1. Introduction
In the global dairy farming, musculoskeletal disorder (MSD) symptoms in the neck, shoulder, and upper extremities among farmers pose an ongoing problem throughout the world [
1,
2,
3]. Using the work ability index (WAI) to study full-time dairy milkers [
4], Finnish researchers reported an overall decline in work ability of 39%, which was mainly caused by MSD. In Germany, an evaluation of temporary disability data found a high rate of work absenteeism for milking parlor operators, with MSD being the most prevalent diagnosis [
5]. Similarly, several Swedish studies found a higher frequency of work-related MSD among dairy farmers (principally among females) than in other occupations [
6].
These results do not agree with the expectations of the global dairy farming, which aimed to reduce MSD through the adoption of modern parlors that reduce the physical load of workers. Other aspects, such as social, organizational, and socio-economic factors, must be considered to fully explain the increasing trend of MSD symptoms. The dairy farming industry has changed. The number of dairy farms has decreased, whereas herd sizes have increased to satisfy milk production and consumer demands [
7]. These changes have led to increase: the working time; the number of cows milked per hour; the number of milking units per parlor; and the quantity of highly repetitive working routines, causing a general increase of manual labor, often performed in awkward working positions, that is a direct risk for back injuries and other MSD-related problems [
8,
9].
However, it is the general workload on the upper extremities, due by the fundamental tasks required by milking procedures, that represents the greatest contribution to the development of MSD [
10,
11]. Pinzke et al. [
12] found that the task “attaching of a milking group” involves the highest load for the biceps and flexor muscles (during the holding of the milking group and the attaching of the teat-cups), and they reported that high muscle loads and extreme positions and movements of the hand and forearm might contribute to the development of injuries among milkers. Stal et al. [
13] highlighted that high degrees of dorsiflexion and deviation of the wrist, combined with high values of muscle loads for the forearm, due to the holding of the milking group in one hand while attaching the four teat-cups to the cow udder, might contribute to injuries to the forearm, wrist, and hand. Cockburn et al. [
14], in a study aimed to analyze and improve the posture of milkers during milking procedures, reported that working conditions of each milker can be improved considering: the parlor type, the udder base height, the floor level, and his/her body height. Nevertheless, the authors proved that no ideal milking parlor can be designed because in any case, the distance between the cow and the milker always requires the milker to reach out and lift the milking group, thereby loading weight on shoulders, elbows, and wrists, and thus increasing the risks for the development of MSD. In this scenario, an improvement of the level of automation in milking procedures could be a feasible way to maintain high milk production and, at the same time, reduce the physical risks for milkers.
During a milking session, the milker follows a well-defined routine consisting of three main phases: (1) fore-stripping, cleaning of the teats and udder, control for any possible evidence of mastitis, disinfection and, after 40–60 s, drying of the teats; (2) attachment of the milking cluster; (3) disinfection of the teats at the end of each milking. The main characteristic of the milking routine is that each step is performed in sequence for all of the animals in a rack. Therefore, the milker is forced to move inside the milking pit, from beginning to end, to complete each step of the routine. While the cows on one side of the milking parlor are being milked, the milker begins the same routine on the animals positioned on the opposite side to optimize the timing for the entire process.
Before attaching each milking cluster, the milker must start the mechanical milking phase of the milking post. This phase is generally controlled by certain milking control units that collaborate with the other devices present in the milking post (e.g., milk meters, flow meters, automatic cluster removers; [
15]). The units monitor the phase of the milk ejection and automatically remove the milking clusters when the milk flow is found to be below a specific threshold (defined for the herd or for individual cows if the system allows for the identification of each cow in the herd). Furthermore, these units can simultaneously monitor the health of the cows [
16,
17,
18,
19,
20] by the use of specific sensors. The mechanical milking phase is generally initiated by pushing a “start” button, which is located on each control unit or in a separate location in the milking post that is more convenient for the milker. This repetitive movement is performed by the milker many times during a milking session and is part of the general workload of the milking procedure. As an example, on a farm with a medium-sized herd of 200 lactation cows that are milked twice per day, the milker could be forced to push the “start” button up to 400 times per day.
