
Speed Optimization of Container Ship Considering Route Segmentation and Weather Data Loading: Turning Point-Time Segmentation Method


Abstract
:1. Introduction
2. Literature Review and Research Gaps
2.1. Literature Review
2.2. Research Gaps
- (1)
- At present, the research on ship speed optimization considering the actual weather influence on fixed routes between two ports is still immature, and the research on route segmentation and weather loading methods based on real-time weather has just started. Some studies segment the route only according to time steps [14,16], or segment after unordered clustering based on the ship’s historical navigation data [6,7], which leads to a large number of segments or difficulty controlling the number of segments. In addition, the dynamic correlation between real-time weather and ship speed is also less considered.
- (2)
- Some studies conduct ship daily speed optimization and verification based on ship navigation report data [3,4], but there are relatively few explorations on route segmentation and weather loading before sailing. Therefore, these studies usually validate the algorithms under the assumption that the route segmentation is known (the route is segmented by turning point (station) or by sailing time (one day) based on voyage reports), and that the weather conditions for each segment are known and fixed. On the one hand, segmentation of the route by turning point or time may result in large weather differences within each segment; on the other hand, before the ship sails, the daily distance the ship travels and the weather of each segment are usually unknown. Therefore, these problems cause some limitations and room for improvement in the practical application of this kind of research.
- (3)
- The existing studies usually solve the speed optimization problem only once [17,22], which will result in a gap between the theoretical calculation and the practical application, i.e., there is a difference between the optimized fuel consumption based on a specific set of weather and sea condition data in the theoretical calculation and the actual (simulated) fuel consumption obtained by the ship sailing at optimized speed. This is due to the change in weather and sea conditions encountered while the ship is sailing at the optimized speed compared to the beginning of the optimization.
2.3. Research Contributions
- (1)
