3.1. A Single Tank Outflow Experiment to Measure the Discharge Coefficient
In the EU project Flooding Accident Response (FLARE) ), an experiment was conducted to establish an average discharge coefficient for the typical openings used between compartments in model experiments. The obtained discharge coefficient was used in the FLARE benchmark study [
2] to obtain a fair comparison between different simulation codes applied.
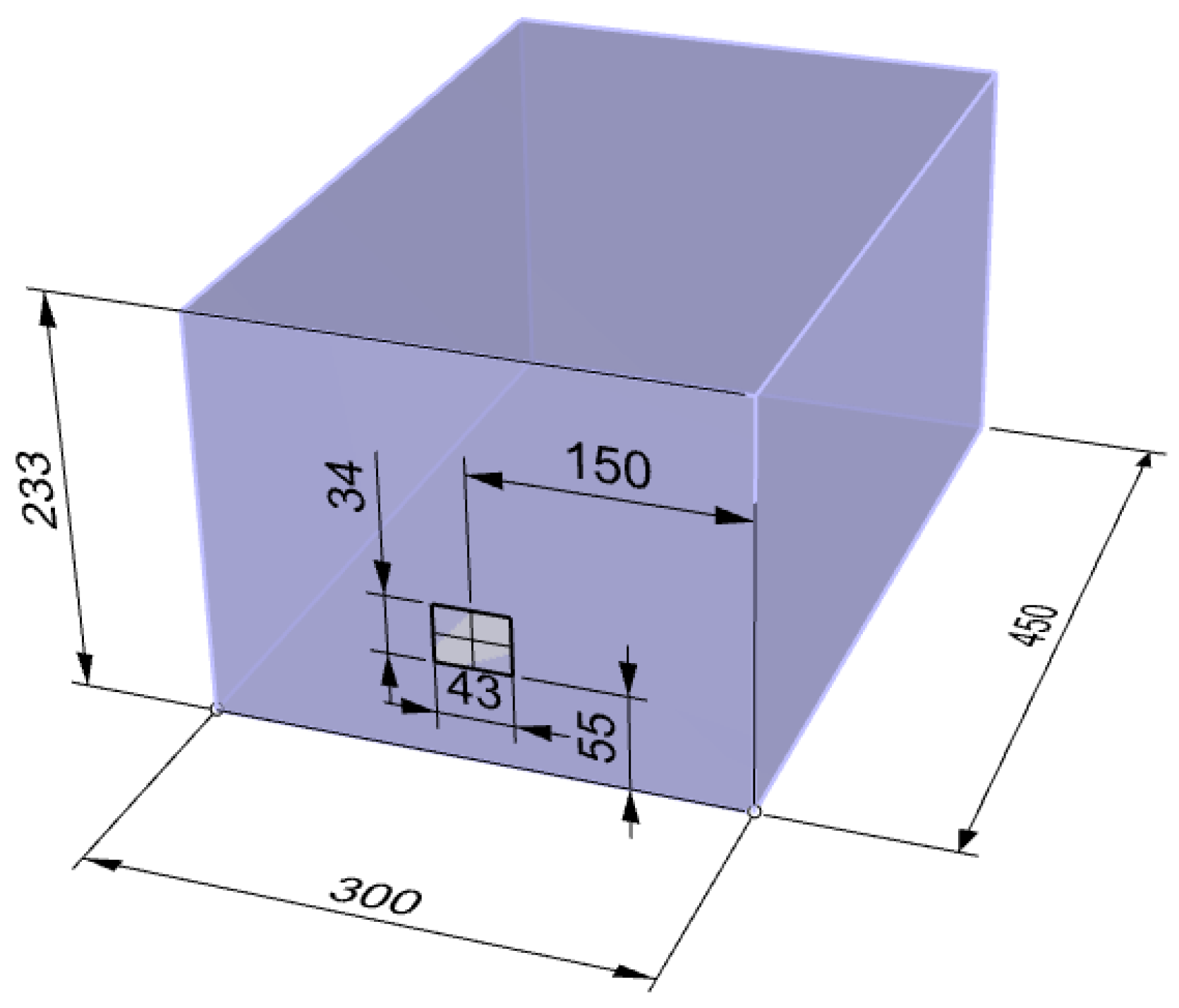
The configuration of the experiment is shown in
Figure 2. The rectangular box internal space measures L × B × H of 300 × 450 × 233 mm. A sharp-edged opening of
mm and
mm was fitted at 55 mm from the bottom of the tank. The wall thickness of the orifice was 2 mm. The wall thickness of the box is not shown in the figure. The box was vented by an opening at the top of 7.0 cm
2. At the start of the simulation, the compartment was completely full. A vertical sliding door was used to open the box quickly. The water level was measured at two locations (corners) in the box at 200 Hz, showing nearly identical results.
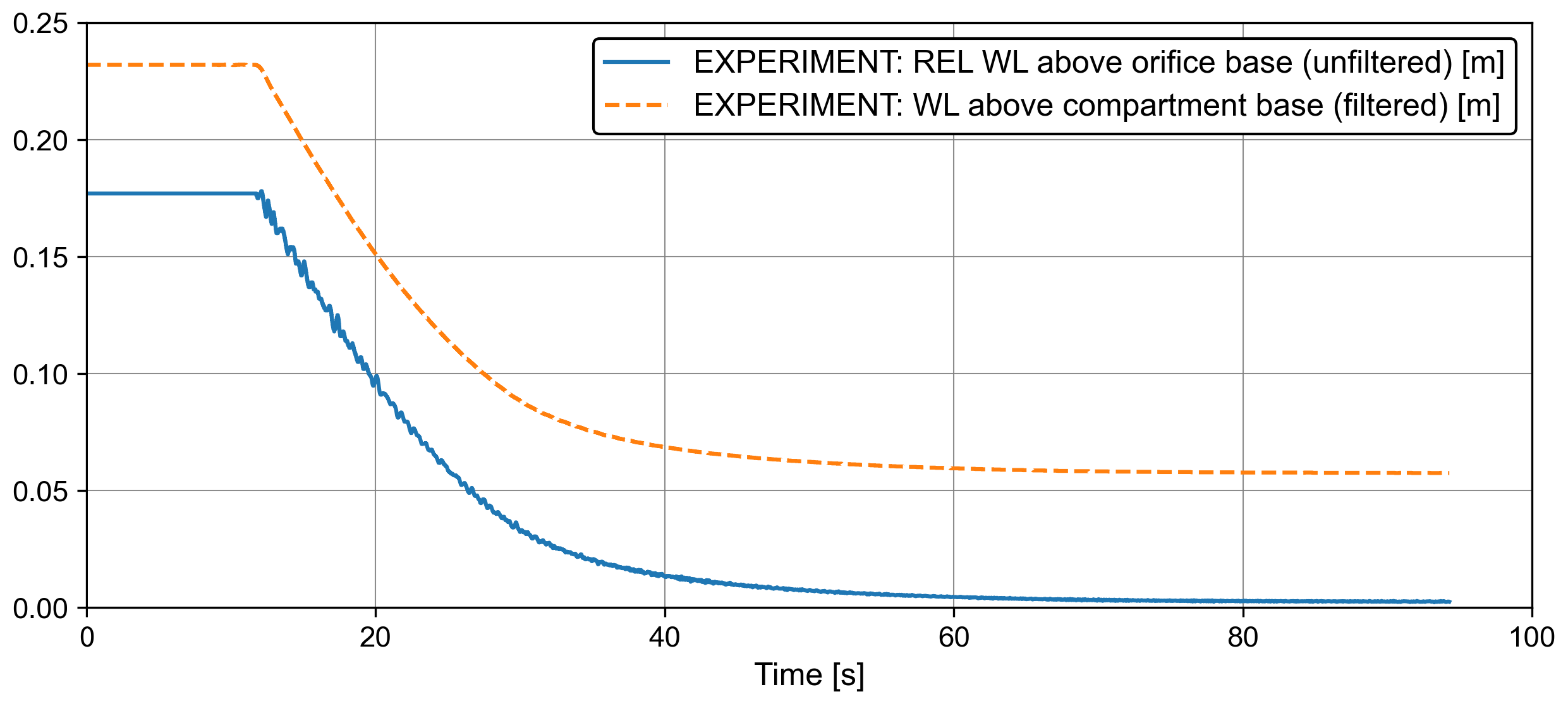
The water height measured at one sensor (given w.r.t. orifice base) and the low-pass filter-averaged water height (given w.r.t. compartment base) are shown in
Figure 3. As observed, the compartment does not drain to exactly the orifice lower edge (55 mm above base); a small meniscus of about 2.5 mm water remains at the opening.
