



Investigating the Reliability of the Location Transmitted by V-Pass Terminals: Prompt Rescue of Fishing Vessels


Abstract
:1. Introduction
2. Methods
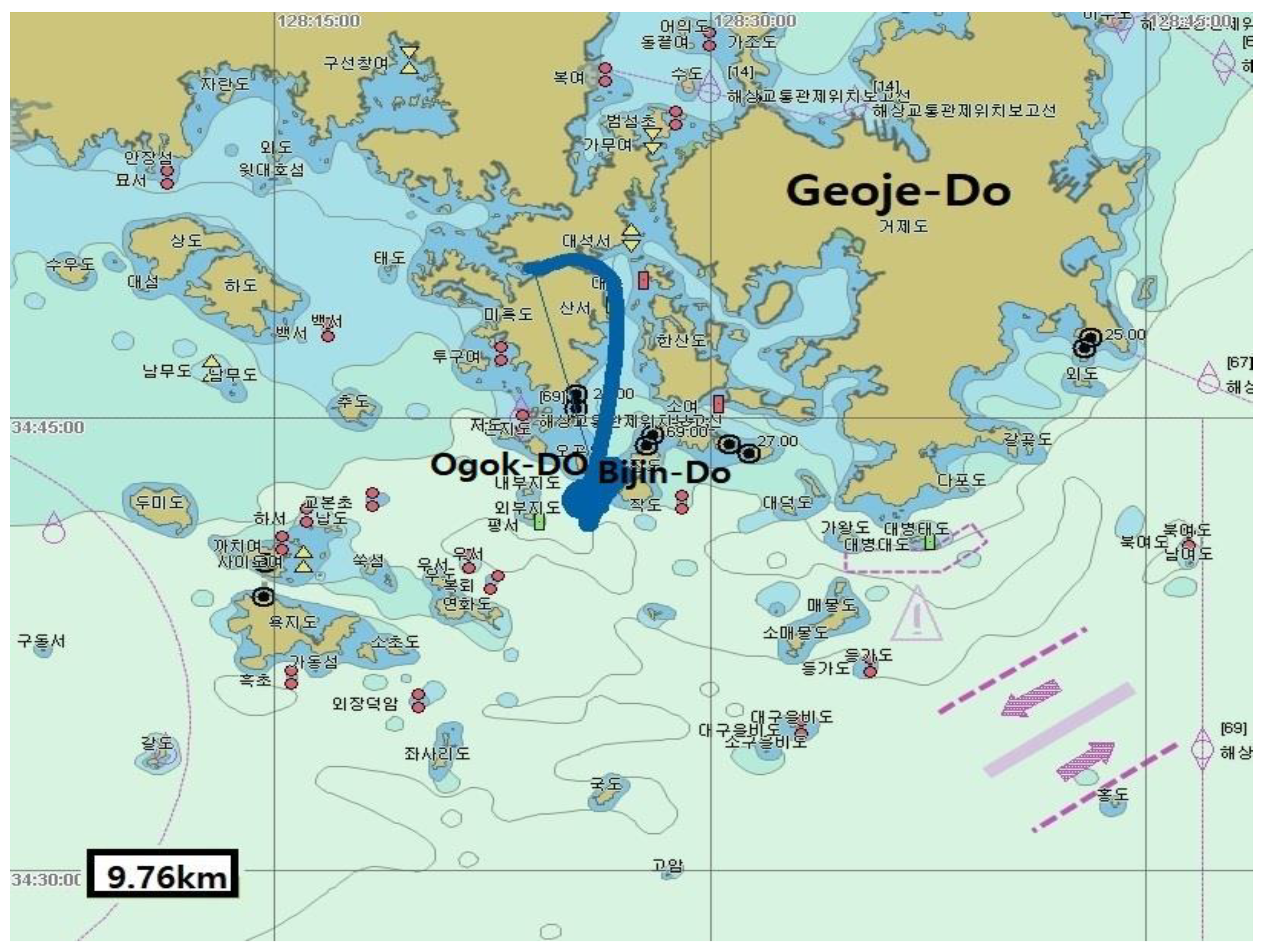
Test Details and Procedure
3. Results
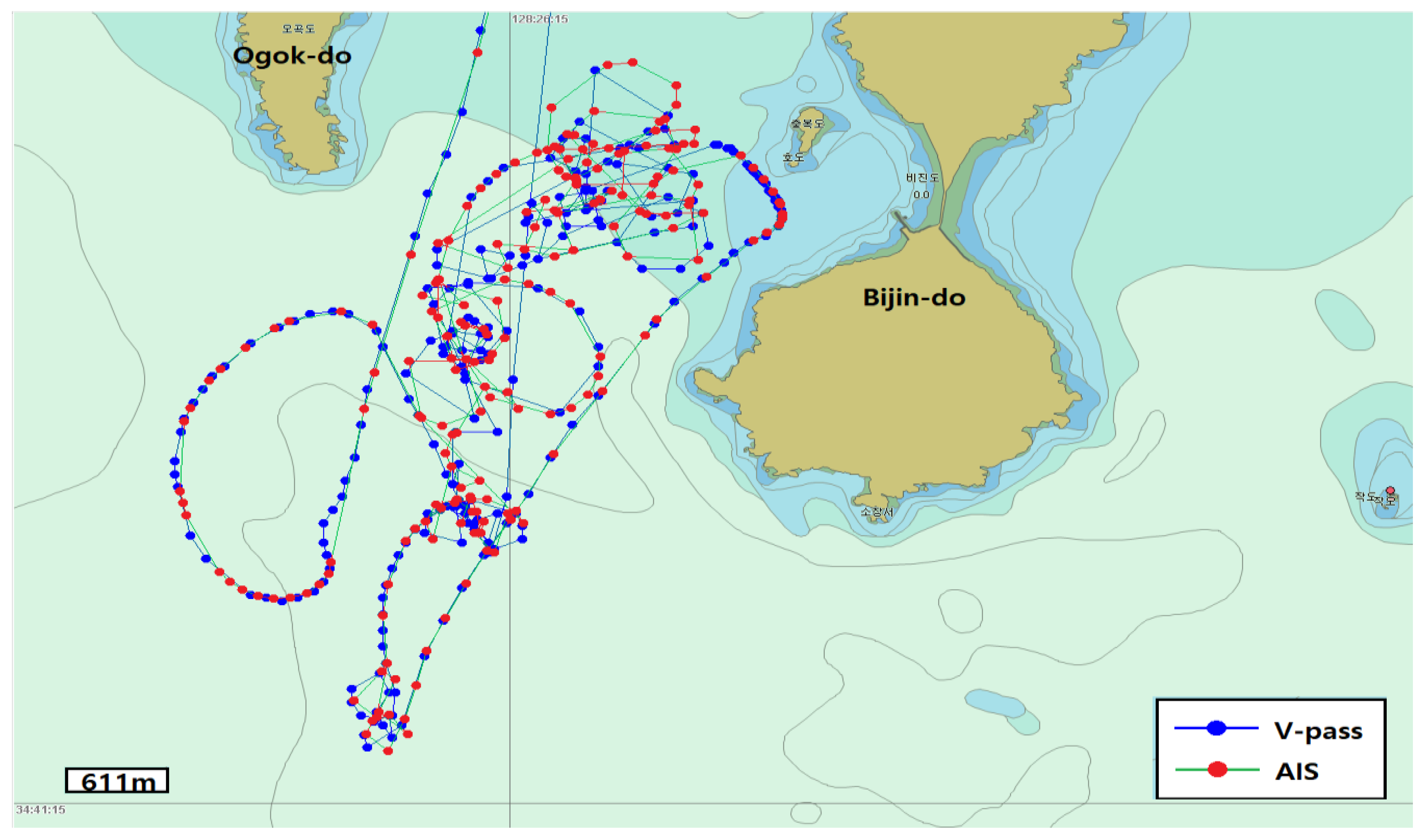
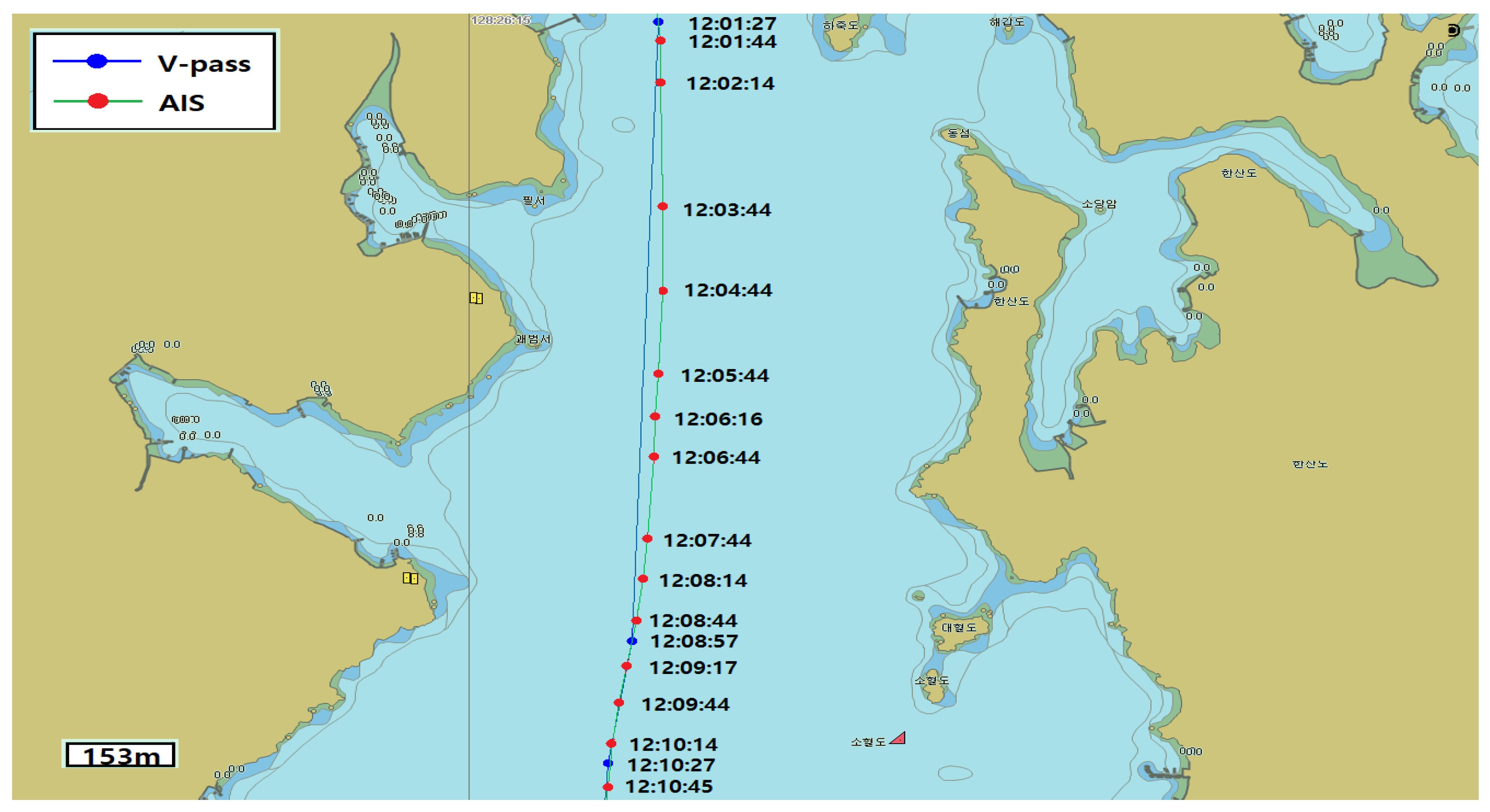
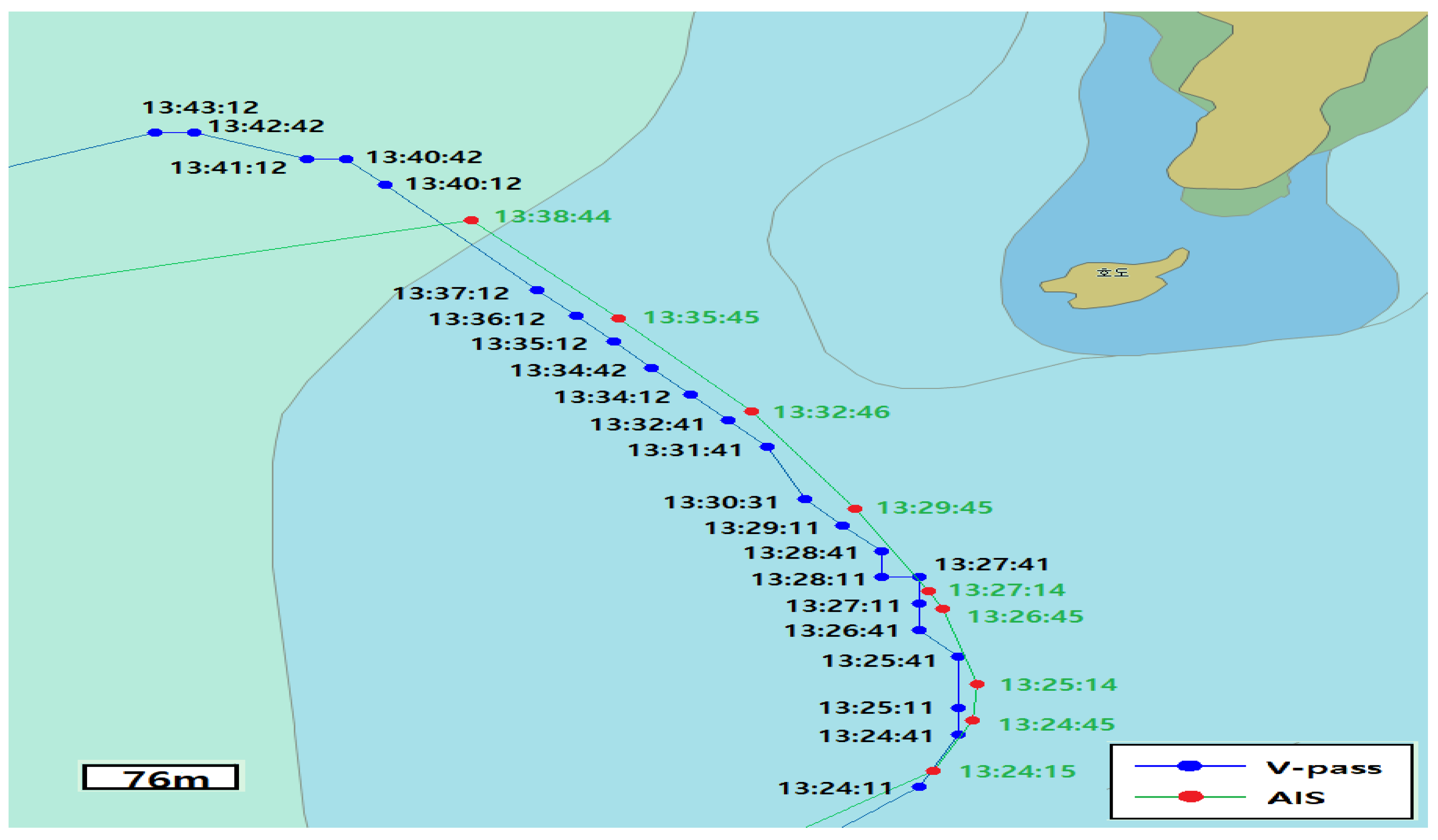
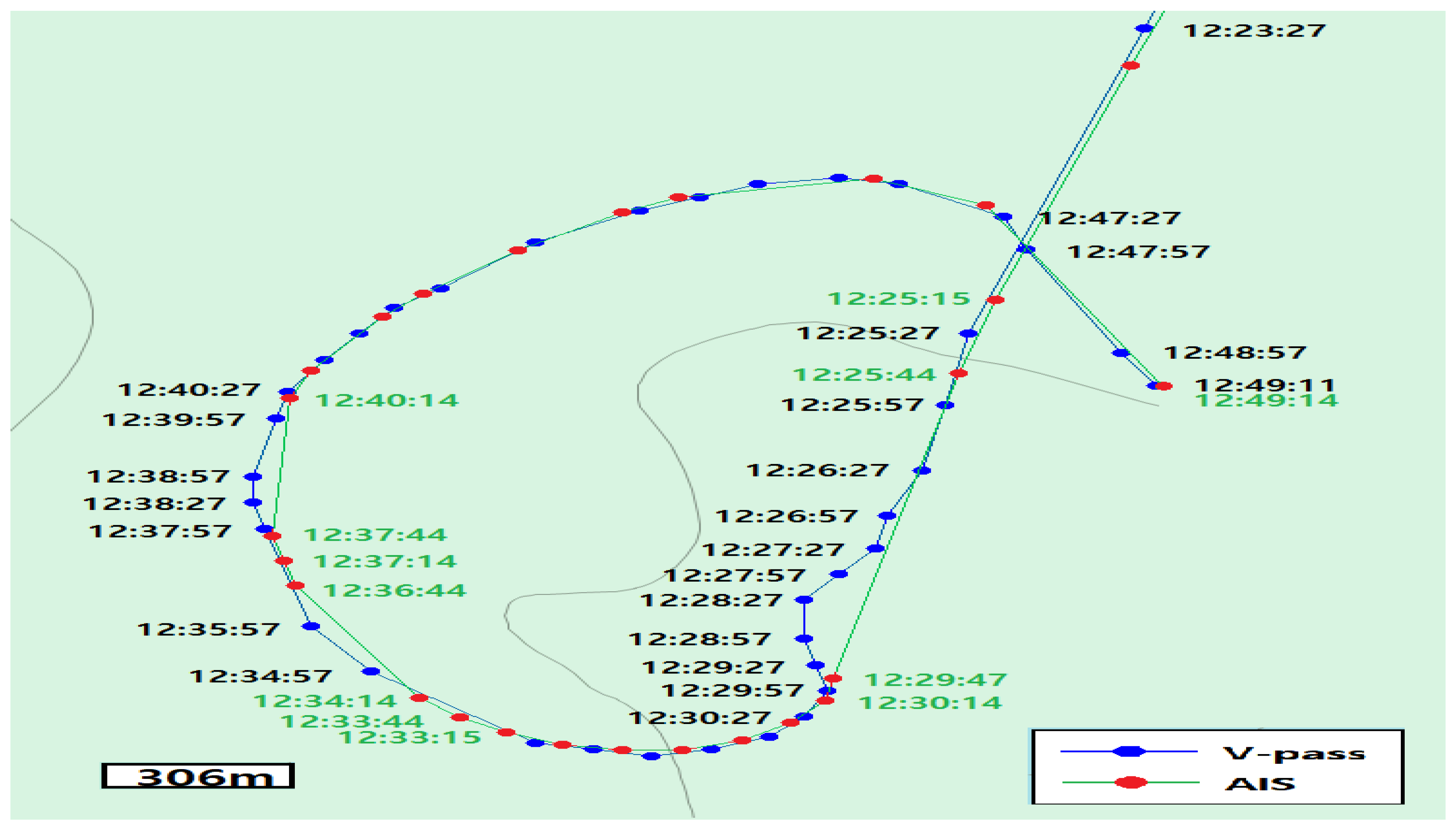
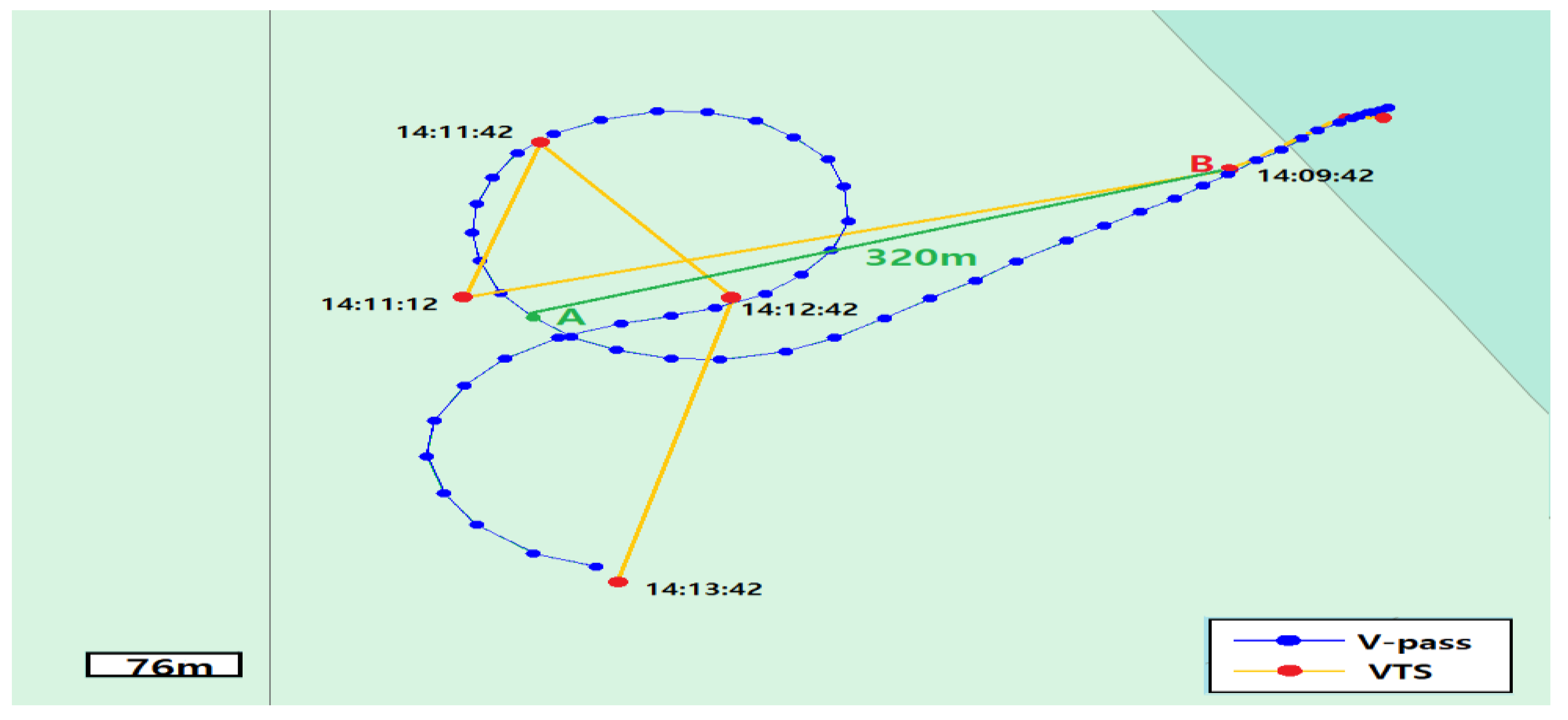
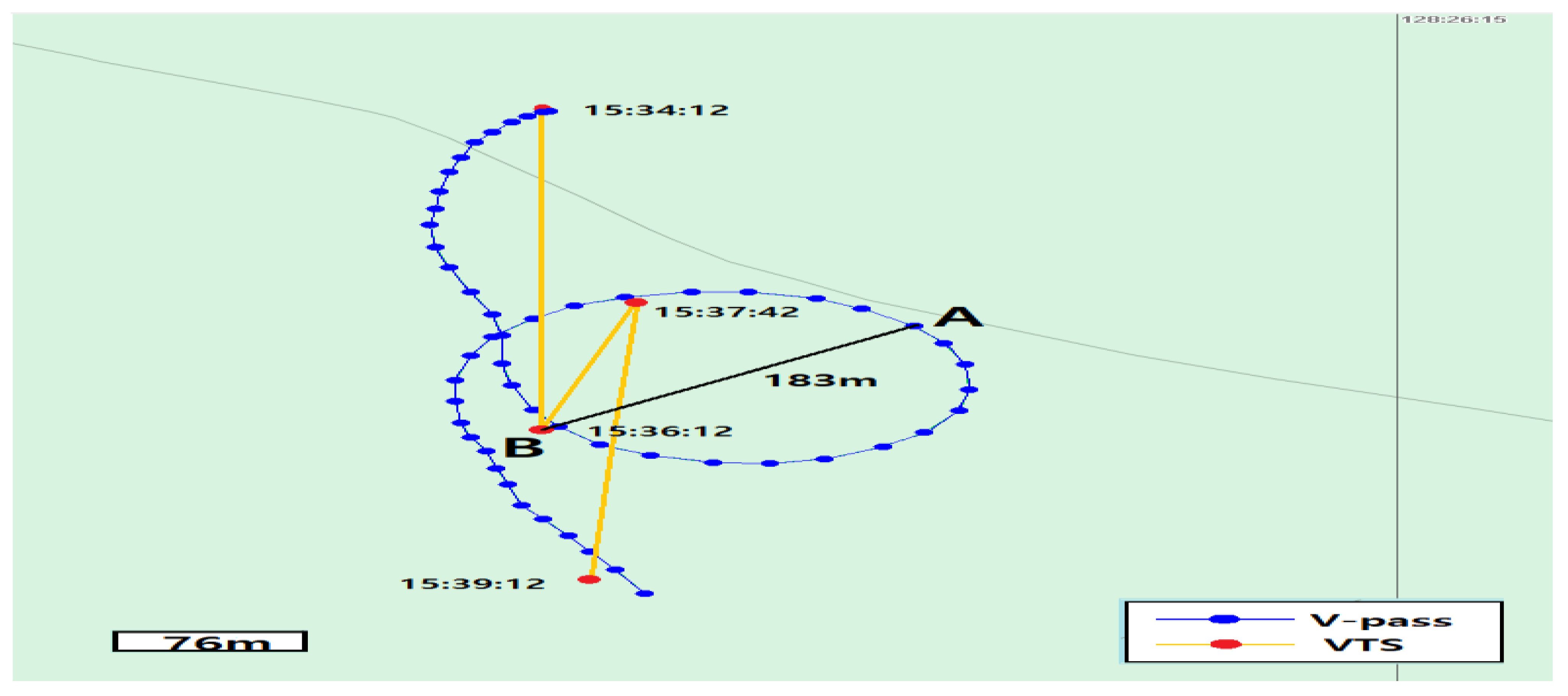
3.1. Comparison of the V-Pass and AIS Data Received by VTS
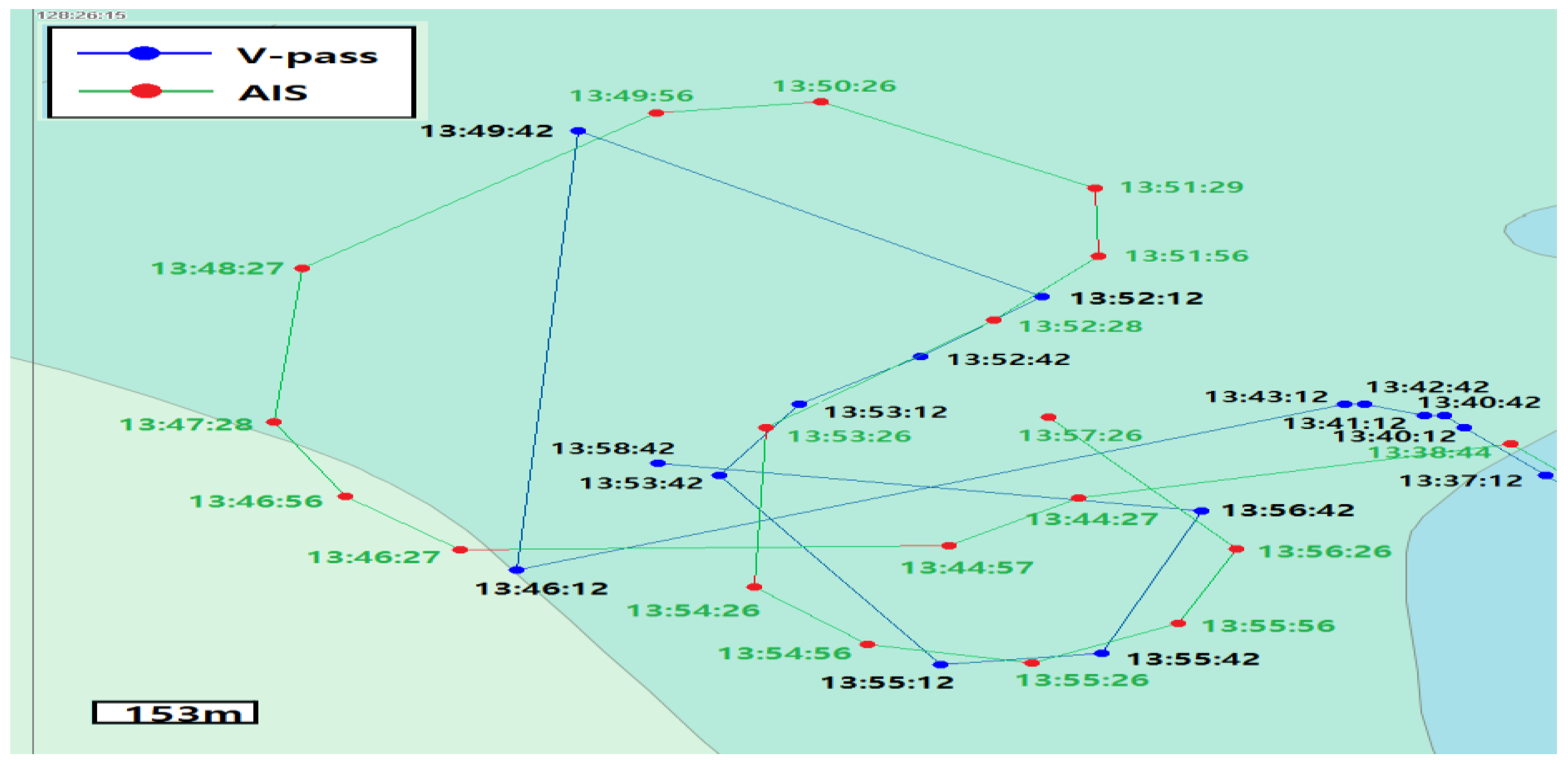
