
Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control

Abstract
:1. Introduction
2. AUV Model and Decoupling
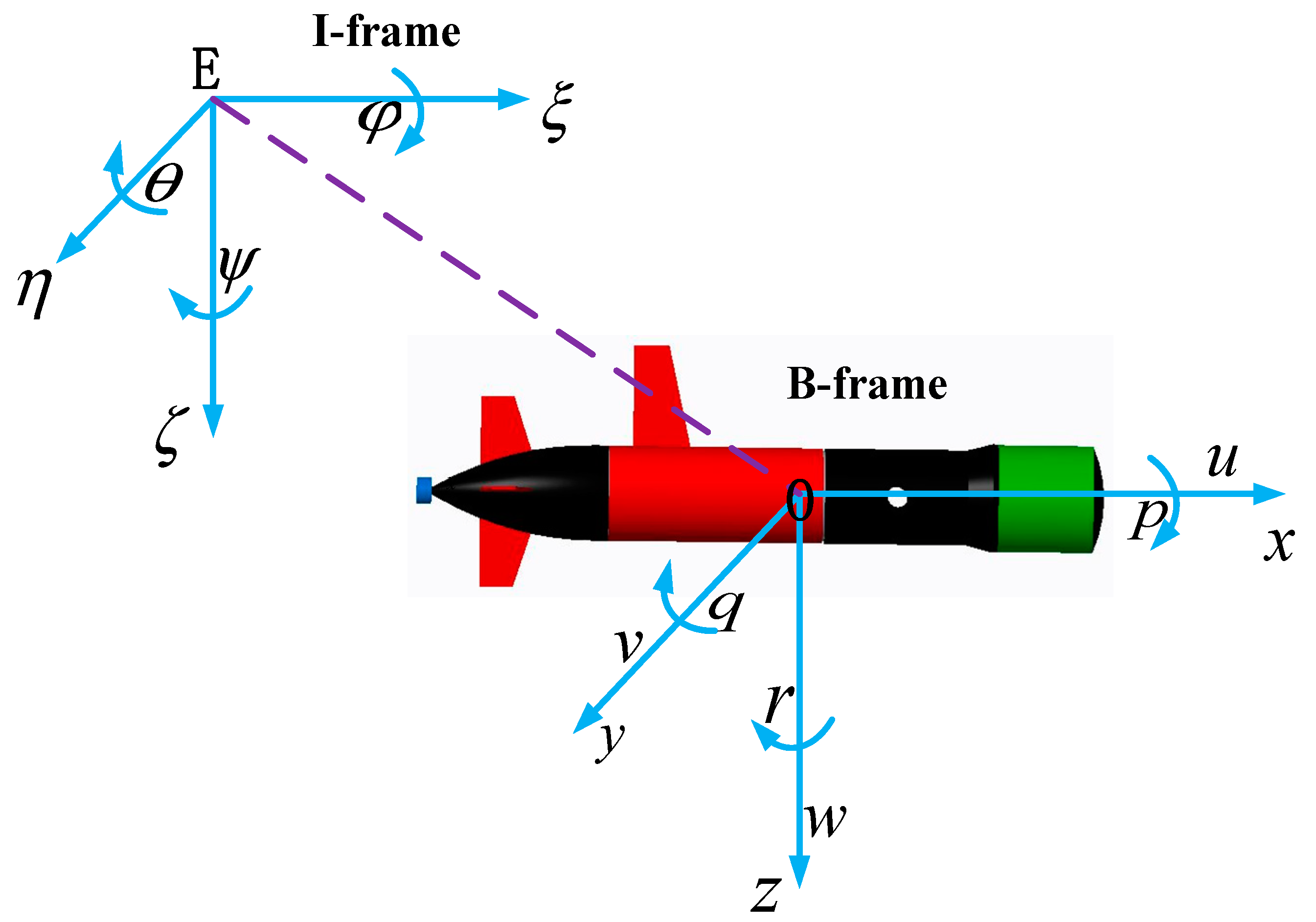
2.1. AUV Kinematics and Dynamics
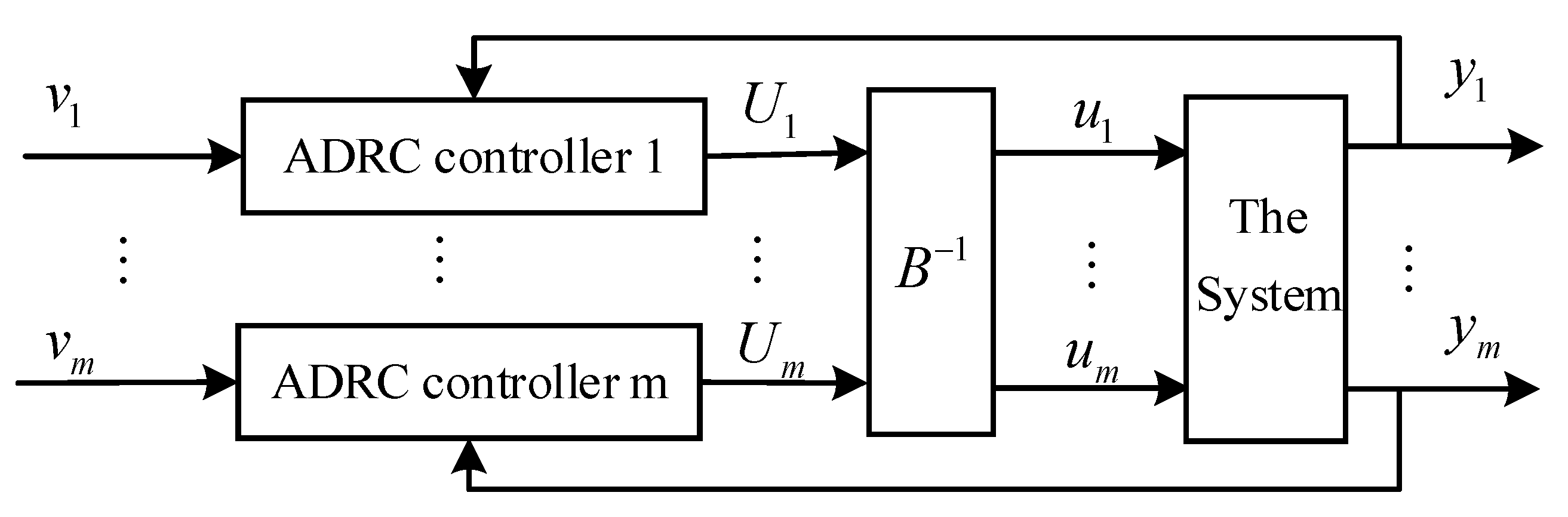
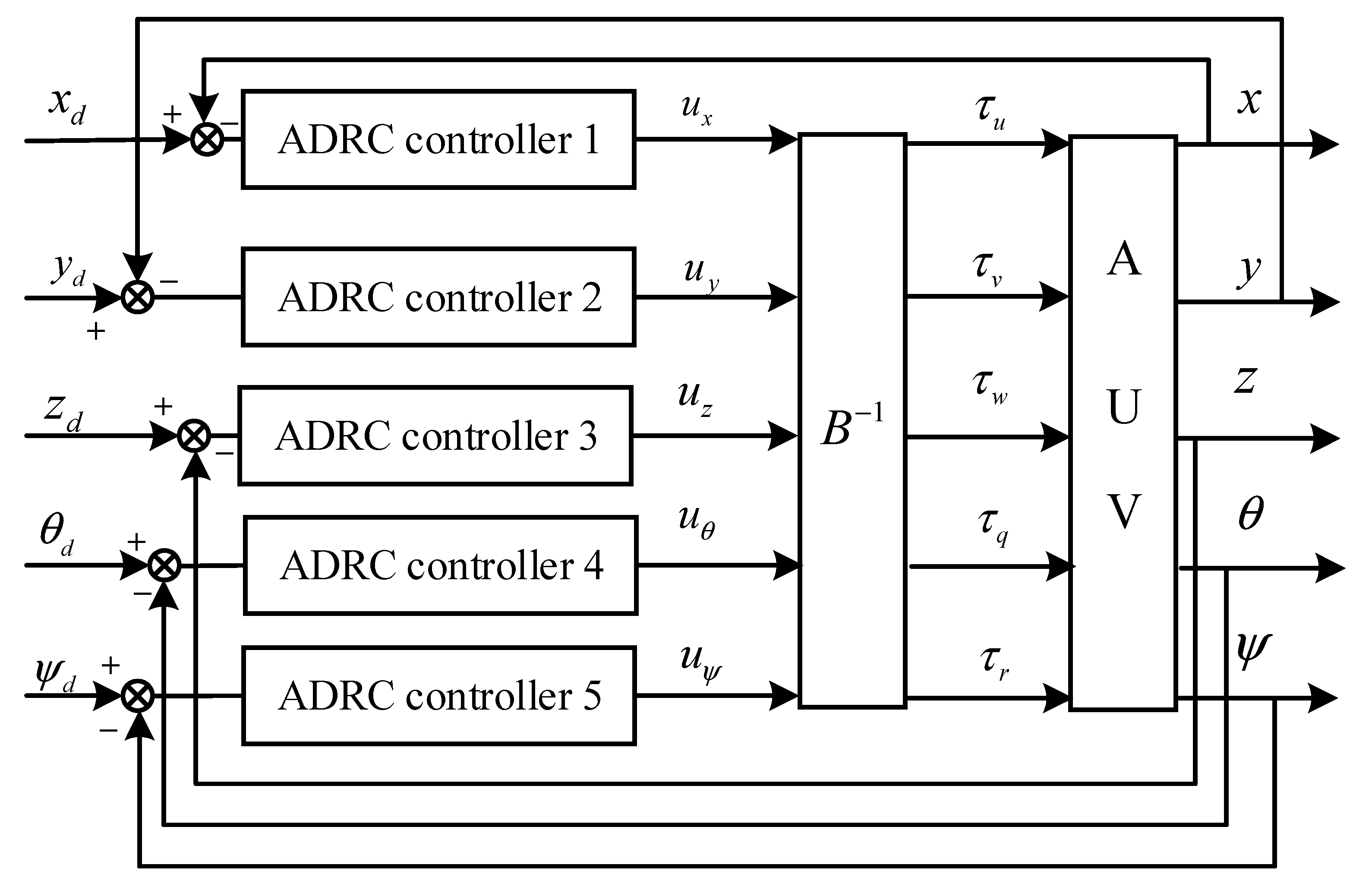
2.2. Decoupling Control of AUV Model
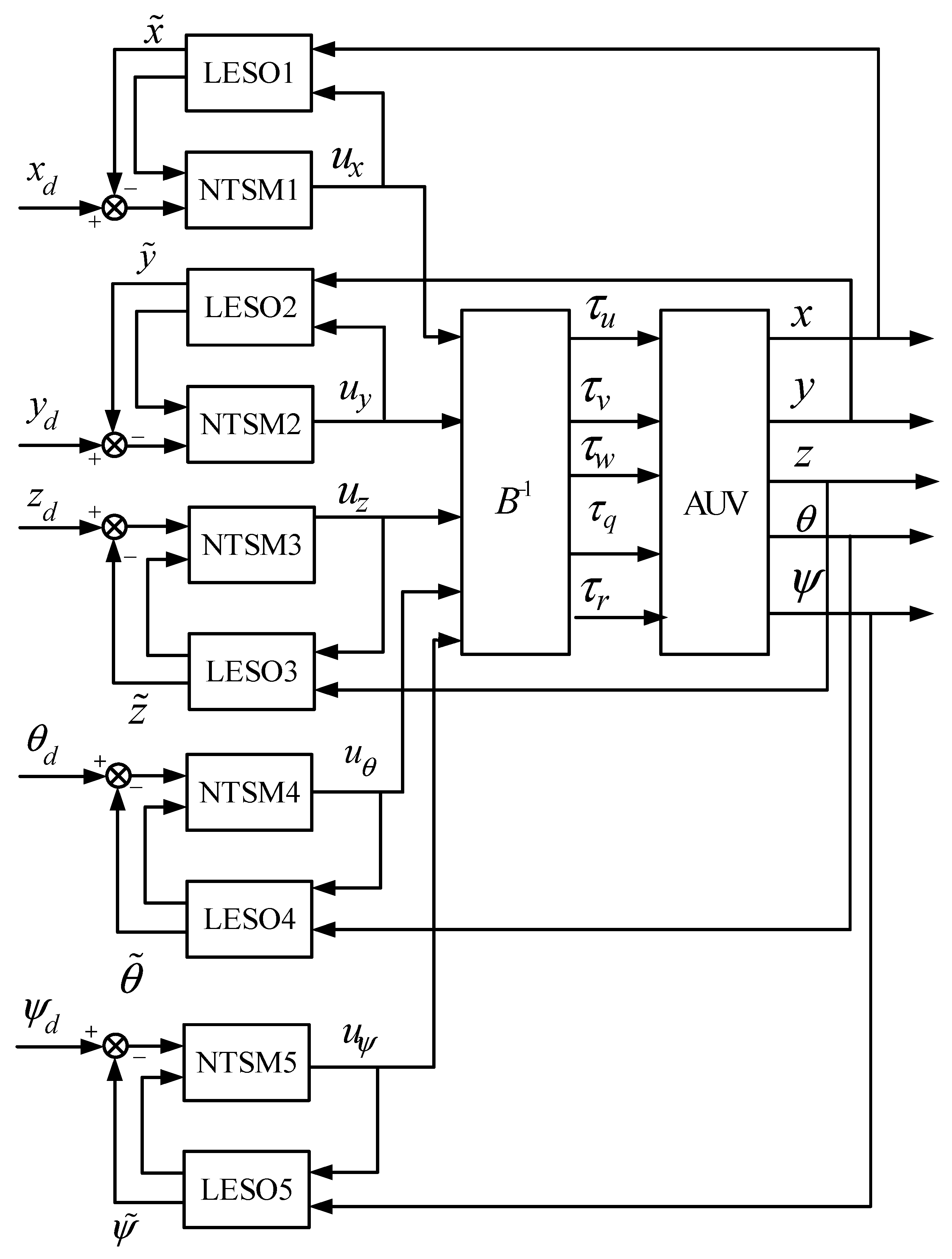
3. Three-Dimensional Trajectory Tracking Controller Design
3.1. Linear Extended State Observer Design
3.2. Design of NTSM Nonlinear States Error Feedback Control Law
3.3. System Stability Analysis
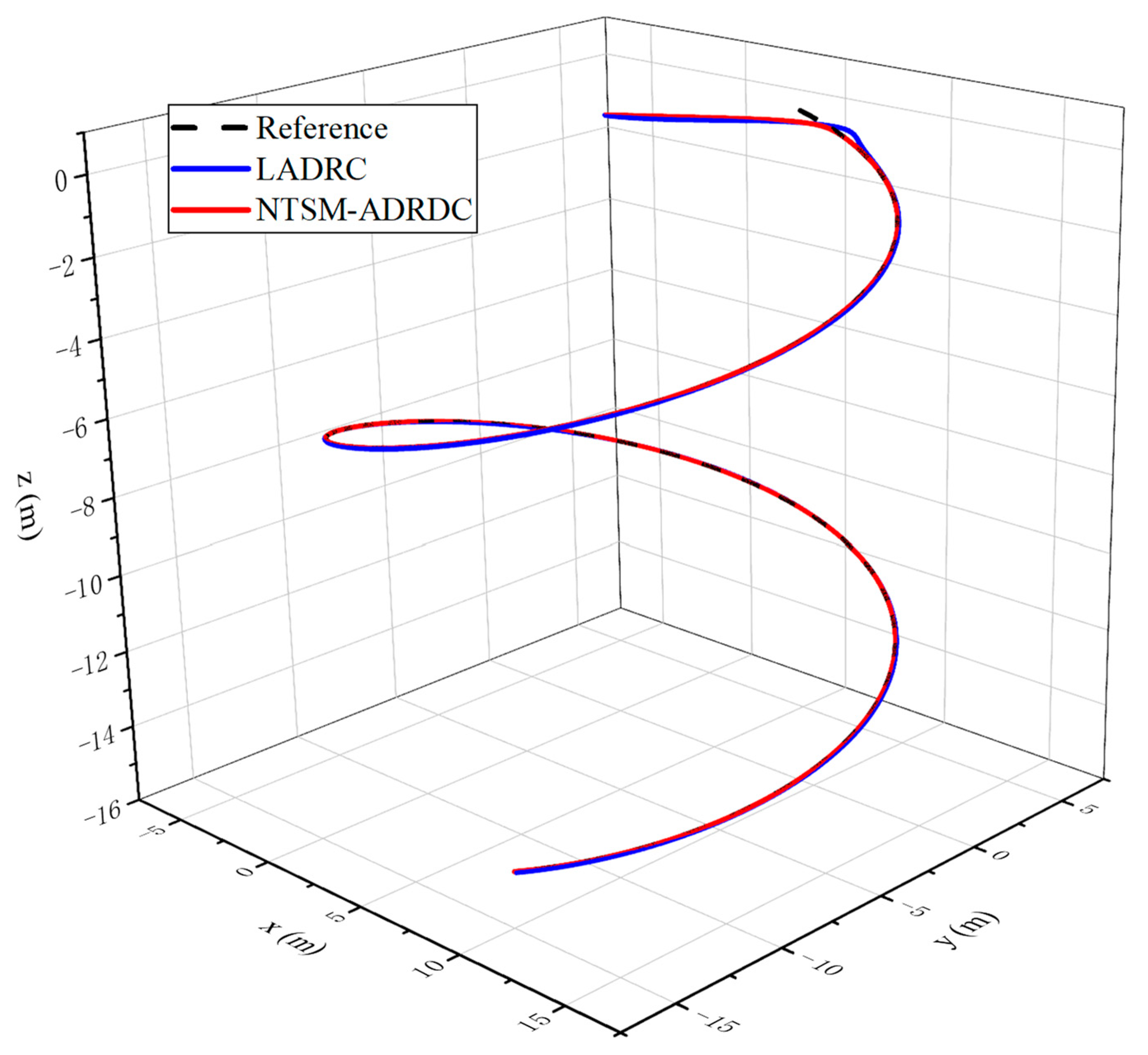
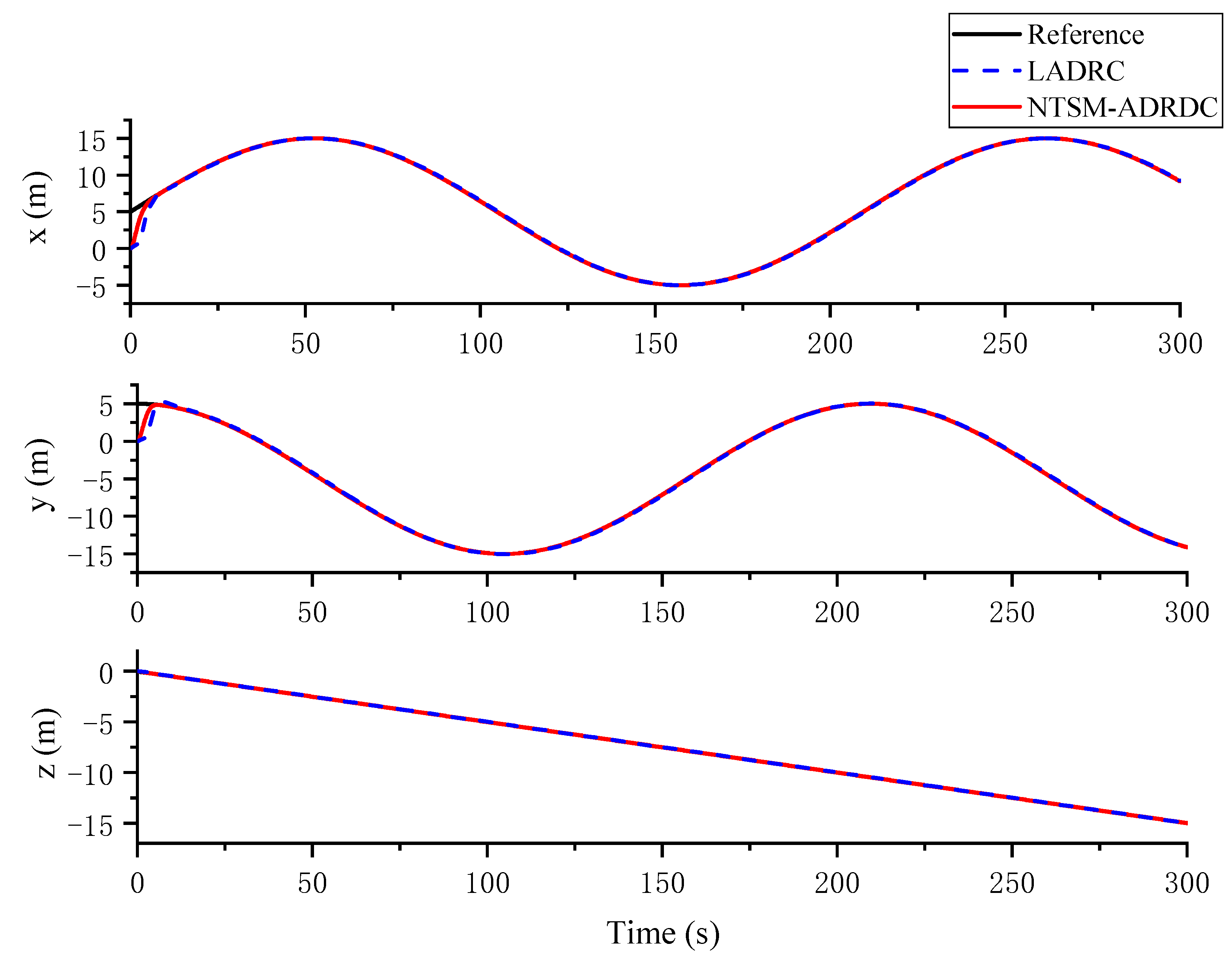
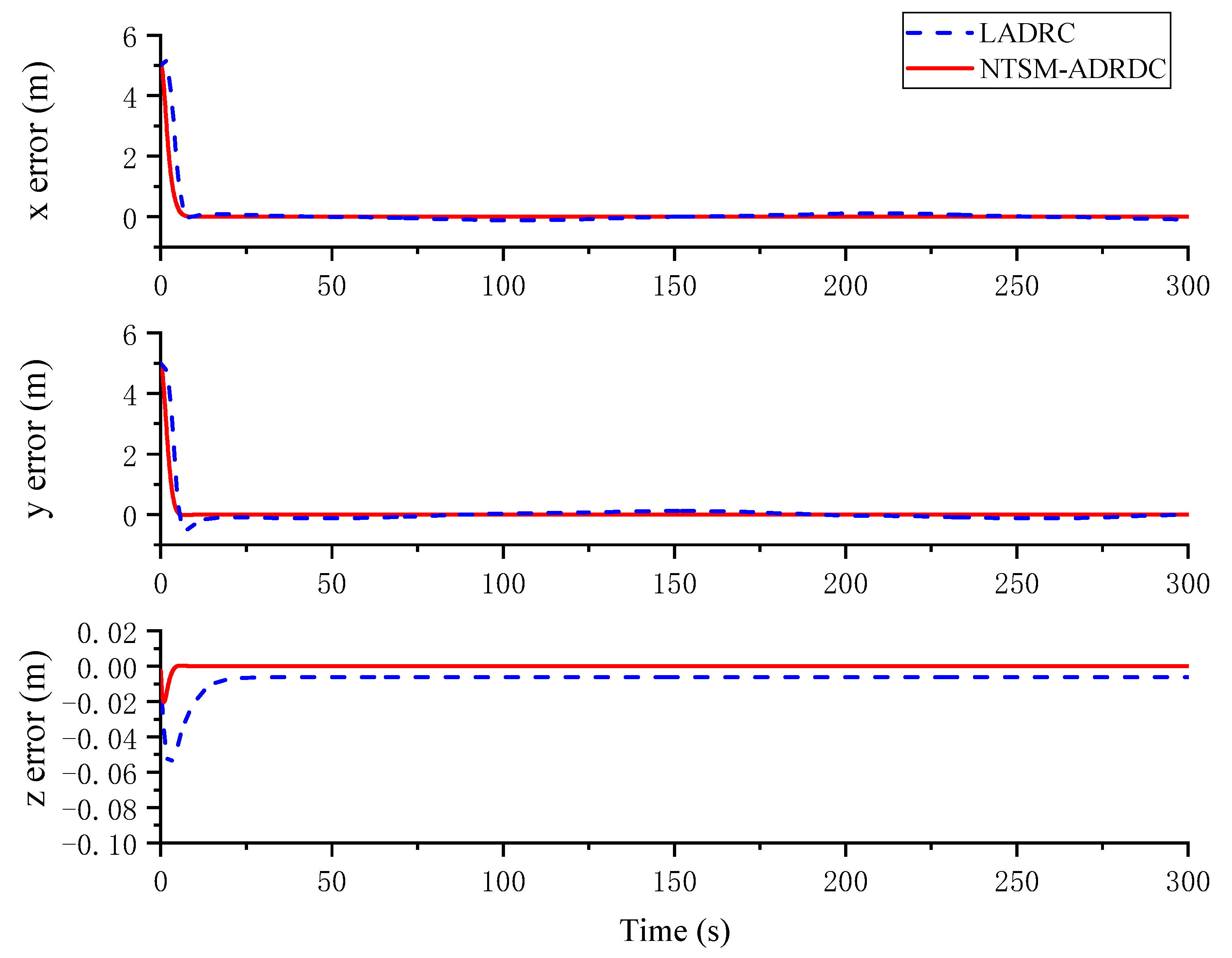
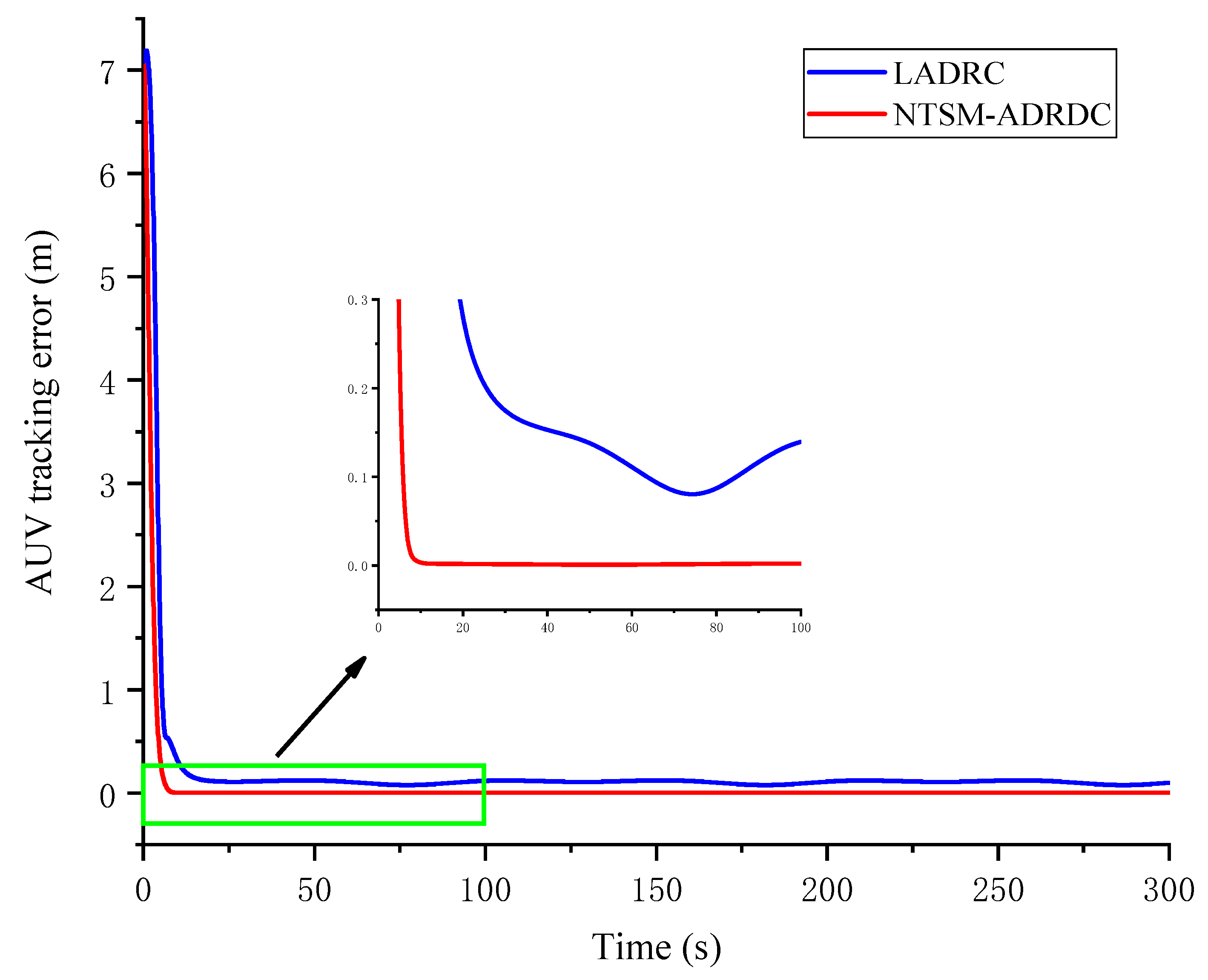
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wynn, R.B.; Huvenne, V.A.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J. Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Palomeras, N.; Vallicrosa, G.; Mallios, A.; Bosch, J.; Vidal, E.; Hurtos, N.; Carreras, M.; Ridao, P. AUV homing and docking for remote operations. Ocean Eng. 2018, 154, 106–120. [Google Scholar] [CrossRef]
