
Mechanism of Phase-Locked Ice Crushing against Offshore Structures


Abstract
:1. Introduction
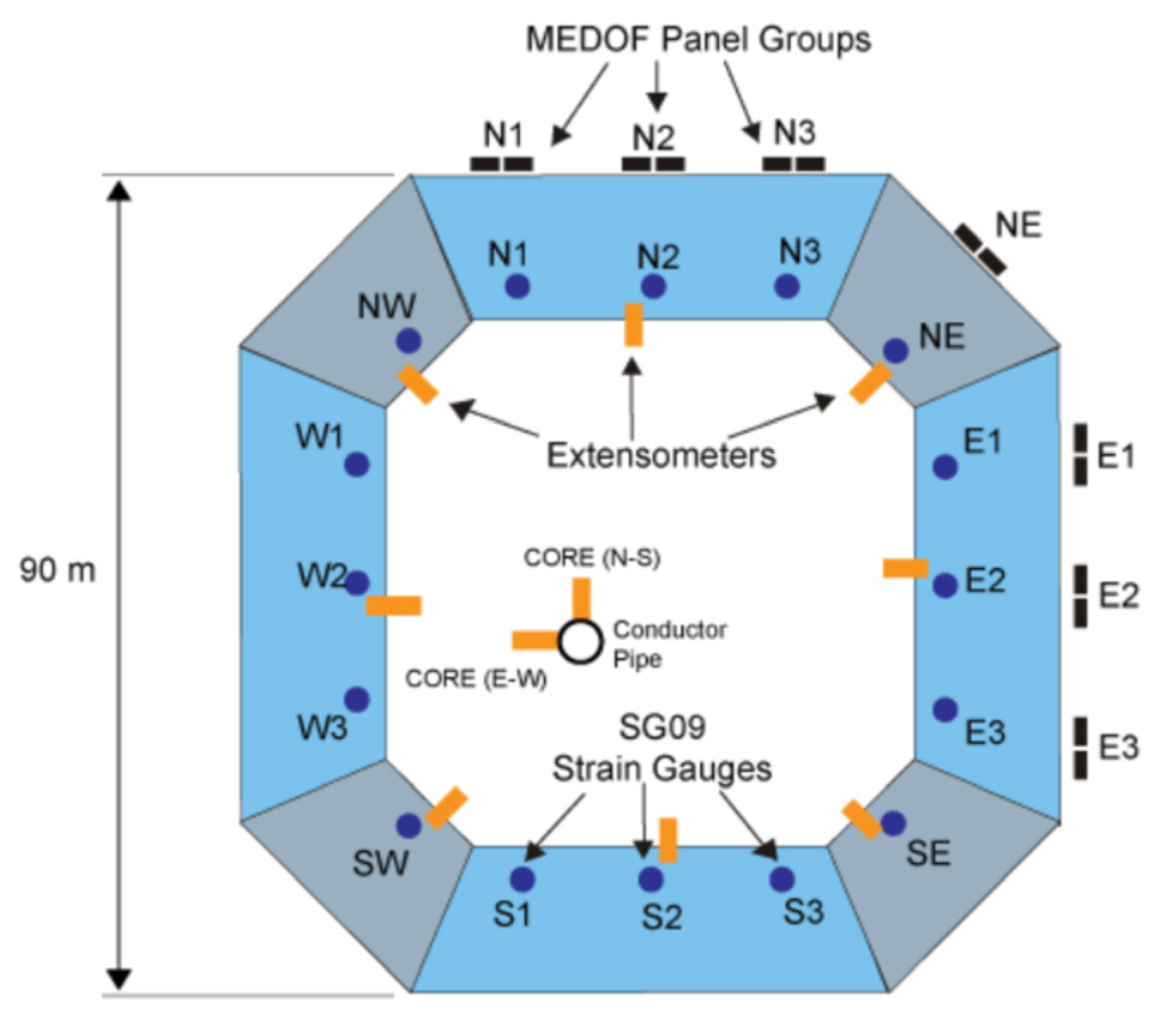
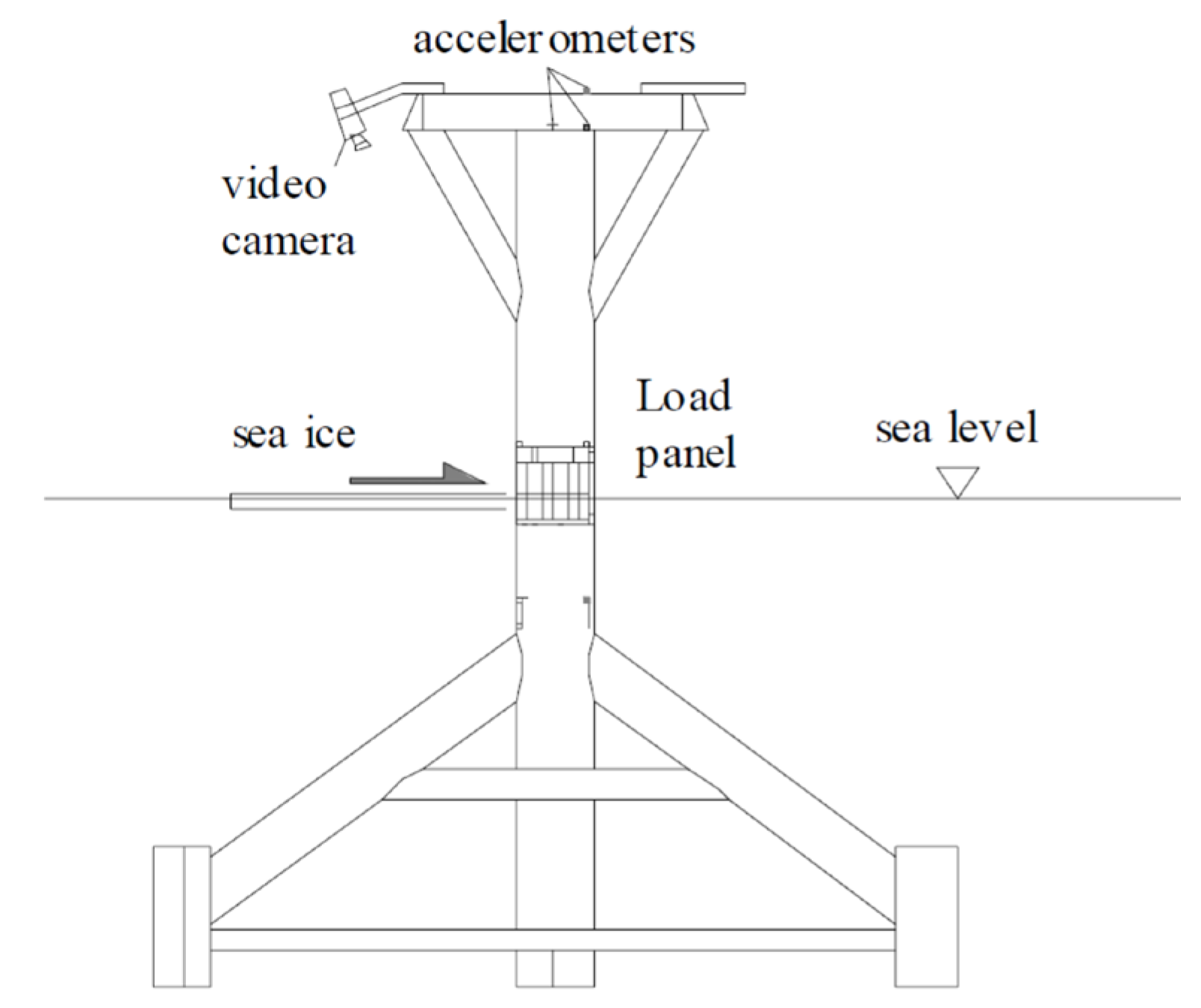
2. PLC Measured on Offshore Structures
- The ice–structure interaction process does not affect ice motion. The structure’s response is coupled with ice failure and extrusion.
