
An Overview of Oil-Mineral-Aggregate Formation, Settling, and Transport Processes in Marine Oil Spill Models



Abstract
:1. Introduction
2. Oil Spill Weathering and Movement and How They Are Modelled
2.1. Oil Weathering
2.2. The Movement of Spilled Oil
2.3. Commonly Used Models
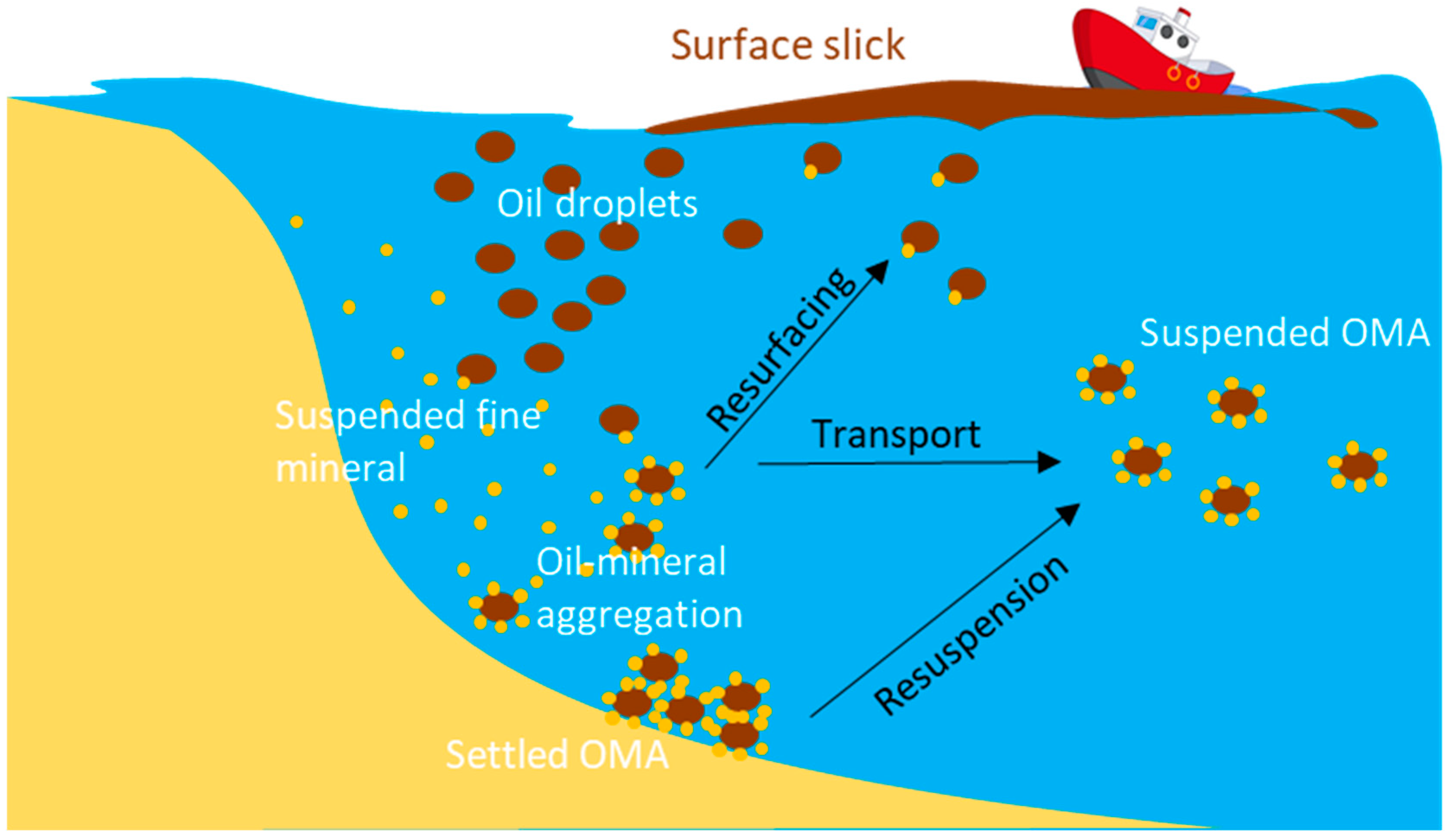
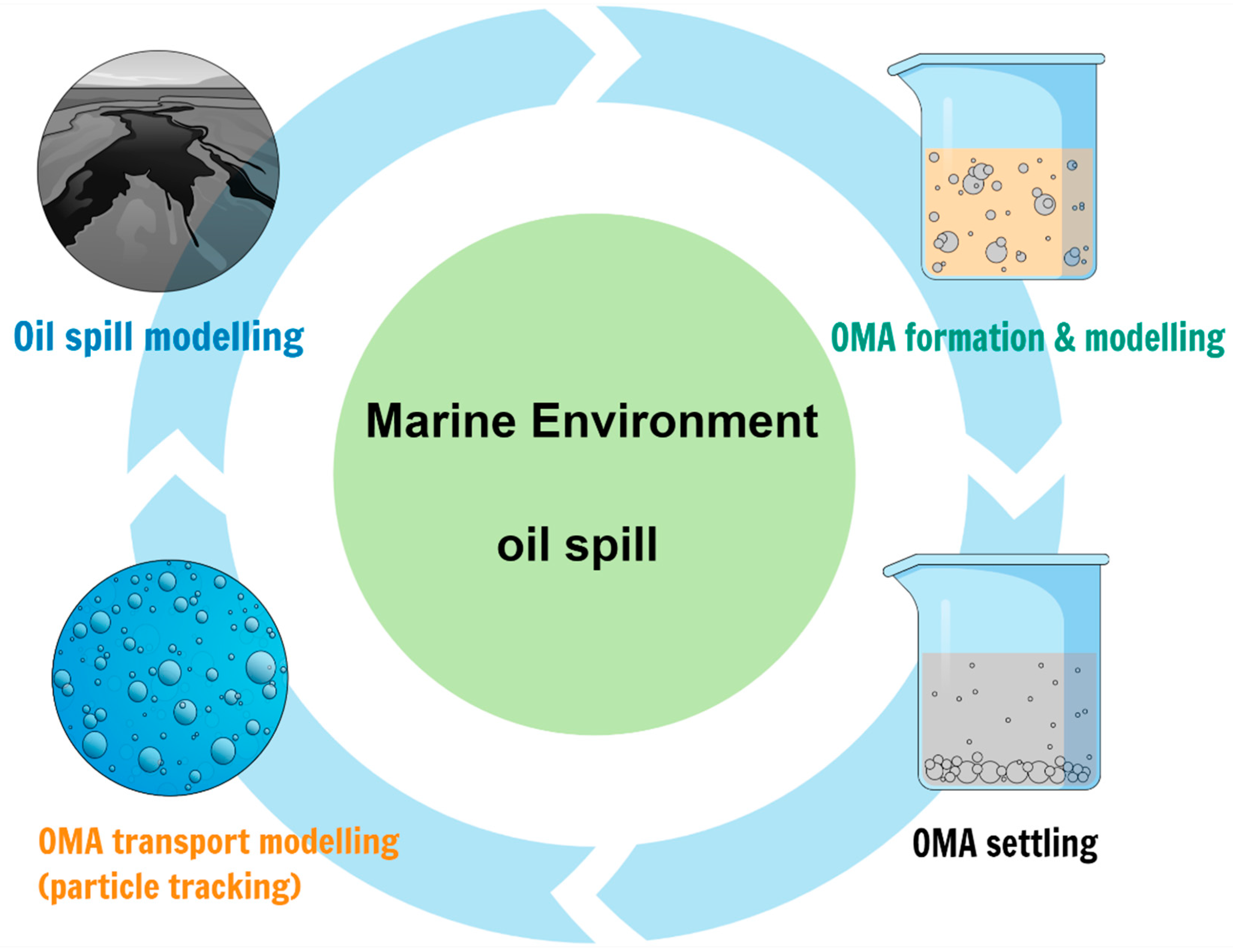
3. Oil-Mineral-Aggregate (OMA)
3.1. Factors Influencing OMA Formation
3.2. OMA Settling
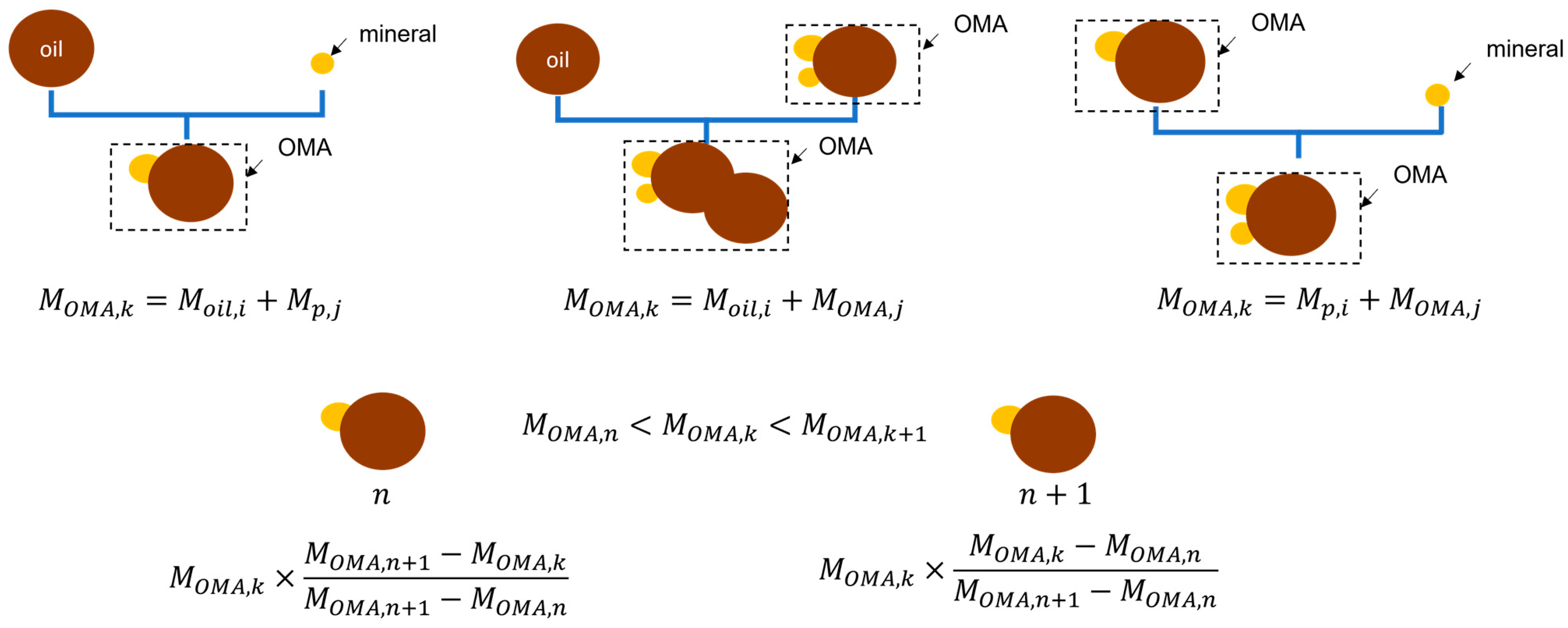
3.3. Modelling OMA Size Distribution
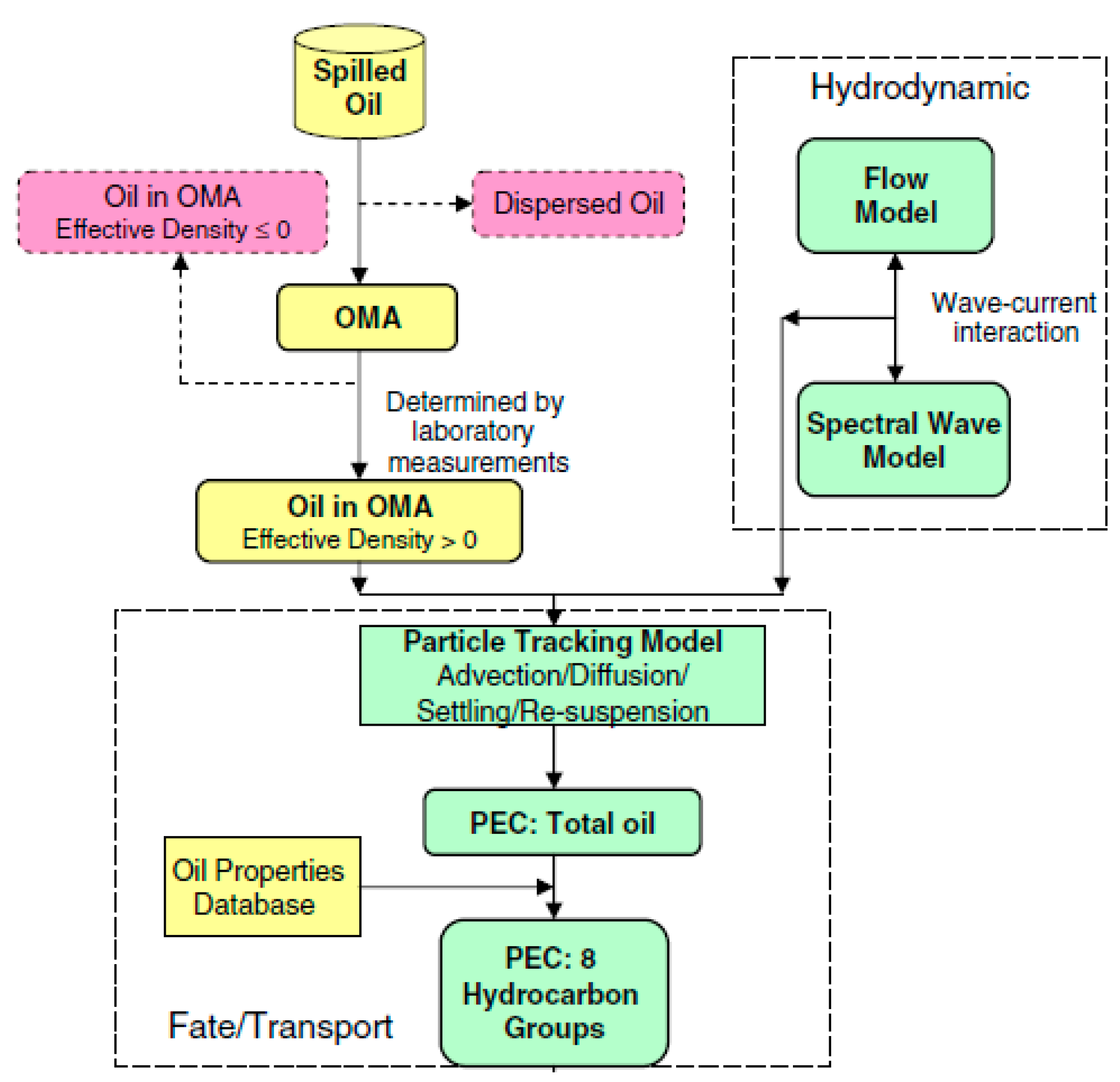
3.4. OMA Transport Modelling
4. Challenges and Recommendations
5. Conclusions
- Many environmental factors have been reported to influence OMA size distribution and settling velocity, such as temperature, salinity, sediment concentration, the presence of dispersants, and so on.
- Statistical design and analysis should be used to determine the significance of each factor and their inter-dependencies.
- Attempts have been made to measure settling velocities in laboratory experiments, and the reported settling velocities ranged from 1 to 10.4 mm/s depending on experimental conditions. However, the lack of an adequate empirical equation for estimating an OMA settling velocity hinders OMA transport and oil spill modelling.