- An, L.; Li, Y.; Cao, J.; Jiang, Y.; He, J.; Wu, H. Proximate time optimal for the heading control of underactuated autonomous underwater vehicle with input nonlinearities. Appl. Ocean Res. 2020, 95, 102002. [Google Scholar] [CrossRef]
- Yan, Z.; Yu, H.; Zhang, W. Globally finite-time stable tracking control of underactuated UUVs. Ocean Eng. 2015, 107, 106–120. [Google Scholar] [CrossRef]
- Yan, Z.; Gong, P.; Zhang, W.; Wu, W.H. Model predictive control of autonomous underwater vehicles for trajectory tracking with external disturbances. Ocean Eng. 2020, 217, 107884. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, Y.Q.; Wang, L.F.; Cao, J.; Zhang, G.C. Intelligent PID guidance control for AUV path tracking. J. Cent. South Univ. 2015, 22, 3440–3449. [Google Scholar] [CrossRef]
- Robert, S.M.; Brett, W.H.; Lance, M. Docking control system for a 54-cm-diameter (21-in) AUV. IEEE J. Oceanic. Eng. 2009, 33, 550–562. [Google Scholar]
- Liang, X.; Qu, X.; Wang, N. Three-Dimensional Trajectory Tracking of an Underactuated AUV based on Fuzzy Dynamic Surface Control. IET Intell. Transp. Syst. 2019, 14, 364–370. [Google Scholar] [CrossRef]