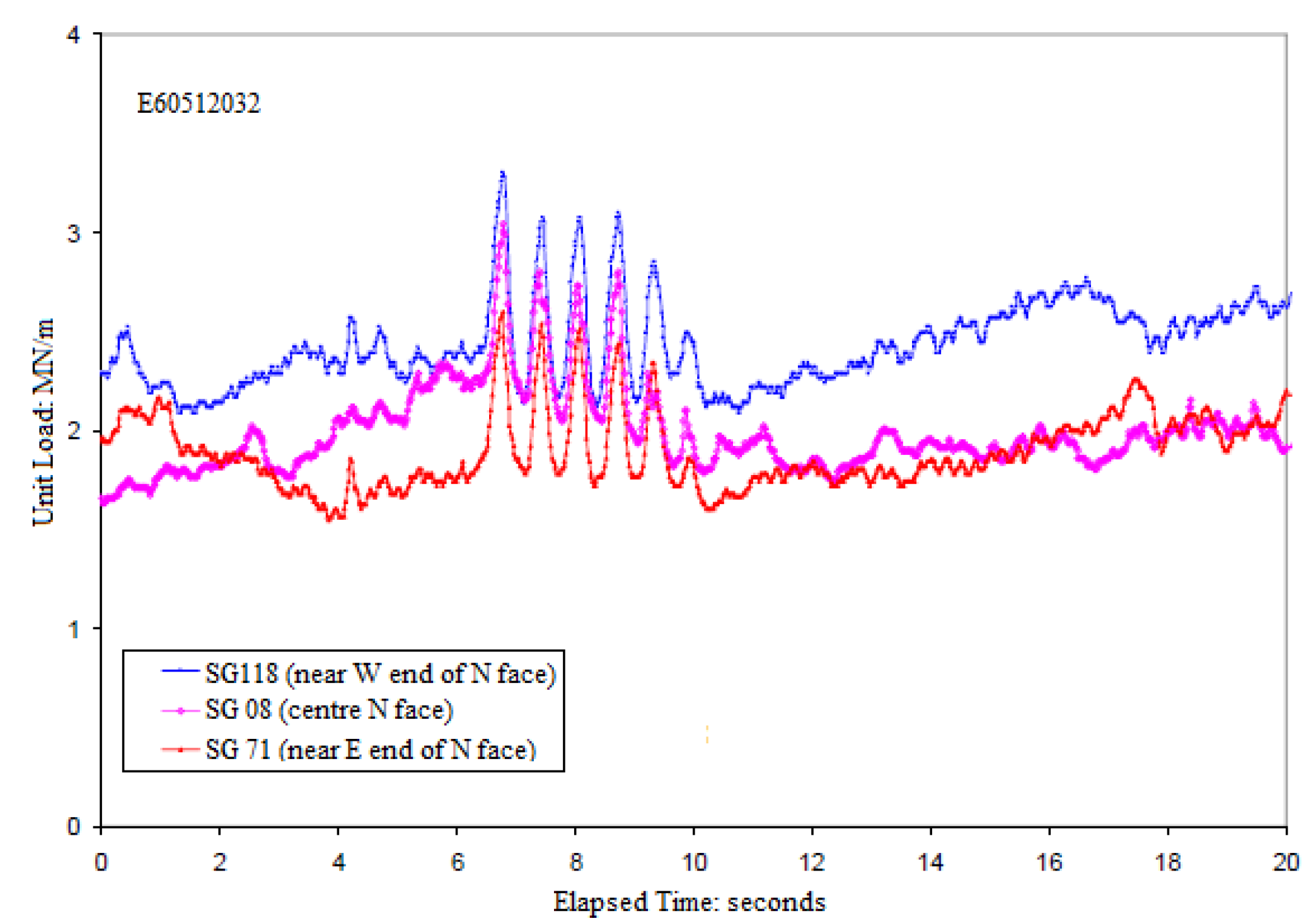
- Ice crushing occurs simultaneously across the contact surface and the ice sheet is crushed into powder.
- The structure’s response is a steady vibration rather than a stochastic process.
- The platform’s response appears to be partially uncoupled from the ice loading function.