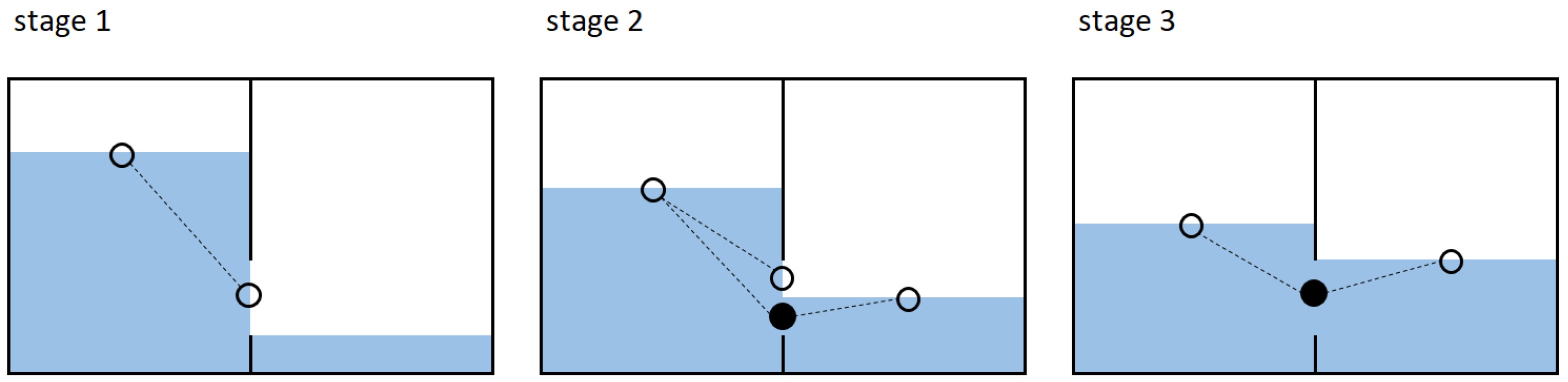
The flow rate
Q through the opening should match the flow rate calculated from the water height surface decline over time. The discharge through the opening can be calculated, assuming a steady state flow:
where
is the water height above the top edge of the orifice and
is the water height above the bottom edge. When the water falls below the top edge,
is zero. Using Equation (
12), the discharge coefficient
in the experiment was derived. From the flow rate through the opening and its wetted surface
, an average discharge velocity
and a Reynolds number
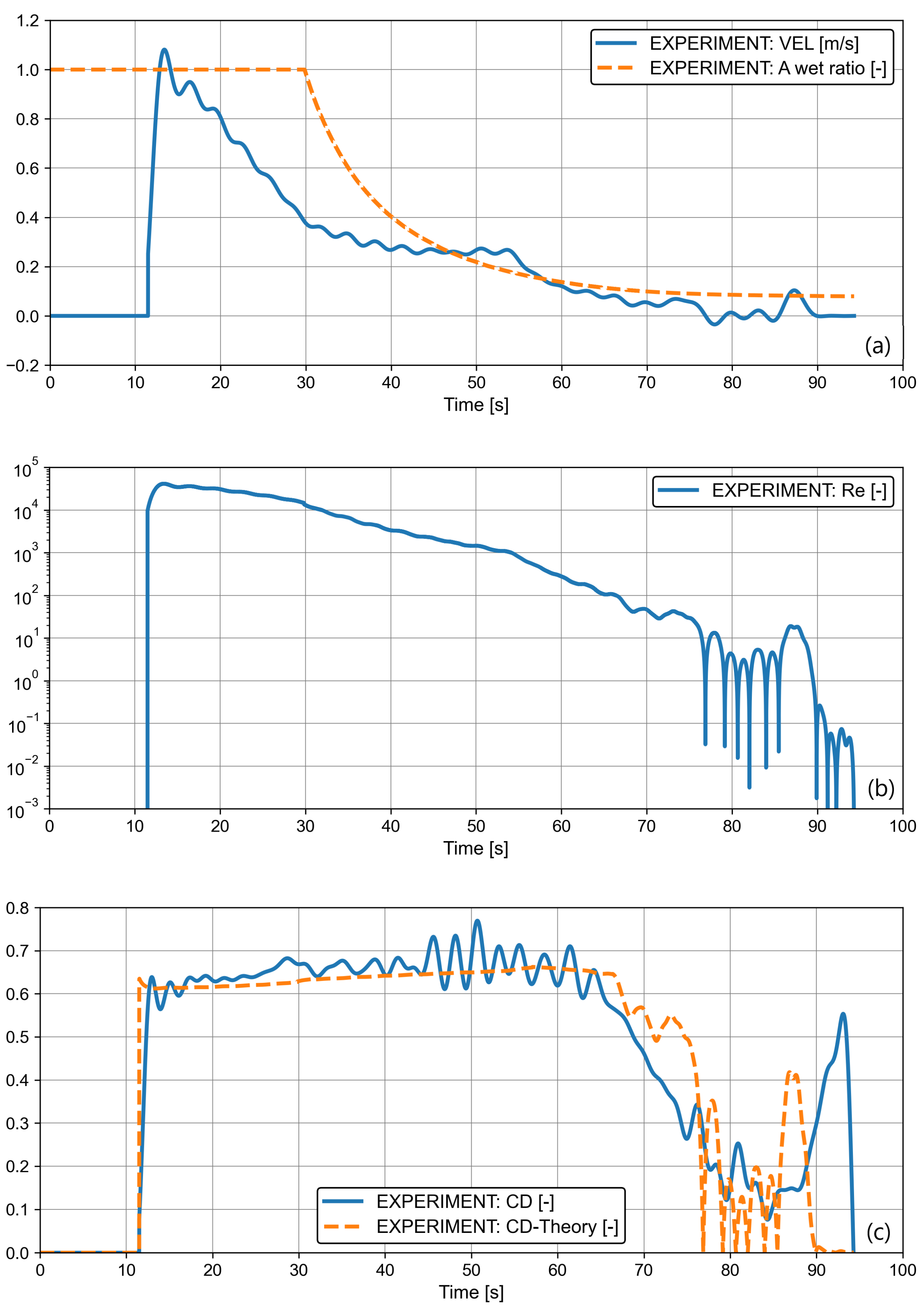
were calculated. The results are shown in
Figure 4.
As observed, the
coefficient for the orifice flow in the model experiment varies with the Reynolds number. Based on data found in reference [
7], a set of equations is derived to capture the Reynolds dependent discharge through an orifice—see Equation (
13). These equations are implemented in the UIF/TOR solver to provide a convenient user option avoiding any further discussion on, e.g., scale effects. A fair correlation is observed between the measured and theoretical
from Equation (
13).
