
UMGAN: Underwater Image Enhancement Network for Unpaired Image-to-Image Translation



Abstract
:1. Introduction
2. Related work
2.1. Underwater Image Enhancement
2.2. Deep Learning Methods
3. Materials and Methods
3.1. Underwater Image Quality Measure Feedback
3.2. Noise Reduction Network
3.3. Global–Local Discriminators
3.4. Loss Function
3.4.1. UIQM Loss
3.4.2. Adversarial Loss (Global–Local)
3.4.3. Cycle Consistency Loss
3.4.4. SSIM Loss
4. Discussion
4.1. Dataset and Implementation Details
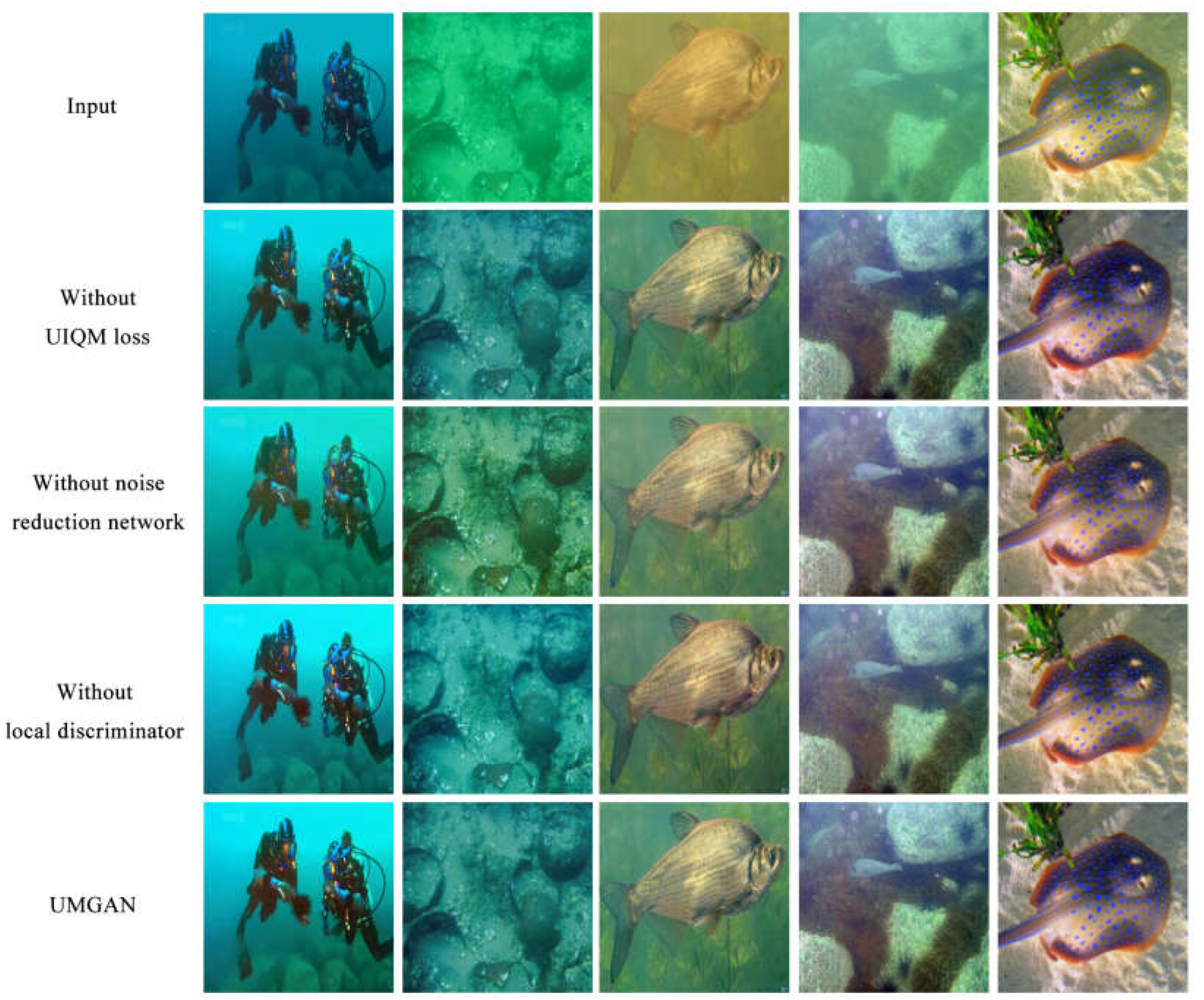
4.2. Ablation Study
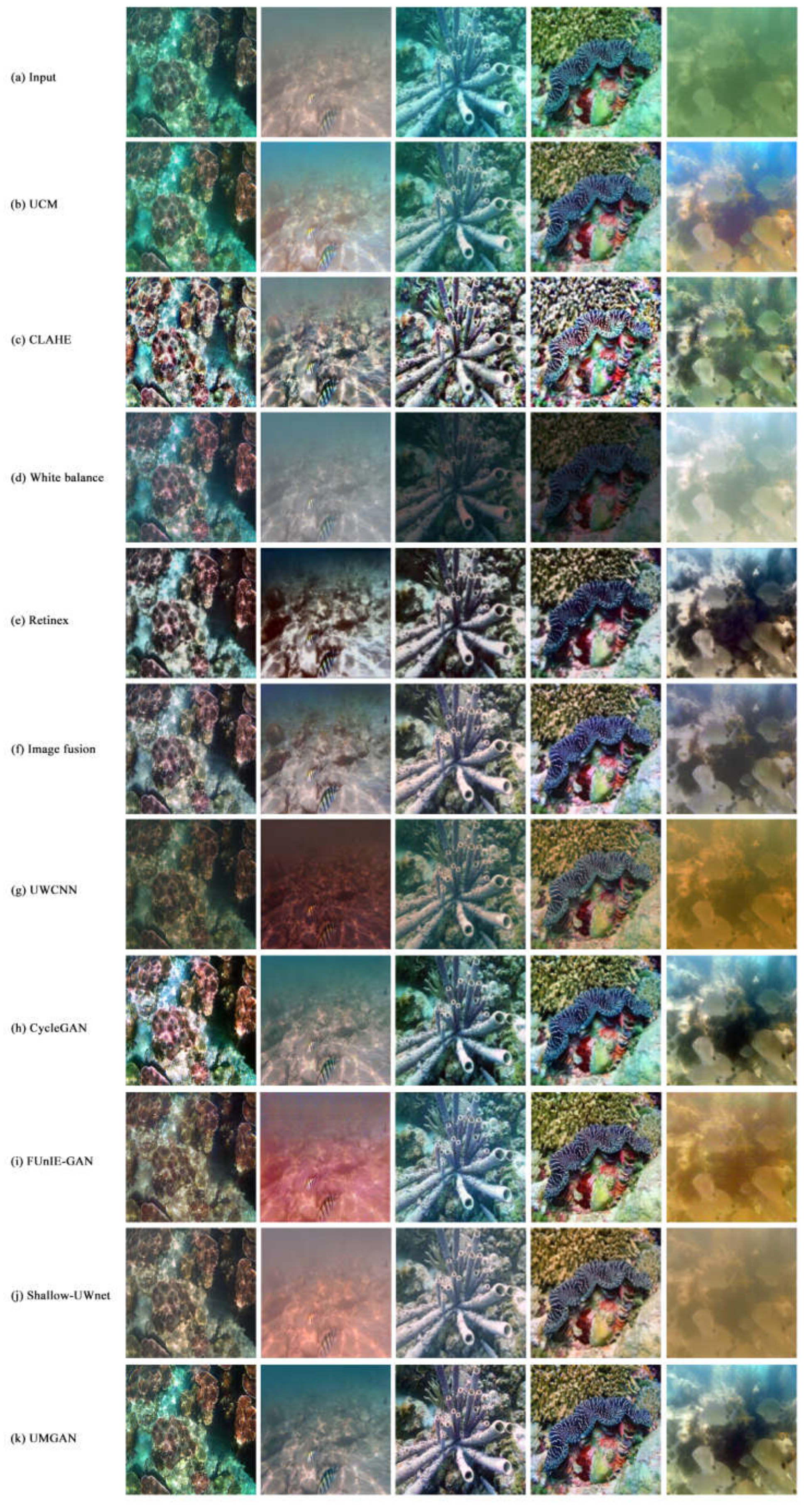
4.3. Qualitative Evaluation
4.4. Quantitative Evaluation
4.5. Results and Significance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Raveendran, S.; Patil, M.D.; Birajdar, G.K. Underwater image enhancement: A comprehensive review, recent trends, challenges and applications. Artif. Intell. Rev. 2021, 54, 5413–5467. [Google Scholar] [CrossRef]
- Han, M.; Lyu, Z.; Qiu, T.; Xu, M. A Review on Intelligence Dehazing and Color Restoration for Underwater Images. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 50, 1820–1832. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Zhang, Y.; Chen, M.; Serikawa, S.; Kim, H. Underwater Optical Image Processing: A Comprehensive Review. Mob. Netw. Appl. 2017, 22, 1204–1211. [Google Scholar] [CrossRef] [Green Version]
- Iqbal, K.; Odetayo, M.O.; James, A.E.; Salam, R.A.; Talib, A.Z. Enhancing the low quality images using Unsupervised Colour Correction Method. In Proceedings of the 2010 IEEE International Conference on Systems, Man and Cybernetics, Istanbul, Turkey, 10–13 October 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Abdul, G.A.; Mat, I.N. Underwater image quality enhancement through composition of dual-intensity images and Rayleigh-stretching. Springerplus 2014, 3, 757. [Google Scholar] [CrossRef] [Green Version]
- Vasamsetti, S.; Mittal, N.; Neelapu, B.C.; Sardana, H.K. Wavelet based perspective on variational enhancement technique for underwater imagery. Ocean. Eng. 2017, 141, 88–100. [Google Scholar] [CrossRef]