- Efforts at modelling the OMA size distribution have been made based upon collision theory. The Monte Carlo method has also been applied to model the size distribution of OMA; however, including the OMA breakup process or disregarding it could influence modelling results.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mishra, A.K.; Kumar, G.S. Weathering of Oil Spill: Modeling and Analysis. Aquat. Procedia 2015, 4, 435–442. [Google Scholar] [CrossRef]
- ITOPF. ITOPF Handbook. 2019. Available online: https://www.itopf.org/knowledge-resources/documents-guides/document/itopf-handbook/ (accessed on 27 November 2019).
- Fingas, M. Oil Spill Science and Technology; Gulf Professional Publishing: Houston, TX, USA, 2016. [Google Scholar]
- Ivanov, A.Y.; Zatyagalova, V.V. A GIS Approach to Mapping Oil Spills in a Marine Environment. Int. J. Remote Sens. 2008, 29, 6297–6313. [Google Scholar] [CrossRef]
- Verma, P.; Wate, S.R.; Devotta, S. Simulation of Impact of Oil Spill in the Ocean—A Case Study of Arabian Gulf. Environ. Monit. Assess. 2008, 146, 191–201. [Google Scholar] [CrossRef] [PubMed]
- French-McCay, D.P.; Spaulding, M.L.; Crowley, D.; Mendelsohn, D.; Fontenault, J.; Horn, M. Validation of Oil Trajectory and Fate Modeling of the Deepwater Horizon Oil Spill. Front. Mar. Sci. 2021, 8, 136. [Google Scholar] [CrossRef]
- Daling, P.S.; Aamo, O.M.; Lewis, A.; Strøm-Kristiansen, T. Sintef/Iku Oil-Weathering Model: Predicting Oils’ Properties at Sea. Int. Oil Spill Conf. Proc. 1997, 1997, 297–307. [Google Scholar] [CrossRef]
- Reed, M.; Daling, P.; Lewis, A.; Ditlevsen, M.K.; Brørs, B.; Clark, J.; Aurand, D. Modelling of Dispersant Application to Oil Spills in Shallow Coastal Waters. Environ. Model. Softw. 2004, 19, 681–690. [Google Scholar] [CrossRef]
- RPS-ASA. Software—OILMAP. Available online: http://www.asascience.com/software/oilmap/ (accessed on 10 September 2018).
- RPS-ASA. Software—SIMAPTM. Available online: http://asascience.com/software/simap/ (accessed on 10 September 2018).
- Fernandes, R. Risk Management of Coastal Pollution from Oil Spills Supported by Operational Numerical Modelling. Ph.D. Thesis, Instituto Superior Técnico, Universidade de Lisboa, Lisbon, Portugal, 2018. [Google Scholar]
- National Oceanic and Atmospheric Administration (NOAA). GNOME User’s Manual. Available online: http://www.webcitation.org/72P8XJ1SZ (accessed on 10 September 2018).