- This study constructs an accurate and reliable ship main engine fuel consumption prediction model and shaft speed prediction model based on machine learning methods and model fusion ideas, thus realizing an effective trade-off between the accuracy and reliability of fuel consumption and shaft speed prediction in ship speed optimization. The constructed shaft speed prediction model solves the matching problem between the optimal ship speed and the optimal shaft speed in ship speed optimization and improves the practicality of the speed optimization results. The modeling method of this study provides a new way to obtain accurate and reliable ship fuel consumption and shaft speed in ship speed optimization.
- (2)
- This study proposes an iterative algorithm for route segmentation and weather loading-speed optimization, which solves the strong coupling problem between route segmentation, weather loading, and speed optimization. The proposed algorithm ensures the rationality of route segmentation, realizes the dynamic loading of weather data, and reduces the error between optimized fuel consumption and actual fuel consumption, thus reducing the gap between the theoretical research of speed optimization and the practical application of shipping companies. The optimization method of this study significantly improves the reliability and practicality of speed optimization in actual ship operation, achieves significant fuel-saving effects, and can provide effective technical means for shipping companies to achieve the goal of energy saving and emission reduction.
3. Model and Method
3.1. Prediction Models of Ship Main Engine Fuel Consumption and Shaft Speed
- (1)
- Li et al. [27] and Du et al. [23] suggest that the extremely randomized trees (ET) method [28], based on the principle of decision tree ensemble, has the highest prediction accuracy. The strategy used by the ET method to integrate decision trees is the bagging ensemble strategy, which essentially improves the model fitting performance by reducing the variance of the model. The ET method can reduce prediction errors and variance, and effectively prevent overfitting by combining different decision trees. Moreover, the comparison experiments on the prediction accuracy of multiple machine learning methods conducted on the modeling dataset of this study also confirm that the ET method has the highest fuel consumption prediction accuracy (see Appendix A for the specific comparison results). Therefore, the ET method is chosen as one of the methods to construct the fuel consumption prediction model in this study.
- (2)
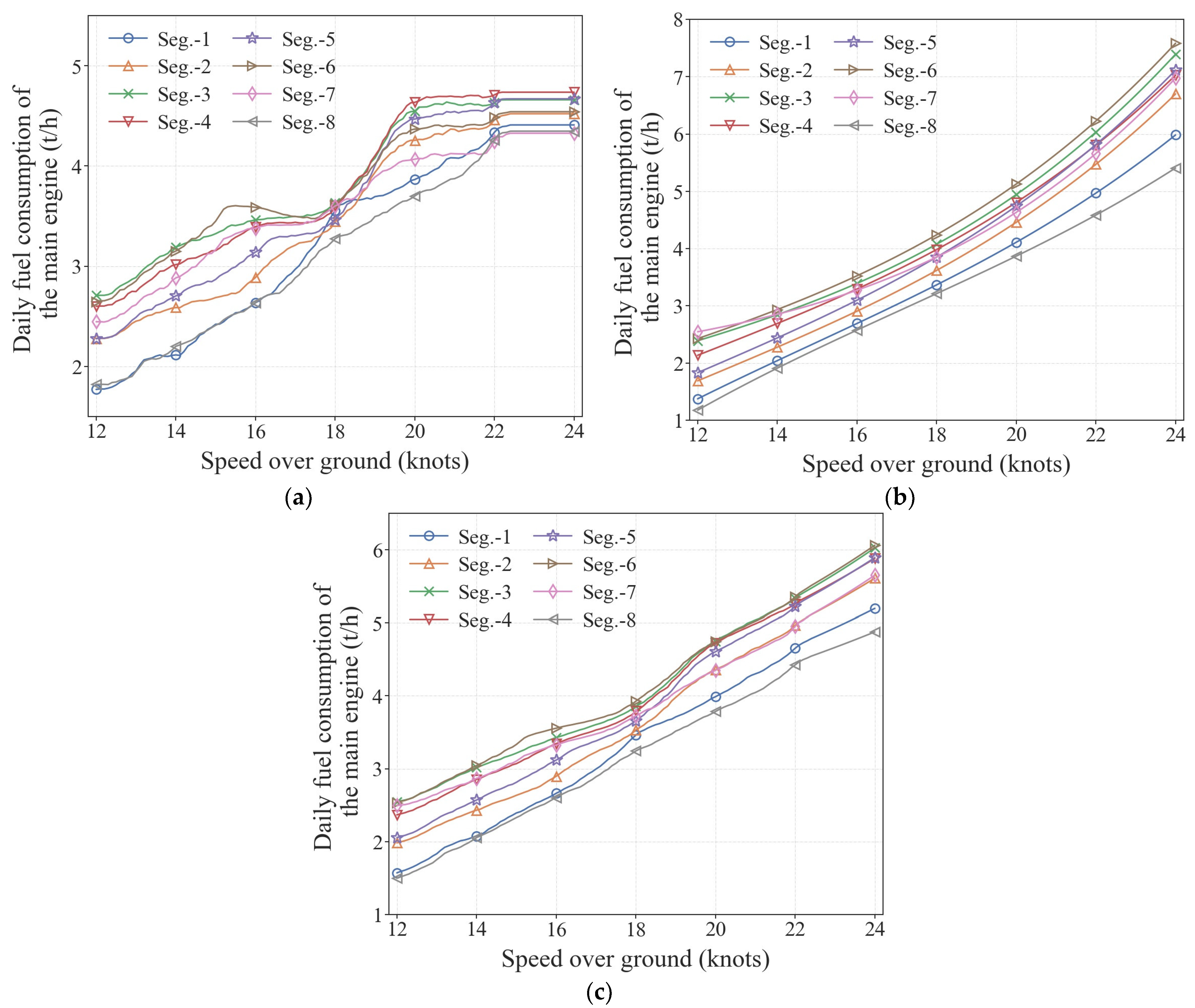
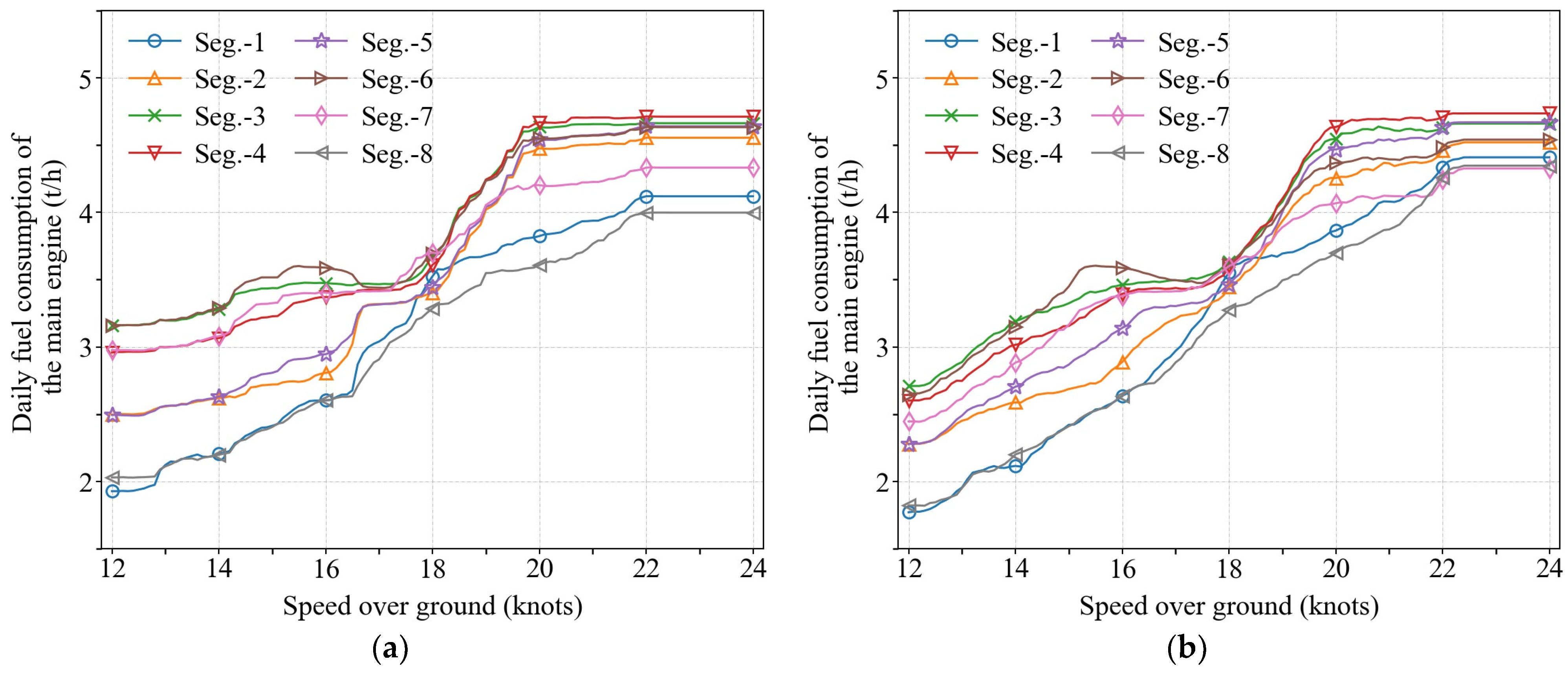
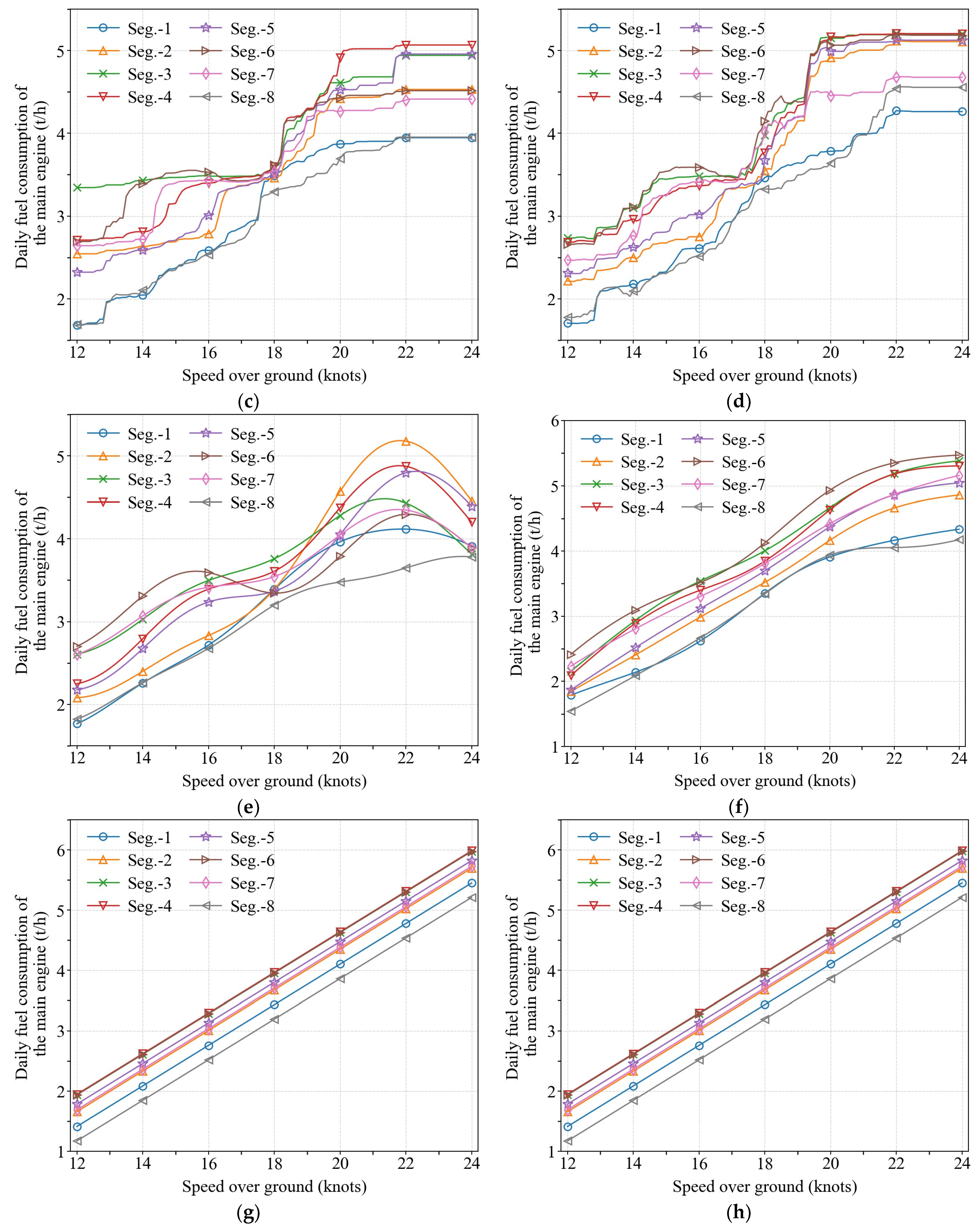
- The results of Yan et al. [4] indicate that there is a breakpoint phenomenon in the variation trend of ship fuel consumption with speed predicted by the decision tree ensemble model. Therefore, it is necessary to find a suitable way to solve this problem.