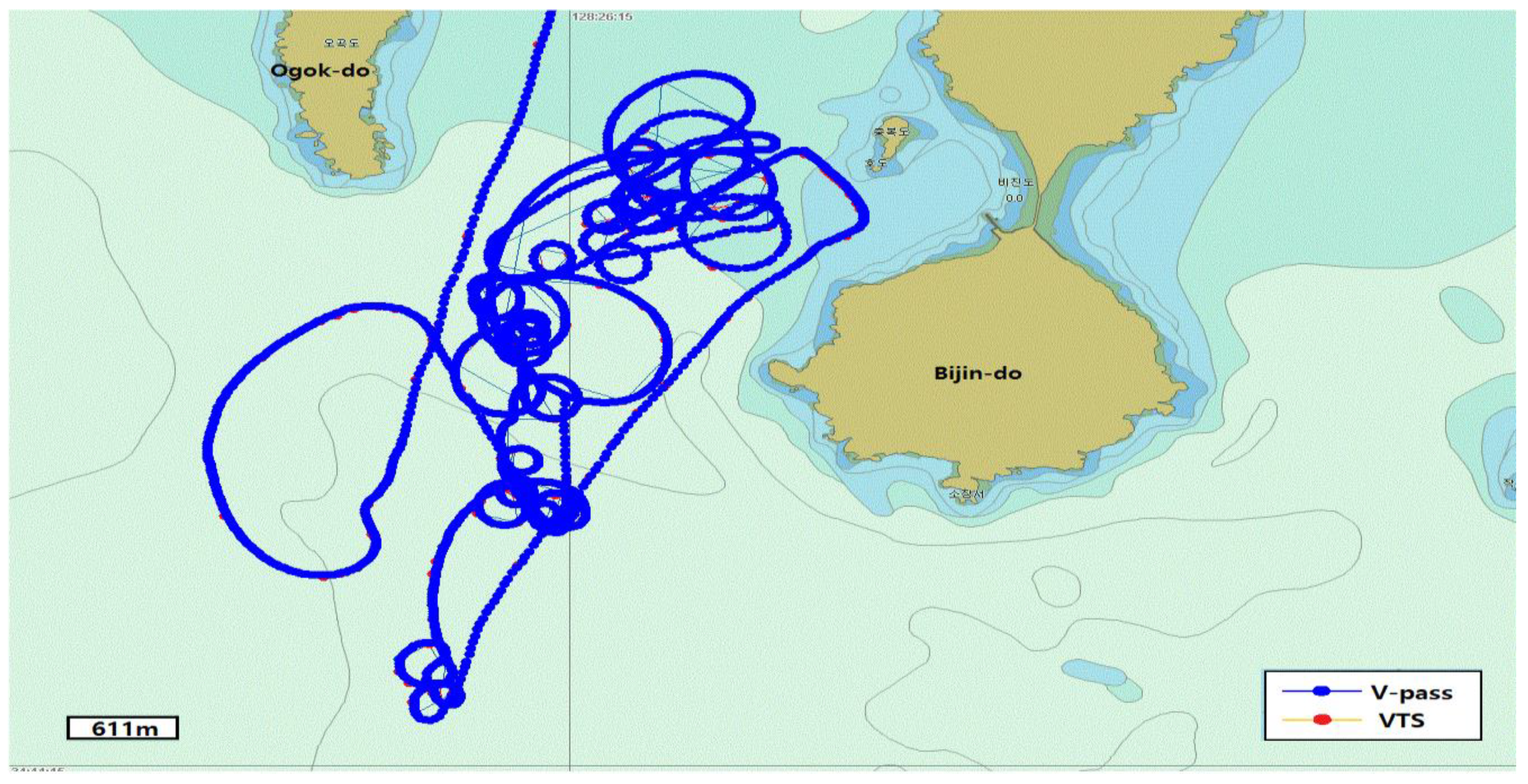
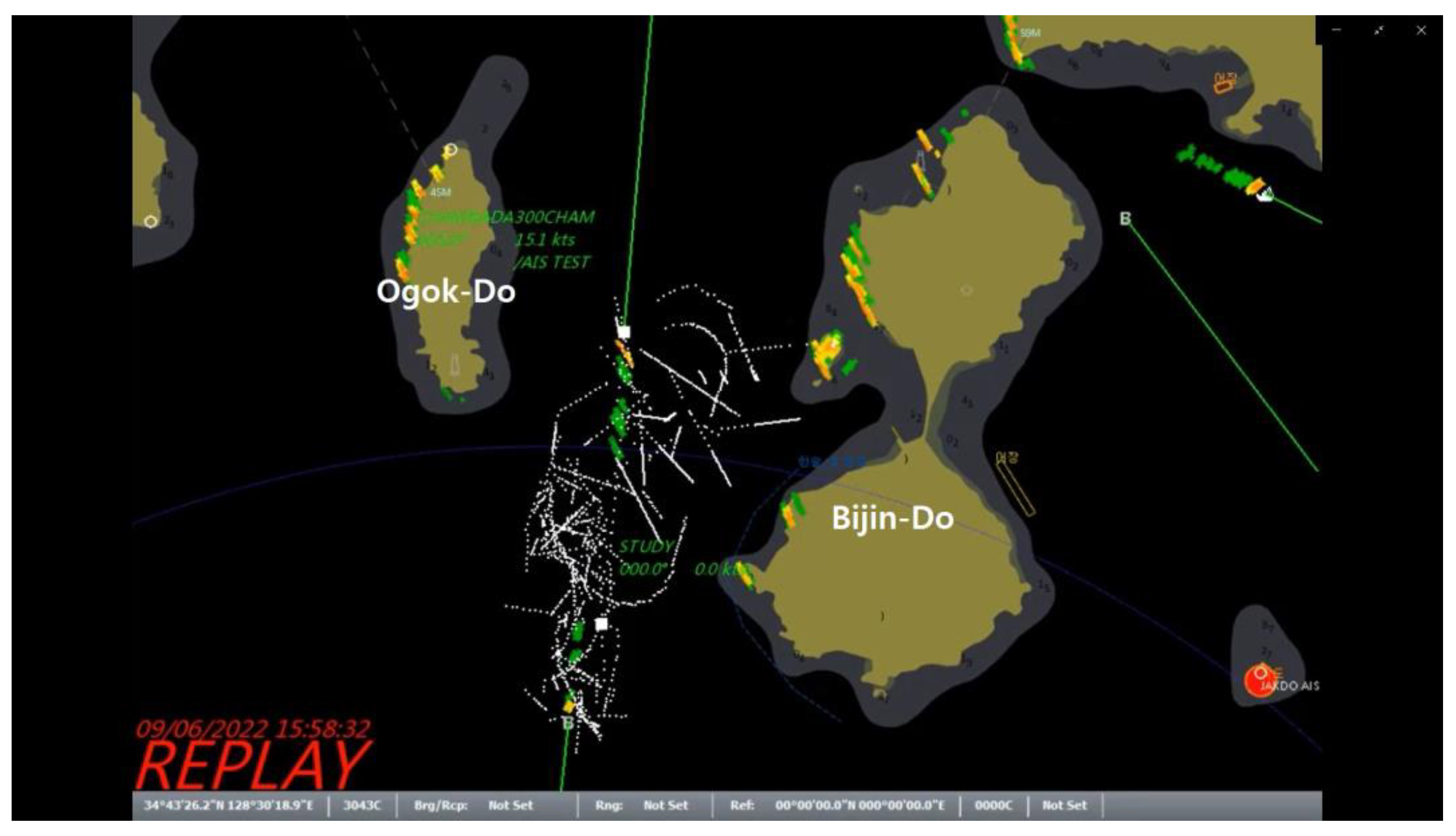
3.2. Comparison of the Data Saved in the V-Pass Terminal and the Data Received by VTS
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- National Statistical Portal. Marine Accident Statistics. Available online: https://kosis.kr (accessed on 17 April 2022).
- Korea Coast Guard. Statistical Yearbook of Marine Accidents; Korea Coast Guard: Incheon, Repubilc of Korea, 2022. [Google Scholar]
- Korea Coast Guard. Marine Accident Statistics; Korea Coast Guard: Incheon, Repubilc of Korea, 2021. [Google Scholar]