- Yin, J.C.; Wang, N. Predictive Trajectory Tracking Control of Autonomous Underwater Vehicles Based on Variable Fuzzy Predictor. Int. J. Fuzzy Syst. 2020, 23, 1809–1822. [Google Scholar] [CrossRef]
- Rezazadegan, F.; Shojaei, K.; Sheikholeslam, F.; Chatraei, A. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties. Ocean Eng. 2015, 107, 246–258. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Adaptive disturbance observer for trajectory tracking control of underwater vehicles. Ocean Eng. 2020, 200, 107080. [Google Scholar] [CrossRef]
- Park, B.S. Neural Network-Based Tracking Control of Underactuated Autonomous Underwater Vehicles with Model Uncertainties. J. Dyn. Syst.-T Asme. 2015, 137, 021004. [Google Scholar] [CrossRef]
- Eski, K.; Yldrm, S. Design of Neural Network Control System for Controlling Trajectory of Autonomous Underwater Vehicles. Int. J. Adv. Robot. Syst. 2014, 11, 1–17. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Liu, X.F.; Liu, M.Z.; Yang, C.G. MPC-based 3-D trajectory tracking for an autonomous underwater vehicle with constraints in complex ocean environments. Ocean Eng. 2019, 189, 106309. [Google Scholar] [CrossRef]