The adoption of vocal commands could be a method of reducing the general workload of milkers. The mechanical milking phase could be initiated by a milker via vocal demands instead of a physically repetitive action. This increased level of automation could reduce the general workload imposed by the milking procedure and thus improve the health conditions of dairy workers.
The aim of this study was to develop and test a device to provide the feature of “vocal commands” to activate the mechanical milking phase for each milking post in a conventional milking parlor.
2. Materials and Methods
2.1. Hardware Layout
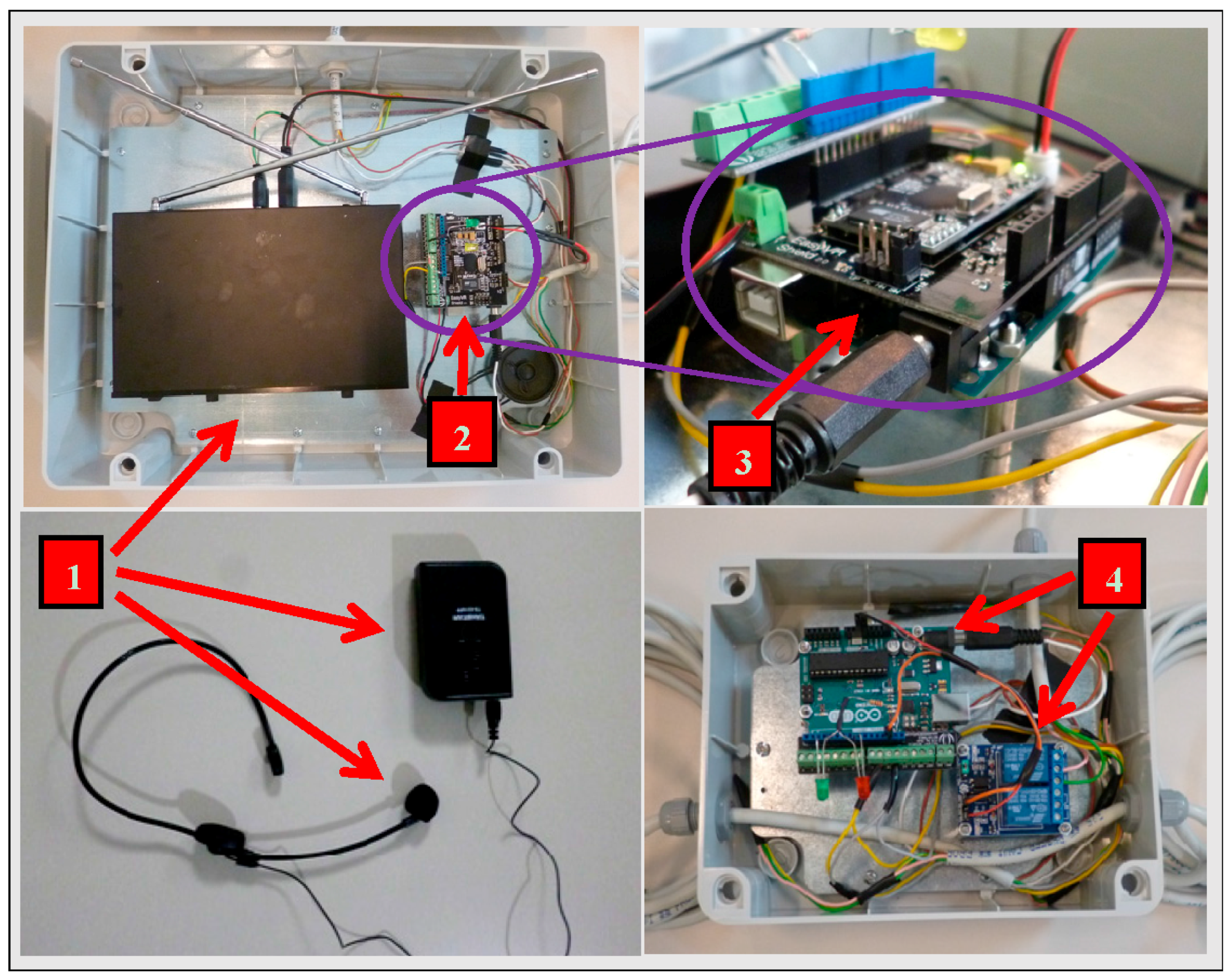
The layout of the electronic components used in the device is presented in
Figure 1 and
Figure 2. The layout included the following: (1) a behind-the-head headset unidirectional microphone coupled with a wireless transmitter and receiver (TS-6310 VHF Wireless Microphone—Guangdong Takstar Electronic Co, Huizhou, China); (2) a vocal recognition board (EasyVR—ROBOTECH S.r.l., Sarzana, La Spezia, Italy); (3) a main board (Arduino UNO—Arduino S.r.l., Scarmagno, Turin, Italy); and (4) a connection board for each milking post connected that included an Arduino UNO (Arduino S.r.l., Scarmagno, Turin, Italy) and a relay module (Sunfounder, Shenzhen City , China).
