1. Introduction
Morphodynamic modelling is used to understand and predict the evolution of coastal features such as beaches, dunes and sandbars. This is important for a range of coastal engineering applications, including assessment of damage during extreme events, mitigation of coastal erosion, the design of coastal structures, assessment of different protection strategies, and the generation of possible future scenarios to use in coastal zone management (see, e.g., [
1,
2,
3,
4,
5]). In addition, beach morphology is influenced by rivers and streams beyond the coastal area, forming what has been referred to as the Watershed–Coast System [
6], the integrated modelling of which is becoming increasingly important in the context of climate change [
7].
A good predictive model should contain relevant physical features and obtain a stable numerical solution while expending a reasonable amount of computational effort. Ideally, all temporal and spatial scales should be included; however, limits on computational resources mean that in practice compromises have to be made between what is desirable and what is possible [
8]. This is particularly important for engineering applications, as several iterations of a planned intervention may be necessary before further decisions by policy makers and stakeholders can be made (see, e.g., [
9]). The problem of large computational effort in morphodynamic modelling is compounded by the fact that there is a significant mismatch between the characteristic timescales associated with the relevant hydrodynamic and morphological changes, which are the two main physical mechanisms involved. While the hydrodynamics of short waves, for example, are associated with time scales of a few seconds, changes in beach morphology are typically only appreciable after a few hours [
10,
11,
12]. Morphodynamic models commonly consist of a coupled system of equations representing the hydrodynamic and morphological evolution (see below). Therefore, when these equations are solved numerically, many computations need to be performed (numerical time integration) in order to produce a limited effect on the morphology, making morphodynamic simulations long and inefficient [
10]. While this may not be particularly problematic for short-term simulations (e.g., a short storm event), long-term predictions can easily become unfeasible without adoption of morphological acceleration strategies that bridge the timescale gap between hydrodynamic and morphological processes [
11,
12,
13].
Conventional morphodynamic models consist of a coupled system of equations for the evolution of hydrodynamic quantities (e.g., the Shallow Water Equations) and bed morphology (e.g., the Exner equation), with the coupling between these two taking place via sediment transport formulae, typically empirical expressions relating hydrodynamic variables to sediment transport rates. An example of a popular morphodynamic model within the coastal engineering community is XBeach [
14,
15], which is employed to simulate nearshore hydrodynamic and morphodynamic processes and has been extensively validated (see, e.g., [
16,
17,
18,
19,
20]). As with most morphodynamic models, XBeach solves the hydrodynamic and bed-update equations sequentially, either updating the bed at every numerical time step (no acceleration) or only after a certain number of time integration steps have been performed on the hydrodynamic equations, which allows the simulated morphological evolution to be accelerated. Another popular software package employed in hydro-morphodynamic simulations is Delft3d-FLOW, which treats morphological evolution in a very similar manner to XBeach [
21]. Next, various strategies for morphodynamic acceleration are discussed in detail.
Latteux [
13] has described several methods for reducing computational cost in tide-dominated morphodynamic problems. These simple yet pragmatic methods include: input reduction, whereby a series of tides are replaced by a smaller set of representative tides (which would ideally cause the same morphological changes as the actual tidal cycles being considered), thereby saving the computational cost of recomputing the hydrodynamics; schematisation of flow perturbations induced by bed changes, where, e.g., the effects of bed evolution on the hydrodynamics may be simply disregarded; and various techniques for increasing the morphological time step, which vary from, e.g., extrapolating the bed changes observed during one tidal cycle to
N number of tides, to artificially lengthening a tide by a factor of
N in order to model the effect of
N tides, thereby yielding slower-varying hydrodynamics that enable larger numerical time steps. These methods and variations of them have been further discussed by Roelvink [
12]; for example, the use of a ‘continuity correction’ within a tide-average method, which reduces the number of hydrodynamic computations by considering flow patterns (though not necessarily the values of hydrodynamic quantities) that can be held constant despite the bathymetry continuing to evolve. Another similar technique is the so-called Rapid Assessment of Morphology [
22,
23]. All of these methods are underpinned by the presence of a clear periodic pattern in the driving hydrodynamics, i.e., tides; however, they cannot be easily generalised to arbitrary morphodynamic problems. This is partly remedied by the ‘parallel online’ approach proposed by Roelvink [
12], which accounts for intra-tidal changes to conditions such as waves and wind by carrying out parallel computations subject to different hydrodynamic drivers, then updating the bed based on a weighted average of all the scenarios. A more general approach is the use of a ‘morphological factor’ [
2], which simply amplifies the rate of change in the bed (
) by a constant factor
, i.e.,
. This method avoids the need to store and average the data, a feature common to several methods discussed above, and enables the simultaneous computation of the hydrodynamics, sediment transport, and bed evolution equations. Due to its simplicity and robustness, this method is widely used (see, e.g., [
2,
10,
24,
25]) and is the technique built into XBeach and Delft3d-FLOW for accelerating morphodynamic simulations; in the latter case, the ‘morphological factor’ may be prescribed as a time-varying parameter.