- (3)
- The third-order polynomial regression (PR) method can better reflect the approximate cubic relationship between ship speed and main engine fuel consumption, and the predicted variation trend of ship fuel consumption with speed is relatively smooth and reliable.
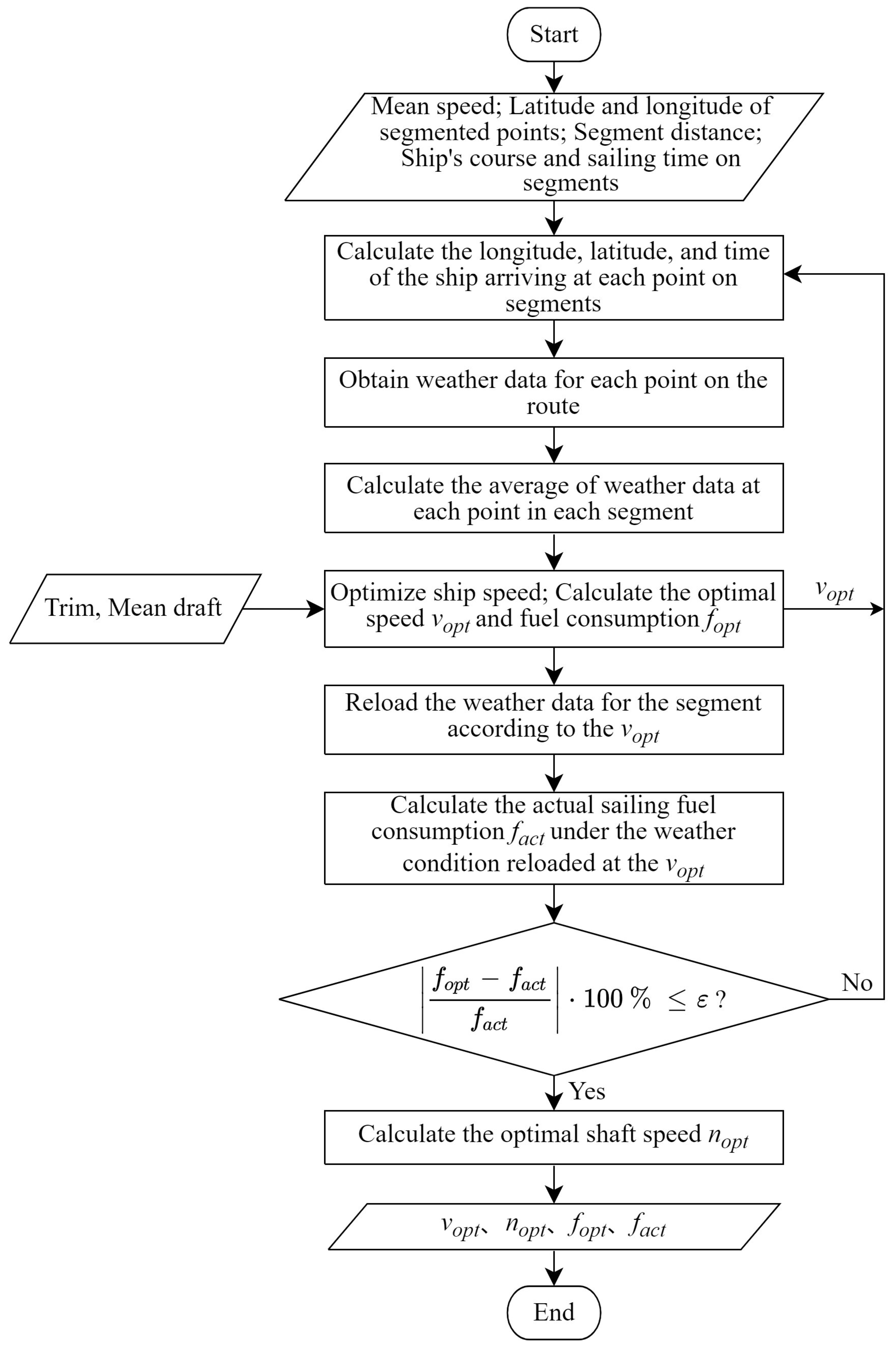
3.2. Route Segmentation Method and Weather Loading-Speed Optimization Iterative Algorithm
4. Objective and Constraints of Ship Speed Optimization
5. Case Study and Results Discussion
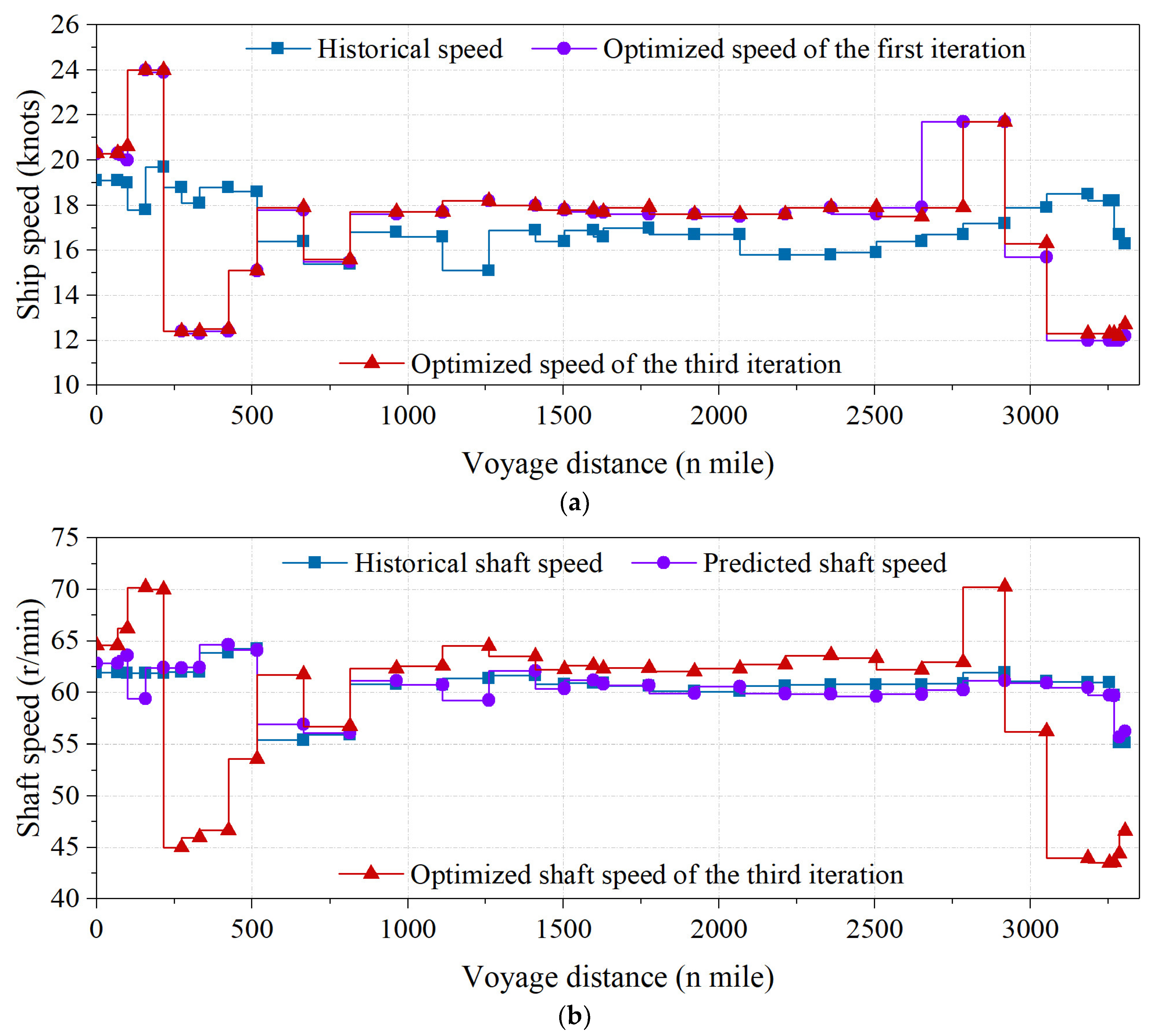
5.1. Analysis of Speed Optimization Results under Historical Trim and Draft Conditions
5.2. Analysis of Speed Optimization Results under Single Trim and Draft Conditions