3. Ice Structure Interaction during PLC
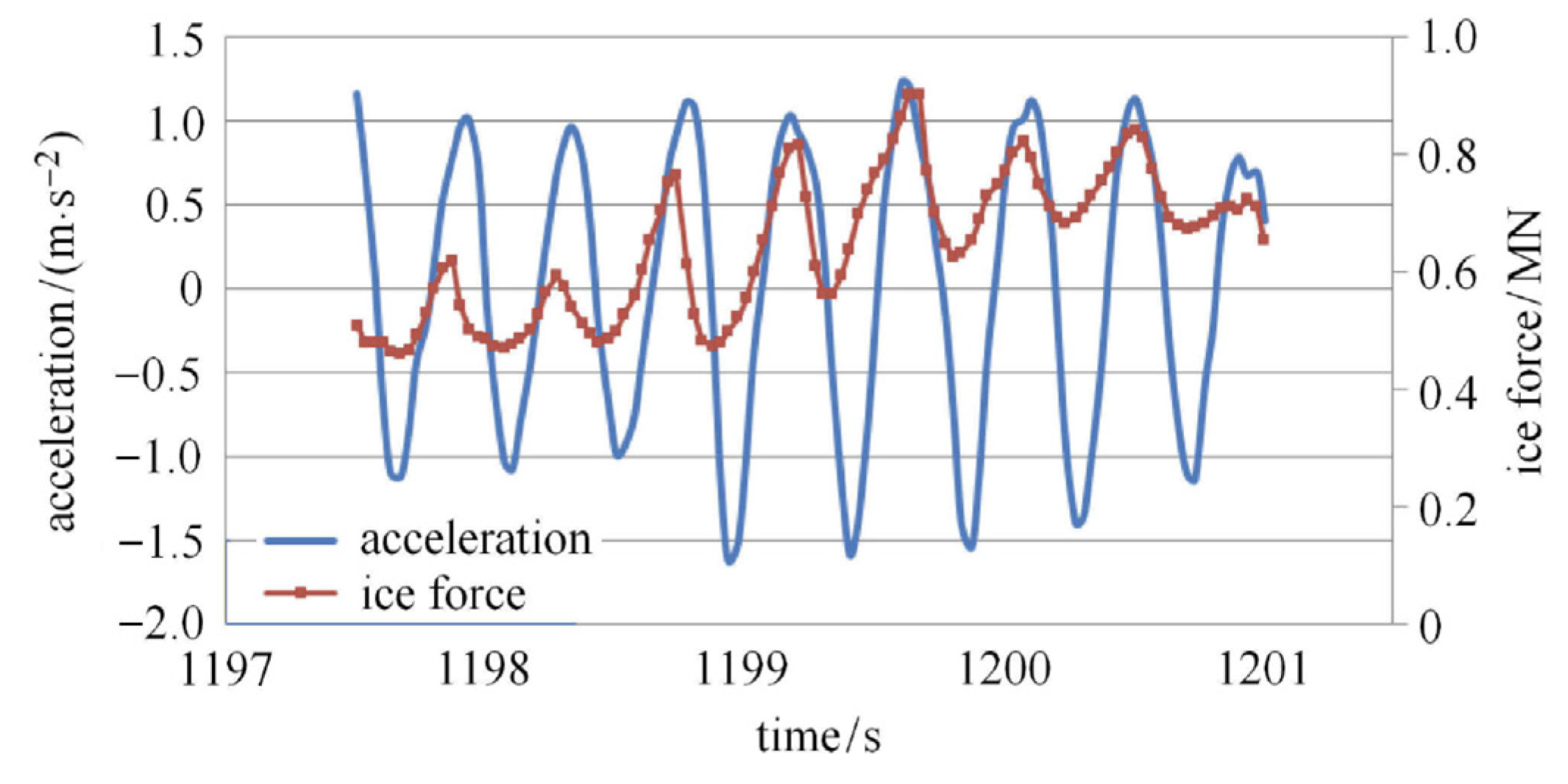
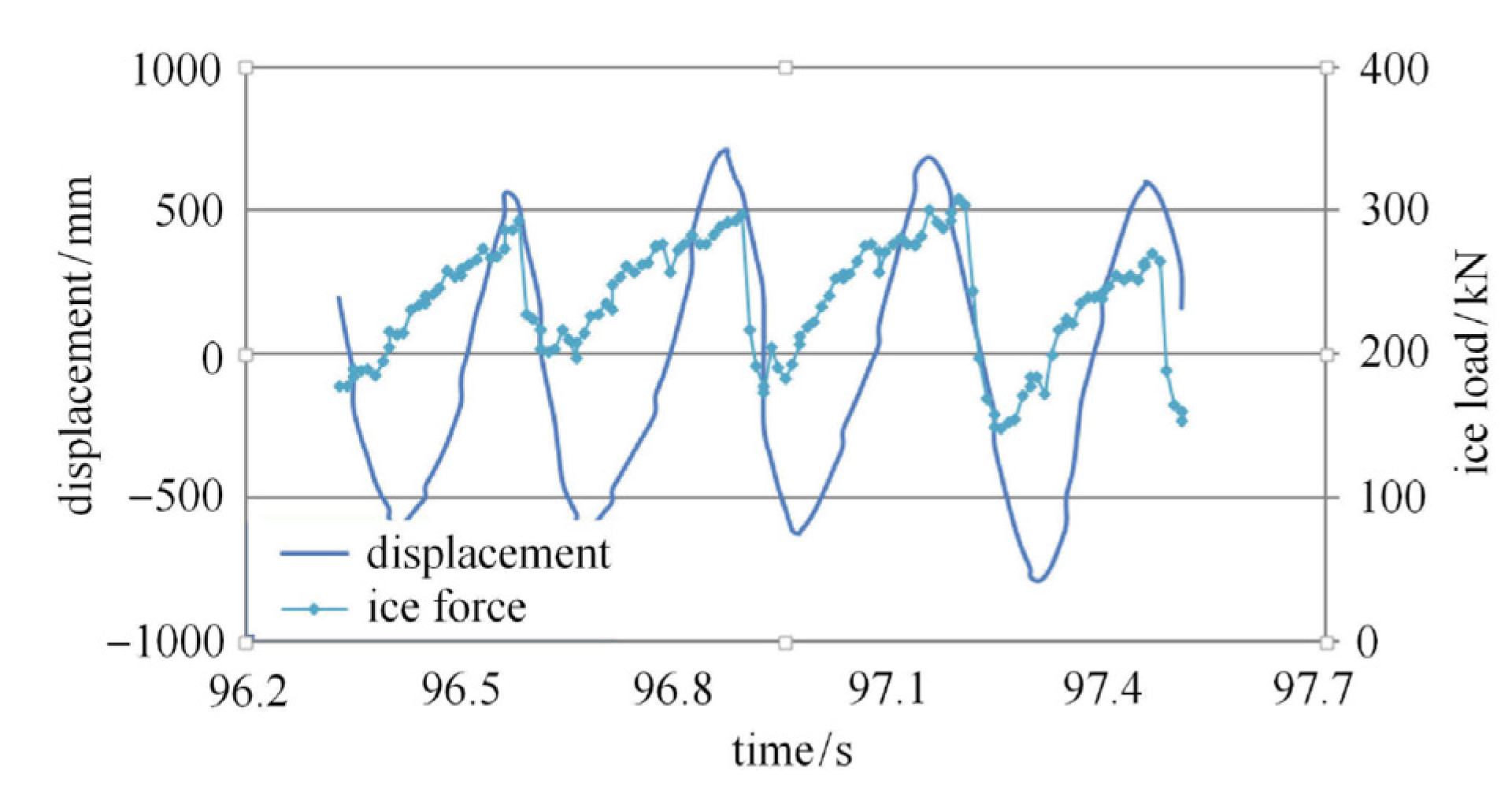
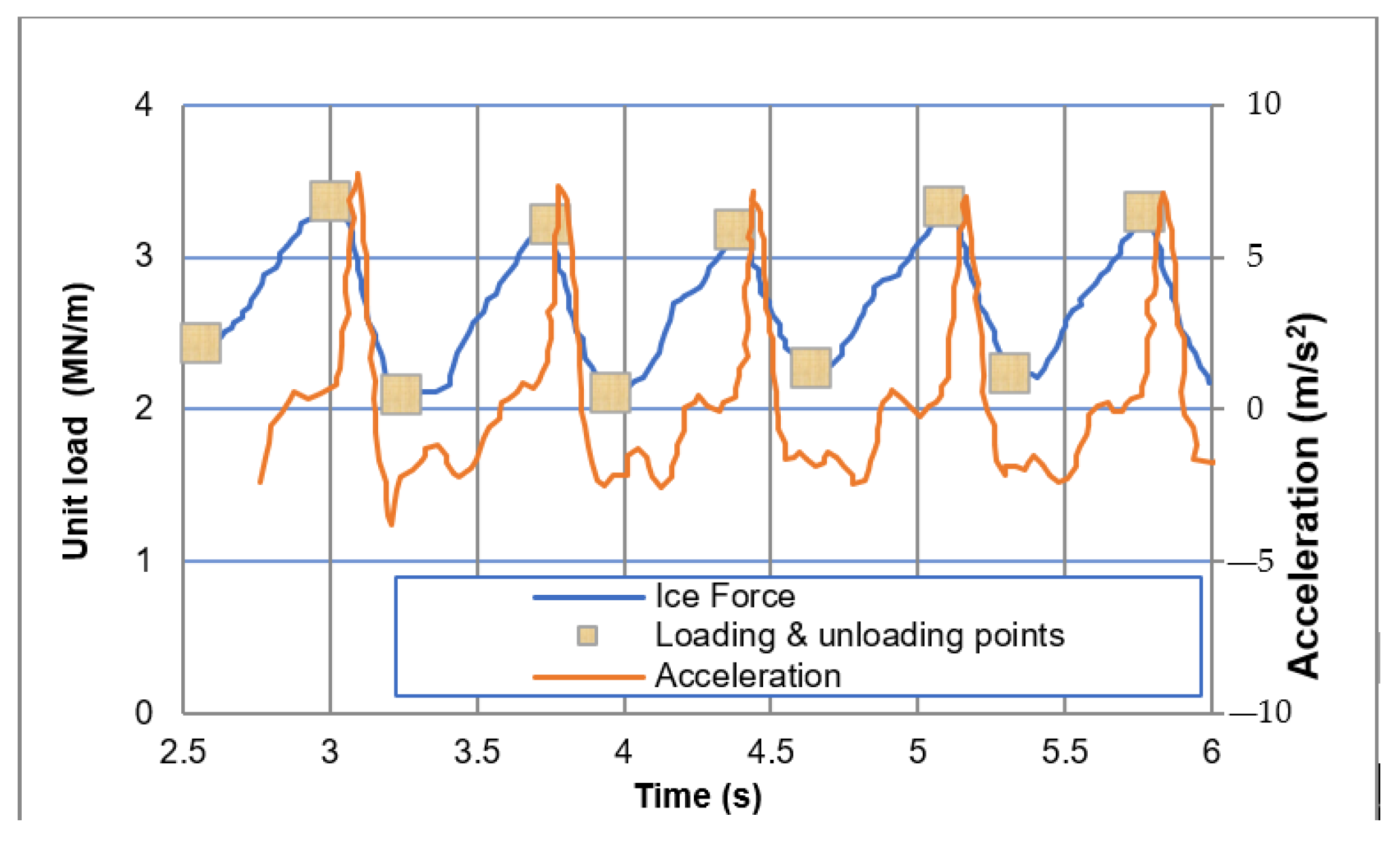
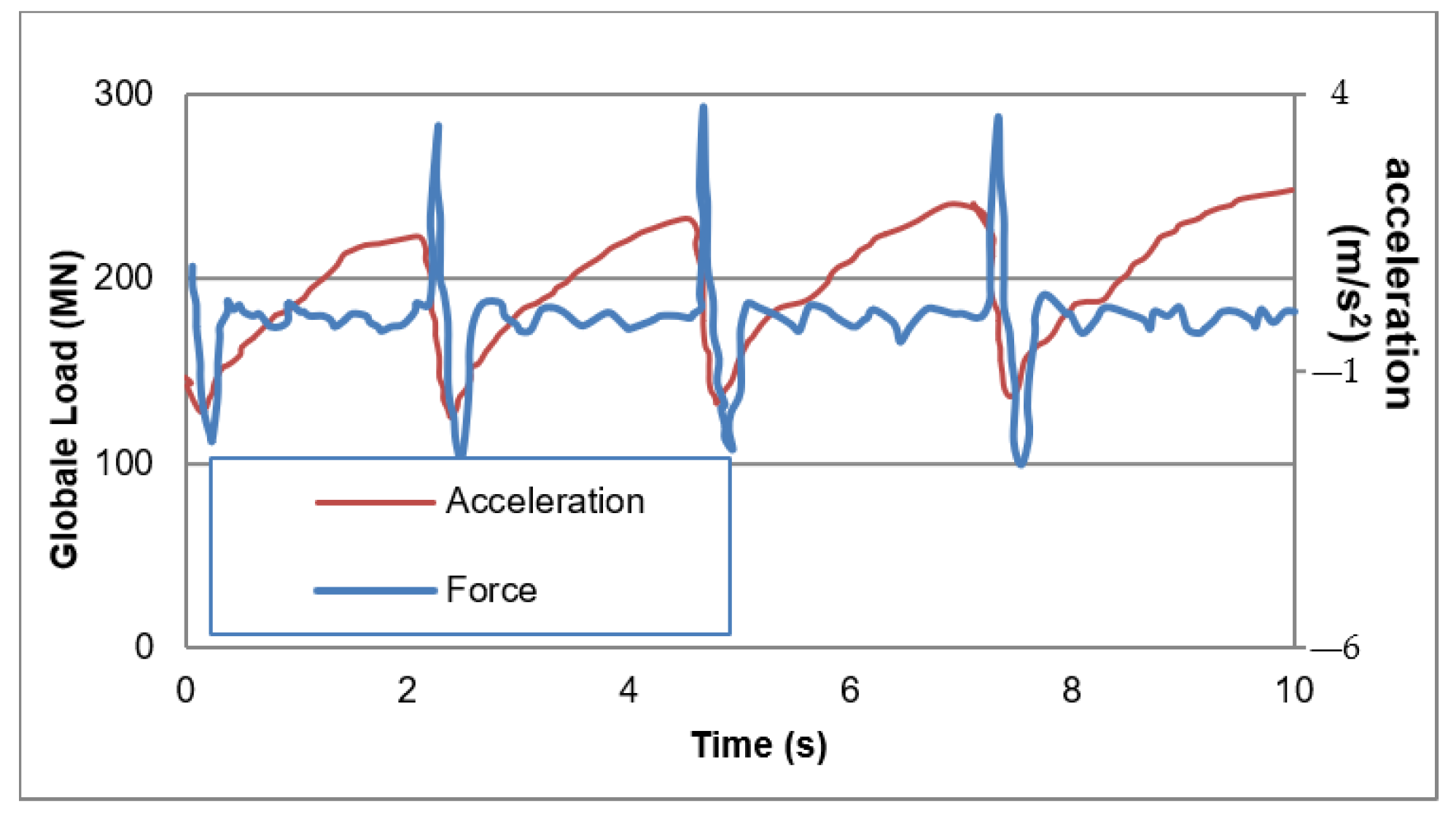
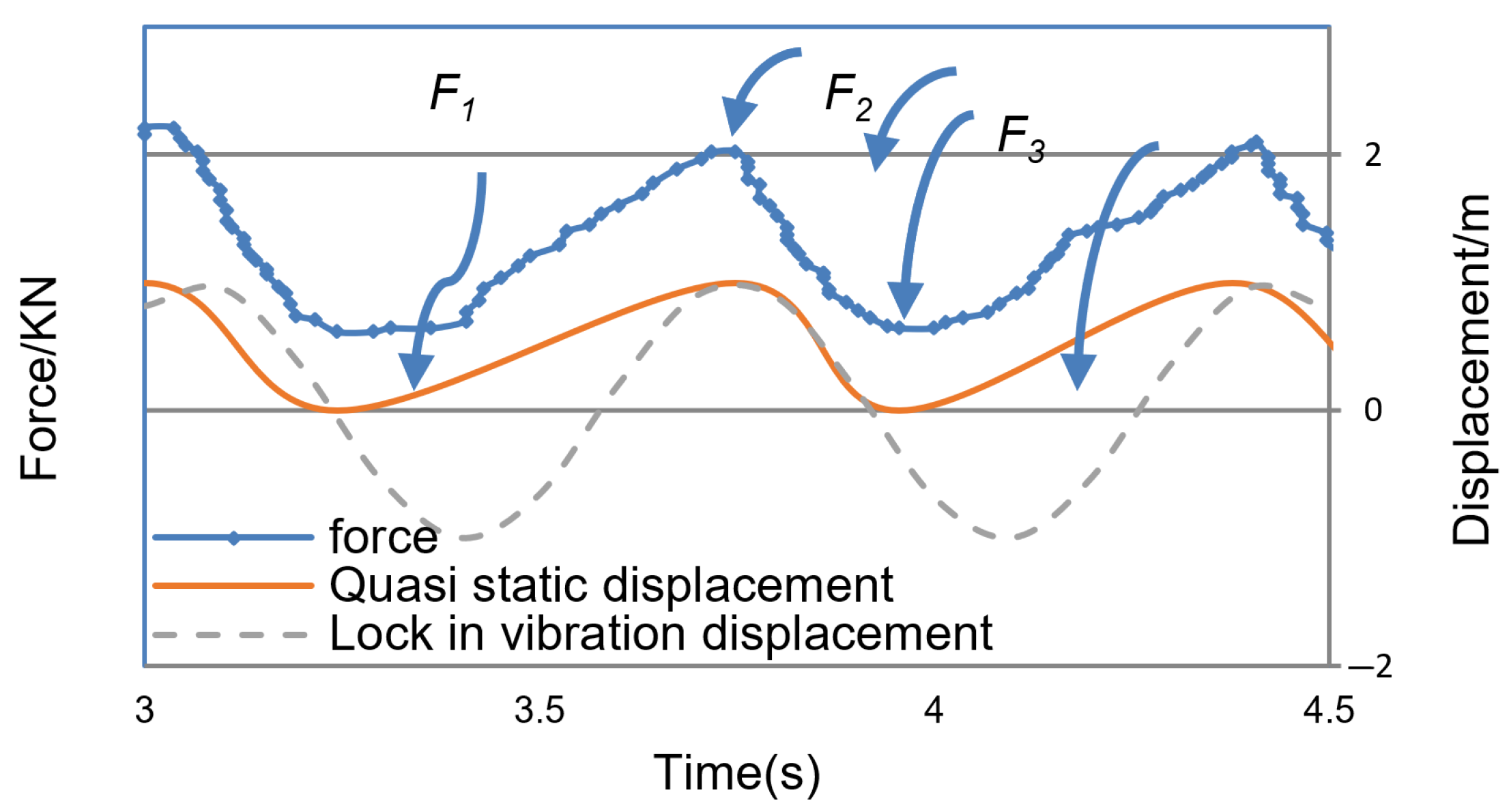
- The ice crushing is an intermittent process rather than a continuous one. It consists of two phases: damage and collapse.
- In the damage phase, the ice does not break and the ice forces increase. In the collapse phase, the ice collapses and the ice forces decrease. The damage phase corresponds to the loading phase, and the collapse phase corresponds to the unloading phase.
- The collapsed ice extrudes out of the ice–structure interface in each collapse phase. The next process begins with intact ice acting on the structure again.