- Dagestad, K.-F.; Röhrs, J.; Breivik, Ø.; Ådlandsvik, B. OpenDrift v1.0: A Generic Framework for Trajectory Modelling. Geosci. Model Dev. 2018, 11, 1405–1420. [Google Scholar] [CrossRef] [Green Version]
- Röhrs, J.; Dagestad, K.-F.; Asbjørnsen, H.; Nordam, T.; Skancke, J.; Jones, C.E.; Brekke, C. The Effect of Vertical Mixing on the Horizontal Drift of Oil Spills. Ocean Sci. 2018, 14, 1581–1601. [Google Scholar] [CrossRef] [Green Version]
- Page, C.A.; Bonner, J.S.; Sumner, P.L.; McDonald, T.J.; Autenrieth, R.L.; Fuller, C.B. Behavior of a Chemically-Dispersed Oil and a Whole Oil on a near-Shore Environment. Water Res. 2000, 34, 2507–2516. [Google Scholar] [CrossRef]
- Sterling, M.C.; Bonner, J.S.; Page, C.A.; Fuller, C.B.; Ernest, A.N.S.; Autenrieth, R.L. Partitioning of Crude Oil Polycyclic Aromatic Hydrocarbons in Aquatic Systems. Environ. Sci. Technol. 2003, 37, 4429–4434. [Google Scholar] [CrossRef]
- Dollhopf, R.H.; Fitzpatrick, F.A.; Kimble1, J.W.; Capone, D.M.; Graan, T.P.; Zelt, R.B.; Johnson, R. Response to Heavy, Non-Floating Oil Spilled in a Great Lakes River Environment: A Multiple-Lines-Of-Evidence Approach for Submerged Oil Assessment and Recovery. Int. Oil Spill Conf. Proc. 2014, 2014, 434–448. [Google Scholar] [CrossRef]
- Lee, K.; Bugden, J.; Cobanli, S.; King, T.; McIntyre, C.; Robinson, B.; Ryan, S.; Wohlgeschaffen, G. UV-Epifluorescence Microscopy Analysis of Sediments Recovered from the Kalamazoo River; Centre for Offshore Oil, Gas and Energy Research (COOGER), Fisheries and Oceans Canada: Dartmouth, NS, Canada, 2012. [Google Scholar]
- Gordon, D.C., Jr.; Keizer, P.D.; Prouse, N.J. Laboratory Studies of the Accommodation of Some Crude and Residual Fuel Oils in Sea Water. J. Fish. Res. Board Can. 1973, 30, 1611–1618. [Google Scholar] [CrossRef]
- Johansson, S.; Larsson, U.; Boehm, P. The Tsesis Oil Spill Impact on the Pelagic Ecosystem. Mar. Pollut. Bull. 1980, 11, 284–293. [Google Scholar] [CrossRef]
- Muschenheim, D.K.; Lee, K. Removal of Oil from the Sea Surface through Particulate Interactions: Review and Prospectus. Spill Sci. Technol. Bull. 2002, 8, 9–18. [Google Scholar] [CrossRef]
- Gustitus, S.A.; Clement, T.P. Formation, Fate, and Impacts of Microscopic and Macroscopic Oil-Sediment Residues in Nearshore Marine Environments: A Critical Review. Rev. Geophys. 2017, 55, 1130–1157. [Google Scholar] [CrossRef]
- Fingas, M. Chapter 8—Introduction to Spill Modeling. In Oil Spill Science and Technology; Fingas, M., Ed.; Gulf Professional Publishing: Boston, MA, USA, 2011; pp. 187–200. [Google Scholar]
- Lee, K.; Boufadel, M.; Chen, B.; Foght, J.; Hodson, P.; Swanson, S.; Venosa, A. Expert Panel Report on the Behaviour and Environmental Impacts of Crude Oil Released into Aqueous Environments; Royal Society of Canada: Ottawa, ON, Canada, 2015. [Google Scholar]
- Dutta, T.K.; Harayama, S. Fate of Crude Oil by the Combination of Photooxidation and Biodegradation. Environ. Sci. Technol. 2000, 34, 1500–1505. [Google Scholar] [CrossRef]
- Fingas, M. The Evaporation of Oil Spills. In Arctic and Marine Oilspill Program Technical Seminar; Ministry of Supply and Services: Ottawa, ON, Canada, 1995; pp. 43–60. [Google Scholar]
- Walker, A.H.; Stern, C.; Scholz, D.; Nielsen, E.; Csulak, F.; Gaudiosi, R. Consensus Ecological Risk Assessment of Potential Transportation-Related Bakken and Dilbit Crude Oil Spills in the Delaware Bay Watershed, USA. J. Mar. Sci. Eng. 2016, 4, 23. [Google Scholar] [CrossRef] [Green Version]
- Fingas, M. Chapter 10—Models for Water-in-Oil Emulsion Formation. In Oil Spill Science and Technology; Fingas, M., Ed.; Gulf Professional Publishing: Boston, MA, USA, 2011; pp. 243–273. ISBN 978-1-85617-943-0. [Google Scholar]
- Fay, J.A. The Spread of Oil Slicks on a Calm Sea. In Oil on the Sea, Proceedings of a Symposium on the Scientific and Engineering Aspects of Oil Pollution of the Sea, Sponsored by Massachusetts Institute of Technology and Woods Hole Oceanographic Institution and Held at Cambridge, MA, USA, 16 May 1969; Hoult, D.P., Ed.; Ocean Technology; Springer: Boston, MA, USA, 1969; pp. 53–63. ISBN 978-1-4684-9019-0. [Google Scholar]
- Dew, W.A.; Hontela, A.; Rood, S.B.; Pyle, G.G. Biological Effects and Toxicity of Diluted Bitumen and Its Constituents in Freshwater Systems. J. Appl. Toxicol. 2015, 35, 1219–1227. [Google Scholar] [CrossRef]
- Lehr, W.J. Review of Modeling Procedures for Oil Spill Weathering Behavior. Adv. Ecol. Sci. 2001, 9, 51–90. [Google Scholar]
- Wang, S.-D.; Shen, Y.-M.; Guo, Y.-K.; Tang, J. Three-Dimensional Numerical Simulation for Transport of Oil Spills in Seas. Ocean Eng. 2008, 35, 503–510. [Google Scholar] [CrossRef]
- Michel, J.; Rutherford, N. Impacts, Recovery Rates, and Treatment Options for Spilled Oil in Marshes. Mar. Pollut. Bull. 2014, 82, 19–25. [Google Scholar] [CrossRef] [PubMed]
- Lehr, W.; Jones, R.; Evans, M.; Simecek-Beatty, D.; Overstreet, R. Revisions of the ADIOS Oil Spill Model. Environ. Model. Softw. 2002, 17, 189–197. [Google Scholar] [CrossRef]
- Lehr, W.J.; Overstreet, R.; Jones, R.; Watabayashi, G. ADIOS-Automated Data Inquiry for Oil Spills. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Edmonton, AB, Canada, 10–12 June 1992. [Google Scholar]
- Mackay, D.; Buist, I.; Mascarenhas, R.; Paterson, S. Oil Spill Processes and Models; Technical Report EE-8; Environment Canada: Ottawa, ON, Canada, 1980; p. 17. [Google Scholar]
- Mackay, D.; Paterson, S.; Trudel, K. A Mathematical Model of Oil Spill Behaviour; Department of Chemical and Applied Chemistry, University of Toronto: Toronto, ON, Canada, 1980; 39p. [Google Scholar]
- Aamo, O.M.; Reed, M.; Daling, P.S. A Laboratory-Based Weathering Model: PC Version for Coupling to Transport Models. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Calgary, AB, Canada, 7–9 June 1993. [Google Scholar]
- Li, P.; Niu, H.; Li, S.; King, T.L.; Zou, S.; Chen, X.; Lu, Z. DBWM: A Diluted Bitumen Weathering Model. Mar. Pollut. Bull. 2022, 175, 113372. [Google Scholar] [CrossRef] [PubMed]
- Reed, M.; Johansen, Ø.; Brandvik, P.J.; Daling, P.; Lewis, A.; Fiocco, R.; Mackay, D.; Prentki, R. Oil Spill Modeling towards the Close of the 20th Century: Overview of the State of the Art. Spill Sci. Technol. Bull. 1999, 5, 3–16. [Google Scholar] [CrossRef]
- American Society of Civil Engineers (ASCE). State-of-the-Art Review of Modeling Transport and Fate of Oil Spills. J. Hydraul. Eng. 1996, 122, 594–609. [Google Scholar] [CrossRef]
- Spaulding, M.L. State of the Art Review and Future Directions in Oil Spill Modeling. Mar. Pollut. Bull. 2017, 115, 7–19. [Google Scholar] [CrossRef]
- Marcotte, G.; Bourgouin, P.; Mercier, G.; Gauthier, J.P.; Pellerin, P.; Smith, G.; Brown, C.W. Canadian Oil Spill Modelling Suite: An Overview; Gulf Publishing Company: Halifax, NS, Canada, 2016; pp. 1026–1034. [Google Scholar]
- Tetra Tech. Spillcalc Oil and Contaminant Spill Model. Available online: http://www.tetratech.com/en/projects/spillcalc-oil-and-contaminant-spill-model (accessed on 10 September 2018).