6. Conclusions
- (1)
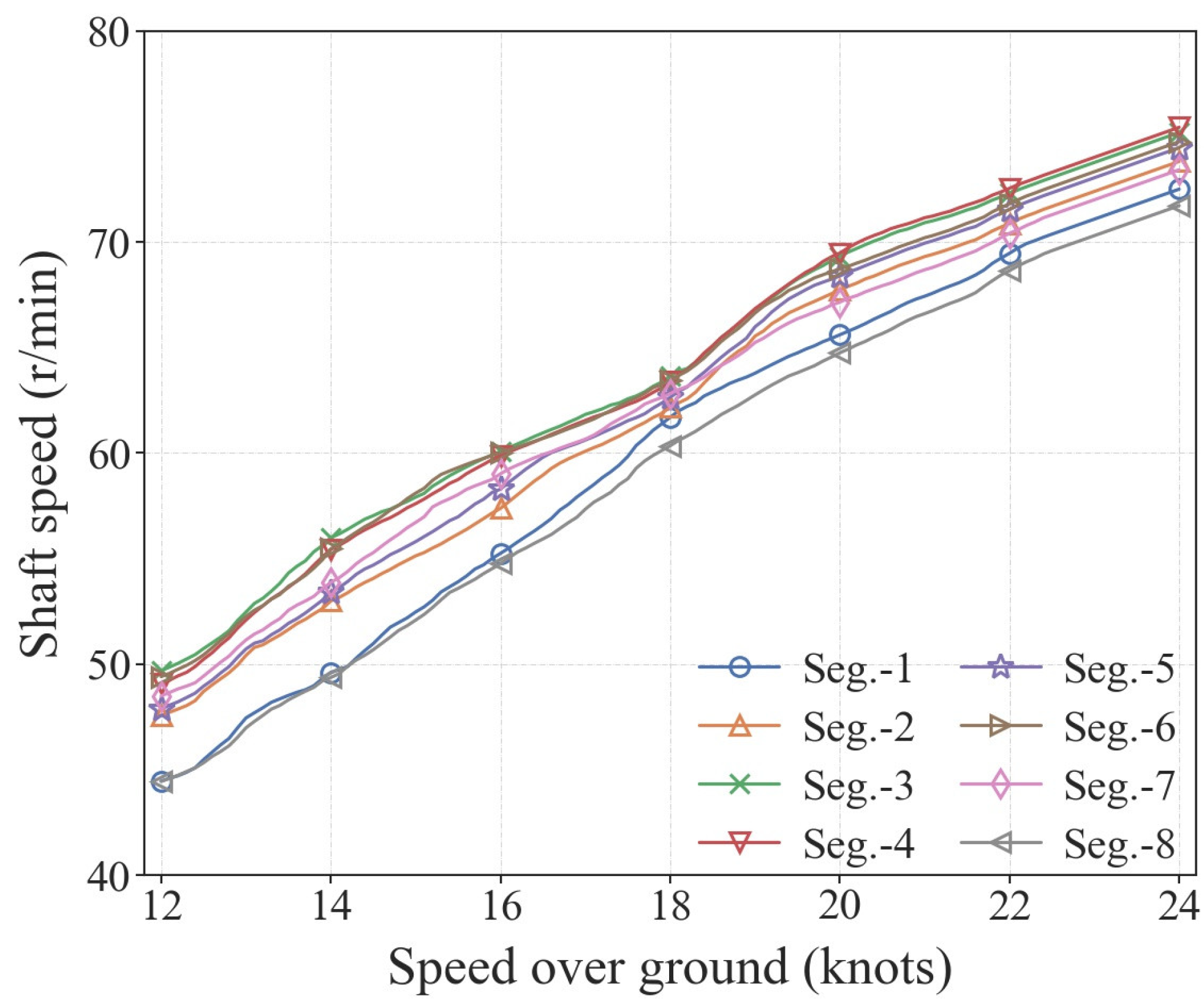
- The adopted model fusion idea provides a new way for building accurate and reliable fuel consumption prediction and shaft speed prediction models in ship speed optimization. Moreover, the main engine fuel consumption prediction model based on the machine learning method shows significant prediction accuracy, with the relative errors of fuel consumption prediction on six routes all less than 0.9%. The establishment of the shaft speed prediction model provides a reliable way to obtain the optimal shaft speed matching the optimal ship speed, thus improving the practicability and ease of use of the ship speed optimization method.