This hardware layout enabled the device to (a) acquire the vocal commands of the milker from any part of the milking pit through the wearable microphone and wireless connection provided by the Radio Frequency (RF) communication system; (b) transform the vocal commands of the milker into audio signals; (c) interpret the vocal commands of the milker through the recognition engine embedded in the vocal recognition board; (d) code the recognized command as a standard command message through the main board; (e) send this command to the milking posts through the main board; (f) decode the command messages received from the main board through the connection boards located near each milking post (and connected to the corresponding milking control unit by its relay module and the input provided by the unit for the external push button); and (g) execute the command received from the milker by generating the appropriate electrical spike through the relay of the specific connection board to which the command was addressed.
2.2. Software Development
Two software applications were developed according to a master/slave design model using the programming language of Arduino and its Integrated Development Environment (IDE—Arduino 1.5.7, Arduino S.r.l., Scarmagno, Turin, Italy). After a compilation procedure was performed by the IDE, these software applications were used as firmware in the Arduino boards. The first application (the master) was uploaded on the main board, and the second application (the slave) was used as firmware in each connection board. A specific set-up was used in each connection board, which enabled the software application to store the number of the milking post to which the specific connection board was connected. Flow diagrams of these software applications are presented in
Figure 3.
The first software application enabled the acquisition and decoding of the vocal commands of the milker. This application was constantly in a “listening mode”—making a continuous loop of a defined number of seconds [
21]. If a command was recognized by the vocal recognition board during this time window, the corresponding command was built and sent as a specific sequence of characters to all of the connection boards through a specialized software serial bus (built with the pins 10 and 11 of all of the Arduino boards).
The second software application performed a different task. This application was always in a “waiting” loop for messages received from the main board. When a message was received, this application (a) decoded the message; (b) checked whether the message was addressed to that specific milking post; and (c) in the case of correct correspondence, executed the command using the control pin in the relay module to generate an electric spike for the milking control unit (simulating in this way the pushing of the corresponding manual button).
Furthermore, to inform the milker of the current state of software tasks that were running, feedback was provided by the two software applications through colored LED and acoustic signals (i.e., “beeps”). These “beeps” were generated by specific software functions provided by a proprietary library of the voice recognition board and were physically realized by an 8 Ω acoustic speaker, which was directly controlled by the voice recognition board through a dedicated output. This feedback informed the milker about (a) the start of the “listening window,” in which the device was waiting for a vocal command; (b) the positive recognition of a vocal command made by the vocal recognition board; and (c) the execution of a vocal command made by a specific connection board.
2.3. Types of Vocal Commands
The vocal recognition board used in the device was able to manage two different types of customized vocal commands: speaker-dependent (SD) commands and speaker-independent (SI) commands.
The SD commands are vocal commands provided by each user. A single user must follow a procedure to train the board to recognize the user’s specific voice when a customized vocal command is given. In this procedure, the user must pronounce each word/utterance of the set of customized vocal commands (i.e., the word vocabulary necessary for the recognition task) at least two times. At the end of this training procedure, which was performed through a proprietary software application (EasyVR CommanderTM 3.8.0.0—ROBOTECH S.r.l., Sarzana, La Spezia, Italy), the resulting set of acoustic models is uploaded to the board. Consequently, the board is able to recognize the vocal commands of the user that has followed the procedure.