- Priyadharsini, R.; Sharmila, T.S.; Rajendran, V. A wavelet transform based contrast enhancement method for underwater acoustic images. Multidimens. Syst. Signal Process. 2018, 29, 1845–1859. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, T.; Dong, J.; Yu, H. Underwater image enhancement via extended multi-scale Retinex. Neurocomputing 2017, 245, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Fu, X.; Zhuang, P.; Yue, H.; Liao, Y.; Zhang, X.P.; Ding, X. A retinex-based enhancing approach for single underwater image. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014. [Google Scholar]
- Ancuti, C.O.; Ancuti, C.; De Vleeschouwer, C.; Bekaert, P. Color Balance and Fusion for Underwater Image Enhancement. IEEE Trans. Image Process. 2018, 27, 379–393. [Google Scholar] [CrossRef] [Green Version]
- Ghani, A.S.A.; Nasir, A.F.A.; Tarmizi, W.F.W. Integration of enhanced background filtering and wavelet fusion for high visibility and detection rate of deep sea underwater image of underwater vehicle. In Proceedings of the 2017 5th International Conference on Information and Communication Technology (ICoIC7), Melaka, Malaysia, 17–19 May 2017. [Google Scholar] [CrossRef]
- Merugu, S.; Tiwari, A.; Sharma, S.K. Spatial–Spectral Image Classification with Edge Preserving Method. J. Indian Soc. Remote Sens. 2021, 49, 703–711. [Google Scholar] [CrossRef]
- Shaik, A.S.; Karsh, R.K.; Islam, M.; Laskar, R.H. A review of hashing based image authentication techniques. Multimed. Tools Appl. 2022, 81, 2489–2516. [Google Scholar] [CrossRef]
- Shaik, A.S.; Karsh, R.K.; Islam, M.; Singh, S.P. A Secure and Robust Autoencoder-Based Perceptual Image Hashing for Image Authentication. Wirel. Commun. Mob. Comput. 2022, 2022, 1645658. [Google Scholar] [CrossRef]
- Karsh, R.K. LWT-DCT based image hashing for image authentication via blind geometric correction. Multimed. Tools Appl. 2022, 81, 1–19. [Google Scholar] [CrossRef]
- Shaheen, H.; Ravikumar, K.; Anantha, N.L.; Kumar, A.U.S.; Jayapandian, N.; Kirubakaran, S. An efficient classification of cirrhosis liver disease using hybrid convolutional neural network-capsule network. Biomed. Signal Process. Control 2023, 80, 104152. [Google Scholar] [CrossRef]