- (2)
- The proposed route segmentation method and weather loading-speed optimization iterative algorithm reduce the difference between optimized fuel consumption and actual (simulated) fuel consumption, and improve the matching degree between route weather data and optimized speed, as well as the practicability and reliability of speed optimization. In addition, the proposed speed optimization algorithm can achieve a fuel-saving rate between 2.1% and 5.2%, and is a simple but practical and effective speed optimization method in practical navigation planning.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Hyperparameters | Package Reference |
|---|---|---|
| RF | max_depth [2~30], min_samples_leaf [1~20], min_samples_split [2~20], max_features [1~11], n_estimators [10~300], random_state = 7, n_jobs = −1 | scikit-learn |
| ET | max_depth [2~30], min_samples_leaf [1~20], min_samples_split [2~20], max_features [1~11], n_estimators [10~300], random_state = 7, n_jobs = −1 | |
| AB | max_depth [2~10], min_samples_leaf [1~20], min_samples_split [2~20], max_features [1~11], n_estimators [10~300], learning_rate [0.00001~1], random_state = 7 | |
| GB | max_depth [2~10], min_samples_leaf [1~20], min_samples_split [2~20], max_features [1~11], n_estimators [10~300], learning_rate [0.00001~1], subsample [0.4~1], random_state = 7 | |
| SVR | kernel = ‘rbf’, C [0.00001~100], gamma [0.00001~10] | |
| ANN | Activation [‘identity’, ‘tanh’, ‘logistic’, ‘relu’], solver [‘lbfgs’, ‘sgd’, ‘adam’], alpha [0.000001~2], learning_rate_init [0.000001~1], beta_1 [0~0.999], beta_2 [0~0.999], random_state = 7 | |
| Ridge | Alpha [0~10] | |
| LASSO | Alpha [0~10] |
| Model | R2 | RMSE (t/day) | MAE (t/day) | MAPE (%) |
|---|---|---|---|---|
| RF | 0.970 | 2.802 | 1.534 | 2.417 |
| ET | 0.975 | 2.565 | 1.365 | 2.161 |
| AB | 0.971 | 2.787 | 1.592 | 2.495 |
| GB | 0.973 | 2.687 | 1.511 | 2.377 |
| SVR | 0.967 | 2.944 | 1.798 | 2.813 |
| ANN | 0.913 | 4.804 | 3.473 | 5.376 |
| Ridge | 0.827 | 6.781 | 5.062 | 7.780 |
| LASSO | 0.827 | 6.781 | 5.062 | 7.780 |
| PR | 0.927 | 4.414 | 3.234 | 5.026 |
| VR | 0.963 | 3.154 | 2.126 | 3.313 |



References
- IMO. Further Shipping GHG Emission Reduction Measures Adopted. Available online: https://www.imo.org/en/MediaCentre/PressBriefings/pages/MEPC76.aspx (accessed on 1 July 2022).
- IMO. Initial IMO GHG Strategy. Available online: https://www.imo.org/en/MediaCentre/HotTopics/Pages/Reducing-greenhouse-gas-emissions-from-ships.aspx (accessed on 1 July 2022).
- Du, Y.Q.; Meng, Q.; Wang, S.A.; Kuang, H.B. Two-phase optimal solutions for ship speed and trim optimization over a voyage using voyage report data. Transp. Res. Part B Methodol. 2019, 122, 88–114. [Google Scholar] [CrossRef]
- Yan, R.; Wang, S.A.; Du, Y.Q. Development of a two-stage ship fuel consumption prediction and reduction model for a dry bulk ship. Transp. Res. Part E Logist. Transp. Rev. 2020, 138, 101930–101951. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, K.; Huang, L.; Chen, J.; Chen, W. Dynamic optimization method of ship speed based on sea condition recognition. J. Harbin Eng. Univ. 2022, 43, 488–494. [Google Scholar]
- Yan, X.P.; Wang, K.; Yuan, Y.P.; Jiang, X.L.; Negenborn, R.R. Energy-efficient shipping: An application of big data analysis for optimizing engine speed of inland ships considering multiple environmental factors. Ocean Eng. 2018, 169, 457–468. [Google Scholar] [CrossRef]
- Wang, K.; Yan, X.; Yuan, Y.; Jiang, X.; Lodewijks, G.; Negenborn, R.R. Study on route division for ship energy efficiency optimization based on big environment data. In Proceedings of the 4th International Conference on Transportation Information and Safety (ICTIS), Banff, AB, Canada, 8–10 August 2017; pp. 111–116. [Google Scholar]
- Psaraftis, H.N.; Kontovas, C.A. Speed models for energy-efficient maritime transportation: A taxonomy and survey. Transp. Res. Part C Emerg. Technol. 2013, 26, 331–351. [Google Scholar] [CrossRef]
- Psaraftis, H.N.; Kontovas, C.A. Ship speed optimization: Concepts, models and combined speed-routing scenarios. Transp. Res. Part C Emerg. Technol. 2014, 44, 52–69. [Google Scholar] [CrossRef] [Green Version]
- Fagerholt, K.; Gausel, N.T.; Rakke, J.G.; Psaraftis, H.N. Maritime routing and speed optimization with emission control areas. Transp. Res. Part C Emerg. Technol. 2015, 52, 57–73. [Google Scholar] [CrossRef] [Green Version]
- Hu, R.X. A route selection and speed optimization method for maritime traffic with emission control areas and weather conditions. Int. J. Sci. 2018, 5, 334–341. [Google Scholar]
- Ma, W.H.; Lu, T.F.; Ma, D.F.; Wang, D.H.; Qu, F.Z. Ship route and speed multi-objective optimization considering weather conditions and emission control area regulations. Marit. Policy Manag. 2021, 48, 1053–1068. [Google Scholar] [CrossRef]