The SI commands are vocal commands not provided by a specific user. Through a proprietary software application (QuickT2SITM 3.1.14—ROBOTECH S.r.l., Sarzana, La Spezia, Italy), each word/utterance necessary to the recognition task is written and included in the word vocabulary. In a following step, each word/utterance of the vocabulary can be edited for pronunciation, and different settings can be selected (for example, the language model, acoustic model, and command phrase settings). At the end of this task, a customized word vocabulary is built and ready to be imported into the software application cited above (EasyVR CommanderTM 3.8.0.0) for the necessary uploading to the board. This final step allows the board to recognize each word/utterance of the set of vocal commands from any possible user. The resulting recognition accuracy is generally less than in the case of SD commands. Therefore, in this study, only SD commands were used to achieve the best possible recognition accuracy considering the noisy environment in which the recognition task is performed.
2.4. Vocal Command Structure
The functional command of the milking system controlled by the developed device was only the “start” of the milking procedure. As a result, (a) the “start” action was considered to be the action to perform at default; (b) the word “start” was omitted from the recognition task syntax; and (c) only the reference to the position of the milking post was used in the vocal command structure. Furthermore, the word “post” was added to each vocal command (e.g., “post one”, “post two”, “post three”, etc.; [
22]).
However, the acoustic models of the SD commands were built as singular utterances. The recognition task semantics were specified to receive one valid utterance during a single listening window for comparison with those included in the set of vocal commands. Italian was used as a language model, and Italian terms were used to build each utterance: “postazione” for the word “post” and the numbers “uno, due, tre, etc.” for the corresponding terms “one, two, three, etc.”
2.5. Experimental Design
The experimental tests involved four professional milkers (i.e., professional workers that have milked cows for at least three years). Before the start of the tests, a set of acoustic models of the SD commands was acquired for each milker through a specialized software application (EasyVR CommanderTM 3.8.0.0). At the end of this procedure (performed in a mildly quiet room), each milker was trained to pronounce each utterance included in the set of vocal commands using the same software application. This milker training procedure required the milker to pronounce each vocal command in sequence. A delay of a few seconds was used between utterances. The milker received feedback on the correct recognition of the last vocal command pronounced directly from the personal computer. At the end of the vocal commands included in the set, the milker restarted from the beginning, for a total of 30 repetitions.
Experimental tests were performed in the laboratory and in the milking parlor of a dairy farm. The milking parlor was a 6 + 6 herringbone milking system. Only one milking line (i.e., six milking posts) was connected to the developed device to allow in future studies the comparing of a fully automated milking line to a conventional milking line, in the same milking parlor. The same layout was used in the laboratory to yield comparable data. Six connection boards were connected, and the following vocal commands were used in the tests: “post one”, “post two”, “post three”, “post four”, “post five”, and “post six”.
In the laboratory, the experimental procedure consisted of a sequence of activities similar to those generally performed in the milking routine. Starting at the first milking post, the milker pronounced the first vocal command (i.e., “post one”) into the microphone after the acoustic “beep” provided by the device at the beginning of the listening window. If the utterance was correctly recognized by the device, the milker stayed in front of the first “milking post” for few seconds as a simulation of the attaching phase of the milking group. After that pause, the milker moved to the following simulated “milking post”. If the vocal command provided was not recognized, the milker moved to the following “milking post” assuming to have started the milking procedure of the previous “milking post” by a manual pushing of the “start” button. At the end of the “milking line”, the milker paused for a few minutes. After that pause, the milker restarted from the beginning of the “milking line”. This sequence of activities was repeated ten times. This number of repetitions was selected because it was equal to the number of milking “cycles” expected for the tests conducted in the milking parlor, which was estimated based on the number of available milking posts and milk cows of the dairy farm. The entire experimental procedure was repeated for each milker involved in the tests.