The use of a morphological acceleration factor presents several advantages with respect to the other techniques discussed above. For example, the lack of ‘continuity correction’ means that processes in shallow water, where flow behaviour is particularly sensitive to topographic and frictional effects, can be modelled more accurately. Furthermore, the bed is evolved in relatively small time steps even when large values of
are used, which in turn can significantly reduce the computational time required to perform a long-term simulation. The use of relatively small morphological time steps means that the results tend to be more accurate than in other approaches, provided that the bed evolution does not deviate too far from a linear trend [
12]. Naturally, the maximum value of
to be used should be established through a sensitivity analysis [
2,
11]. Previous works on tide-dominated morphodynamics [
2,
10] have concluded that values of
of up to 100 may be employed without significantly impacting the quality of the results. This conclusion partly reflects the well-known fact that morphological timescales are typically much larger than hydrodynamic ones. Limitations of the constant morphological acceleration factor approach include the requirement for a linear trend in the bed evolution [
25] and the condition that hydrodynamic processes must occur on a significantly shorter timescale than morphological changes [
24], with the latter being a common limitation of morphological acceleration methods.
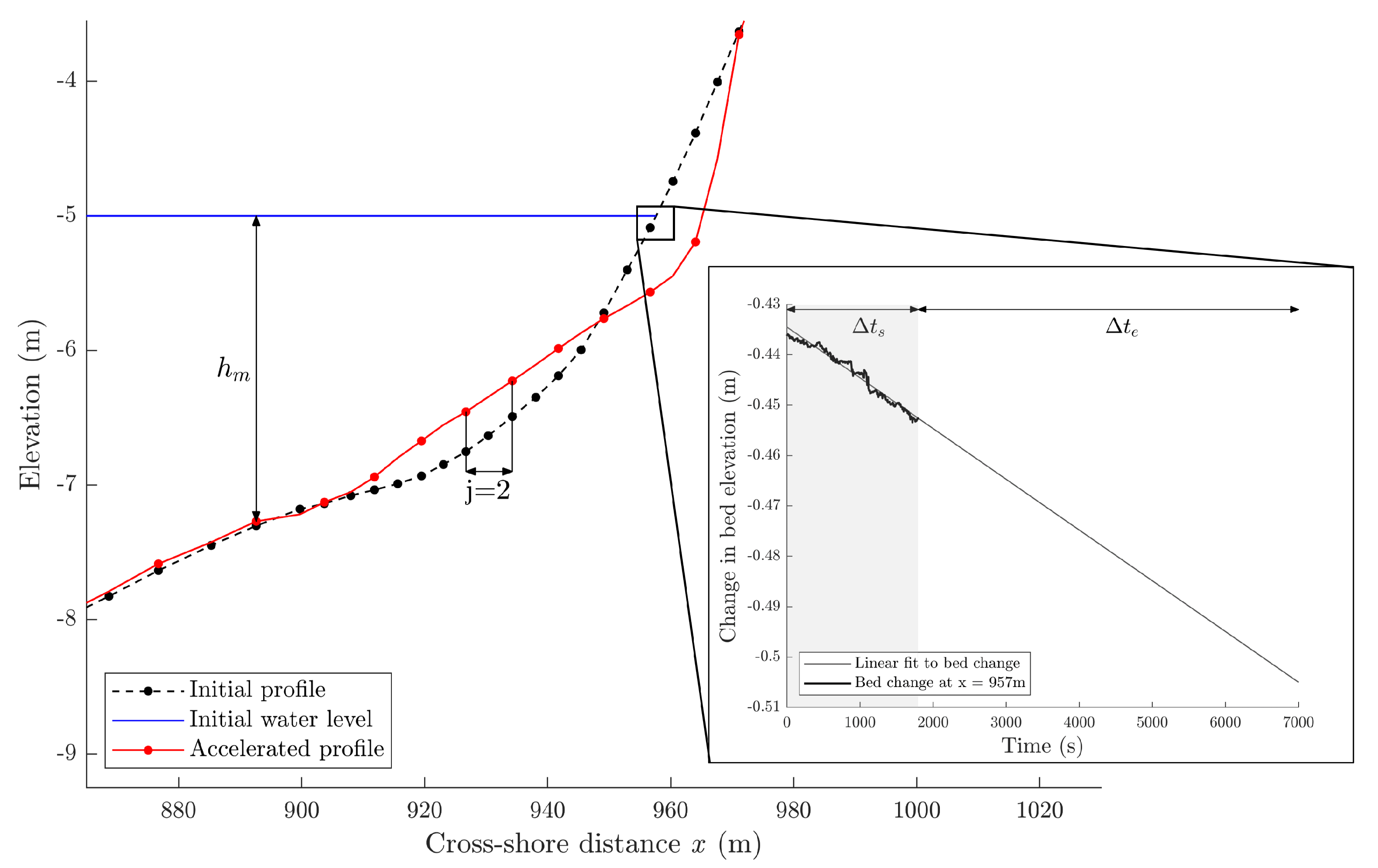
While the computational power available to coastal scientists and engineers continues to increase, the fundamental issue with morphodynamic simulations arising from the significant mismatch in hydrodynamic and morphological timescales continues to pose a major limitation for long-term predictions. We note that prominent techniques for morphological acceleration have remained virtually unchanged for decades. Therefore, we revisit this topic and propose a new method for accelerating morphological simulations. Rather than imposing a global measure for acceleration, such as , the proposed method treats different points on the bed (in this case, a beach profile) independently. By tracking local instantaneous trends in changes to the bed level, these changes can be accelerated via extrapolation of the observed trends. The criteria used for such extrapolation are arrived at through a sensitivity analysis within a parameter space spanning realistic values of the relevant variables. In this paper, these criteria are fine tuned for the specific case of wave forcing; however, generalisation or adaptation to other hydrodynamic drivers is possible. The proposed algorithm is employed here to accelerate simulations produced via XBeach (chosen due to its robustness and popularity), with its inbuilt acceleration method (the constant morphological factor, or morfac) employed as a reference for comparison.