- Reed, M.; Gundlach, E.; Kana, T. A Coastal Zone Oil Spill Model: Development and Sensitivity Studies. Oil Chem. Pollut. 1989, 5, 411–449. [Google Scholar] [CrossRef]
- NOAA. GNOME Suite for Oil Spill Modeling. Available online: https://response.restoration.noaa.gov/oil-and-chemical-spills/oil-spills/response-tools/gnome-suite-oil-spill-modeling.html (accessed on 29 January 2022).
- Al-Rabeh, A.H.; Lardner, R.W.; Gunay, N. Gulfspill Version 2.0: A Software Package for Oil Spills in the Arabian Gulf. Environ. Model. Softw. 2000, 15, 425–442. [Google Scholar] [CrossRef]
- Lardner, R.; Zodiatis, G.; Hayes, D.; Pinardi, N. Application of the MEDSLIK Oil Spill Model to the Lebanese Spill of July 2006; European Group of Experts on satellite monitoring of sea based oil pollution; European Communities: Maastricht, The Netherlands, 2006; pp. 1018–5593. [Google Scholar]
- Lardner, R.W.; Zodiatis, G.; Loizides, L.; Demetropoulos, A. An Operational Oil Spill Model for the Levantine Basin (Eastern Mediterranean Sea). In Proceedings of the International Symposium on Marine Pollution, Monaco, Monaco, 5–9 October 1999. [Google Scholar]
- De Dominicis, M.; Pinardi, N.; Zodiatis, G.; Archetti, R. MEDSLIK-II, a Lagrangian Marine Surface Oil Spill Model for Short-Term Forecasting—Part 2: Numerical Simulations and Validations. Geosci. Model Dev. 2013, 6, 1871–1888. [Google Scholar] [CrossRef] [Green Version]
- Danish Hydraulic Institute (DHI). DHI Oil Spill Model—Scientific Description. Available online: http://manuals.mikepoweredbydhi.help/2017/General/DHI_OilSpill_Model.pdf (accessed on 31 March 2022).
- Carracedo, P.; Torres-López, S.; Barreiro, M.; Montero, P.; Balseiro, C.F.; Penabad, E.; Leitao, P.C.; Pérez-Muñuzuri, V. Improvement of Pollutant Drift Forecast System Applied to the Prestige Oil Spills in Galicia Coast (NW of Spain): Development of an Operational System. Mar. Pollut. Bull. 2006, 53, 350–360. [Google Scholar] [CrossRef]
- Daniel, P.; Marty, F.; Josse, P.; Skandrani, C.; Benshila, R. Improvement of Drift Calculation in Mothy Operational Oil Spill Prediction System. Int. Oil Spill Conf. Proc. 2003, 2003, 1067–1072. [Google Scholar] [CrossRef] [Green Version]
- Spaulding, M.L.; Kolluru, V.S.; Anderson, E.; Howlett, E. Application of Three-Dimensional Oil Spill Model (WOSM/OILMAP) to Hindcast the Braer Spill. Spill Sci. Technol. Bull. 1994, 1, 23–35. [Google Scholar] [CrossRef]
- Garcia, M.C.; Sanz-Bobi, M.A.; del Pico, J. SIMAP: Intelligent System for Predictive Maintenance: Application to the Health Condition Monitoring of a Windturbine Gearbox. Comput. Ind. 2006, 57, 552–568. [Google Scholar] [CrossRef]
- Berry, A.; Dabrowski, T.; Lyons, K. The Oil Spill Model Oiltrans and Its Application to the Celtic Sea. Mar. Pollut. Bull. 2012, 64, 2489–2501. [Google Scholar] [CrossRef] [Green Version]
- Reed, M.; Aamo, O.M.; Daling, P.S. Quantitative Analysis of Alternate Oil Spill Response Strategies Using OSCAR. Spill Sci. Technol. Bull. 1995, 2, 67–74. [Google Scholar] [CrossRef]
- Ji, W.; Boufadel, M.; Zhao, L.; Robinson, B.; King, T.; An, C.; Zhang, B.; Lee, K. Formation of Oil-Particle Aggregates: Impacts of Mixing Energy and Duration. Sci. Total Environ. 2021, 795, 148781. [Google Scholar] [CrossRef]
- Smith, R.A.; Slack, J.R.; Wyant, T.; Lanfear, K.J. The Oilspill Risk Analysis Model of the US Geological Survey. Geological Survey Professional Paper 1227; US Geological Survey: Reston, VA, USA, 1982; Volume 36.