At the end of the laboratory tests, the same experimental procedure was performed by each milker in a milking parlor. The times spent to start the milking procedure, through the device and by the manual pushing of the “start” button, were recorded and compared. Each procedure was performed during an entire milking session. For all tests performed, a unique researcher followed the entire experimental session and recorded data.
2.6. Statistical Analysis
The performance of the device was evaluated based on the accuracy demonstrated in the vocal command recognition task and rated using the word error rate (WER—[
22,
23,
24]) according to the following formula:
where:
S is the number of substitutions,
D is the number of the deletions,
I is the number of the insertions, and
N is the number of words in the reference.
The vocal commands used in this study were acquired as singular utterances. Therefore, the classification of the result of the recognition task was as follows: (a) “correct” if the “vocal recognition board” correctly identified the vocal command pronounced by the milker; (b) “substitution” if the “vocal recognition board” mismatched the vocal command pronounced by the milker and the command selected from the set of vocal commands; and (c) “deletion” if the “vocal recognition board” did not match the vocal command pronounced by the milker with any command included in the set of vocal commands. As a consequence, for each result of the recognition task (a) no “insertion” was possible; (b) if a “substitution” occurred, then a “deletion” was automatically excluded (and vice versa); and (c) the number of words in the reference was always equal to 1. Therefore, the WER index was simplified according to the following formula:
Next, the obtained results were converted into a word recognition rate (WRR—[
12,
13,
14]) according to the following formula:
In the final step, all of the results were grouped based on the different cases evaluated in the study and calculated as percentages.
A statistical analysis of the results was performed. A mixed effects logistic regression model was used to evaluate the association between the %WRR and the explanatory variables considered. The statistical analysis was performed using R software (version 3.2.3, 2015, The R Foundation for Statistical Computing, Vienna, Austria), the package
lme4 (version 1.1-10—[
25]), and the
glmer procedure. The following linear model was fitted:
where:
Yijkr is the %WRR; β
n are coefficients of the linear model;
Pi is the effect of the location where the tests were conducted (
i = 1–2; 1 = laboratory; 2 = milking parlor);
Mj is the effect of the milker (
j = 1–4; 1 = milker one; 2 = milker two, etc.);
Ck(j) is the effect of the acquisition cycle performed (
k = 1–10; 1 = cycle one, 2 = cycle two, etc.) nested within milkers;
VCr(kj) is the effect of the vocal command (
j = 1–6; 1 = milking post one, 2 = milking post two, etc.) nested within cycles and milkers; and
eijkr is the residual error. The variables
Mj,
Ck(j), and
VCr(kj) were included in the statistical model as random effects.
Furthermore, the mean values of the time required to start the milking procedure using the device or the manual pushing of the “start” button were calculated. In order to check for significant differences between the mean values obtained, the
aov procedure of the package
stats (version 3.2.3—[
26]) was used.
4. Discussion
The device performed better on the vocal command recognition tasks in the laboratory than in the milking parlor. This finding was expected [
27,
28,
29]. Milking parlors often have significant background noises. These noises can be caused by the milking machine operations, the presence of animals, the activities of milkers, or other tasks performed on the farm close to the milking parlor that involve the use of noisy machines, such as tractors. The presence of these background noises can affect the performance of a speech recognition system [
24]. However, some strategies can be used to improve the performance of this type of system. For example, the recording of the acoustic models by the milkers could be performed directly in the milking parlor [
17,
19,
20] when the milking machine is working. Otherwise, many mathematical and/or statistical models could be used to improve the robustness of the recognition system in the presence of background noise [
22,
28,
30,
31,
32,
33,
34,
35]. Nevertheless, all these techniques improve the recognition accuracy in the case of stationary noise [
30] and they require more computational resources, which can affect the speed of the recognition task [
22]. Therefore, considering the field results obtained in this study and the characteristics of the noise of the milking parlor, one can conclude that no changes to the current layout of the device should be necessary.