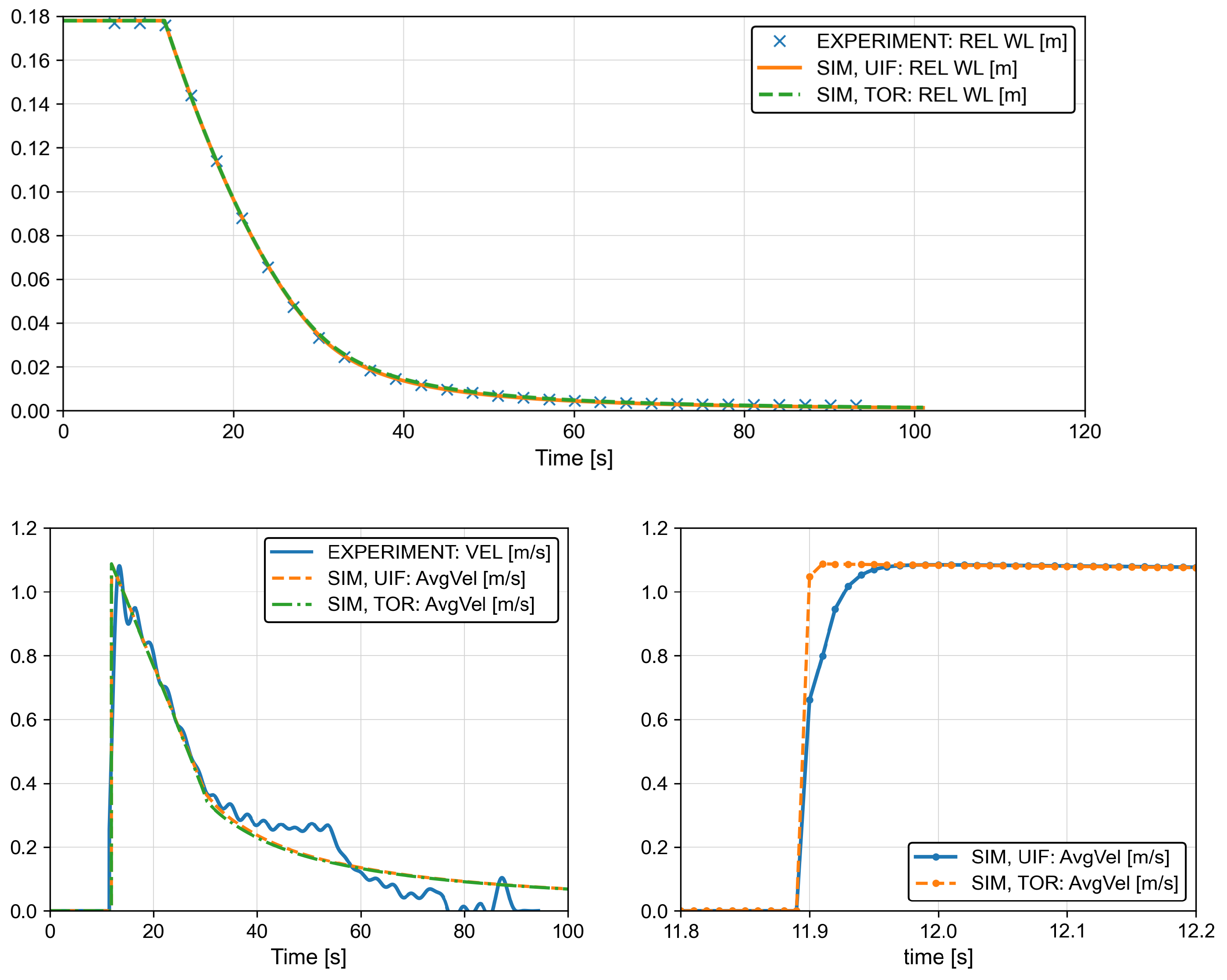
In
Figure 5, the comparison is shown between the experiments and the UIF and TOR simulations. In both simulations, the Reynolds-dependent discharge coefficient was used. The numerical results compare very well to the experiment. In the UIF model, the discharge velocity builds-up over time, demonstrating the effect of fluid inertia. In the TOR model, the maximum velocity is obtained at the second time step, and not at the first time step, due to Equation (
13).
The UIF model demonstrates a more physical start-up phase of the flow, but the steady velocity is quickly reached and there is hardly any benefit from the UIF model compared to the TOR model. This single-tank discharge experiment can be well captured by both models. It would require a more detailed and accurate experiment to conclude if the inertia start-up effect is well captured by the UIF model. The Re dependency in the orifice flow is, however, clearly demonstrated and confirmed by theory.
3.2. A Two Compartment Down-Flooding Experiment
Within the EU FLARE project, a two-compartment down-flooding experiment was conducted with the configuration shown in
Figure 6. The draft of the setup was 400 mm, measured from the inner bottom of the lower compartment. An air pipe with a diameter of 50 mm was used to vent the compartments. In each compartment, wave probes were positioned close to the corners to measure the water level, as indicated in the setup. The experimental data can be found at
http://shipstab.org/index.php/data-access (accessed on 26 April 2023).
A ComFLOW simulation of the down-flooding experiment was performed. ComFLOW is a Cartesian (cut cell) grid-based Volume of Fluid CFD solver, using a staggered finite-volume discretisation of the Navier-Stokes equations [
8]. Automatic grid refinement is used by means of a surface and object tracking criterion. Assuming fully vented compartments, the ComFLOW simulations were executed in single-phase mode, solving only the computational cells which contained liquid.
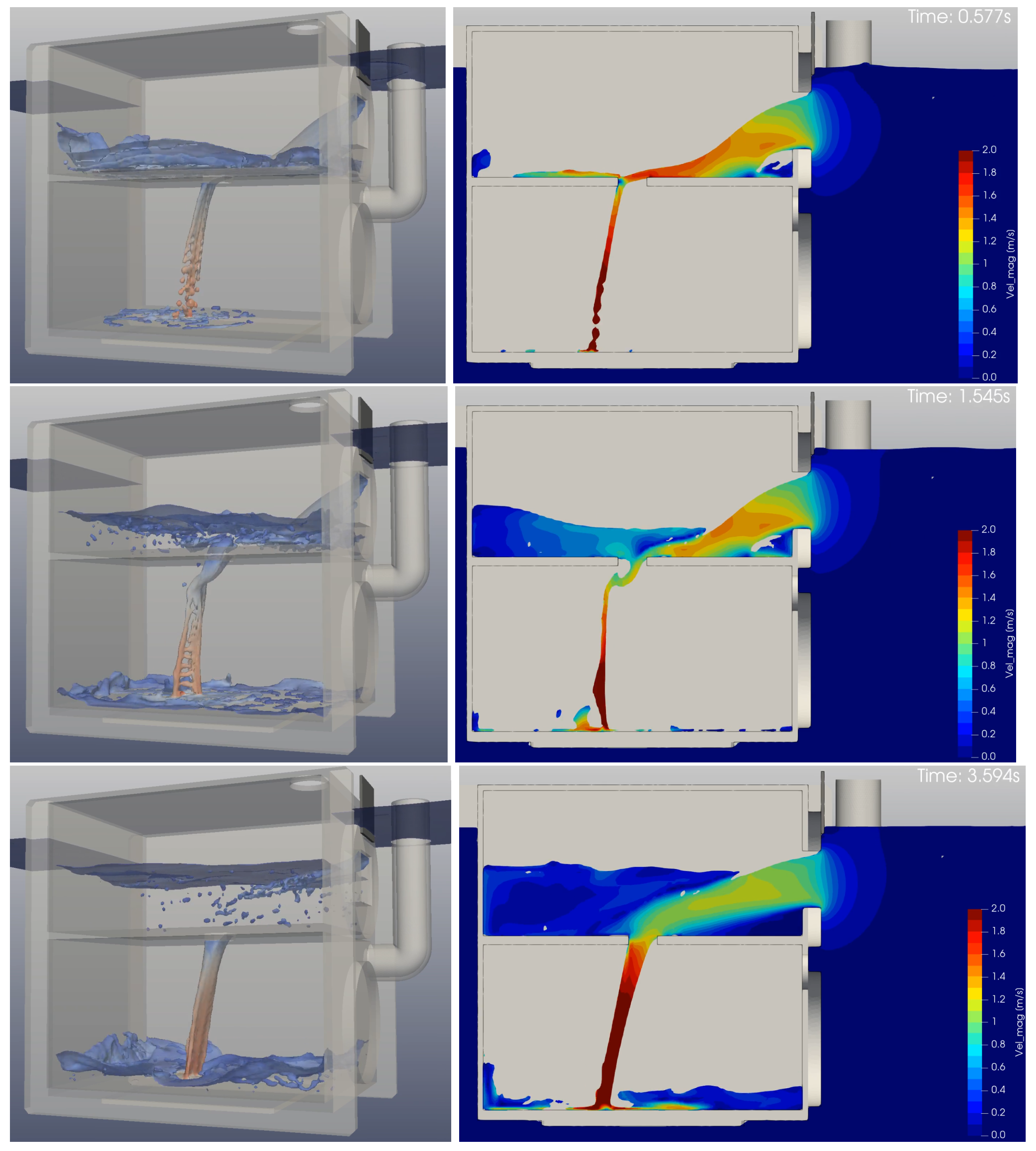
Several visualisations of the compartment filling level and flow velocities, as obtained by ComFLOW, are shown in
Figure 7. The 2D snapshots are taken in the middle of the breach. A clear fluid jet is observed to start at the breach and hit the deck just around the opening. This effects the flow velocity through the downflood opening. The free surface in the upper compartment shows significant spatial height variations at the start of the flooding. Near the end of the simulation, the vent pipe fills with water, and some oscillations are observed in the free surface level in the pipe. The snapshots demonstrate that, while the experimental setup perhaps looks simple, the flow pattern is far from simple. Obviously, most of the (local) details cannot be captured by the UIF or TOR model, in which each compartment is modelled as a single cell with an assumed horizontal free surface.