The rest of the paper is organised as follows:
Section 2.1 describes the proposed algorithm; the beach profiles used to test the acceleration algorithm and the iterative process used to fine tune the relevant parameters are discussed in
Section 2.2 and
Section 2.3, respectively; the results and associated discussions are presented in
Section 3 and
Section 4, respectively; and final remarks are provided in
Section 5.
3. Results
In this section, the results of morphodynamic simulations accelerated via the proposed algorithm while using the recommended values of the
-dependent variables shown in
Table 2 are compared against simulations accelerated using XBeach
morfac. The value of
morfac for each scenario is set equal to the ratio of
used in our acceleration algorithm; for example, as the Linear Steep test profile has an
value greater than
, we use
s and
. Therefore, we compare this profile against a
morfac value of 2. The accuracy of both acceleration techniques is assessed relative to the full (non-accelerated) morphodynamic simulation, as detailed next.
Figure 4,
Figure 5,
Figure 6 and
Figure 7 illustrate the comparison between acceleration approaches from different perspectives.
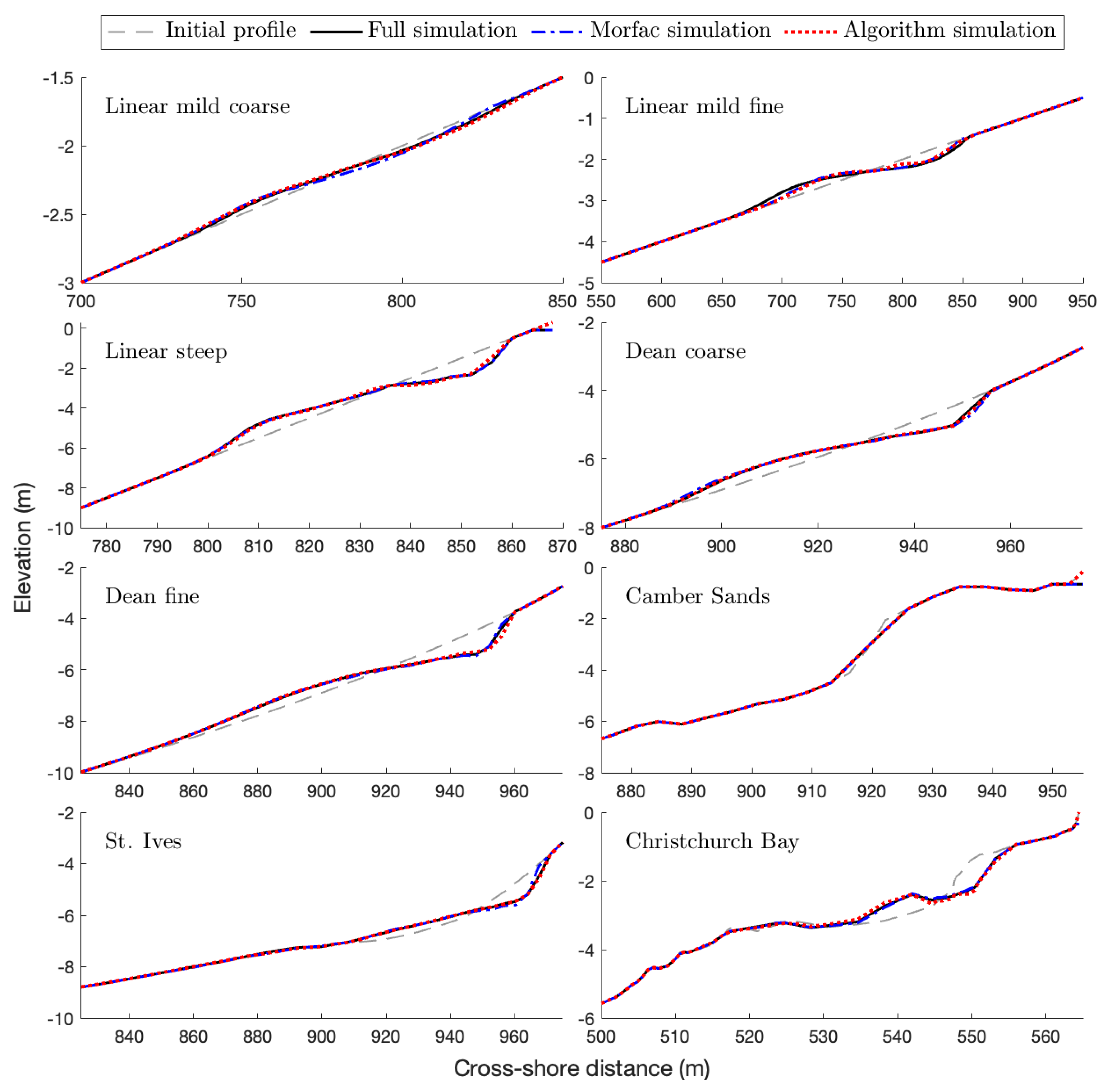
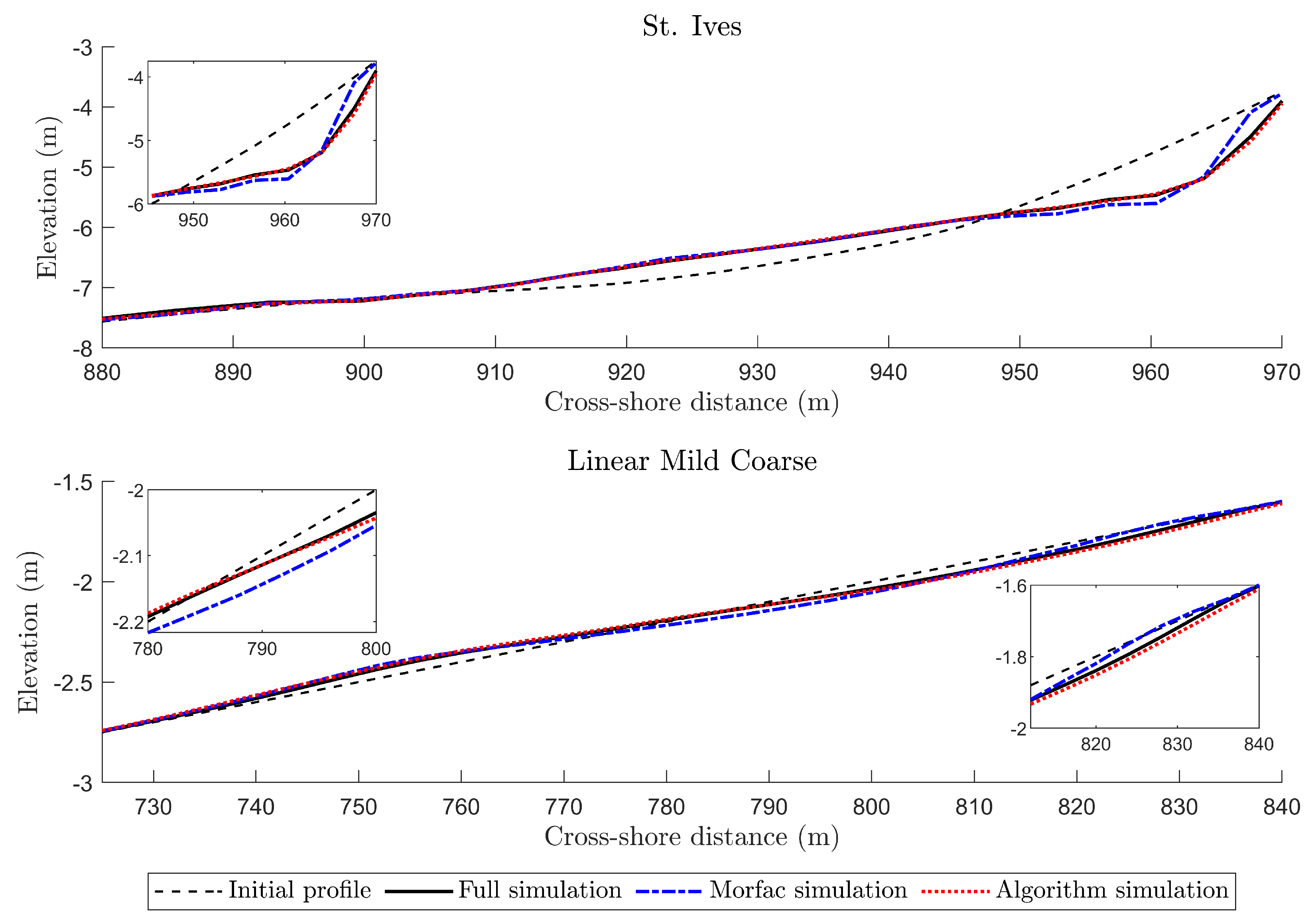
Figure 4 shows the predictions by both methods for all eight profiles considered. To enhance clarity,
Figure 5 provides a qualitative comparison for the St. Ives and Linear Mild Coarse test profiles only, illustrating that while both approaches yield good predictions, the algorithm proposed here outperforms
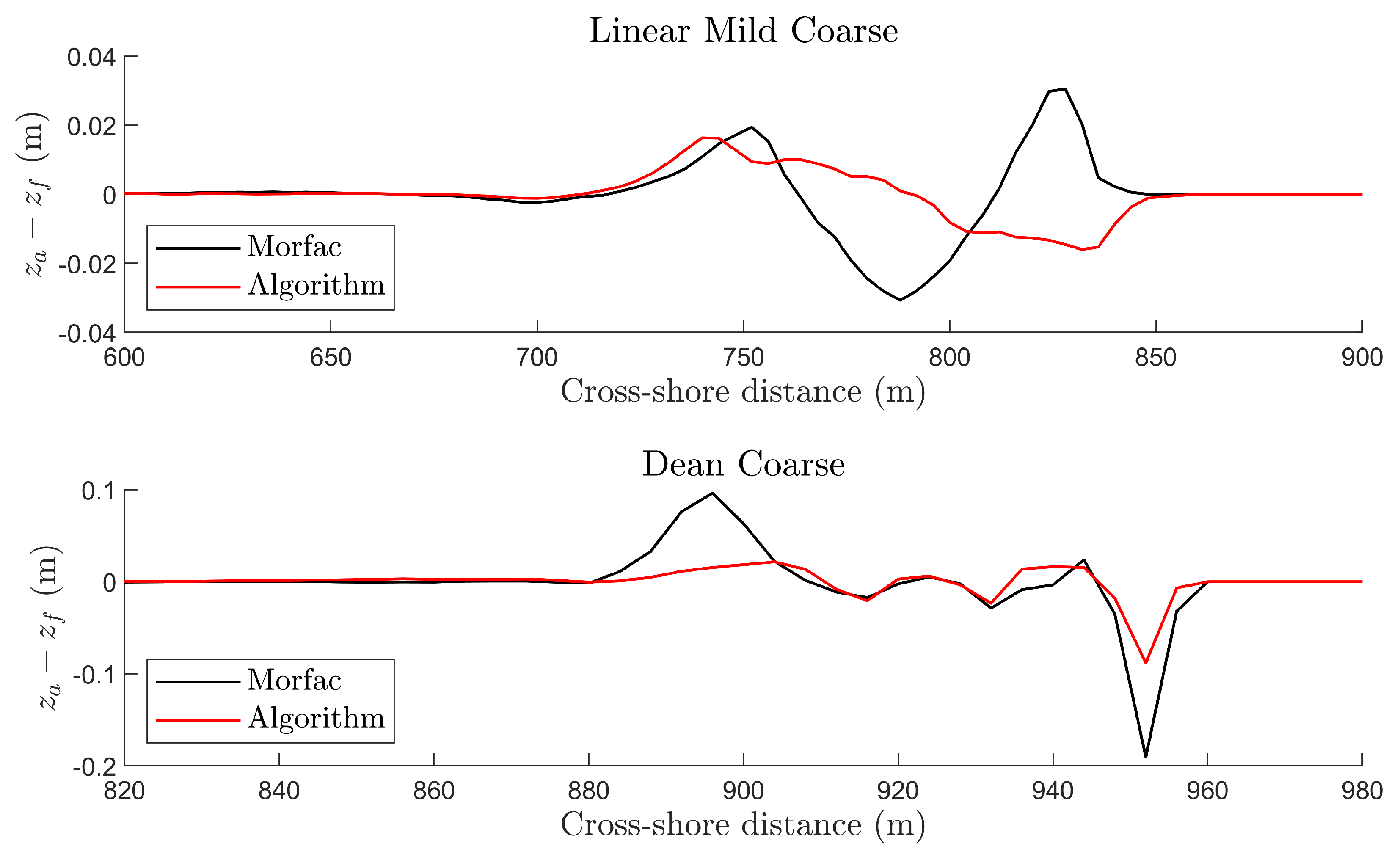
morfac in these two cases. A more quantitative comparison is shown in
Figure 6, where only the difference between the accelerated profiles and the non-accelerated one for the Linear Mild and Dean profiles with coarse sediment is presented. A comprehensive comparison including all profiles is shown in
Figure 7, which depicts the BSS for both methods and all profiles considered. From this figure it can be concluded that the proposed algorithm generally outperforms
morfac. However, when considering the error bars representing the maximum and minimum BSS arising from five repetitions of each simulation, the performance of both methods can be said to be similar (for more details, see
Section 4). While it is difficult to formulate an explanation of why
morfac performs better for certain profiles, two potential reasons are worth exploring. First, this could be due to the heuristic calibration of the propsed algorithm, which is more refined for smaller values of
, while
morfac seems to perform better for larger values of
. Second,
morfac outperforms our algorithm in profiles where the onshore boundary shows a clear mismatch with the reference profile, such as Camber Sands and Christchurch Bay in
Figure 4, which has an impact in terms of the BSS. This is a consequence of the requirement to fix this point. This problem has a simple practical solution: the onshore boundary can always be selected to be far enough to ensure that there is no influence of the waves on the morphology of this boundary. In fact, doing this is generally recommended in order to avoid numerical issues arising from the boundary conditions employed.