The overall value of %WRR achieved for all of the tests performed (86.9%) was in agreement with the results obtained in similar published studies. For example Be et al. [
23], in a study carried out to develop an interface to control a robot using vocal commands, reported values of %WRR that varied between 86% and 93% on the basis of the different Spanish words considered to control the robot. These results were considered satisfactory by the authors because the recognition rates were maintained by the system in the range of 80% to 100% for all the cases investigated. Hirsch and Pearce [
30], in a study that evaluated the performances of a speech recognition system in different real noisy conditions, such as: a car, a street, a train station, an airport, a restaurant, and an exhibition hall reported values of %WRR that ranged between 54.94% and 87.77%. The lowest performances were achieved by the system when: the acoustic models were recorded in a “clean condition” (i.e., without a background noise), the level of noise was high, and the experimental conditions were characterized by non-stationary noises as was the case for the tests performed in this study. However, it is interesting to note that the overall performance achieved in this study was proportionally limited by milkers 2 and 3. This result could be explained considering that these milkers were of Indian mother tongue even though they were able to speak coherent Italian. Considering this fact, two possible improvements could be suggested in order to reach better performance: (a) setup the vocal recognition engine using the speaker’s mother tongue as a language model, even though the words included in the vocabulary are selected from another language and (b) use a set of vocal commands and language models equal to the speaker’s mother tongue, and if necessary, different options for milkers in the same milking parlor that are fluent in more than one language. Unfortunately, in our study, these potential improvements could not be evaluated because the hardware used for the recognition task did not support Indian language as a model language.
The time necessary to start a milking procedure was, on average, higher when vocal commands were used to interact with the milking system. However, in this study, each vocal command started with the word “postazione” (i.e., “milking post”). This word, theoretically, is not strictly necessary and could be deleted from each vocal command. In this way, less time would be necessary to start the milking procedure. Furthermore, during the tests, it was observed that sometimes milkers started to pronounce a vocal command before they had finished to prepare the milking group for the attachment phase. During the tests carried out, these actions were corrected by the researcher that was in the milking parlor. However, in a real use of the device, these actions could be allowed. Since the milker could interact with the milking unit without the need to have a hand free from a specific task, a reduction of the time necessary to start a milking procedure should be reached.
The use of the device enabled the milkers to start the mechanical milking phase through the use of vocal commands instead of a physically repetitive action. However, the device was used to control only one function of the milking system. Theoretically, using a different set of vocal commands, or building vocal commands with a more complex structure, could eventually result in other functions of the milking system being controlled by the device. For example, the milking control units of a milking system monitor the phase of milk ejection and enable the automatic removal of milking clusters when the milk flow is below a specific threshold defined for each cow. Nevertheless, in old milking parlors, the identification of each animal is not possible, and the use of a singular threshold for the entire herd could result in incorrect data for all of the animals. In these instances, the milker must oversee the milking procedure and start the removal procedure by pushing the “stop” button in the corresponding milking control unit. If this command is not provided by the milker within a short timeframe, a dangerous “over milking” can occur. An incorrect removal threshold for milk flow can also affect the initial phase of the milking procedure. If this value is too high and the milk flow of a specific cow at the starting of the milking is lower (for a specific time), then the milking group could be removed too early and a new attachment of the group could be required. To avoid such a situation, the milker can initiate the milking by selecting the “manual” mode on the milking group, but is then forced to come back to the same milking post to manually stop the milking (and remove the milking group) or select the “automatic” mode on the milking unit. In all of these unfavorable events, the milker is forced to perform additional work. Nevertheless, these cases could be managed via the use of vocal commands. Both the actions of “start” and “stop” and the setup of the milking units (“manual” or “automatic”) could be controlled by the device, changing the structure of the vocal commands, such as “Post one” + “Stop” (to stop the milking and remove the post one milking group) and “Post one” + “Manual” (to select the manual mode for post one). This modification could further increase the level of automation already reached by the tested device, allowing for a further reduction in the general workload of the milking procedure.
However, future studies will be necessary to identify and quantify the ergonomic improvements that the vocal commands feature can bring to milking procedures. In these studies, the reduction of the physical workload of milkers and the risk of MSD will be assessed.







{kind=link}
{kind=link}
{kind=link}