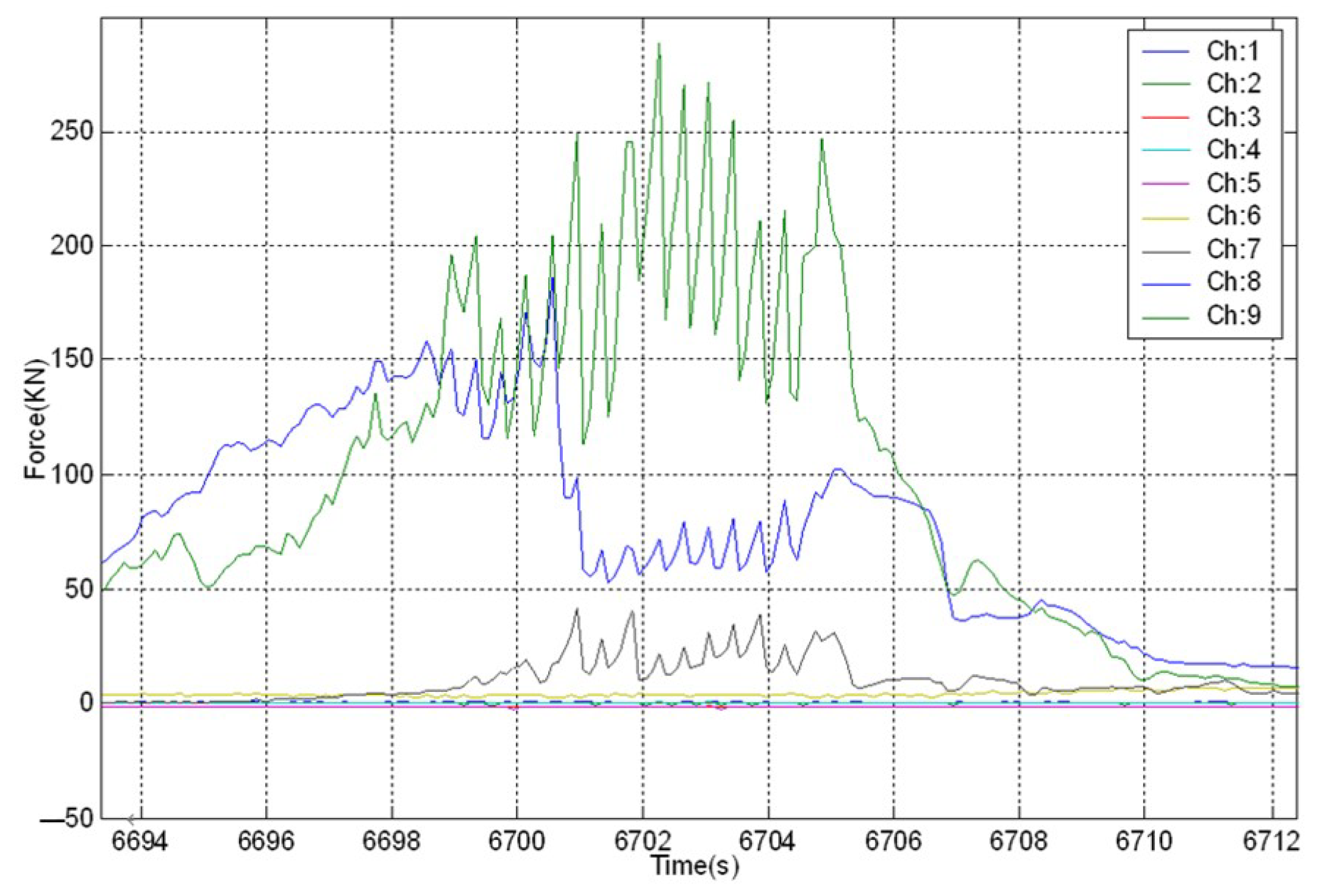
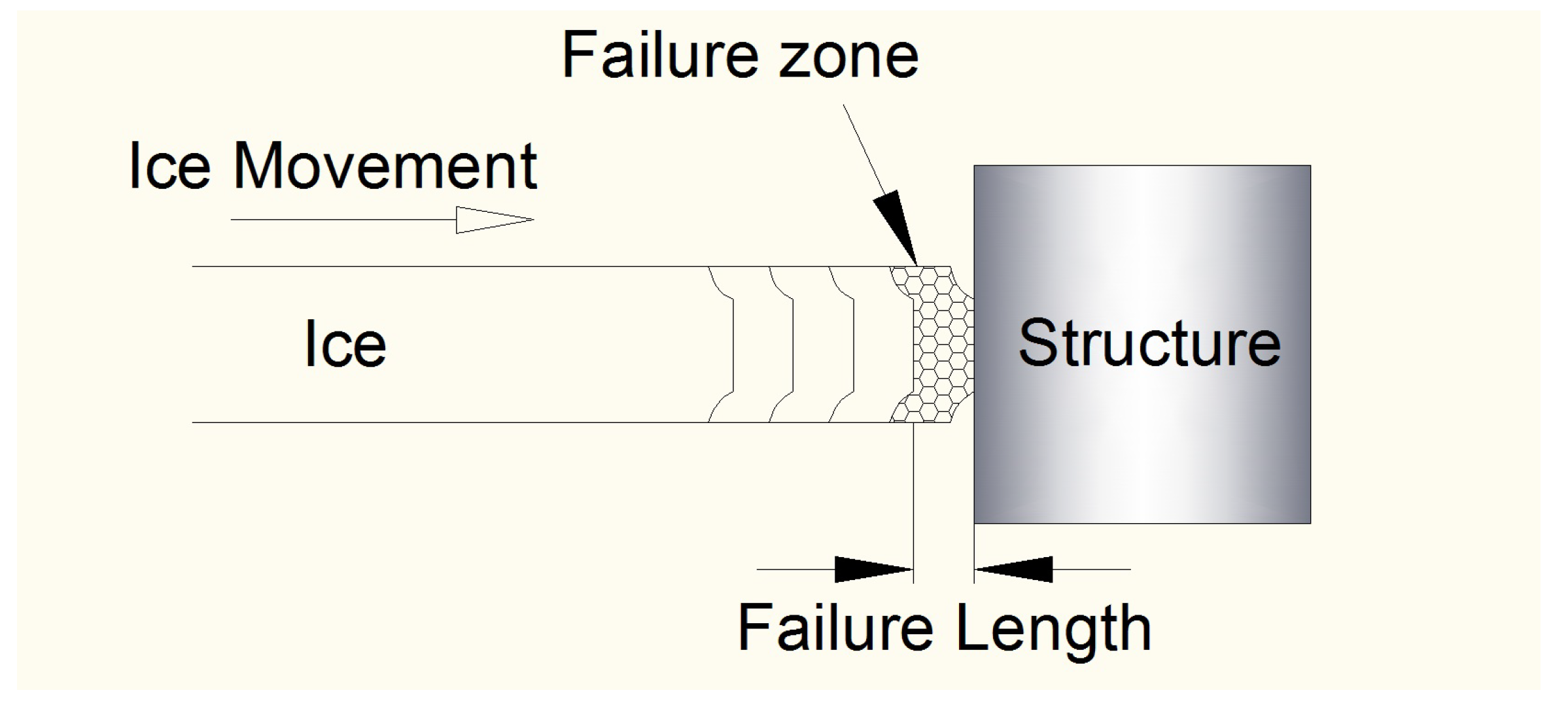
- The DDC failure occurs once in each cycle of vibration. Ice in a failure zone is pulverized into powder in each failure.