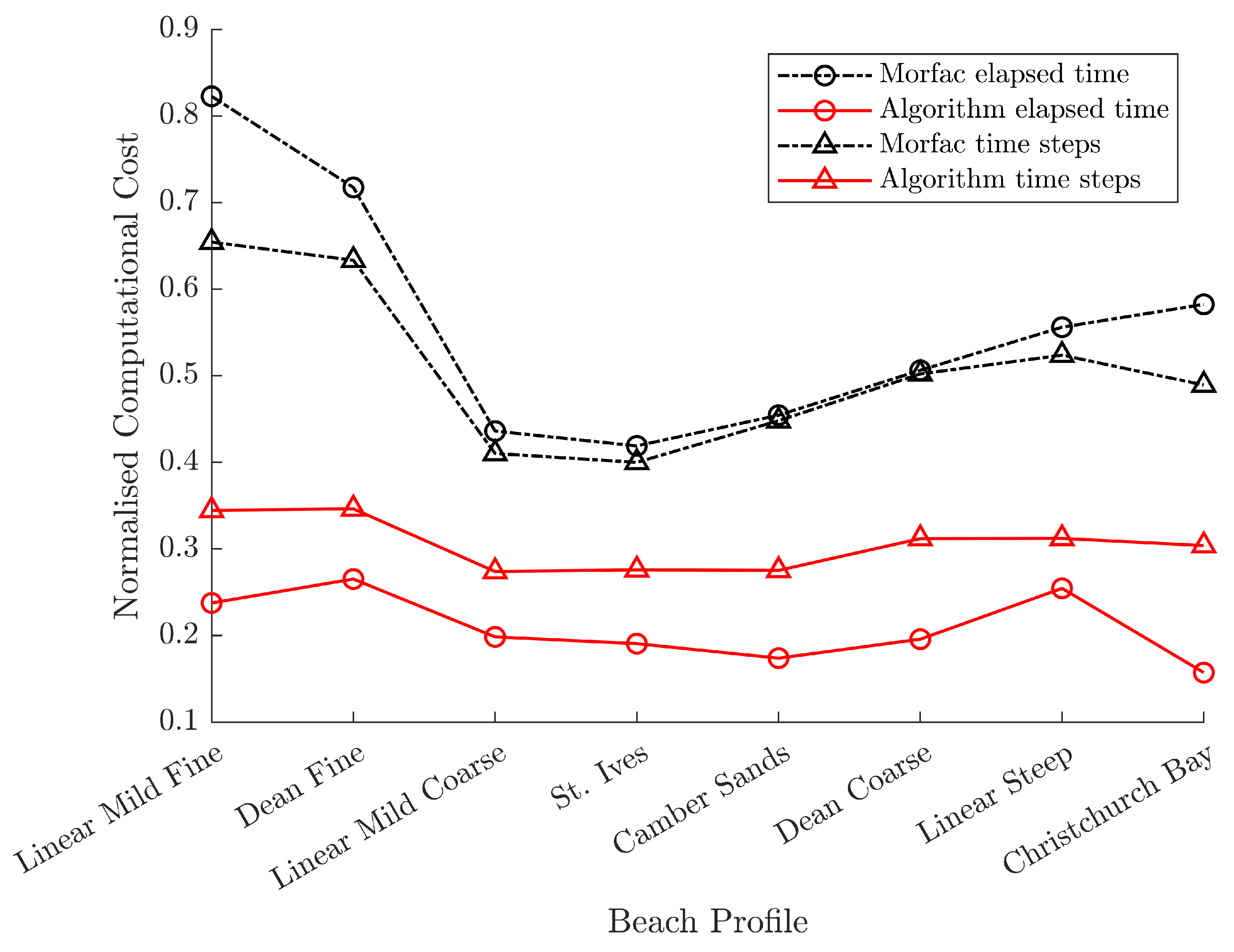
In addition to yielding accurate predictions, an acceleration approach must of course be evaluated based on its reduction of computational demands. We do this via two metrics. The first one is the total computational time, or computer elapsed time. This metric has an important caveat, in that
morfac is built into the XBeach hydro-morphodynamic solver, while the proposed algorithm was programmed externally in MATLAB. Thus, the total computational cost includes the time required by XBeach to print the files, the time needed to communicate between XBeach and MATLAB, etc. This could make the total computational time favourably biased towards
morfac. Thus, we introduce the total number of numerical time steps reported by XBeach, which is a more computer-independent proxy for the total computational cost of the simulation. Both metrics are normalised using the computational cost of the full simulation; for reference, we used a standard laptop with an Intel Core i5 processor and 8 GB of RAM. The results are shown in
Figure 8. The proposed algorithm consistently outperforms
morfac in terms of computational cost savings, with reductions in computational costs of up to 3.7 times larger than
morfac (see Christchurch Bay). The reduction in numerical time steps provided by the algorithm is on average about 30% less than the approximate prediction presented in
Section 2.1.2, i.e., a predicted reduction by a factor of approximately
.
