.1. Test Design
3.2.2. Establishment of the Regression Model and Analysis of Variance
3.2.3. Analysis of the Effects of Interaction
3.2.4. Optimization of the Parametric Model
4. Discussion
5. Conclusions
- (1)
- An EDEM discrete element simulation model was established in this paper. The simulation results show that the traction resistance of the plough body was affected by the operating speed. The traction resistance increased linearly in low-speed stage and exponentially in the high-speed stage along with an increase in the operating speed. As the simulation speed increased from 0.9 m/s to 1.5 m/s, the traction resistance increased from 1751. 31 N to 2197. 31 N, which was 1.25 times than before. The increase trend gradually increased. It showed that speed had a significant influence on the traction resistance. With the increase in working speed, the traction resistance of the plough body and the corresponding power consumption increased significantly.
- (2)
- Using the stability coefficient of the ditching depth and the consistency coefficient of the trench bottom width as test indices, the speed and the angle of ditching were considered as impact factor. We used a Box–Behnken orthogonal experimental design method to establish a regression model between the test indices and factors, then analyzing the influence of each test index. Combining agronomic requirements and MATLAB’s optimal test factors, an optimized operational parameter combination was obtained. The forward speed was 0.9 m/s, the angle of ditching was 35°, and the stability coefficient of ditching depth and consistency coefficient of trench bottom’s width were 97.57% and 98.03%, respectively.
- (3)
- The field experiment showed that the evaluation indices of the performance of the adjustable ditching device’s performance were in line with the national standards and codonopsis pilosula’s planting agronomic requirements. The stability coefficients of the ditch depth and the compartment surface reached 94.67% and 97.53%, respectively, better than the industrial standards.
- (4)
- The paper showed that the adjustable small ditching plough has the characteristics of flexible performance, small power, energy saving, simple operation and convenient operation. The product’s application and promotion are relatively speedy.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Gan, L.; Sun, D.; Cheng, H. Design of 1FFSL-5 type shallow-deep flip plow. J. Agric. Mech. Res. 2018, 41, 136–138. [Google Scholar]
- Kumar, G.V.P.; Raheman, H. Automatic feeding mechanism of a vegetable transplanter. Int. J. Agric. Biol. Eng. 2012, 5, 20–27. [Google Scholar]
- Chen, Y. 2018 development report on mechanized production of vegetables in China. J. Chin. Agric. Mech. 2019, 40, 1–6. [Google Scholar]
- Liu, D.; Xie, F.; Ye, Q.; Ren, S.; Li, X.; Liu, M. Analysis and experiment on influencing factors on power of ditching parts for 1K-50 orchard ditching. Trans. CSAE 2019, 19–28. [Google Scholar]
- Hasimu, A.; Chen, Y. Soil disturbance and draft force of selected seed openers. Soil Tillage Res. 2014, 140, 48–54. [Google Scholar] [CrossRef]
- Jia, H.; Meng, F.; Liu, L.; Shi, S.; Zhao, J.; Zhuang, J. Biomimetic design and experiment of coreshare furrow opener. Trans. Chin. Soc. Agric. Mach. 2020, 51, 44–49. [Google Scholar]
- Wang, S.; Li, S.; Zhang, Y.; Zhang, C.; Chen, H.; Meng, L. Design and optimization of inclined helical ditching component for mountain orchard ditcher. Trans. CSAE 2019, 34, 11–22. [Google Scholar]
- Zhang, Y. Simulation and Experimental Study on Soil Throwing Performance of Reverse Rotary Tillage Fertilizing Seeder Based on Discrete Element Method. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2012. [Google Scholar]
- Kang, J.; Li, S.; Yang, X.; Liu, L.; Li, C. Experimental verification and simulation analysis on power consumption of disc type ditcher. Trans. CSAE 2016, 32, 8–15. [Google Scholar]
- Barr, J.B.; Desbiolles-Jack, M.A.; Fielke, J.M. Minimizing soil disturbance and reaction forces for high speed sowing using bentleg furrow openers. Biosyst. Eng. 2016, 151, 53–64. [Google Scholar] [CrossRef]
- Zhao, X.; Guo, H.; Zhang, J.; Yang, W.; Han, J. The status quo and development trend of dryland transplanter in Xinjiang. Xinjiang Rural. Mech. 2014, 4, 25–29. [Google Scholar]
- Zhang, H.; Su, D.; Liu, W.; Qiu, L. Development of Multi-directional Hydraulic Trenching Plow. Agric. Mech. Res. 2012, 8, 49–52. [Google Scholar]
- Liu, W.; Su, D.; Zhang, L. Development of Adjustable Small Ditching Plough. Jiaozuo Univ. Acta Geogr. Sin. 2011, 3, 103–105. [Google Scholar]
- Ding, Q.; Ge, S.; Ren, J. Characteristics of subsoiler traction and soil disturbance in paddy soil. Nongye Jixie Xuebao 2017, 48, 47–56,63. [Google Scholar]