- Korea Information and Communication Technology Association. Wireless Data Communication Protocol V-Pass System. 2019. Available online: http://koreaict.kr/eng/ (accessed on 17 April 2022).
- Oh, J.H.; Kim, K.I.; Jeon, J.S.; Park, S.Y. A study on the risk analysis based on the trajectories of fishing vessel. J. Korean Inst. Navig. Port Res. 2014, 6a, 323–325. [Google Scholar]
- Park, J.H.; Jung, H.G.; Yang, C.S. Application of V-pass using HMM fishing boat activity prediction technique. J. Korean Soc. Coast. Disaster Prev. 2021, 8, 221–227. [Google Scholar] [CrossRef]
- TTAK. KO-06.0281; Wireless Data Communication Protocol for Maritime Security Safety Net. Telecommunications Technology Association: Seongnam, Republic of Korea, 2014. Available online: https://www.tta.or.kr/tta/ttaSearchView.do?key=77&rep=1&searchStandardNo=TTAK.KO-06.0281/R1&searchCate=TTAS (accessed on 17 April 2022).
- Choe, J.U.; Park, J.H.; Kim, H.J. A Basic Study on AIS-Based Navigation Data Analysis for Remote Situation Recognition of Autonomous Ship. J. Korean Inst. Navig. Port Res. 2020, 11a, 52–53. [Google Scholar]
- Jung, C.H.; Choi, W.K.; Park, S.H. A Study on the Improvement of AIS Equipmentthrough the Users Survey. J. Korean Marit. Police 2016, 6, 117–132. [Google Scholar]