4. Discussion
On average, the algorithm-accelerated simulations were 9% more accurate, required 61% fewer time steps, and were 38% faster than the simulations accelerated using morfac. For the profiles where the algorithm was less accurate than morfac, the BSS of the algorithm was very high (greater than 0.8). Furthermore, the time saving of the algorithm shows less dependence on the profile (or more specifically, on the erodibility of the profile) than morfac. These metrics indicate that, for the profiles tested here, the algorithm proposed in this paper provides an improvement over a widely used method to accelerate morphodynamic simulations.
While it cannot be claimed that the proposed algorithm is always more accurate than the simple and popular technique
morfac employed by XBeach, we believe that there are several arguments to put forward this algorithm as a promising alternative for accelerating morphodynamic simulations. First, while the accuracy of predictions as measured by the BSS is generally similar between both approaches, the algorithm consistently shows a larger reduction in computational time, a key feature that any acceleration method must present. This potential for computational time reduction is expected to become significantly more important for 2D problems. Second, the accuracy of the proposed algorithm shows less dependence on the profile under consideration (or rather the erodibility, as defined herein) compared to
morfac, presenting larger promise for generalisation to arbitrary morphodynamic problems. Third, while the algorithm parameters have been carefully tuned as described in
Section 2.3, this tuning is only heuristic; i.e., there is no guarantee that the recommended values are (anywhere near) optimal and the process is ultimately dependent of the set of profiles selected. In future work, this may be remedied by carrying out a more exhaustive exploration of the parameter space spanned by all relevant variables, perhaps making use of machine learning techniques. This could further improve the performance of the algorithm. Evidently, the conclusions obtained herein are the result of a limited (though diverse) set of beach profiles and forcing conditions; in the future, a more comprehensive comparison might include a larger set of beach profiles, event durations, and hydrodynamic conditions.
A disadvantage of our algorithm with respect to the simple
morfac method is its relative complexity of implementation. However, to mitigate this potential weakness, we have made the codes freely available at
https://github.com/sergio-maldonado/morpho_accelerate, and invite the community to use and further optimise them. The present paper has focused on the specific problem of beach profile evolution due to waves. This has been used as a way to introduce and illustrate the acceleration algorithm. However, the algorithm can be easily adapted to other morphodynamic problems by following the steps described here: first, define an erodibility parameter related to the problem at hand (e.g., for tidal inlets,
in Equation (
1) can be replaced by the tidal amplitude), then carry out a variable tuning procedure such as the one described in
Section 2.3. Naturally, the actual values of the variables may vary widely depending on the morphodynamic problem under consideration; for example, for very slowly varying morphologies, much larger values of
than those presented here may be achievable. Similarly, the algorithm may in principle be adapted to account for nature-based solutions, e.g., by accounting for the presence of vegetation in the definition of
; for example, in keeping with the present definition, variables whose increasing values tend to reduce erosion within the model employed, such as vegetation drag coefficient or canopy density, could be included in the numerator.
In the context of coastal adaptation to inherently uncertain future scenarios due to climate change and sea level rise, approaches that can rapidly explore long-term predictions of beach evolution (often of around 50 years; see, e.g., [
34,
35,
36]) are crucial, especially because several scenarios must typically be considered [
37]. The same is true for the modelling of larger spheres beyond the coast, e.g., the watershed–coast system, the integrated modelling of which is expected to become particularly important in the context of climate change [
7]. This is because of the pressure that climate change can place on such systems, potentially leading to consequences extending beyond coastal morphology and into the fields of socio-economics or cultural heritage [
38,
39]. Noting that methods for speeding up morphodynamic simulations have remained virtually unchanged for decades, we propose a novel algorithm that represents a refreshing addition to the toolbox available to coastal scientists and engineers. The proposed algorithm represents a versatile tool that may in principle be generalised to arbitrary morphodynamic problems. It shows the potential to yield predictions with similar accuracy to those of the popular
morfac method while consistently demonstrating superior capabilities in terms of computational time reduction.