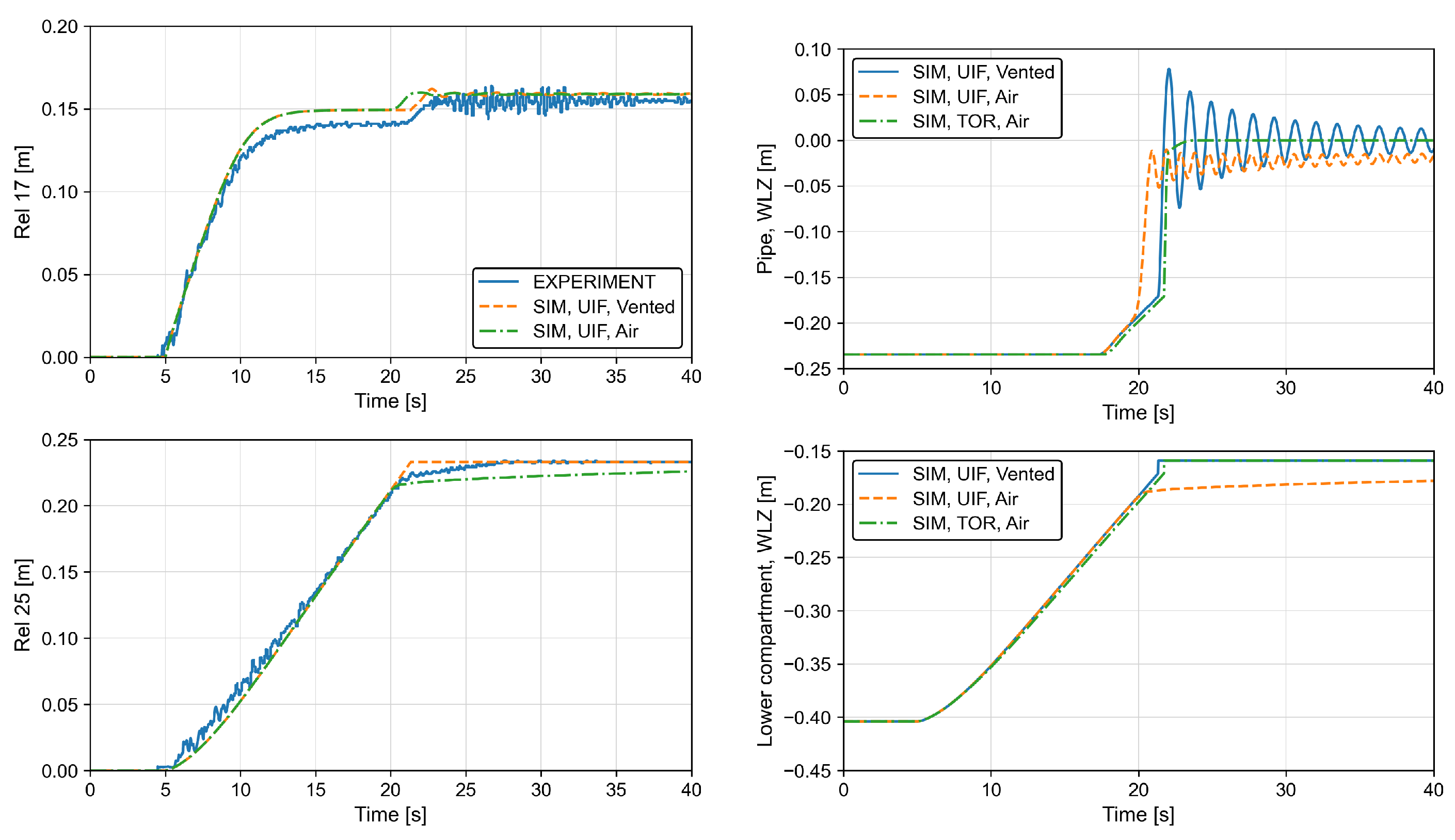
In
Figure 8, the measured water height in the upper compartment (Rel 17) and in the lower compartment (Rel 25) are shown. The ComFLOW results compare very well to the experimental data, and similar free surface oscillations on the wave probes are found as measured. The TOR and UIF results are obtained using a calibrated discharge coefficient of 0.80 for the downflood opening. The TOR model then gives a very good prediction of the water level in both compartments. Using the UIF model, the correlation to the experiments in the upper compartment is slightly less good. There is a small increase in the water level compared to the experimental data, which points to the inflow velocity being too high at the breach. This is attributed to the connected node and requires further study in future research. The calibrated discharge coefficient of 0.80 in the downflood opening is higher than expected, but can be explained based on the CFD visualisation. As such, CFD simulations provide valuable detailed flow information that are difficult to obtain from physical experiments.
In
Figure 9, measured water heights are compared to simulation results that account for air entrapment. To obtain stable simulations, the time step is reduced by a factor 100 in the UIF model. As a consequence, the calculation time increases from 30 s to about 30 min for 50 s simulation time. Using the TOR model, the time step could be kept the same for stable simulations. Using the UIF model, an oscillating free surface in the pipe is obtained. Similar oscillations were seen in the ComFLOW result. The TOR model predicts an equilibrium without any overshoot. The flooding of both compartments is similar with or without the air modelling. The only difference is the slightly slower filling of the lower compartment when air is temporarily entrapped near complete filling. The model does allow for air bubbles to escape through an opening that is fully wet on one side only. That is the case here, since the air entrapment is on top of the fluid in the lower compartment. Thus, the UIF model eventually allows for the bottom compartment to fill up completely. This effect is seen as well in the experiments and CFD results shown in
Figure 9, but at a much quicker rate, perhaps initiated by the fluid disturbances.
Overall, it is concluded that the air modelling for this configuration does not play an important role and that the vent openings were sufficiently large to obtain a fully vented condition. In vented conditions, the simulations are about twice as quick as real time, although the time step could be set even larger to further speed up the simulation time had the small diameter pipe not been part of the model.