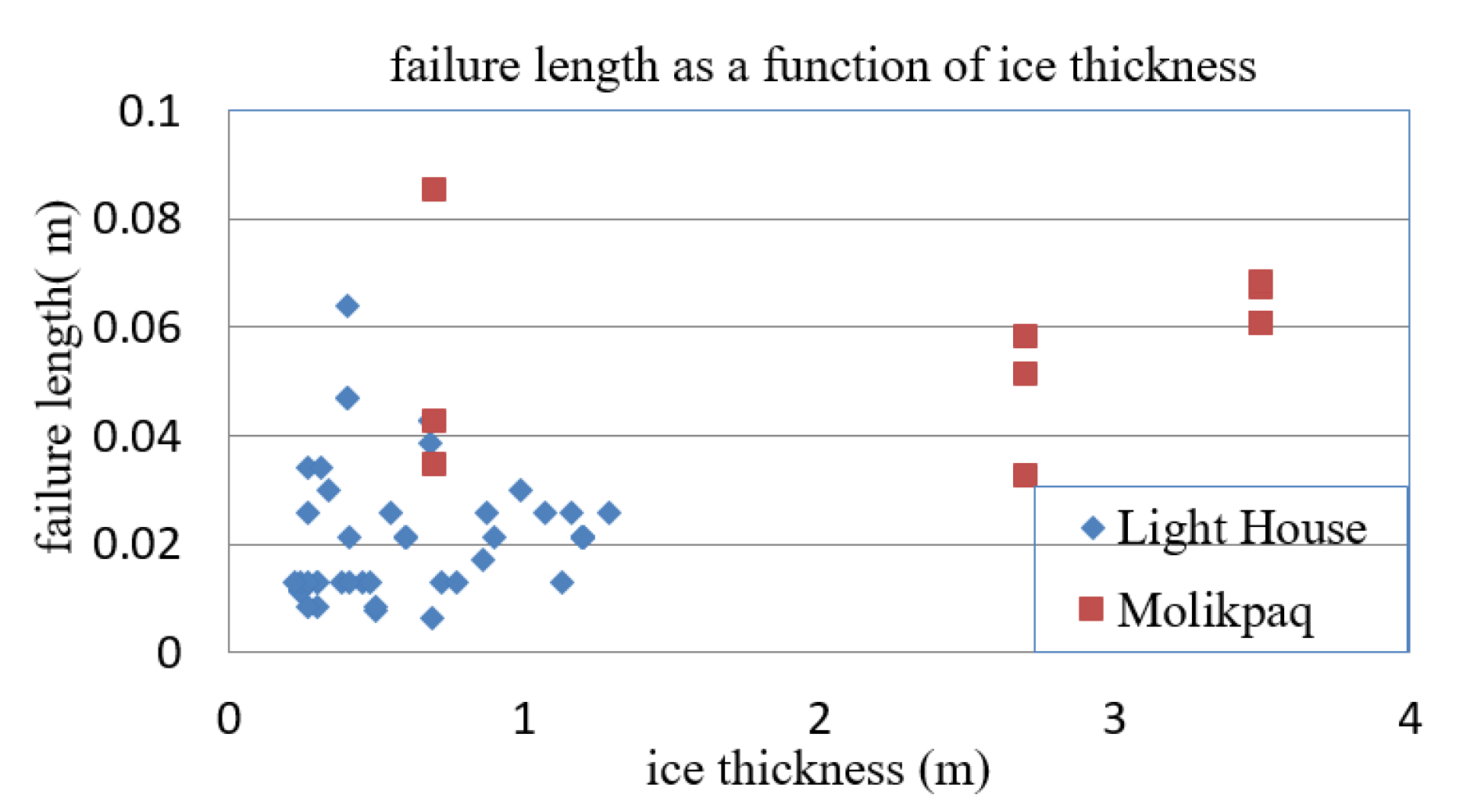
- The ice has a specific failure length, which is the depth of the failure zone in each failure cycle.
4. Occurence of The PLC Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Basack, S.; Goswami, G.; Khabbaz, H.; Karakouzian, M. Flow Characteristics through Granular Soil Influenced by Saline Water Intrusion: A Laboratory Investigation. Civ. Eng. J. 2022, 8, 863–878. [Google Scholar] [CrossRef]
- Blenkarn, K. Measurement and analysis of ice forces on Cook Inlet structures. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 21–23 April 1970. [Google Scholar]
- Engelbrektson, A.; Janson, J.E. Field observations of ice action on concrete structures in the Baltic Sea. Concr. Int. 1985, 7, 48–52. [Google Scholar]
- Kärnä, T. Steady-state vibrations of offshore structures. Hydrotech. Constr. 1994, 28, 446–453. [Google Scholar] [CrossRef]
- Määttänen, M. On Conditions for the Rise of Self-Excited Ice-Induced Autonomous Oscillations in Slender Marine Pile Structures; Winter Navigation Research Board: Helsinki, Finland, 1978. [Google Scholar]
- Määttänen, M.; Reddy, D.; Arockiasamy, M.; Cheema, P.S. Ice-Structure Interaction Studied on a Lighthouse in the Gulf of Bothnia Using Response Spectrum and Power Spectral Density Function Analyses. In Proceedings of the 4th International Conference Port Ocean Engineering Arctic Engineering, St. John’s, NL, Canada, 26–30 September 1977; pp. 321–334. [Google Scholar]
- Peyton, H. Sea Ice strength, University of Alaska, Geophysical Institute. Final Report for the Navy Office of Naval Research. Contract 1966, 1. [Google Scholar]
- Yue, Q.; Bi, X.; Sun, B.; Zhang, T.; Chen, X. Full scale force measurement on JZ20-2 platform. In Proceedings of the Proc. IAHR Ice Symp.(IAHR’96), Beijing, China, 27–30 August 1996; 1996; pp. 282–289. [Google Scholar]
- Jefferies, M.A. Dynamic response of “Molikpaq” to ice-structure interaction. In Proceedings of the 7th OMAE, Houston, TX, USA, 7–12 February 1988; Volume 4, pp. 201–220. [Google Scholar]
- Jordaan, I.J.; Timco, G.W. Dynamics of the ice-crushing process. J. Glaciol. 1988, 34, 318–326. [Google Scholar] [CrossRef]
- Huang, G.; Liu, P. A dynamic model for ice-induced vibration of structures. J. Offshore Mech. Arct. Eng. 2009, 131, 011501. [Google Scholar] [CrossRef]
- Matlock, H.; Dawkins, W.P.; Panak, J.J. A modal for the prediction of ice-structure internation. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 17–20 May 1969; p. OTC-1066-MS. [Google Scholar]
- Bentley, D.L.; Dempsey, J.P.; Sodhi, D.S.; Wei, Y. Fracture of S2 columnar freshwater ice: Floating double cantilever beam tests. In Proceedings of the Ninth IAHR Ice Symposium, Sapporo, Japan, 23–27 August 1988. [Google Scholar]
- Yue, Q.; Bi, X. Ice-induced jacket structure vibrations in Bohai Sea. J. Cold Reg. Eng. 2000, 14, 81–92. [Google Scholar] [CrossRef]
- Yue, Q.; Guo, F.; Kärnä, T. Dynamic ice forces of slender vertical structures due to ice crushing. Cold Reg. Sci. Technol. 2009, 56, 77–83. [Google Scholar] [CrossRef]
- Gagnon, R. An explanation for the Molikpaq May 12, 1986 event. Cold Reg. Sci. Technol. 2012, 82, 75–93. [Google Scholar] [CrossRef]
- Yan, Q. A new method for the analysis of ice intermittent crushing induced lock-in vibration. In Proceedings of the The Twenty-third International Offshore and Polar Engineering Conference, Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Timco, G.; Johnston, M. Ice loads on the Molikpaq in the Canadian Beaufort Sea. Cold Reg. Sci. Technol. 2003, 37, 51–68. [Google Scholar] [CrossRef]
- Jefferies, M.; Rogers, B.; Hardy, M.; Wright, B. Ice load measurement on Molikpaq: Methodology and accuracy. In Proceedings of the International Conference on Port and Ocean Engineering under Arctic Conditions, Montreal, QC, Canada, 10–14 July 2011. [Google Scholar]