5. Conclusions
There exists a very large gap between the timescales associated with hydrodynamic and morphological processes in the coastal environment. Because of this, coastal morphodynamic simulations tend to be computationally costly. This has motivated researchers to propose various methods of accelerating the morphological evolution process in order to reduce the computational cost of simulations. Most of these methods, which have not been revised for decades, rely on the presence of a clear periodic pattern in the hydrodynamics, e.g., tides, and apply a global measure to the bed, as is the case in XBeach’s
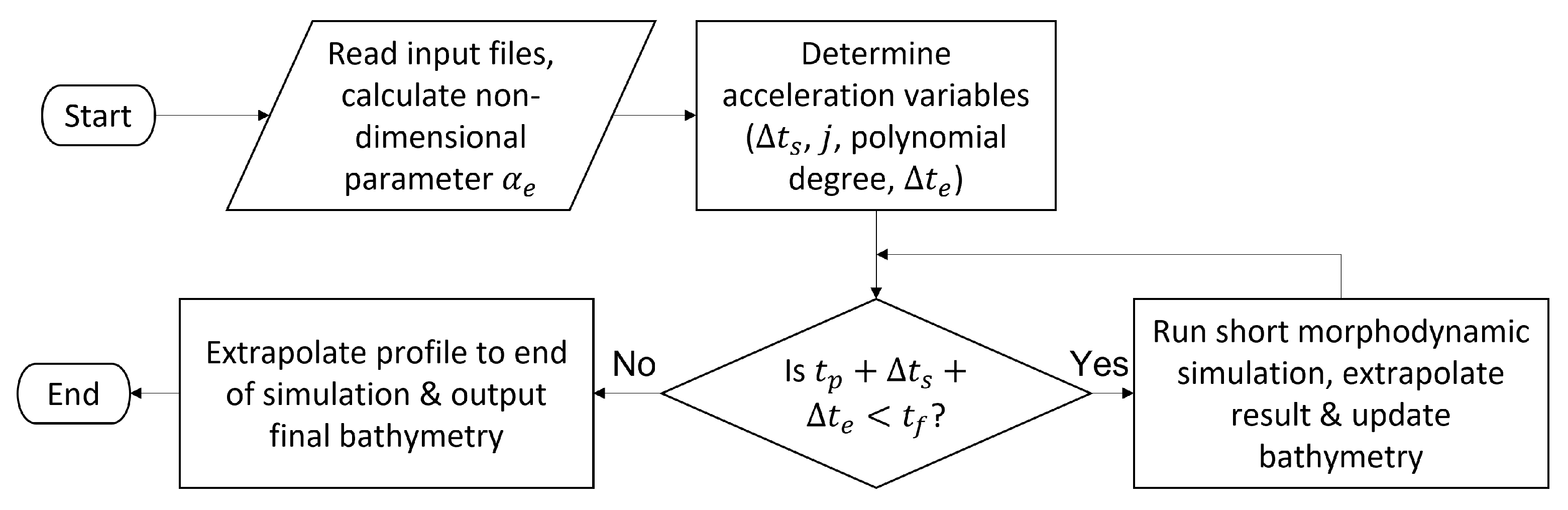
morfac. In this paper, we propose a novel method for speeding up coastal morphodynamic simulations. Our proposed algorithm breaks up a simulation into a series of cycles, wherein a non-accelerated simulation stage is followed by an extrapolation stage. During the first non-accelerated simulation stage, the algorithm tracks local changes to the bed; then, during the second stage, it extrapolates the observed trends in time, feeding the extrapolated bed profile back to the hydro-morphodynamic solver. These cycles repeat until the final simulation time is reached. The algorithm requires the setting of four different parameters. Through an extensive calibration process, we obtained recommended (though not necessarily optimal) values of these parameters as a function of a non-dimensional variable defined in relation to the bed’s erodibility (
; see Equation (
1)). We tested the proposed algorithm on eight different beach profiles, including linear, Dean, and measured field profiles, and compared its performance against that of the popular
morfac acceleration method built into XBeach. While both the proposed algorithm and
morfac yield accelerated profiles with comparable accuracy, the former consistently shows a greater reduction in computational time as assessed by two different metrics. What is more, the proposed method can be further optimised by carrying out more comprehensive calibration of the algorithm parameters, and can in principle be adapted to various other coastal morphodynamic problems, including the use of nature-based solutions, via appropriate redefinition of
. In light of the continued need for rapid simulations of coastal evolution for long-term predictions, particularly in the context of adaptation to uncertain climate change scenarios, we believe that the proposed method represents a promising addition to the toolbox employed by the community of coastal scientists, engineers, and policy makers.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}