- Chao, S.; Yang, S.; Buckham, B. Path-Following Control of an AUV: A Multiobjective Model Predictive Control Approach. IEEE Trans. Control Syst. Technol. 2019, 27, 1334–1342. [Google Scholar]
- Chao, S.; Yang, S.; Buckham, B. Integrated Path Planning and Tracking Control of an AUV: A Unified Receding Horizon Optimization Approach. IEEE ASME Trans. Mechatron. 2017, 22, 1163–1173. [Google Scholar]
- Przybyła, M.; Kordasz, M.; Madoński, R.; Herman, P.; Sauer, P. Active Disturbance Rejection Control of a 2DOF manipulator with significant modeling uncertainty. Bull. Pol. Acad. Sci. 2012, 60, 509–520. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, Y. Active disturbance rejection control based robust output feedback autopilot design for airbreathing hypersonic vehicles. ISA Trans. 2018, 74, 7–15. [Google Scholar] [CrossRef]
- Yang, H.J.; Chen, L. Active Disturbance Rejection Attitude Control for a Dual Closed-Loop Quadrotor Under Gust Wind. IEEE Trans. Contr. Syst. Technol. 2018, 26, 1400–1405. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.Y.; Zhu, X.Y. A high-performance flight control approach for quadrotors using a modified active disturbance rejection technique. Robot. Auton. Syst. 2016, 83, 177–187. [Google Scholar] [CrossRef]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Han, J. The “extended state observer” of a class of uncertain systems. Control Decis. 1995, 10, 85–88. [Google Scholar]
- Han, J.Q. Auto-disturbance rejection controller and it’s applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 2399–2405. [Google Scholar]
- Gao, Z.Q.; Guo, B. Active disturbance rejection control approach to stabilization of lower triangular systems with uncertainty. Int. J. Robust. Nonlin. 2015, 26, 2314–2337. [Google Scholar]
- Chen, M.; Chen, W.H. Sliding mode control for a class of uncertain nonlinear system based on disturbance observer. Int. J. Adapt Control 2010, 24, 51–64. [Google Scholar] [CrossRef]