- Wang, S.; Wang, X. A polynomial-time algorithm for sailing speed optimization with containership resource sharing. Transp. Res. Part B Methodol. 2016, 93, 394–405. [Google Scholar] [CrossRef]
- Wang, K.; Yan, X.P.; Yuan, Y.P.; Jiang, X.L.; Lin, X.; Negenborn, R.R. Dynamic optimization of ship energy efficiency considering time-varying environmental factors. Transp. Res. Part D Transp. Environ. 2018, 62, 685–698. [Google Scholar] [CrossRef]
- Yang, L.Q.; Chen, G.; Zhao, J.L.; Rytter, N.G.M. Ship speed optimization considering ocean currents to enhance environmental sustainability in maritime shipping. Sustainability 2020, 12, 93649. [Google Scholar] [CrossRef]
- Tzortzis, G.; Sakalis, G. A dynamic ship speed optimization method with time horizon segmentation. Ocean Eng. 2021, 226, 108840–108853. [Google Scholar] [CrossRef]
- Li, X.H.; Sun, B.Z.; Guo, C.Y.; Du, W.; Li, Y.J. Speed optimization of a container ship on a given route considering voluntary speed loss and emissions. Appl. Ocean Res. 2020, 94, 101995–102004. [Google Scholar] [CrossRef]
- Zhou, T.; Hu, Q.; Hu, Z.; Zhi, J.; Ke, R. Theory and Application of Vessel Speed Dynamic Control considering Safety and Environmental Factors. J. Adv. Transp. 2022, 2022, 5333171. [Google Scholar] [CrossRef]
- Yu, Z.; Wang, H. Real-time optimization of ship energy efficiency based on GWO. Sci. J. Intell. Syst. Res. 2020, 2, 27–33. [Google Scholar]
- Lee, H.; Aydin, N.; Choi, Y.; Lekhavat, S.; Irani, Z. A decision support system for vessel speed decision in maritime logistics using weather archive big data. Comput. Oper. Res. 2018, 98, 330–342. [Google Scholar] [CrossRef]
- Zheng, J.Q.; Zhang, H.R.; Yin, L.; Liang, Y.T.; Wang, B.H.; Li, Z.B.; Song, X.; Zhang, Y. A voyage with minimal fuel consumption for cruise ships. J. Clean. Prod. 2019, 215, 144–153. [Google Scholar] [CrossRef]
- Li, X.H.; Sun, B.Z.; Zhao, Q.B.; Li, Y.J.; Shen, Z.Y.; Du, W.; Xu, N. Model of speed optimization of oil tanker with irregular winds and waves for given route. Ocean Eng. 2018, 164, 628–639. [Google Scholar] [CrossRef]
- Du, Y.; Chen, Y.; Li, X.; Schönborn, A.; Sun, Z. Data fusion and machine learning for ship fuel efficiency modeling: Part III—Sensor data and meteorological data. Commun. Transp. Res. 2022, 2, 100073. [Google Scholar] [CrossRef]
- Berrisford, P.; Dee, D.; Poli, P.; Brugge, R.; Fielding, K.; Fuentes, M.; Kållberg, P.; Kobayashi, S.; Uppala, S.; Simmons, A. The ERA-Interim Archive; European Centre for Medium Range Weather Forecasts: Reading, UK, 2011. [Google Scholar]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Rio, M.H.; Mulet, S.; Picot, N. Beyond GOCE for the ocean circulation estimate: Synergetic use of altimetry, gravimetry, and in situ data provides new insight into geostrophic and Ekman currents. Geophys. Res. Lett. 2014, 41, 8918–8925. [Google Scholar] [CrossRef]
- Li, X.; Du, Y.; Chen, Y.; Nguyen, S.; Zhang, W.; Schönborn, A.; Sun, Z. Data fusion and machine learning for ship fuel efficiency modeling: Part I—Voyage report data and meteorological data. Commun. Transp. Res. 2020, 2, 100074. [Google Scholar] [CrossRef]
- Geurts, P.; Ernst, D.; Wehenkel, L. Extremely randomized trees. Mach. Learn. 2006, 63, 3–42. [Google Scholar] [CrossRef] [Green Version]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Bergstra, J.; Yamins, D.; Cox, D. Making a science of model search: Hyperparameter optimization in hundreds of dimensions for vision architectures. In Proceedings of the 30th International Conference on Machine Learning, Atlanta, GA, USA, 16–21 June 2013; pp. 115–123. [Google Scholar]
- Bennett, G. Practical rhumb line calculations on the spheroid. J. Navig. 1996, 49, 112–119. [Google Scholar] [CrossRef]
- Aertssen, G. Service performance and trials at sea. In Proceedings of the 12th International Towing Tank Conference, Rome, Italy, 22–30 September 1969; pp. 210–214. [Google Scholar]






| Parameter Name | Parameter Value |
|---|---|
| Length (m) | 328.2 |
| Beam (m) | 45.2 |
| Gross tonnage (t) | 109,712 |
| Deadweight capacity (t) | 110,000 |
| Cargo capacity (TEU) | 9200 |
| Minimum speed (knots) | 12 |
| Maximum speed (knots) | 24 |
| Model | R2 | RMSE (t/day) | MAE (t/day) | MAPE (%) |
|---|---|---|---|---|
| ET | 0.975 | 2.565 | 1.365 | 2.161 |
| PR | 0.927 | 4.414 | 3.234 | 5.026 |
| VR | 0.963 | 3.154 | 2.126 | 3.313 |
| Model | R2 | RMSE (r/min) | MAE (r/min) | MAPE (%) |
|---|---|---|---|---|
| VR | 0.949 | 1.270 | 0.916 | 1.673 |
| Route | Departure Port | Destination Port | Departure Time | Destination Time | Total Voyage (nm) |
|---|---|---|---|---|---|
| 1 | Singapore | Jebel Ali | 7 June 2015 05:00:00 | 14 June 2015 08:00:00 | 3284 |
| 2 | Sohar | Singapore | 20 June 2015 08:00:00 | 27 June 2015 21:45:00 | 3315 |
| 3 | Singapore | Jebel Ali | 19 July 2015 04:00:00 | 26 July 2015 08:00:00 | 3306 |
| 4 | Sohar | Singapore | 12 September 2015 08:00:00 | 19 September 2015 20:30:00 | 3284 |