3.3. Behaviour of an Oscillating Water Column (OWC) for Wave Energy Harvesting
The oscillating water column (OWC) is one possible system to harvest wave energy. In [
4,
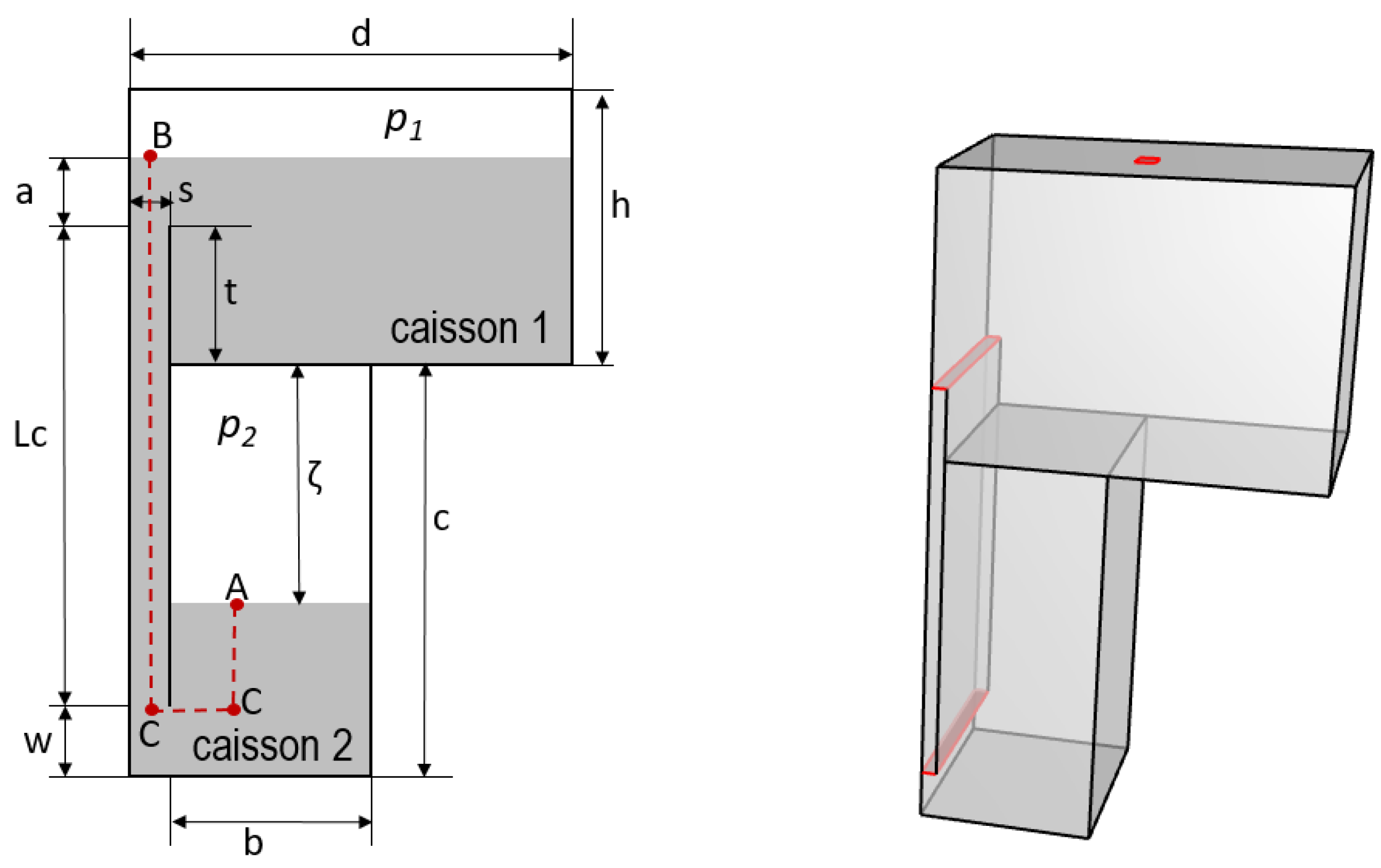
5], results are presented from a small-scale experimental device, denoted as REWEC1 (REsonant sea Wave Energy Converter, solution 1). A 2D sketch of the cross section of the configuration is shown in
Figure 10. It is essentially a U-tube. The width of the experimental setup is not provided. The 3D configuration used for the analysis in the present paper is given in
Figure 10 as well. The width was set to 0.5 m. The other dimensions were Lc = 0.85 m, b = 0.366 m, c = 0.797 m, d = 0.797 m, s = 0.032 m, t = 0.153 m, w = 0.1 m, and h = 0.60 m. The setup consisted of three cells: caisson-1, caisson-2, and the duct. There were two connecting openings and one air vent opening in caisson-1. Mass conservation in the system dictates that
.
The upper caisson is used in order to simulate the REWEC1 submergence, and it is used to initiate the starting condition in the experiment. Each caisson is equipped with a valve to close or open the tank to the atmosphere. At the start, the valve of the lower caisson is closed and water is put into the upper caisson so that the lower caisson is partly filled with an air pocket under pressure. Additional air is then pumped into the lower caisson until the desired resting condition is achieved with regard to atmospheric pressure in caisson-1. Then, the valve of the upper caisson is closed and air is pumped inside it, leading to and a further increased pressure in caisson-2. When the valve in caisson-1 is then opened, the pressure in this caisson drops to atmospheric pressure and the free damped harmonic oscillation can occur, converging, in the end, to the equilibrium resting condition. The diameter of the upper valve in caisson-1 is 0.5 inch. Construction details, such as wall thickness of the pipe connecting both caissons and the pipe opening geometry, are not known. Sharp-crested duct openings are, therefore, assumed.
In [
5], an analytical model is presented for the system behaviour based on the unsteady Bernoulli equation with the assumed streamline, as indicated in
Figure 10. The unsteady term is integrated in two parts: A-to-C and C-to-B. This leads to a non-linear equation, which is linearised to obtain the expression for the undamped natural period of the system:
where
is the heat capacity ratio. The other symbols in Equation (
14) refer to the drawing shown in
Figure 10. The subscript 0 denotes the equilibrium resting condition. As observed in Equation (
14), the heat capacity ratio
changes the stiffness of the system by a factor
and, thus, the natural frequency by a factor
. The term between square brackets represents the pressure of the air pocket in caisson-2; hence, this pressure affects the natural period. In the UIF simulations, the heat capacity ratio
is used; in the experiments, an adiabatic behaviour is assumed, with
.
Out of the four given cases given in [
4], case C was randomly selected. The experimental conditions are specified in
Table 1. First, the resting condition was verified by specifying the pressure in caisson-2,
, and
, and by introducing an open vent to the atmosphere in caisson-1. To obtain an equilibrium pressure of 1077 Pa in caisson-2, the fluid level in caisson-1 had to be set to
m, while the reported value in the experiments was
m. Using the reported fluid level, the equilibrium condition was reached at
Pa, which is a difference of only 0.5% compared to the reported value. The fluid level in caisson-2 was then
m. Hence, it is most likely the pressure reading that has the least accuracy.
The dynamic simulation was started using the non-equilibrium condition specified in the experiment—see
Table 1. The dynamic simulation result is shown in
Figure 11. The natural period in the simulation is 1.22 s, versus 1.0 s in the experiment. This difference is mainly caused by the difference in heat capacity ratio. The major energy losses in the system seem to come from the internal pipe openings, since this is the only damping accounted for in the UIF model, assuming sharp-edged orifice discharge coefficients, as per Equation (
13). The main difference in the setup is that the simulations required a slightly larger vent opening to obtain the rapid decrease in the pressure in caisson-1 and the oscillations as presented. The present results are obtained using a vent opening diameter of 1.8 inch. Using a vent with 0.5 inch diameter leads to a slow decay. This requires some further investigation of the UIF modelling. Zero energy loss on the vent opening was assumed.
The end condition in the dynamic simulation is shown in
Figure 12. The results are reported in
Table 1. Both the UIF and the TOR model predict the same equilibrium end condition, but the dynamics in the system are only captured by the UIF model. As observed, the final fluid level in caisson-1 is 0.028 m higher than the starting value, while it is 0.028 m lower in the experiment. The pressure in the simulation matches the experimental value. This is most likely a reporting issue, since there is no mass conservation in the reported experimental fluid levels either.
The overall finding is that the UIF model captures the behaviour of the OWC system well. At model scale, the system behaves according to an adiabatic system. At full scale, an isothermal process is considered more likely, and this is what is modelled in the UIF solver. If so, the natural period of the full-scale system can be well predicted. The damping decay rate can be well predicted using the loss of energy at the internal openings. The steady Bernoulli equation model variant (TOR) rightfully predicts the equilibrium resting condition, but, as expected, it cannot predict the dynamic system behaviour.