- Li, J.; Skinner, K.A.; Eustice, R.M.; Johnson-Roberson, M. WaterGAN: Unsupervised Generative Network to Enable Real-time Color Correction of Monocular Underwater Images. IEEE Robot. Autom. Lett. 2017, 3, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Guo, J.; Guo, C. Emerging From Water: Underwater Image Color Correction Based on Weakly Supervised Color Transfer. IEEE Signal Process. Lett. 2018, 25, 323–327. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Li, N.; Zhang, S.; Yu, Z.; Zheng, H.; Zheng, B. Multi-scale adversarial network for underwater image restoration. Opt. Laser Technol. 2019, 110, 105–113. [Google Scholar] [CrossRef]
- Li, C.; Anwar, S.; Porikli, F. Underwater scene prior inspired deep underwater image and video enhancement. Pattern Recognit. 2020, 98, 107038. [Google Scholar] [CrossRef]
- Li, C.; Guo, C.; Ren, W.; Cong, R.; Hou, J.; Kwong, S.; Tao, D. An Underwater Image Enhancement Benchmark Dataset and Beyond. IEEE Trans. Image Process. 2019, 29, 4376–4389. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Hu, J.; Li, C.; Rohde, G.; Du, Y.; Hu, K. An In-Depth Survey of Underwater Image Enhancement and Restoration. IEEE Access 2019, 7, 123638–123657. [Google Scholar] [CrossRef]
- Kashif, I.; Salam, R.A.; Azam, O.; Talib, A.Z. Underwater Image Enhancement Using an Integrated Colour Model. Iaeng Int. J. Comput. Sci. 2007, 34, 239–244. [Google Scholar]
- Hummel, R. Image enhancement by histogram transformation. Comput. Graph. Image Process. 1977, 6, 184–195. [Google Scholar] [CrossRef]
- Pizer, S.M.; Amburn, E.P.; Austin, J.D.; Cromartie, R.; Geselowitz, A.; Greer, T.; ter Haar Romeny, B.; Zimmerman, J.B.; Zuiderveld, K. Adaptive histogram equalization and its variations. Comput. Vis. Graph. Image Process. 1987, 39, 355–368. [Google Scholar] [CrossRef]
- Zuiderveld, K. Contrast Limited Adaptive Histogram Equalization—ScienceDirect. Graph. Gems 1994, 8, 474–485. [Google Scholar]
- Akila, C.; Varatharajan, R. Color fidelity and visibility enhancement of underwater image de-hazing by enhanced fuzzy intensification operator. Multimed. Tools Appl. 2018, 77, 4309–4322. [Google Scholar] [CrossRef]
- Singh, K.; Kapoor, R.; Sinha, S.K. Enhancement of low exposure images via recursive histogram equalization algorithms. Optik 2015, 126, 2619–2625. [Google Scholar] [CrossRef]