- Besnard, L.; Shtessel, Y.; Landrum, B. Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer. J. Frankl. Inst. 2012, 349, 658–684. [Google Scholar] [CrossRef]
- Ismail, Z.H.; Putranti, W.E. Second Order Sliding Mode Control Scheme for an Autonomous Underwater Vehicle with Dynamic Region Concept. Math. Probl. Eng. 2015, 2, 11–13. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Zhang, W.W.; Wang, J. Nonsingular Terminal sliding model control based on exponential reaching law. Control Decis. 2012, 27, 909–913. [Google Scholar]
- Sahu, B.K.; Subudhi, B.J.I.; Jo, A. Adaptive Tracking Control of an Autonomous Underwater Vehicle. Int. J. Autom. Comput. 2014, 11, 299–307. [Google Scholar] [CrossRef]
- Fossen, T.I. Handbook of Marine Craft Hydrodynamics and Motion Control; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley & Sons Inc.: Chichester, UK, 1994. [Google Scholar]
- Han, J. Active Disturbance Rejection Control Technology—The Control Technology for Estimating and Compensating the Uncertainties; China Defensive Industry Press: Beijing, China, 2008. [Google Scholar]
- Chen, Z.Q.; Sun, M.W.; Yang, R.G. On the stability of linear disturbance rejection control. Acta Autom. Sin. 2013, 39, 574–580. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.Q.; Sun, M.W. Trajectory tracking control of a quadrotor UAV based on sliding mode active disturbance rejection control. Nonlinear Anal.-Model. 2019, 24, 545–560. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, L.F.; Zhang, J.Z. Path Following Control of Autonomous Ground Vehicle Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Control. IEEE Trans. Veh. Technol. 2019, 68, 6379–6390. [Google Scholar] [CrossRef]
- Gao, Z. Scaling and parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4989–4996. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hydrodynamic Parameters | Damping Coefficients |
|---|---|
| = 215 kg | = (70 + 100) kg/s |
| = 265 kg | = (100 + 200) kg/s |
| = 265 kg | = (100 + 100) kg/s |
| = 80 kg.m2 | = (50 + 100) kg.m2/s |
| = 80 kg.m2 | = (50 + 100) kg.m2/s |
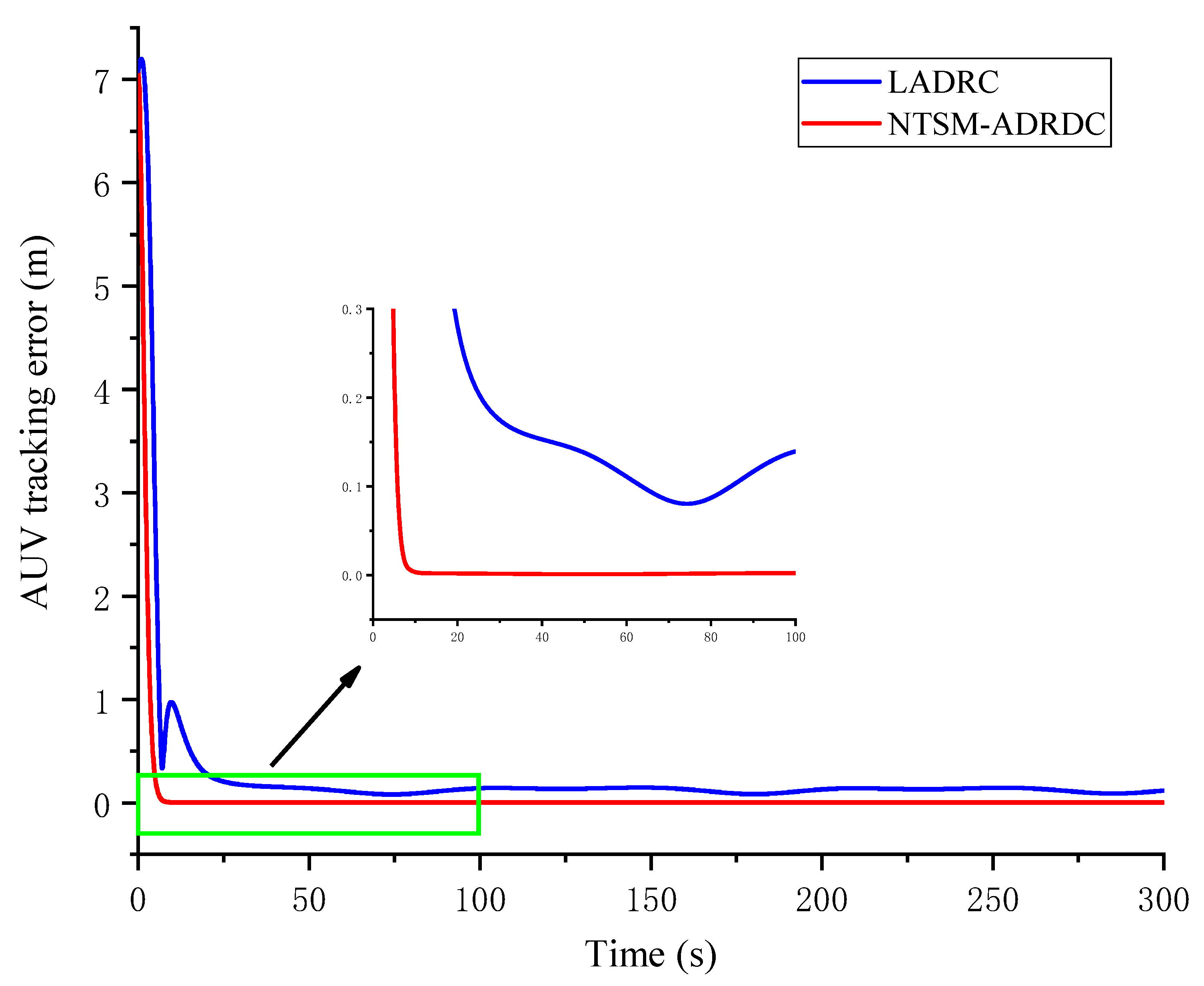
| Methods | Max (m) | Min (m) | Avg (m) |
|---|---|---|---|
| LADRC | 0.12163 | 0.07649 | 0.10533 |
| NTSM-ADRDC | 0.00158 | 0.00131 | 0.00146 |
| Methods | Max (m) | Min (m) | Avg (m) |
|---|---|---|---|
| LADRC | 0.20466 | 0.08036 | 0.12461 |
| NTSM-ADRDC | 0.00227 | 0.00143 | 0.00162 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Wu, W.; Li, Z.; Du, X.; Yan, Z. Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control. J. Mar. Sci. Eng. 2023, 11, 959. https://doi.org/10.3390/jmse11050959
Zhang W, Wu W, Li Z, Du X, Yan Z. Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control. Journal of Marine Science and Engineering. 2023; 11(5):959. https://doi.org/10.3390/jmse11050959
Chicago/Turabian StyleZhang, Wei, Wenhua Wu, Zixuan Li, Xue Du, and Zheping Yan. 2023. "Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control" Journal of Marine Science and Engineering 11, no. 5: 959. https://doi.org/10.3390/jmse11050959
APA StyleZhang, W., Wu, W., Li, Z., Du, X., & Yan, Z. (2023). Three-Dimensional Trajectory Tracking of AUV Based on Nonsingular Terminal Sliding Mode and Active Disturbance Rejection Decoupling Control. Journal of Marine Science and Engineering, 11(5), 959. https://doi.org/10.3390/jmse11050959