3.4. Flooding of a Cruise Ship in Calm Water Conditions
Within the EU FLARE project, MARIN conducted model tests using a 1:60 scale model of a large cruise ship, as shown in
Figure 13. The model tests’ data are available at
http://shipstab.org/index.php/data-access (accessed on 26 April 2023). This concerns an unbuilt large cruise ship (about 95,900 GT), with lines and internal arrangement provided by Chantiers de l’Atlantique to the consortium. The hull lines, the internal subdivisions used in the model tests, and various experimental results can be found in [
2]. This reference presents the results of an international benchmark study conducted within the EU FLARE project, showing numerical results of various time domain codes developed for dynamic shipflooding simulations.
The overall length of the ship is about 300 m, with a breadth of 35.2 m. For the model tests, the deepest subdivision draught of 8.20 m was selected, in conjunction with three-compartment damage. The length of this damage is beyond regulations, for the purpose of creating complex and critical damage. It extends from about 134 m to about 180 m forward from APP. According to present regulation, the smallest allowed metacentric height (GM) for this draught is 3.50 m, but for the purpose of the model tests, a lower GM of 2.36 m was selected.
The six-dof XMF time-domain simulations utilized the impulse–response functions calculated from the intact ship hydrodynamics database, obtained from MARIN’s 3D panel code SEACAL. The KG was set to 17.45 m to obtain the GM of 2.36 m. The time-varyied hydrostatics and wave loads were calculated on the actual wetted hull of the ship given by the 3D geometry of the ship. Calculations were performed at full scale with a time step of 0.1 s.
The internal subdivision of the damage spans vertically over six decks, up to 20.16 m above base. In the simulation model, all internal compartments are modelled as built on model scale, including the bulkhead and deck thickness of 24 cm (4 mm on model scale). The volume of door-openings in bulkheads is added as an extension to one of the adjacent compartments. The total volume of the intact ship below the water line is 164,300 m3; the volume of the floodable compartments amounts to 48,012 m3.
The floodable space on the lowest deck is shown in
Figure 14. Two watertight bulkheads divide the space into three separate compartments that span the width of the ship. Each compartment is subdivided at logical points where the cross section of the tank changes significantly. This results in three tanks along the width of the ship, as shown in
Figure 14. Water level probes used in the model experiment are indicated by the Rel keyword. The aft compartment extends over deck 1 and 2 without an intermediate deck. The ship damage is created on starboard side.
Following the floodwater path from the breached starboard side to the intact port side, the fluid goes through a sudden contraction and expansion due to the narrow centreline tanks. The energy losses are different than for an orifice in a bulkhead. The resistance coefficients used are those associated with typical pipe flows with a sudden contraction or expansion of the pipe diameter (see e.g., reference [
7]). For a sudden expansion, the Borda–Carnot energy loss equation (
) with empirical loss coefficient
is used, with resistance coefficient:
This amounts to a
coefficient of about 0.70 to 0.80 for the lower compartments. The simulations are, therefore, carried out with a value of 0.75 for the deck 1 openings, as seen in
Figure 14. For all other openings, including the side breach in the ship, Equation (
13) is applied.
The viscous roll damping of the ship is captured by linear and quadratic damping coefficients. The coefficients are tuned to match the free roll decay experiment, as shown in
Figure 15. The bilge keel length on the intact side is about 90 m; on the damaged side, it measured 45 m, as it is removed around the external breach opening. The roll radius of gyration was tuned to match the roll period at the start of the decay, resulting in
m. During the flooding experiments, a horizontal four mooring-line soft-mooring arrangement was used, which was included in the numerical setup as well. Linear and quadratic sway and yaw damping coefficients were tuned to match the sway and yaw decay experiment in calm water condition. These can be seen as low-frequency manoeuvring coefficients.
When the breach in the side is opened in calm water, the ship starts to roll towards the damage as the water egresses in, before reaching a final equilibrium condition. During this motion, the roll damping is expected to be much larger than in the intact condition, since multiple deck edges move through the water. The extent of damage is about 45 m, which is half the length of the intact bilge keels, and about five decks get submerged.
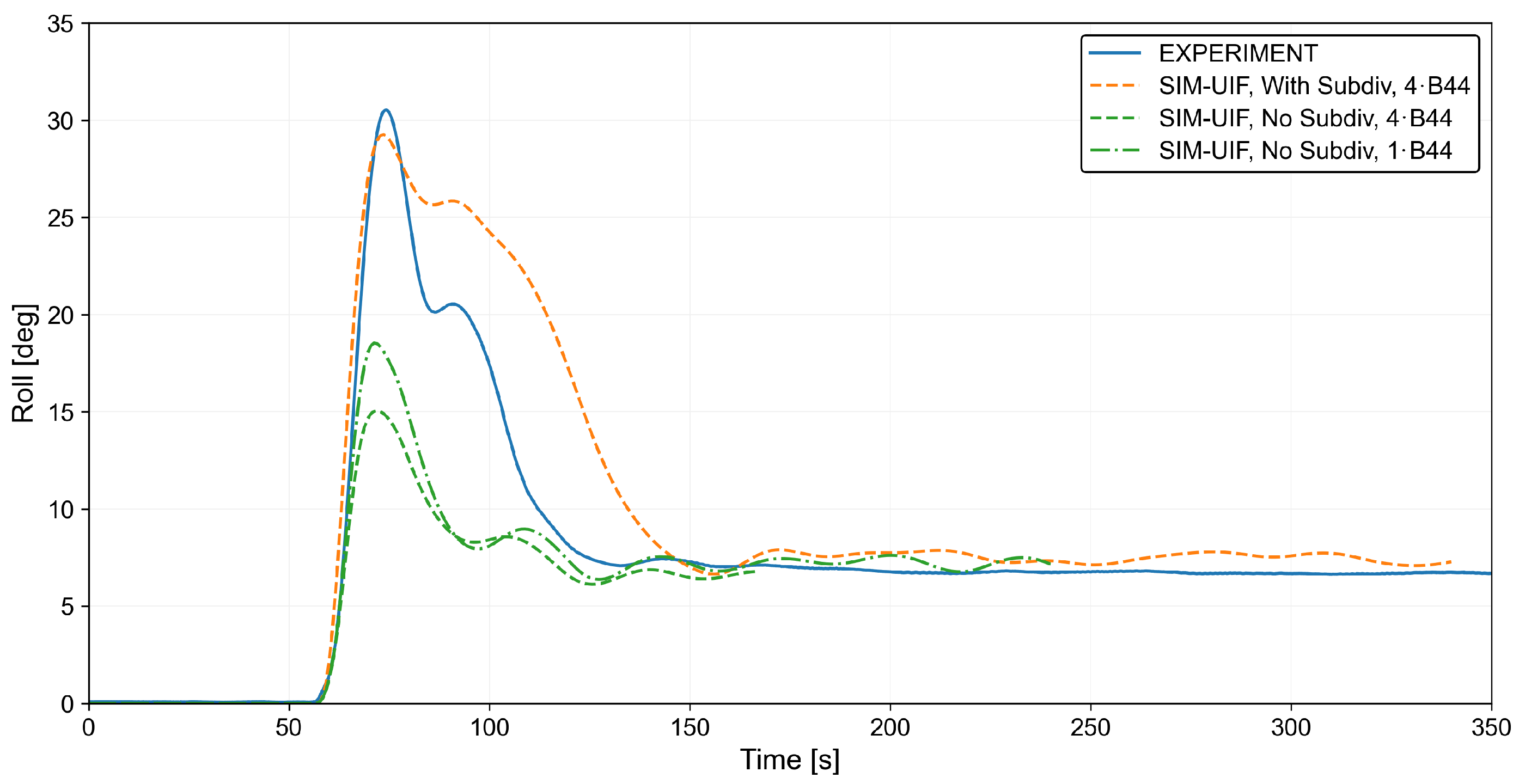
The roll response of the ship in calm water after breaching is shown in
Figure 16. In all three simulations, the UIF model was used. The ship response with the subdivision of deck 1 shows a good correlation to the experiment during the transient roll. To obtain this match, the intact roll damping coefficients (linear and quadratic) were multiplied by a factor four. The final equilibrium condition is rather well predicted. With less roll damping, the ship capsises during the first transient roll. The increase in the roll damping can be understood given the fact that multiple deck edges are dragged through the water, creating vortices and, thus, damping. The two simulation results without the deck 1 subdivision show a much lower roll response, demonstrating that using the intact roll damping for the damaged ship leads to a roll peak of about 19 deg. Using the calibrated roll damping in the damaged condition, the roll peak lowers to about 15 deg. This is about half the obtained roll response in the simulation with the subdivision on deck 1. The factors that thus contribute the most to the roll response peak are the amount of roll damping and the degree of subdivision on the lowest deck.