- Ji, Z.-G. Hydrodynamics and Water Quality: Modeling Rivers, Lakes, and Estuaries; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Annika, P.; George, T.; George, P.; Konstantinos, N.; Costas, D.; Koutitas, C. The Poseidon Operational Tool for the Prediction of Floating Pollutant Transport. Mar. Pollut. Bull. 2001, 43, 270–278. [Google Scholar] [CrossRef]
- Nittis, K.; Perivoliotis, L.; Korres, G.; Tziavos, C.; Thanos, I. Operational Monitoring and Forecasting for Marine Environmental Applications in the Aegean Sea. Environ. Model. Softw. 2006, 21, 243–257. [Google Scholar] [CrossRef]
- Ainsworth, C.H.; Chassignet, E.P.; French-McCay, D.; Beegle-Krause, C.J.; Berenshtein, I.; Englehardt, J.; Fiddaman, T.; Huang, H.; Huettel, M.; Justic, D.; et al. Ten Years of Modeling the Deepwater Horizon Oil Spill. Environ. Model. Softw. 2021, 142, 105070. [Google Scholar] [CrossRef]
- Keramea, P.; Spanoudaki, K.; Zodiatis, G.; Gikas, G.; Sylaios, G. Oil Spill Modeling: A Critical Review on Current Trends, Perspectives, and Challenges. J. Mar. Sci. Eng. 2021, 9, 181. [Google Scholar] [CrossRef]
- Zhao, L.; Nedwed, T.; Mitchell, D. Review of the Science behind Oil Spill Fate Models: Are Updates Needed? Int. Oil Spill Conf. Proc. 2021, 2021, 687874. [Google Scholar] [CrossRef]
- Gong, Y.; Zhao, X.; Cai, Z.; O’Reilly, S.E.; Hao, X.; Zhao, D. A Review of Oil, Dispersed Oil and Sediment Interactions in the Aquatic Environment: Influence on the Fate, Transport and Remediation of Oil Spills. Mar. Pollut. Bull. 2014, 79, 16–33. [Google Scholar] [CrossRef] [PubMed]
- Guyomarch, J.; Le Floch, S.; Merlin, F.-X. Effect of Suspended Mineral Load, Water Salinity and Oil Type on the Size of Oil–Mineral Aggregates in the Presence of Chemical Dispersant. Spill Sci. Technol. Bull. 2002, 8, 95–100. [Google Scholar] [CrossRef]
- Khelifa, A.; Stoffyn-Egli, P.; Hill, P.S.; Lee, K. Effects of Salinity and Clay Type on Oil–Mineral Aggregation. Mar. Environ. Res. 2005, 59, 235–254. [Google Scholar] [CrossRef]
- Wood, P.A.; Lunel, T.; Daniel, F.; Swannell, R.; Lee, K.; Stoffyn-Egli, P. Influence of Oil and Mineral Characteristics on Oil-Mineral Interaction. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Edmonton, AB, Canada, 10–12 June 1998. [Google Scholar]
- Khelifa, A.; Stoffyn-Egli, P.; Hill, P.S.; Lee, K. Characteristics of Oil Droplets Stabilized by Mineral Particles: Effects of Oil Type and Temperature. Spill Sci. Technol. Bull. 2002, 8, 19–30. [Google Scholar] [CrossRef]
- Zhang, H.; Khatibi, M.; Zheng, Y.; Lee, K.; Li, Z.; Mullin, J.V. Investigation of OMA Formation and the Effect of Minerals. Mar. Pollut. Bull. 2010, 60, 1433–1441. [Google Scholar] [CrossRef]
- Wang, W.; Zheng, Y.; Li, Z.; Lee, K. PIV Investigation of Oil–Mineral Interaction for an Oil Spill Application. Chem. Eng. J. 2011, 170, 241–249. [Google Scholar] [CrossRef]
- Khelifa, A.; Stoffyn-Egli, P.; Hill, P.S.; Lee, K. Characteristics of Oil Droplets Stabilized by Mineral Particles: The Effect of Salinity. Int. Oil Spill Conf. Proc. 2003, 2003, 963–970. [Google Scholar] [CrossRef]
- Le-Floch, S.; Guyomarch, J.; Merlin, F.-X.; Stoffyn-Egli, P.; Dixon, J.; Lee, K. The Influence of Salinity on Oil–Mineral Aggregate Formation. Spill Sci. Technol. Bull. 2002, 8, 65–71. [Google Scholar] [CrossRef]
- Kerebel, D. Study of the Influence of Salinity on the Flocculation Oil-Clay; Centre de Documentation de Recherche et D’Expérimentations sur les Pollutions Accidentelles des Eaux (Cèdre): Brest, France, 1997. [Google Scholar]
- Payne, J.R. Oil-Ice-Sediment Interactions during Freezeup and Breakup; US Department of Commerce, National Oceanic and Atmospheric Administration, Ocean Assessments Division, Alaska Office: Anchorage, AK, USA, 1989; Volume 64.