- Nord, T.S.; Samardžija, I.; Hendrikse, H.; Bjerkås, M.; Høyland, K.V.; Li, H. Ice-induced vibrations of the Norströmsgrund lighthouse. Cold Reg. Sci. Technol. 2018, 155, 237–251. [Google Scholar] [CrossRef]
- Ji, S.-Y.; Yue, Q.-J.; Bi, X.-J. Probability distribution of sea ice fatigue parameters in JZ 20-2 sea area of Liaodong Bay. Ocean Eng. 2002, 20, 39–43. [Google Scholar]
- Guojun, W.; Dayong, Z.; Chunjuan, L. Vibration analysis of offshore wind turbine foundation in ice zone. Hip Ocean Eng. 2016, 45, 109–113. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structures | Molikpaq | Jacket Structures | Lighthouse |
|---|---|---|---|
| Ice thickness (m) | 1–3 | 0.1–0.30 | 0.26–1.9 |
| Structure Diameter (m) | 90 | 1.5 | 7.5 |
| Load panel spacing (m) | 17 and 19 | 0.275 | 1.2 |
| Load panel width Height (m) | 1.135 × 2.715 | 0.27 × 0.6 | 1.2 × 1.6 |
| Natural Frequency (Hz) | - | 2.1–2.3 | 2.3–2.7 |
| PLC duration (s) | Few seconds | 100 | More than 900 |
| Ice velocity (m/s) | 0–0.06, 0.2 | 0.023–0.075 | <0.04 |
| Ice | Relative Velocity | Compliant Structure | Rigid Structure | ||||
|---|---|---|---|---|---|---|---|
| Ice Force | Ice Failure | Position | Velocity | Position | Acceleration | ||
| F1 | Loading start | Intact ice starts to act on the structure, Micro cracks initiate in the ice sheet. | Vice + VSmax | Close to the equilibrium position, move towards −x direction. | Velocity close to −VSmax. | Almost x = 0. | Acceleration can be negative due to the last unloading. |
| F1 To F2 | Loading phase, ice force increase | Ice continuously acting on the structure. Cracks propagate in the ice, but the ice does not break. | Change from Vice + VSmax to Vice, to Vice − VSmax | Move from equilibrium position X0 to −Xmax, return to X0, then to Xmax. | Change from −VSmax to 0, then increase to VSmax and decrease to 0 again. | Move from X0 to Xmax. | small |
| F2 | Loading complete, unload start. | Cracks saturated in the ice. Ice starts to collapse. | Vice | Close to Xmax position. | V = 0 | Close to Xmax position. | small |
| F2 to F3 | Unloading process, ice force drops down. | Ice collapse. Ice spalls extrude out from contact surface between ice and structure. | Change from 0 to Vice + VSmax | Move from Xmax position to equilibrium position X0 in about 1/4 of the vibration period. | Velocity change from 0 to −VSmax. | Move from Xmax position to equilibrium position X0 very quickly. | A large acceleration due to the unloading. |
| F3 | Unloading finish. Next cycle start. | Ice extrusion ends, intact ice acts on the structure again. | Vice + VSmax | Structure returns to the equilibrium position. | Velocity close to −VSmax. | Structure returns to the equilibrium position. | Acceleration can be negative due to the inertia of structure. |
| Monitoring Times | Sea Area | σ |
|---|---|---|
| 2009–2016 | JZ20-2 | 15 |
| 2009–2016 | JZ9-3 | 19 |
| Monitoring Times | Sea Area | Probability |
|---|---|---|
| 2009–2016 | JZ20-2 | 0.05% |
| 2009–2016 | JZ9-3 | 0.03% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Gao, S.; Qu, Y.; Yin, H.; Chuang, Z. Mechanism of Phase-Locked Ice Crushing against Offshore Structures. J. Mar. Sci. Eng. 2023, 11, 868. https://doi.org/10.3390/jmse11040868
Wang B, Gao S, Qu Y, Yin H, Chuang Z. Mechanism of Phase-Locked Ice Crushing against Offshore Structures. Journal of Marine Science and Engineering. 2023; 11(4):868. https://doi.org/10.3390/jmse11040868
Chicago/Turabian StyleWang, Bin, Shan Gao, Yan Qu, Haoyang Yin, and Zhenju Chuang. 2023. "Mechanism of Phase-Locked Ice Crushing against Offshore Structures" Journal of Marine Science and Engineering 11, no. 4: 868. https://doi.org/10.3390/jmse11040868
APA StyleWang, B., Gao, S., Qu, Y., Yin, H., & Chuang, Z. (2023). Mechanism of Phase-Locked Ice Crushing against Offshore Structures. Journal of Marine Science and Engineering, 11(4), 868. https://doi.org/10.3390/jmse11040868