- Liu, X.; Zhang, Q.; Liu, L. Optimization of soil contact surface of ship ditching device based on differential geometry and EDEM. Trans. Chin. Soc. Agric. Mach. 2019, 50, 59–69. [Google Scholar]
- Zeng, Z.; Ma, X.; Cao, X. Current situation and prospect of discrete element Method in agricultural engineering research. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–20. [Google Scholar]
- Liu, X. Design and Working Mechanism of Ditching Tillage Preparation Components of Rapeseed Direct-Seeding Machine. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, 2018. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | Technical Parameters |
|---|---|
| Hang way | Tractor traction type |
| Supporting power (Metric horsepower) | ≥30 |
| Machine weight (kg) | 60 |
| Outline dimensions (mm) Length × width × height | 450 × 300 × 390 |
| Ground speed (m/s) | 0.9–1.5 |
| Trenching depth (mm) | 80–100 |
| The stability coefficient of ditching depth (%) | ≥90% |
| Consistency coefficient of ditching bottom width (%) | ≥85% |
| Efficiency of operations (ha/h) | ≥0.5 |
| Leakage rate (%) | ≤4 |
| Parameter Attribute | Parameter | Value of Number |
|---|---|---|
| Soil particle properties | Density ρ/(kg/m³) | 2500 |
| Shear modulus G/Pa | 2.2 × 107 | |
| Poisson’s ratio v | 0.45 | |
| Soil particle radius r/mm | 5.5 | |
| Material properties of the plough body | Density ρ’/(kg/m³) | 7.8 × 10³ |
| Shear modulus G’/Pa | 7.0 × 1010 | |
| Poisson’s ratio v’ | 0.35 | |
| Interaction between plough and soil | Quiet friction factor of soil particles and particles μ1 | 0.45 |
| Dynamic friction factor between soil particles and particles μ2 | 0.21 | |
| Soil particle and particle collision recovery factor R1 | 0.11 | |
| Quiet friction factor between the soil particles and the plough μ3 | 0.3 | |
| Dynamic friction factor between soil particles and plough μ4 | 0.26 | |
| Impact recovery factor between the soil particles and the plough R2 | 0.2 | |
| Other parameters | Acceleration of gravity g/m·s−² | 9.8 |
| Deep ploughing of the plough h/mm | 80–100 | |
| Width of the plough L/mm | 260 | |
| Number of soil particles N/number | 450,000 |
| Level | Forward Speed X1/(m·s−1) | Angle between the Ditching Plough and the Ground X2(°) |
|---|---|---|
| −1 low level | 0.9 | 15 |
| 0 middle level | 1.2 | 30 |
| 1 high level | 1.5 | 45 |
| Test Number | Forward Speed | Angle | Stability Coefficient of Ditching Depth y1/(%) | Consistency Coefficient of Ditching bottom Width y2/(%) |
|---|---|---|---|---|
| 1 | 0 | 1 | 94.02 | 95.08 |
| 2 | 0 | −1 | 94.36 | 93.19 |
| 3 | 1 | 0 | 96.52 | 96.26 |
| 4 | 1 | −1 | 94.96 | 94.87 |
| 5 | 0 | 0 | 95.65 | 96.22 |
| 6 | −1 | 1 | 97.02 | 95.75 |
| 7 | 0 | 1 | 93.95 | 94.46 |
| 8 | 0 | 0 | 98.01 | 95.22 |
| 9 | 0 | −1 | 94.85 | 93.55 |
| 10 | 1 | 1 | 98.01 | 94.96 |
| 11 | −1 | 0 | 93.44 | 95.21 |
| 12 | −1 | −1 | 96.69 | 96.36 |
| 13 | −1 | 0 | 97.76 | 96.56 |
| 14 | 0 | 0 | 95.88 | 95.74 |
| Evaluation Indices | Source of Variance | Quadratic Sum | Degrees of Freedom | Mean Square | p | Significance |
|---|---|---|---|---|---|---|
| Stability coefficient of the ditching depth y1 (%) | model | 8.42 | 5 | 4.21 | 0.0172 | * |
| X1 | 0.21 | 1 | 0.41 | 0.6121 | ||
| X2 | 0.32 | 1 | 0.52 | 0.6014 | ||
| X1X2 | 4.19 | 1 | 6.67 | 0.0331 | * | |
| X12 | 0.44 | 1 | 0.72 | 0.3927 | ||
| X22 | 3.26 | 1 | 5.68 | 0.0124 | * | |
| Residual | 3.71 | 5 | - | - | ||
| Loss of quasi item | 3.02 | 3 | 5.02 | 0.0702 | ||
| Pure error | 0.69 | 2 | - | - | ||
| summation | 12.13 | 10 | - | - | ||
| Consistency coefficient of the ditching bottom width y2% | model | 16.48 | 5 | 8.52 | 0.0039 | ** |
| X1 | 4.55 | 1 | 16.43 | 0.0074 | ** | |
| X2 | 0.26 | 1 | 0.74 | 0.5703 | ||
| X1X2 | 1.44 | 1 | 4.61 | 0.2109 | ||
| X12 | 1.27 | 1 | 5.02 | 0.0922 | ||
| X22 | 8.96 | 1 | 30.63 | 0.0027 | ** | |
| Residual | 2.67 | 5 | - | - | ||
| Loss of quasi item | 0.91 | 3 | 0.86 | 0.6134 | ||
| Pure error | 1.76 | 2 | - | - | ||
| summation | 19.15 | 10 | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, D.; Gong, Y.; Zhang, X.; Yu, Q.; Zhang, X.; Chen, X.; Wang, Y. EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting. Agriculture 2022, 12, 1238. https://doi.org/10.3390/agriculture12081238
Liu D, Gong Y, Zhang X, Yu Q, Zhang X, Chen X, Wang Y. EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting. Agriculture. 2022; 12(8):1238. https://doi.org/10.3390/agriculture12081238
Chicago/Turabian StyleLiu, Dejiang, Yan Gong, Xuejun Zhang, Qingxu Yu, Xiao Zhang, Xiao Chen, and Yemeng Wang. 2022. "EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting" Agriculture 12, no. 8: 1238. https://doi.org/10.3390/agriculture12081238
APA StyleLiu, D., Gong, Y., Zhang, X., Yu, Q., Zhang, X., Chen, X., & Wang, Y. (2022). EDEM Simulation Study on the Performance of a Mechanized Ditching Device for Codonopsis Planting. Agriculture, 12(8), 1238. https://doi.org/10.3390/agriculture12081238