- Jin, S.; Qu, P.; Zheng, Y.; Zhao, W.; Zhang, W. Color Correction and Local Contrast Enhancement for Underwater Image Enhancement. IEEE Access 2022, 10, 119193–119205. [Google Scholar] [CrossRef]
- Zhou, J.; Yao, J.; Zhang, W.; Zhang, D. Multi-scale retinex-based adaptive gray-scale transformation method for underwater image enhancement. Multimed. Tools Appl. 2022, 81, 1811–1831. [Google Scholar] [CrossRef]
- Abdul Ghani, A.S. Image contrast enhancement using an integration of recursive-overlapped contrast limited adaptive histogram specification and dual-image wavelet fusion for the high visibility of deep underwater image. Ocean Eng. 2018, 162, 224–238. [Google Scholar] [CrossRef]
- Lei, X.; Wang, H.; Shen, J.; Liu, H. Underwater image enhancement based on color correction and complementary dual image multi-scale fusion. Appl. Opt. 2022, 61, 5304. [Google Scholar] [CrossRef]
- Yang, W.; Jing, Z.; Yang, C.; Wang, Z. A deep CNN method for underwater image enhancement. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017. [Google Scholar]
- Naik, A.; Swarnakar, A.; Mittal, K. Shallow-UWnet: Compressed Model for Underwater Image Enhancement. arXiv 2021, arXiv:2101.02073. [Google Scholar]
- Guo, Y.; Li, H.; Zhuang, P. Underwater Image Enhancement Using a Multiscale Dense Generative Adversarial Network. IEEE J. Ocean Eng. 2019, 45, 862–870. [Google Scholar] [CrossRef]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Islam, J.; Xia, Y.; Sattar, J. Fast Underwater Image Enhancement for Improved Visual Perception. IEEE Robot. Autom. Lett. 2020, 5, 3227–3234. [Google Scholar] [CrossRef] [Green Version]
- Du, R.; Li, W.; Chen, S.; Li, C.; Zhang, Y. Unpaired Underwater Image Enhancement Based on CycleGAN. Information 2021, 13, 1. [Google Scholar] [CrossRef]
- Panetta, K.; Gao, C.; Agaian, S. Human-Visual-System-Inspired Underwater Image Quality Measures. IEEE J. Ocean. Eng. 2015, 41, 541–551. [Google Scholar] [CrossRef]