- Guyomarch, J.; Merlin, F.-X.; Bernanose, P. Oil Interaction with Mineral Fines and Chemical Dispersion: Behaviour of the Dispersed Oil in Coastal or Estuarine Conditions. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Ministry of Supply and Services, Ottawa, ON, Canada, 1 January 1999; Volume 1, pp. 137–150. [Google Scholar]
- Ma, X.; Cogswell, A.; Li, Z.; Lee, K. Particle Size Analysis of Dispersed Oil and Oil-mineral Aggregates with an Automated Ultraviolet Epi-fluorescence Microscopy System. Environ. Technol. 2008, 29, 739–748. [Google Scholar] [CrossRef]
- Sun, J.; Khelifa, A.; Zhao, C.; Zhao, D.; Wang, Z. Laboratory Investigation of Oil–Suspended Particulate Matter Aggregation under Different Mixing Conditions. Sci. Total Environ. 2014, 473–474, 742–749. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Khelifa, A.; Zheng, X.; Wang, Z.; So, L.L.; Wong, S.; Yang, C.; Fieldhouse, B. A Laboratory Study on the Kinetics of the Formation of Oil-Suspended Particulate Matter Aggregates Using the NIST-1941b Sediment. Mar. Pollut. Bull. 2010, 60, 1701–1707. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.; Li, Z.; King, T.; Kepkay, P.; Boufadel, M.C.; Venosa, A.D. Wave Tank Studies on Formation and Transport of OMA from the Chemically Dispersed Oil. In Oil Spill Response: A Global Perspective; Davidson, W.F., Lee, K., Cogswell, A., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 159–177. [Google Scholar]
- Khelifa, A.; Fingas, M.; Brown, C. Effects of Dispersants on Oil-SPM Aggregation and Fate in US Coastal Waters; Final Report Grant Number: NA04NOS4190063; Environment Canada: Ottawa, ON, Canada, 2008. [Google Scholar]
- Fu, J.; Gong, Y.; Zhao, X.; O’Reilly, S.E.; Zhao, D. Effects of Oil and Dispersant on Formation of Marine Oil Snow and Transport of Oil Hydrocarbons. Environ. Sci. Technol. 2014, 48, 14392–14399. [Google Scholar] [CrossRef] [PubMed]
- O’Laughlin, C.M.; Law, B.A.; Zions, V.S.; King, T.L.; Robinson, B.; Wu, Y. Settling of Dilbit-Derived Oil-Mineral Aggregates (OMAs) & Transport Parameters for Oil Spill Modelling. Mar. Pollut. Bull. 2017, 124, 292–302. [Google Scholar] [CrossRef]
- Sterling, M.C.; Bonner, J.S.; Ernest, A.N.S.; Page, C.A.; Autenrieth, R.L. Application of Fractal Flocculation and Vertical Transport Model to Aquatic Sol–Sediment Systems. Water Res. 2005, 39, 1818–1830. [Google Scholar] [CrossRef]
- Lee, K. Oil–Particle Interactions in Aquatic Environments: Influence on the Transport, Fate, Effect and Remediation of Oil Spills. Spill Sci. Technol. Bull. 2002, 8, 3–8. [Google Scholar] [CrossRef]
- Waterman, D.M.; Garcia, M.H. Laboratory Tests of Oil-Particle Interactions in a Freshwater Riverine Environment with Cold Lake Blend Weathered Bitumen; Ven Te Chow Hydrosystems Laboratory, University of Illinois: Champaign, IL, USA, 2015. [Google Scholar]
- Ye, L.; Manning, A.J.; Hsu, T.-J. Oil-Mineral Flocculation and Settling Velocity in Saline Water. Water Res. 2020, 173, 115569. [Google Scholar] [CrossRef]
- Bandara, U.C.; Yapa, P.D.; Xie, H. Fate and Transport of Oil in Sediment Laden Marine Waters. J. Hydro-Environ. Res. 2011, 5, 145–156. [Google Scholar] [CrossRef]
- Khelifa, A.; Lee, K.; Hill, P.S. Prediction of Oil Droplet Size Distribution in Agitated Aquatic Environments. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Edmonton, AB, Canada, 8–10 June 2004. [Google Scholar]
- Khelifa, A.; Lee, K.; Hill, P.S.; Ajijolaiya, L.O. Modelling the Effect of Sediment Size on OMA Formation. In Proceedings of the Arctic and Marine Oilspill Program Technical Seminar, Edmonton, AB, Canada, 8–10 June 2004. [Google Scholar]
- Sterling, M.C.; Bonner, J.S.; Page, C.A.; Fuller, C.B.; Ernest, A.N.S.; Autenrieth, R.L. Modeling Crude Oil Droplet—Sediment Aggregation in Nearshore Waters. Environ. Sci. Technol. 2004, 38, 4627–4634. [Google Scholar] [CrossRef]
- Zhao, L.; Boufadel, M.C.; Geng, X.; Lee, K.; King, T.; Robinson, B.; Fitzpatrick, F. A-DROP: A Predictive Model for the Formation of Oil Particle Aggregates (OPAs). Mar. Pollut. Bull. 2016, 106, 245–259. [Google Scholar] [CrossRef]
- Smoluchowski, M.V. Versuch Einer Mathematischen Theorie Der Koagulationskinetik Kolloider Lösungen. Z. Phys. Chem. 1918, 92, 129–168. [Google Scholar] [CrossRef] [Green Version]
- Pruppacher, H.R.; Klett, J.D. Microphysics of Clouds and Precipitation; Atmospheric and Oceanographic Sciences Library; Springer: Dordrecht, The Netherlands, 1980; Volume 284. [Google Scholar]
- Ernest, A.N.; Bonner, J.S.; Autenrieth, R.L. Determination of Particle Collision Efficiencies for Flocculent Transport Models. J. Environ. Eng. 1995, 121, 320–329. [Google Scholar] [CrossRef]
- Khelifa, A.; Hill, P.S.; Lee, K. Assessment of Minimum Sediment Concentration for OMA Formation Using a Monte Carlo Model. In Developments in Earth and Environmental Sciences; Al-Azab, M., El-Shorbagy, W., Eds.; Oil Pollution and its Environmental Impact in the Arabian Gulf Region; Elsevier: Amsterdam, The Netherlands, 2005; Volume 3, pp. 93–104. [Google Scholar]
- Hill, P.S.; Khelifa, A.; Lee, K. Time Scale for Oil Droplet Stabilization by Mineral Particles in Turbulent Suspensions. Spill Sci. Technol. Bull. 2002, 8, 73–81. [Google Scholar] [CrossRef]
- Ajijolaiya, L.O.; Hill, P.S.; Khelifa, A.; Islam, R.M.; Lee, K. Laboratory Investigation of the Effects of Mineral Size and Concentration on the Formation of Oil–Mineral Aggregates. Mar. Pollut. Bull. 2006, 52, 920–927. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Yanqiu, Z.; Zhiyu, Y.; Bing, S.; Hui, L. Adsorption Model of Oil Droplets Interacting with Suspended Particulate Materials in Marine Coastal Environments. Cont. Shelf Res. 2019, 173, 87–92. [Google Scholar] [CrossRef]
- Wu, Y.; Hannah, C.; Law, B.; King, T.; Robinson, B. An Estimate of the Sinking Rate of Spilled Diluted Bitumen in Sediment-Laden Coastal Waters. In Proceedings of the 39th AMOP Technical Seminar, Environment and Climate Change Canada, Ottawa, ON, Canada, 7–9 June 2016; pp. 331–347. [Google Scholar]
- Cui, L.; Harris, C.K.; Tarpley, D.R.N. Formation of Oil-Particle-Aggregates: Numerical Model Formulation and Calibration. Front. Mar. Sci. 2021, 8, 510. [Google Scholar] [CrossRef]