| 5 | Singapore | Jebel Ali | 13 October 2015 04:00:00 | 20 October 2015 08:00:00 | 3331 |
| 6 | Sohar | Singapore | 10 May 2015 08:00:00 | 16 May 2015 21:45:00 | 3228 |
| Iteration Times | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| Route 1 | 1-Historical fuel consumption (t) | 617.525 | |||||
| 2-Predicted fuel consumption (t) | 618.738 | ||||||
| 3-Optimized fuel consumption (t) | 598.357 | 603.376 | 603.480 | 603.402 | 603.403 | 603.403 | |
| 4-Simulated fuel consumption (t) | 604.648 | 603.507 | 603.391 | 603.403 | 603.403 | 603.403 | |
| 3 vs. 1 fuel-saving rate (%) | 3.10 | 2.29 | 2.27 | 2.29 | 2.29 | 2.29 | |
| 3 vs. 2 fuel-saving rate (%) | 3.29 | 2.48 | 2.47 | 2.48 | 2.48 | 2.48 | |
| 4 vs. 3 difference (%) | 1.04 | 0.02 | −0.01 | 0.00 | 0.00 | 0.00 | |
| 4 vs. 1 fuel-saving rate (%) | 2.09 | 2.27 | 2.29 | 2.29 | 2.29 | 2.29 | |
| 4 vs. 2 fuel-saving rate (%) | 2.28 | 2.46 | 2.48 | 2.48 | 2.48 | 2.48 | |
| Route 2 | 1-Historical fuel consumption (t) | 585.908 | |||||
| 2-Predicted fuel consumption (t) | 586.666 | ||||||
| 3-Optimized fuel consumption (t) | 556.022 | 556.213 | 556.097 | 556.139 | 556.144 | 555.981 | |
| 4-Simulated fuel consumption (t) | 556.384 | 556.234 | 556.159 | 556.202 | 556.190 | 556.089 | |
| 3 vs. 1 fuel-saving rate (%) | 5.10 | 5.07 | 5.09 | 5.08 | 5.08 | 5.11 | |
| 3 vs. 2 fuel-saving rate (%) | 5.22 | 5.19 | 5.21 | 5.20 | 5.20 | 5.23 | |
| 4 vs. 3 difference (%) | 0.06 | 0.00 | 0.01 | 0.01 | 0.01 | 0.02 | |
| 4 vs. 1 fuel-saving rate (%) | 5.04 | 5.06 | 5.08 | 5.07 | 5.07 | 5.09 | |
| 4 vs. 2 fuel-saving rate (%) | 5.16 | 5.19 | 5.20 | 5.19 | 5.19 | 5.21 | |
| Route 3 | 1-Historical fuel consumption (t) | 660.518 | |||||
| 2-Predicted fuel consumption (t) | 660.468 | ||||||
| 3-Optimized fuel consumption (t) | 633.950 | 634.400 | 634.449 | 634.577 | 634.459 | 634.602 | |
| 4-Simulated fuel consumption (t) | 634.679 | 634.467 | 634.599 | 634.473 | 634.637 | 634.451 | |
| 3 vs. 1 fuel-saving rate (%) | 4.02 | 3.95 | 3.95 | 3.93 | 3.95 | 3.92 | |
| 3 vs. 2 fuel-saving rate (%) | 4.02 | 3.95 | 3.94 | 3.92 | 3.94 | 3.92 | |
| 4 vs. 3 difference (%) | 0.11 | 0.01 | 0.02 | −0.02 | 0.03 | −0.02 | |
| 4 vs. 1 fuel-saving rate (%) | 3.91 | 3.94 | 3.92 | 3.94 | 3.92 | 3.95 | |
| 4 vs. 2 fuel-saving rate (%) | 3.90 | 3.94 | 3.92 | 3.94 | 3.91 | 3.94 | |
| Route 4 | 1-Historical fuel consumption (t) | 538.414 | |||||
| 2-Predicted fuel consumption (t) | 533.667 | ||||||
| 3-Optimized fuel consumption (t) | 517.887 | 518.017 | 517.108 | 518.276 | 517.122 | 518.230 | |
| 4-Simulated fuel consumption (t) | 518.267 | 517.376 | 518.457 | 517.393 | 518.399 | 517.516 | |
| 3 vs. 1 fuel-saving rate (%) | 3.81 | 3.79 | 3.96 | 3.74 | 3.95 | 3.75 | |
| 3 vs. 2 fuel-saving rate (%) | 2.96 | 2.93 | 3.10 | 2.88 | 3.10 | 2.89 | |
| 4 vs. 3 difference (%) | 0.07 | −0.12 | 0.26 | −0.17 | 0.25 | −0.14 | |
| 4 vs. 1 fuel-saving rate (%) | 3.74 | 3.91 | 3.71 | 3.90 | 3.72 | 3.88 | |
| 4 vs. 2 fuel-saving rate (%) | 2.89 | 3.05 | 2.85 | 3.05 | 2.86 | 3.03 | |
| Route 5 | 1-Historical fuel consumption (t) | 579.566 | |||||
| 2-Predicted fuel consumption (t) | 576.049 | ||||||
| 3-Optimized fuel consumption (t) | 549.313 | 550.731 | 551.542 | 551.024 | 550.892 | 551.519 | |
| 4-Simulated fuel consumption (t) | 552.936 | 552.581 | 551.396 | 551.131 | 551.726 | 551.847 | |
| 3 vs. 1 fuel-saving rate (%) | 5.22 | 4.98 | 4.84 | 4.92 | 4.95 | 4.84 | |
| 3 vs. 2 fuel-saving rate (%) | 4.64 | 4.40 | 4.25 | 4.34 | 4.37 | 4.26 | |
| 4 vs. 3 difference (%) | 0.66 | 0.33 | −0.03 | 0.02 | 0.15 | 0.06 | |
| 4 vs. 1 fuel-saving rate (%) | 4.59 | 4.66 | 4.86 | 4.91 | 4.80 | 4.78 | |
| 4 vs. 2 fuel-saving rate (%) | 4.01 | 4.07 | 4.28 | 4.33 | 4.22 | 4.20 | |
| Route 6 | 1-Historical fuel consumption (t) | 558.545 | |||||
| 2-Predicted fuel consumption (t) | 557.392 | ||||||
| 3-Optimized fuel consumption (t) | 542.819 | 542.658 | 542.545 | 542.320 | 542.820 | 542.746 | |
| 4-Simulated fuel consumption (t) | 542.687 | 542.598 | 542.431 | 542.861 | 542.736 | 542.845 | |
| 3 vs. 1 fuel-saving rate (%) | 2.82 | 2.84 | 2.86 | 2.90 | 2.82 | 2.83 | |
| 3 vs. 2 fuel-saving rate (%) | 2.61 | 2.64 | 2.66 | 2.70 | 2.61 | 2.63 | |
| 4 vs. 3 difference (%) | −0.02 | −0.01 | −0.02 | 0.10 | −0.02 | 0.02 | |
| 4 vs. 1 fuel-saving rate (%) | 2.84 | 2.85 | 2.88 | 2.81 | 2.83 | 2.81 | |
| 4 vs. 2 fuel-saving rate (%) | 2.64 | 2.65 | 2.68 | 2.61 | 2.63 | 2.61 | |
| Iteration Times | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | ||
| Route 1 | 1-Historical fuel consumption (t) | 617.525 | |||||
| 2-Predicted fuel consumption (t) | 619.765 | ||||||
| 3-Optimized fuel consumption (t) | 600.302 | 604.252 | 604.948 | 604.980 | 604.980 | 604.980 | |
| 4-Simulated fuel consumption (t) | 606.143 | 604.974 | 604.980 | 604.980 | 604.980 | 604.980 | |
| 3 vs. 1 fuel-saving rate (%) | 2.79 | 2.15 | 2.04 | 2.03 | 2.03 | 2.03 | |