In [
2], simulation results of various simulation tools are shown for the present case as part of the international benchmark on flooding conducted in the FLARE project. The subdivision of deck 1 varies in the different tools following practices and rules as considered most applicable by the user. A common approach is that some kind of subdivision is required to develop sufficient roll. There is no information on the applied roll damping. The final equilibrium condition is often well captured, but the transient response differs in accuracy compared to the experiment.
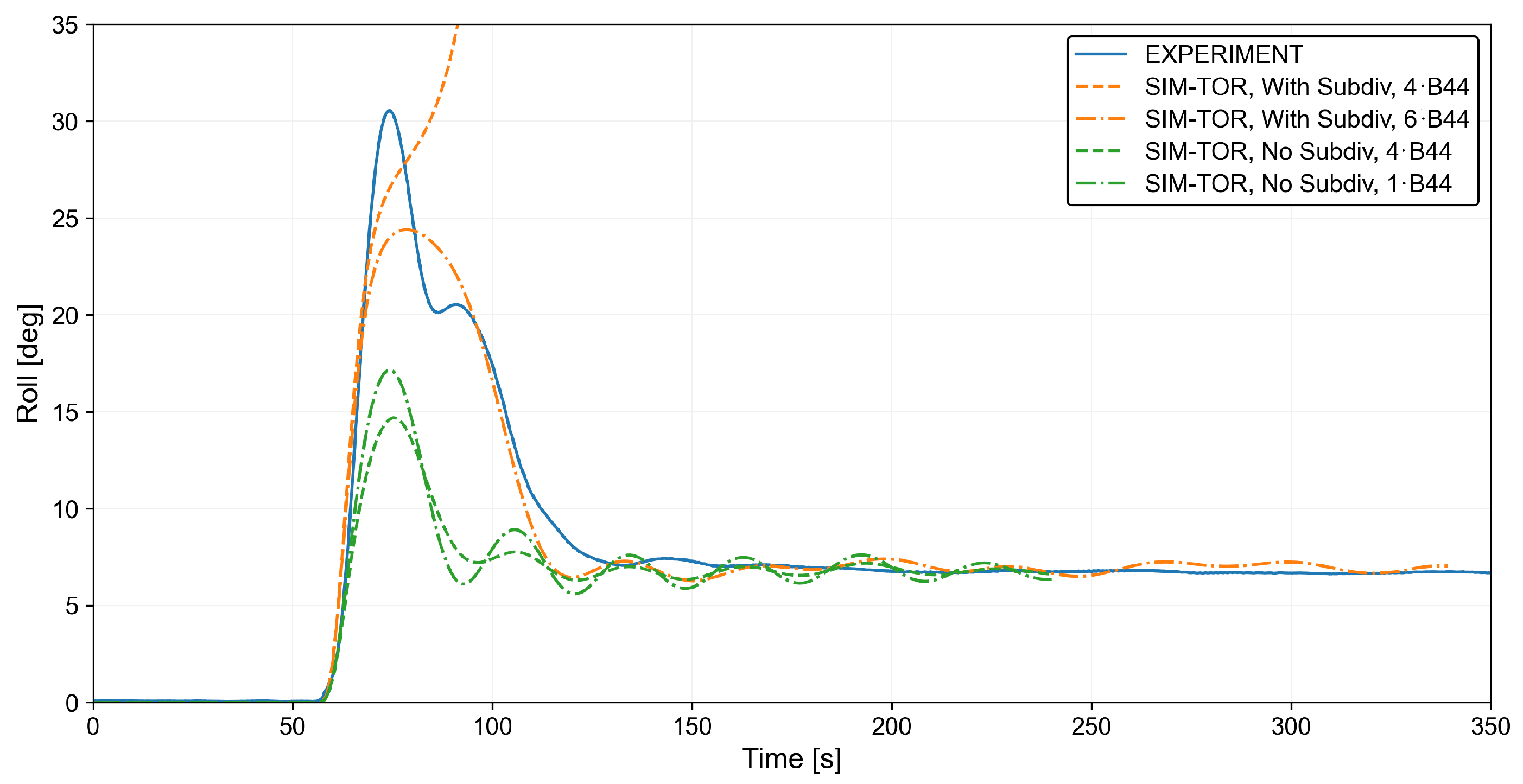
The simulation results for the TOR model are shown in
Figure 17. Using the subdivision on deck 1, the ship capsises when the TOR model is applied with the calibrated roll damping for the UIF model. Using roll damping coefficients six times higher than the intact roll damping, the ship survives the first transient roll, but the roll response character is different than in the UIF simulation. Without any subdivision on deck 1, the roll response is much smaller but, in that case, comparable to the UIF simulation results for the same internal configuration.
The present example shows some of the challenges to obtain an accurate prediction of the transient shipflooding response for large damages utilizing the Bernoulli equation. The flow inertia aspects captured by the unsteady UIF model lead to a better correlation with the experimental results compared to the steady TOR model. The UIF model is considered an interesting step forward for dynamic stability simulations when fluid inertia is relevant during the transient flooding phase. Still, the UIF model only approximates the real fluid behaviour. As demonstrated in reference [
2], an accurate prediction of the transient ship roll response is far from trivial for any simulation tool. User experience is important to define a proper internal subdivision and model setup, but if that experience is gained e.g., through model test experiences as discussed, realistic (transient) flooding simulations can be achieved. As such, the Bernoulli-based simulation tools can provide viable insights in dynamic ship stability.
The main factors of influence in the presented case are the internal subdivision layout on deck 1 and the roll damping coefficients, which capture the roll damping physics of appendages and the external damage extent. The roll damping of damaged ships was investigated in the FLARE project and the main findings were reported in [
9]. One of the conclusions was that the damping depends as well on the ship draught and heel, complicating the roll damping prediction for damaged ships even further. Hence, further research on the topic is required.