- Jiang, Y.; Gong, X.; Liu, D.; Cheng, Y.; Fang, C.; Shen, X.; Yang, J.; Zhou, P.; Wang, Z. EnlightenGAN: Deep Light Enhancement Without Paired Supervision. IEEE Trans. Image Process. 2021, 30, 2340–2349. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Chan, W.-H.; Chen, Y.-Q. Automatic white balance for digital still camera. IEEE Trans. Consum. Electron. 1995, 41, 460–466. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Without UIQM Loss | Without Noise Reduction Network | Without Local Discriminator | UMGAN |
|---|---|---|---|---|
| MSE | 532.58 (1.24%) | 678.45 (28.97%) | 561.63 (6.76%) | 526.05 |
| PSNR | 23.33 (0.94%) | 21.48 (9.64%) | 23.07 (2.08%) | 23.55 |
| SSIM | 0.8934 (0.68%) | 0.8214 (9.51%) | 0.8915 (0.90%) | 0.8995 |
| UCIQE | 0.4208 (4.66%) | 0.4372 (0.73%) | 0.4232 (4.06%) | 0.4404 |
| UIQM | 3.191 (9.40%) | 3.268 (6.82%) | 3.193 (9.33%) | 3.491 |
| Method | MSE | PSNR | SSIM | UCIQE | UIQM |
|---|---|---|---|---|---|
| UCM | 725.47 | 21.82 | 0.8863 | 0.4114 | 3.0164 |
| CLAHE | 1924.31 | 15.67 | 0.5573 | 0.4528 | 2.9699 |
| White balance | 8238.24 | 10.61 | 0.4266 | 0.3089 | 2.3813 |
| Retinex | 2873.83 | 14.18 | 0.6353 | 0.4417 | 3.1860 |
| Image fusion | 1884.54 | 16.75 | 0.7336 | 0.4202 | 3.3534 |
| UWCNN | 1959.92 | 16.22 | 0.8095 | 0.3498 | 3.1654 |
| CycleGAN | 1150.65 | 19.05 | 0.7431 | 0.4587 | 3.3417 |
| FUnIE-GAN | 952.22 | 19.15 | 0.7481 | 0.4224 | 3.4052 |
| Shadow-UWnet | 740.95 | 20.15 | 0.8460 | 0.3758 | 3.0890 |
| Ours | 526.05 | 23.55 | 0.8995 | 0.4404 | 3.4911 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, B.; Mei, Y.; Yan, N.; Chen, Y. UMGAN: Underwater Image Enhancement Network for Unpaired Image-to-Image Translation. J. Mar. Sci. Eng. 2023, 11, 447. https://doi.org/10.3390/jmse11020447
Sun B, Mei Y, Yan N, Chen Y. UMGAN: Underwater Image Enhancement Network for Unpaired Image-to-Image Translation. Journal of Marine Science and Engineering. 2023; 11(2):447. https://doi.org/10.3390/jmse11020447
Chicago/Turabian StyleSun, Boyang, Yupeng Mei, Ni Yan, and Yingyi Chen. 2023. "UMGAN: Underwater Image Enhancement Network for Unpaired Image-to-Image Translation" Journal of Marine Science and Engineering 11, no. 2: 447. https://doi.org/10.3390/jmse11020447
APA StyleSun, B., Mei, Y., Yan, N., & Chen, Y. (2023). UMGAN: Underwater Image Enhancement Network for Unpaired Image-to-Image Translation. Journal of Marine Science and Engineering, 11(2), 447. https://doi.org/10.3390/jmse11020447