- TTAK. KO-06.0281; Wireless Data Communication Protocol for V-Pass System. Telecommunications Technology Association: Seongnam, Republic of Korea, 2019. Available online: https://www.tta.or.kr/tta/ttaSearchView.do?key=77&rep=1&searchStandardNo=TTAK.KO-06.0281/R1&searchCate=TTAS (accessed on 17 April 2022).
- Han, H.R. A SpatioTemporal Variation Pattern Analysis of Fishing Activity in the Jeju Sea of Korea Using V-Pass Data. Ph.D. Thesis, Department of Spatial Information Engineering, The Graduate School Pukyong National University, Busan, Republic of Korea, 2021. [Google Scholar]
- Han, J.R.; Kim, T.H.; Choi, E.Y.; Choi, H.W. A study on the mapping of fishing activity using V-pass data—Focusing on the Southeast Sea of Korea. J. Korea Geogr. Inf. Soc. 2021, 24, 112–125. [Google Scholar]
- Kim, K.U.; Lee, W.J. A study on the advanced schemes on the welfare accommodation of fishing crew. J. Korea Ship Saf. Technol. Auth. 2012, 34, 2–17. [Google Scholar]
- Park, C.H.; Jung, B.K.; Lee, N.W. A study on the application of the navigation analysis system for the proof of ship crimes. Korean Assoc. Marit. Police Sci. 2022, 12, 85–104. [Google Scholar] [CrossRef]
- Korea Research Institute of Ships & Ocean Engineering. Development of Replay System of Ships’ Collision Accident; Research Service Report; Korea Research Institute of Ships & Ocean Engineering: Daejeon, Republic of Korea, 2014; Available online: https://www.kriso.re.kr/ (accessed on 17 April 2022).
- Ship Marine Plant Laboratory. Development of Marine Specialized Ship Collision Reproduction System; Research Service Report; Ship Marine Plant Laboratory: Daejeon, Republic of Korea, 2014; Available online: https://www.kriso.re.kr/ (accessed on 17 April 2022).