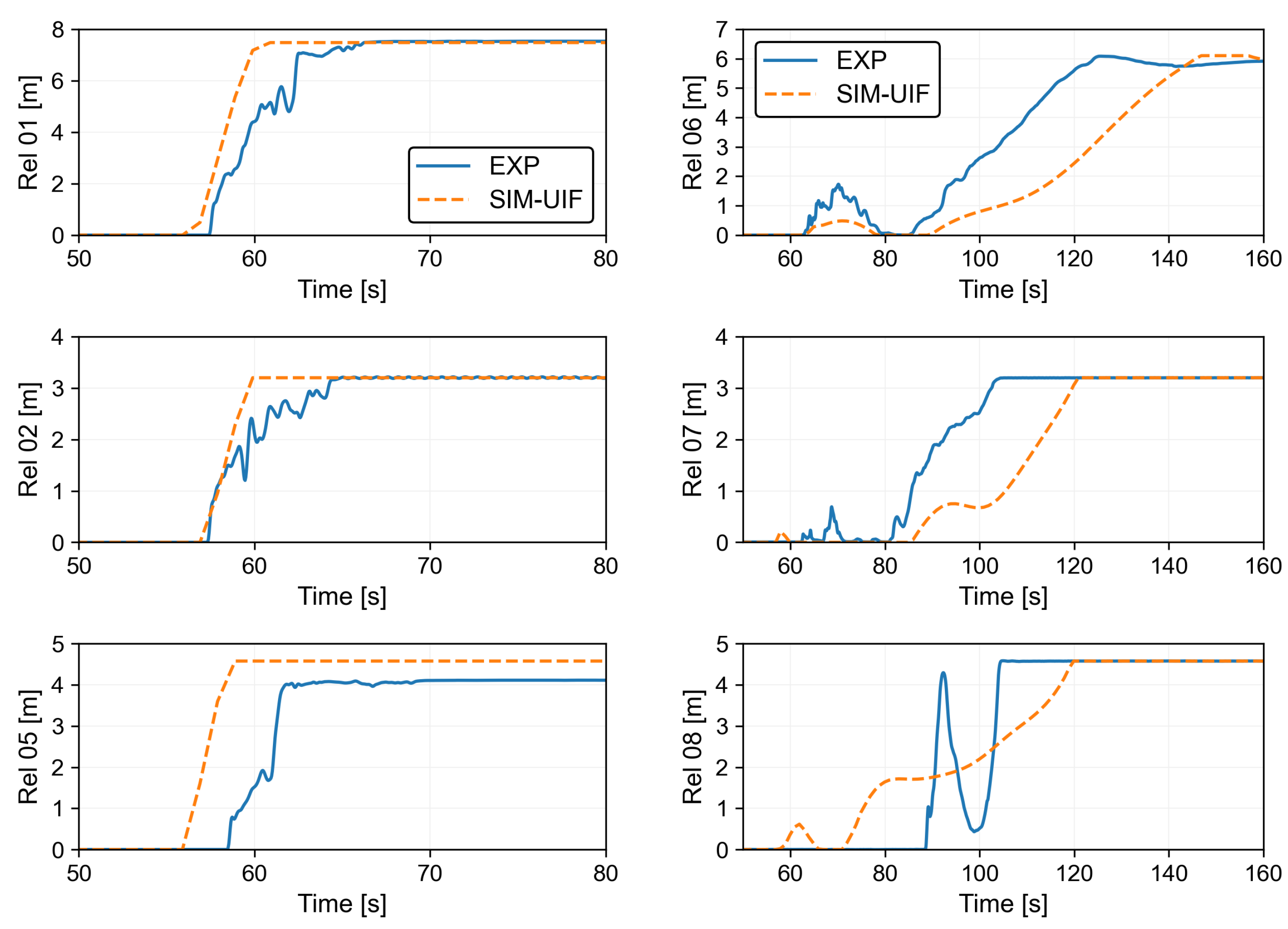
A comparison of the water levels in the compartments on deck 1 is shown in
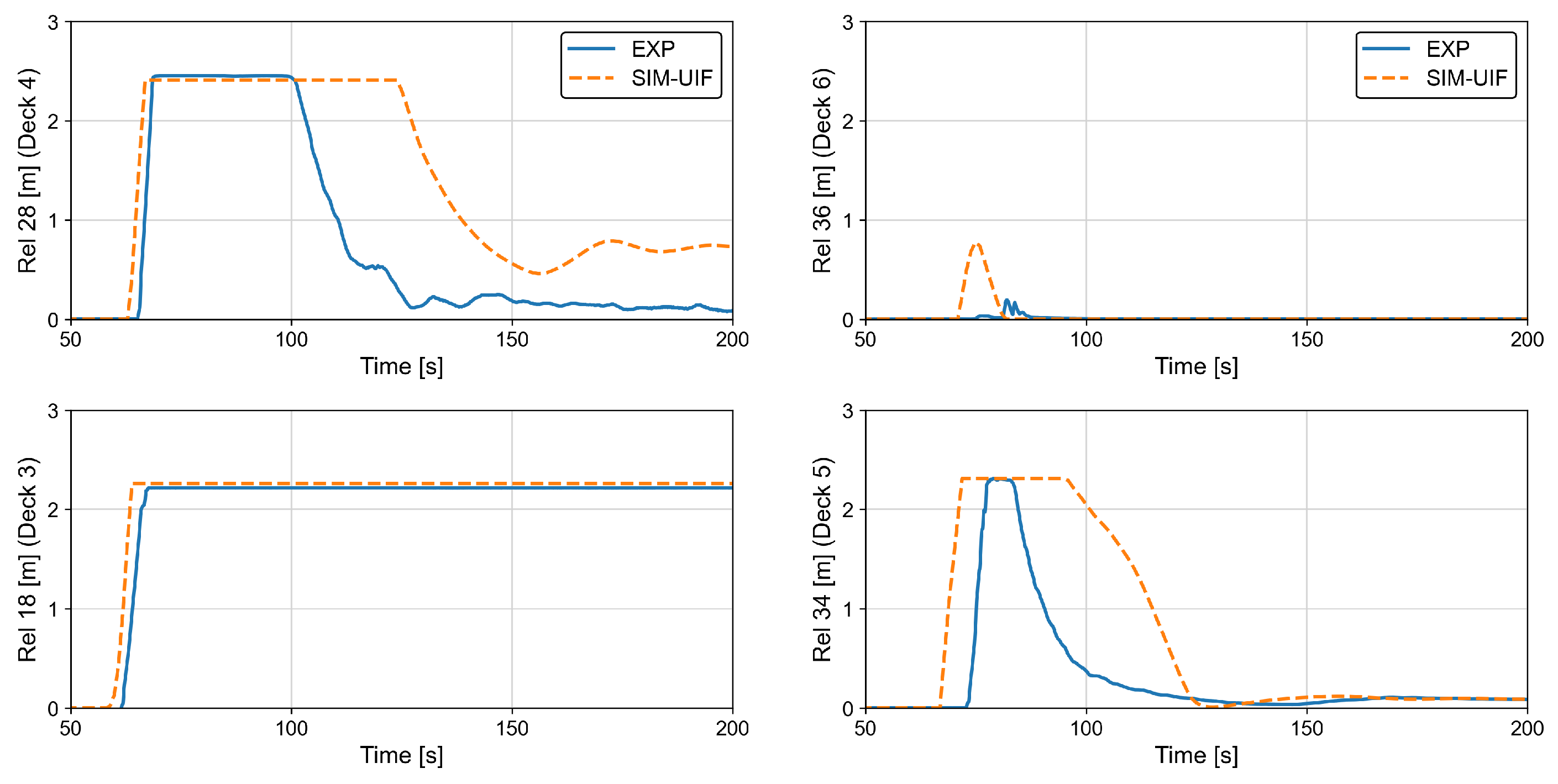
Figure 18. The compartments on the breached side (ref. REL 1, 2, and 5) rapidly flood at a similar speed to the experiment, but the timing is slightly different. Most likely, there are significant 3D flow effects in the compartment so that the water is unevenly distributed in the compartment. This cannot be captured without further subdivision, which is an interesting research point for future work. On the other hand, once the ship has survived the transient flooding stage, the subdivision on deck 1 is considered less relevant in the progressive flooding phase. The compartments on the intact side (ref. REL 6, 7, and 8) flood in a more complicated manner, which is rather well captured in the aft (Rel 6) and centre (Rel 7) breached compartments, but less good in the most forward compartment (Rel 8). The calculated water level on decks 3, 4, 5, and 6 near the breached side show a fair correlation to the measurements, as shown in
Figure 19.
From the results in this section, it is concluded that the global motions and transient flooding of the compartments of the damaged ship can be well captured by the UIF model, given a realistic subdivision of the ship and use of appropriate discharge resistance coefficients. Our simulations show that the roll damping of the damaged ship is important during transient flooding phase and that the roll damping is higher than for the intact ship. The numerical roll damping was tuned against model test experiments, a tuning that might depend on the damage extent, given the reasoning in this section. After the initial transient flooding, the ship might be exposed to progressive flooding in waves with potentially a large amount of flood water on board. The importance of the roll damping during progressive flooding remains a point of research. It is finally concluded that the steady TOR model can rightfully predict the final flooding condition of the ship in calm water, but that the transient response is predicted less accurately compared to the UIF model using the same level of subdivision.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}