- Jones, L.; Garcia, M.H. Development of a Rapid Response Riverine Oil—Particle Aggregate Formation, Transport, and Fate Model. J. Environ. Eng. 2018, 144, 04018125. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, W.; Zhang, Y.; Yan, Z.; Liu, H.; Sun, B. A Practical Adsorption Model for the Formation of Submerged Oils under the Effect of Suspended Sediments. RSC Adv. 2019, 9, 15785–15790. [Google Scholar] [CrossRef] [Green Version]
- Niu, H.; Li, Z.; Lee, K.; Kepkay, P.; Mullin, J.V. Modelling the Transport of Oil–Mineral-Aggregates (OMAs) in the Marine Environment and Assessment of Their Potential Risks. Environ. Model. Assess. 2011, 16, 61–75. [Google Scholar] [CrossRef]
- Niu, H.; Lee, K. Study of the Dispersion/Settling of Oil-Mineral-Aggregates Using Particle Tracking Model and Assessment of Their Potential Risks. Int. J. Environ. Pollut. 2013, 52, 32–51. [Google Scholar] [CrossRef]
- Ouartassi, B.; Doyon, B.; Heniche, M. Numerical Prediction of Oil Mineral Aggregates Dispersion in the Estuary Of ST-Lawrence River. J. Phys. Conf. Ser. 2021, 1743, 012033. [Google Scholar] [CrossRef]
- Zhu, Z.; Waterman, D.M.; Garcia, M.H. Modeling the Transport of Oil–Particle Aggregates Resulting from an Oil Spill in a Freshwater Environment. Environ. Fluid Mech. 2018, 18, 967–984. [Google Scholar] [CrossRef]
- Winterwerp, J.C. A Simple Model for Turbulence Induced Flocculation of Cohesive Sediment. J. Hydraul. Res. 1998, 36, 309–326. [Google Scholar] [CrossRef]
- Li, Y.; Cao, R.; Chen, H.; Mu, L.; Lv, X. Impact of Oil−sediment Interaction on Transport of Underwater Spilled Oil in the Bohai Sea. Ocean Eng. 2022, 247, 110687. [Google Scholar] [CrossRef]
- Zhao, L.; Boufadel, M.C.; Adams, E.; Socolofsky, S.A.; King, T.; Lee, K.; Nedwed, T. Simulation of Scenarios of Oil Droplet Formation from the Deepwater Horizon Blowout. Mar. Pollut. Bull. 2015, 101, 304–319. [Google Scholar] [CrossRef]
- Niu, H.; Li, Z.; Lee, K.; Kepkay, P.; Mullin, J. A Method for Assessing Environmental Risks of Oil-Mineral-Aggregate to Benthic Organisms. Hum. Ecol. Risk Assess. Int. J. 2010, 16, 762–782. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Developer | References |
|---|---|---|
| COSMoS | Environment and Climate Change Canada (ECCC) | [43] |
| COZOIL | Department of the Interior Minerals Management Service | [45] |
| GNOME Suite | National Academies of Sciences, Engineering, and Medicine (NOAA) | [46] |
| GULFSPILL | KFUPM/RI | [47] |
| MEDSLIK/MEDSLIK-II | Oceanography Centre of the University of Cyprus (OC-UCY) | [48,49,50] |
| MIKE 21/3 | Danish Hydraulic Institute (DHI) | [51] |
| MOHID | MARETEC (Marine and Environmental Technology Research Center) | [52] |
| MOTHY | Météo-France | [53] |
| OILMAP/SIMAP | ASA | [54,55] |
| OILTRANS | The Atlantic Regions’ Coastal Pollution Response (ARCOPOL) | [56] |
| OpenDrift/OpenOil | Norwegian Meteorological Institute | [13,14] |
| OSCAR | SINTEF | [57] |
| OSRA | Bureau of Ocean Energy Management (BOEM) | [58,59,60] |
| POSEIDON-OSM | Hellenic Centre for Marine Research (HCMR) | [61,62] |
| SPILLCALC | Tetra Tech EBA | [44] |
| References | Main Objectives/Methods | Results |
|---|---|---|
| [21] | To measure OMA settling velocities using a focused flow reactor | Settling velocities ranging from 2.2 to 10.4 mm/s for 100–200 μm OMA |
| [87] | Settling velocity tests conducted in a 1.6 m height Plexiglass settling column. | Settling velocities between 1.0–11.2 mm/s, with the most in the between 1.0 and 3.0 mm/s. |
| [84] | Sediment concentration influences settling velocity | Higher concentration of suspended sediment (10 vs. 50 mg/L) means greater settling velocity and effective particle density |
| [88] | To explore effects of clay type on OMA structure and settling velocity using the LabSFLOC-2 system and digital microscopy | For low stickiness Kaolinite clay, OMA settling velocity was about twice as small as for pure Kaolinite flocs; for high stickiness Bentonite clay, the OMA settling velocity was greater than for pure Bentonite flocs |
| Equation | Equations | Denote | References |
|---|---|---|---|
| (1) | are the particle concentrations for the particles of size i and j, respectively. | [94] | |
| (2) | . | [92,93,96] | |
| (3) | is the interaction term due to coagulation. | [96] | |
| (4) | are probabilities of successful aggregation through contacting floc constituent types 1-1, 2-2, and 1-2. | [92] | |
| (5) | = source/sink term for the ith species due to partitioning. | [89] | |
| (6) | is a factor to account for particle shape and packing effects on the coagulation process. | [93] | |
| (7) | rl, otherwise an aggregation event is selected. | [90,91,97] | |
| (8) | is the dissipation rate. v is the kinematic viscosity of water. | [98] | |
| (9) | 85%. | [99] | |
| (10) | is a distribution coefficient. SPM is the sediment concentration. | [100] | |
| (11) | are the maximum and minimum radii of the oil droplets. s = 2.3 based on laboratory data. | [101] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, X.; Niu, H.; Li, P.; Wu, Y.; Liu, L. An Overview of Oil-Mineral-Aggregate Formation, Settling, and Transport Processes in Marine Oil Spill Models. J. Mar. Sci. Eng. 2022, 10, 610. https://doi.org/10.3390/jmse10050610
Zhong X, Niu H, Li P, Wu Y, Liu L. An Overview of Oil-Mineral-Aggregate Formation, Settling, and Transport Processes in Marine Oil Spill Models. Journal of Marine Science and Engineering. 2022; 10(5):610. https://doi.org/10.3390/jmse10050610
Chicago/Turabian StyleZhong, Xiaomei, Haibo Niu, Pu Li, Yongsheng Wu, and Lei Liu. 2022. "An Overview of Oil-Mineral-Aggregate Formation, Settling, and Transport Processes in Marine Oil Spill Models" Journal of Marine Science and Engineering 10, no. 5: 610. https://doi.org/10.3390/jmse10050610
APA StyleZhong, X., Niu, H., Li, P., Wu, Y., & Liu, L. (2022). An Overview of Oil-Mineral-Aggregate Formation, Settling, and Transport Processes in Marine Oil Spill Models. Journal of Marine Science and Engineering, 10(5), 610. https://doi.org/10.3390/jmse10050610