- Kim, J.W.; Jeong, M. Basic Study on Improving the Reliability of AIS data: Focused on Vessel Traffic Service Operators. J. Korea Marit. Police Assoc. 2021, 11, 49–68. [Google Scholar]
- An, J.O. A Study on the Utilization of Marine Safety Radio Facilities and the Efficiency of Frequency Utilization; Final Research Report; National Radio Research Institute: Naju-si, Republic of Korea, 2013; Available online: https://www.rra.go.kr/ (accessed on 17 April 2022).
- TTAK. KO-06.0281; Radio Data Communication Protocol Maritime Security Network. Telecommunications Technology Association: Seongnam, Republic of Korea, 2016. Available online: https://www.tta.or.kr/tta/ttaSearchView.do?key=77&rep=1&searchStandardNo=TTAK.KO-06.0281/R2&searchCate=TTAS (accessed on 17 April 2022).
- Kim, B.O. Message error probability analysis by AIS slot interference. In Proceedings of the Autumn Academic Conference of the Korean Society of Navigation and Harbour. J.Korean Institute Navig. Port Res. 2010, 10a, 164–166. [Google Scholar]
- Kim, D.Y.; Hong, T.H.; Jeong, J.S.; Lee, S.J. Building an algorithm for compensating AIS error data. J. Korean Inst. Intell. Syst. 2014, 24, 181–203. [Google Scholar]
- Jeong, J.S.; Yang, W.J. A study on the enhancement of utilization of automatic identification system. J. Korean. Soc. Mar. Environ. Saf. 2003, 9, 15–21. [Google Scholar]
- Kim, D.W.; Ha, M.J. A Study on the Collection and Utilization of Collected Information through V-pass System, Focusing on Infringement of Fundamental Rights and Legislative Solution. J. Korean Assoc. Marit. Police Sci. 2021, 9, 310–315. [Google Scholar] [CrossRef]
- Kim, K.I.; Jung, J.S.; Park, G.G. A Study on the Estimation of Center of Turning Circle of Anchoring Vessel using Automatic Identification System Data in VTS. J. Navig. Port Res. 2013, 8, 337–343. [Google Scholar] [CrossRef]
- Seo, K.Y.; Hong, T.H.; Park, G.G.; Choi, C.S. Analysis of Operational State and Radio Environmont of AIS. J. Korean Soc. Marit. Inf. Commun. 2005, 9, 177–180. [Google Scholar]
- Chao, C. A Study on Development of Expert System for Collision Avoidance and Navigation Based on AIS. Ph.D. Thesis, Department of Ship Operation Systems Engineering Graduate School of Korea Maritime and Ocean University, Busan, Republic of Korea, 2009. [Google Scholar]
- Last, P.; Bahlke, C.; Hering-Bertram, M.; Linsen, L. Comprehensive analysis of Automatic Identification System (AIS) data in regard to vessel movement prediction. J. Navig. 2014, 67, 791–809. [Google Scholar] [CrossRef]
- Lee, S.J.; Jeong, J.S.; Kim, M.Y.; Park, G.K. A study on real-time message analysis for AIS VDL load management. J. Korean Inst. Intell. Syst. 2013, 23, 236–261. [Google Scholar]
- Hu, Q.; Jiang, Y.; Zhang, J.; Sun, X.; Zhang, S. Development of an automatic identification system autonomous positioning system. Sensors 2015, 15, 28574–28591. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Liu, Z.; Wang, H.; Graham, T.; Wang, J. An analysis of factors affecting the severity of marine accidents. Reliab. Eng. Syst. Saf. 2021, 210, 07513. [Google Scholar] [CrossRef]
- Wang, X.; Xia, G.; Zhao, J.; Yang, Z.; Loughney, S.; Fang, S.; Zhang, S.; Xing, Y.; Liu, Z. A novel method for the risk assessment of human evacuation from cruise ships in maritime transportation. Reliab. Eng. Syst. Saf. 2023, 230, 108887. [Google Scholar] [CrossRef]
- Fang, S.; Liu, Z.; Wang, X.; Wang, J.; Yang, Z. Simulation of evacuation in an inclined passenger vessel based on an improved social force model. Saf. Sci. 2022, 148, 105675. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dynamic Condition of the Ship | Nominal Reporting Interval |
|---|---|
| Ship at anchor or moored and not moving faster than 3 knots | 3 min |
| Ship at anchor or moored and moving faster than 3 knots | 10 s |
| Ship moving at 0–14 knots | 10 s |
| Ship moving at 0–14 knots and changing course | 3.3 s |
| Ship moving at 14–23 knots | 6 s |
| Ship moving at 14–23 knots and changing course | 2 s |
| Ship moving at >23 knots | 2 s |
| Ship moving at >23 knots and changing course | 2 s |
| Dynamic Condition of the Ship | Nominal Reporting Interval |
|---|---|
| Ship not moving faster than 2 knots | 3 min |
| Ship moving at 2–14 knots | 30 s |
| Ship moving at 14–23 knots | 15 s |
| Ship moving at >23 knots | 5 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, C.-H.; Jung, B.-K.; Choi, W.-S. Investigating the Reliability of the Location Transmitted by V-Pass Terminals: Prompt Rescue of Fishing Vessels. J. Mar. Sci. Eng. 2023, 11, 1023. https://doi.org/10.3390/jmse11051023
Park C-H, Jung B-K, Choi W-S. Investigating the Reliability of the Location Transmitted by V-Pass Terminals: Prompt Rescue of Fishing Vessels. Journal of Marine Science and Engineering. 2023; 11(5):1023. https://doi.org/10.3390/jmse11051023
Chicago/Turabian StylePark, Cheor-Hong, Bong-Kyu Jung, and Won-Sam Choi. 2023. "Investigating the Reliability of the Location Transmitted by V-Pass Terminals: Prompt Rescue of Fishing Vessels" Journal of Marine Science and Engineering 11, no. 5: 1023. https://doi.org/10.3390/jmse11051023
APA StylePark, C. -H., Jung, B. -K., & Choi, W. -S. (2023). Investigating the Reliability of the Location Transmitted by V-Pass Terminals: Prompt Rescue of Fishing Vessels. Journal of Marine Science and Engineering, 11(5), 1023. https://doi.org/10.3390/jmse11051023