| 3 vs. 2 fuel-saving rate (%) | 3.14 | 2.50 | 2.39 | 2.39 | 2.39 | 2.39 | |
| 4 vs. 3 difference (%) | 0.96 | 0.12 | 0.01 | 0.00 | 0.00 | 0.00 | |
| 4 vs. 1 fuel-saving rate (%) | 1.84 | 2.03 | 2.03 | 2.03 | 2.03 | 2.03 | |
| 4 vs. 2 fuel-saving rate (%) | 2.20 | 2.39 | 2.39 | 2.39 | 2.39 | 2.39 | |
| Route 2 | 1-Historical fuel consumption (t) | 585.908 | |||||
| 2-Predicted fuel consumption (t) | 587.070 | ||||||
| 3-Optimized fuel consumption (t) | 557.896 | 558.239 | 558.229 | 558.145 | 558.113 | 558.320 | |
| 4-Simulated fuel consumption (t) | 558.335 | 558.268 | 558.235 | 558.146 | 558.272 | 558.080 | |
| 3 vs. 1 fuel-saving rate (%) | 4.78 | 4.72 | 4.72 | 4.74 | 4.74 | 4.71 | |
| 3 vs. 2 fuel-saving rate (%) | 4.97 | 4.91 | 4.91 | 4.93 | 4.93 | 4.90 | |
| 4 vs. 3 difference (%) | 0.08 | 0.01 | 0.00 | 0.00 | 0.03 | −0.04 | |
| 4 vs. 1 fuel-saving rate (%) | 4.71 | 4.72 | 4.72 | 4.74 | 4.72 | 4.75 | |
| 4 vs. 2 fuel-saving rate (%) | 4.89 | 4.91 | 4.91 | 4.93 | 4.91 | 4.94 | |
| Route 3 | 1-Historical fuel consumption (t) | 660.518 | |||||
| 2-Predicted fuel consumption (t) | 660.725 | ||||||
| 3-Optimized fuel consumption (t) | 634.084 | 634.977 | 634.595 | 634.481 | 634.523 | 634.523 | |
| 4-Simulated fuel consumption (t) | 635.334 | 634.702 | 634.536 | 634.523 | 634.523 | 634.523 | |
| 3 vs. 1 fuel-saving rate (%) | 4.00 | 3.87 | 3.92 | 3.94 | 3.94 | 3.94 | |
| 3 vs. 2 fuel-saving rate (%) | 4.03 | 3.90 | 3.95 | 3.97 | 3.97 | 3.97 | |
| 4 vs. 3 difference (%) | 0.20 | −0.04 | −0.01 | 0.01 | 0.00 | 0.00 | |
| 4 vs. 1 fuel-saving rate (%) | 3.81 | 3.91 | 3.93 | 3.94 | 3.94 | 3.94 | |
| 4 vs. 2 fuel-saving rate (%) | 3.84 | 3.94 | 3.96 | 3.97 | 3.97 | 3.97 | |
| Route 4 | 1-Historical fuel consumption (t) | 538.414 | |||||
| 2-Predicted fuel consumption (t) | 528.543 | ||||||
| 3-Optimized fuel consumption (t) | 514.066 | 514.043 | 514.484 | 514.422 | 514.244 | 513.974 | |
| 4-Simulated fuel consumption (t) | 514.277 | 514.532 | 514.467 | 514.257 | 514.231 | 514.535 | |
| 3 vs. 1 fuel-saving rate (%) | 4.52 | 4.53 | 4.44 | 4.46 | 4.49 | 4.54 | |
| 3 vs. 2 fuel-saving rate (%) | 2.74 | 2.74 | 2.66 | 2.67 | 2.71 | 2.76 | |
| 4 vs. 3 difference (%) | 0.04 | 0.10 | 0.00 | −0.03 | 0.00 | 0.11 | |
| 4 vs. 1 fuel-saving rate (%) | 4.48 | 4.44 | 4.45 | 4.49 | 4.49 | 4.44 | |
| 4 vs. 2 fuel-saving rate (%) | 2.70 | 2.65 | 2.66 | 2.70 | 2.71 | 2.65 | |
| Route 5 | 1-Historical fuel consumption (t) | 579.566 | |||||
| 2-Predicted fuel consumption (t) | 576.095 | ||||||
| 3-Optimized fuel consumption (t) | 549.758 | 551.953 | 551.519 | 551.495 | 551.631 | 551.571 | |
| 4-Simulated fuel consumption (t) | 553.485 | 551.662 | 551.627 | 551.703 | 551.695 | 551.609 | |
| 3 vs. 1 fuel-saving rate (%) | 5.14 | 4.76 | 4.84 | 4.84 | 4.82 | 4.83 | |
| 3 vs. 2 fuel-saving rate (%) | 4.57 | 4.19 | 4.27 | 4.27 | 4.25 | 4.26 | |
| 4 vs. 3 difference (%) | 0.67 | −0.05 | 0.02 | 0.04 | 0.01 | 0.01 | |
| 4 vs. 1 fuel-saving rate (%) | 4.50 | 4.81 | 4.82 | 4.81 | 4.81 | 4.82 | |
| 4 vs. 2 fuel-saving rate (%) | 3.92 | 4.24 | 4.25 | 4.23 | 4.24 | 4.25 | |
| Route 6 | 1-Historical fuel consumption (t) | 558.545 | |||||
| 2-Predicted fuel consumption (t) | 558.933 | ||||||
| 3-Optimized fuel consumption (t) | 543.634 | 543.942 | 544.045 | 543.801 | 543.809 | 543.801 | |
| 4-Simulated fuel consumption (t) | 544.010 | 544.036 | 543.903 | 543.957 | 543.903 | 543.957 | |
| 3 vs. 1 fuel-saving rate (%) | 2.67 | 2.61 | 2.60 | 2.64 | 2.64 | 2.64 | |
| 3 vs. 2 fuel-saving rate (%) | 2.74 | 2.68 | 2.66 | 2.71 | 2.71 | 2.71 | |
| 4 vs. 3 difference (%) | 0.07 | 0.02 | −0.03 | 0.03 | 0.02 | 0.03 | |
| 4 vs. 1 fuel-saving rate (%) | 2.60 | 2.60 | 2.62 | 2.61 | 2.62 | 2.61 | |
| 4 vs. 2 fuel-saving rate (%) | 2.67 | 2.67 | 2.69 | 2.68 | 2.69 | 2.68 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Sun, B.; Jin, J.; Ding, J. Speed Optimization of Container Ship Considering Route Segmentation and Weather Data Loading: Turning Point-Time Segmentation Method. J. Mar. Sci. Eng. 2022, 10, 1835. https://doi.org/10.3390/jmse10121835
Li X, Sun B, Jin J, Ding J. Speed Optimization of Container Ship Considering Route Segmentation and Weather Data Loading: Turning Point-Time Segmentation Method. Journal of Marine Science and Engineering. 2022; 10(12):1835. https://doi.org/10.3390/jmse10121835
Chicago/Turabian StyleLi, Xiaohe, Baozhi Sun, Jianhai Jin, and Jun Ding. 2022. "Speed Optimization of Container Ship Considering Route Segmentation and Weather Data Loading: Turning Point-Time Segmentation Method" Journal of Marine Science and Engineering 10, no. 12: 1835. https://doi.org/10.3390/jmse10121835
APA StyleLi, X., Sun, B., Jin, J., & Ding, J. (2022). Speed Optimization of Container Ship Considering Route Segmentation and Weather Data Loading: Turning Point-Time Segmentation Method. Journal of Marine Science and Engineering, 10(12), 1835. https://doi.org/10.3390/jmse10121835