
Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea

 ,
,  ,
,
Abstract
:1. Introduction
2. Methodology and Design Procedure
2.1. Methodology
2.1.1. Time Domain Motion Equation
2.1.2. Weibull Distribution
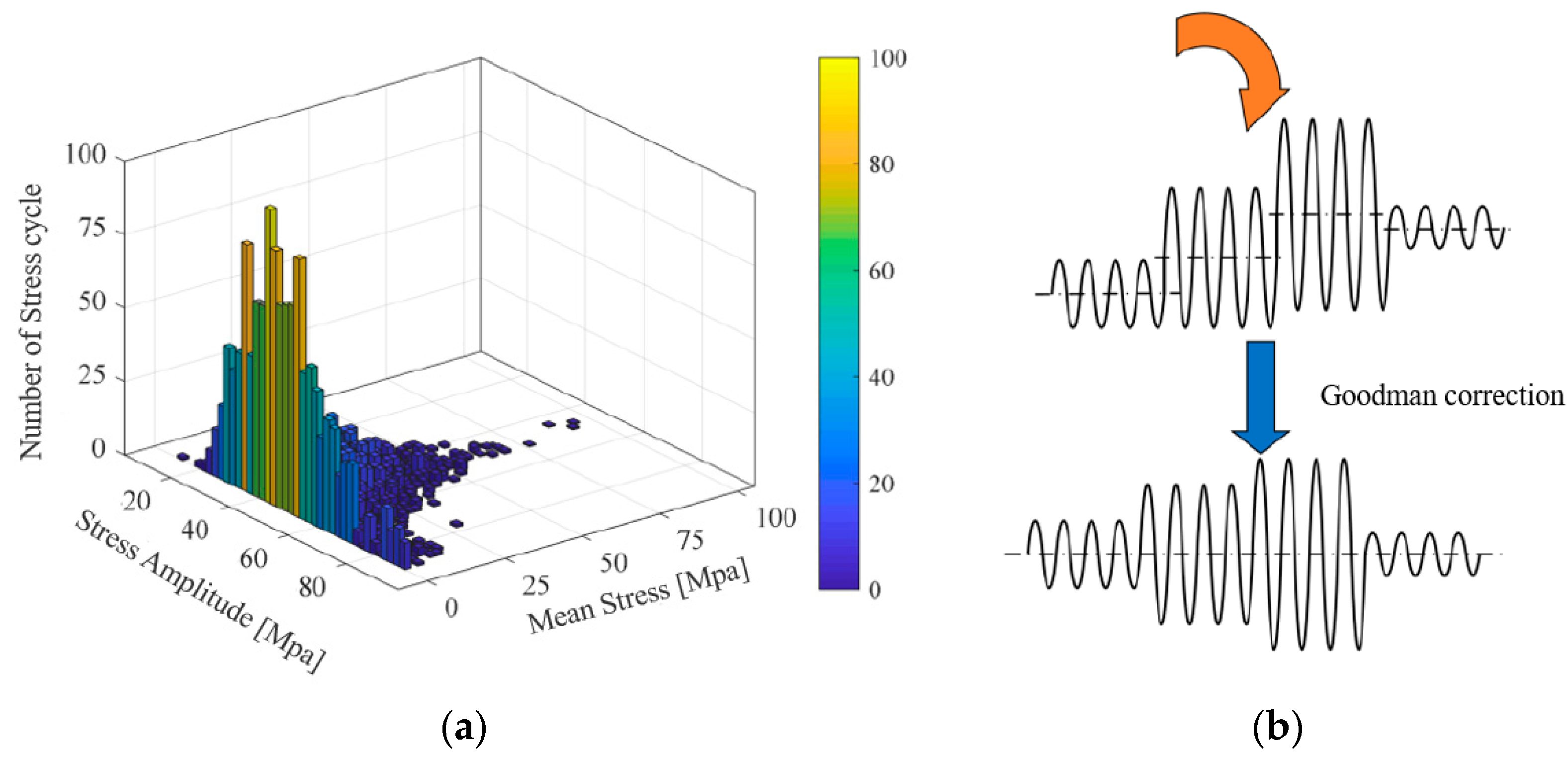
2.1.3. Rain Flow Counting Method and Goodman Correction
2.1.4. Linear Fatigue Cumulative Damage Rule
2.2. Design Procedure
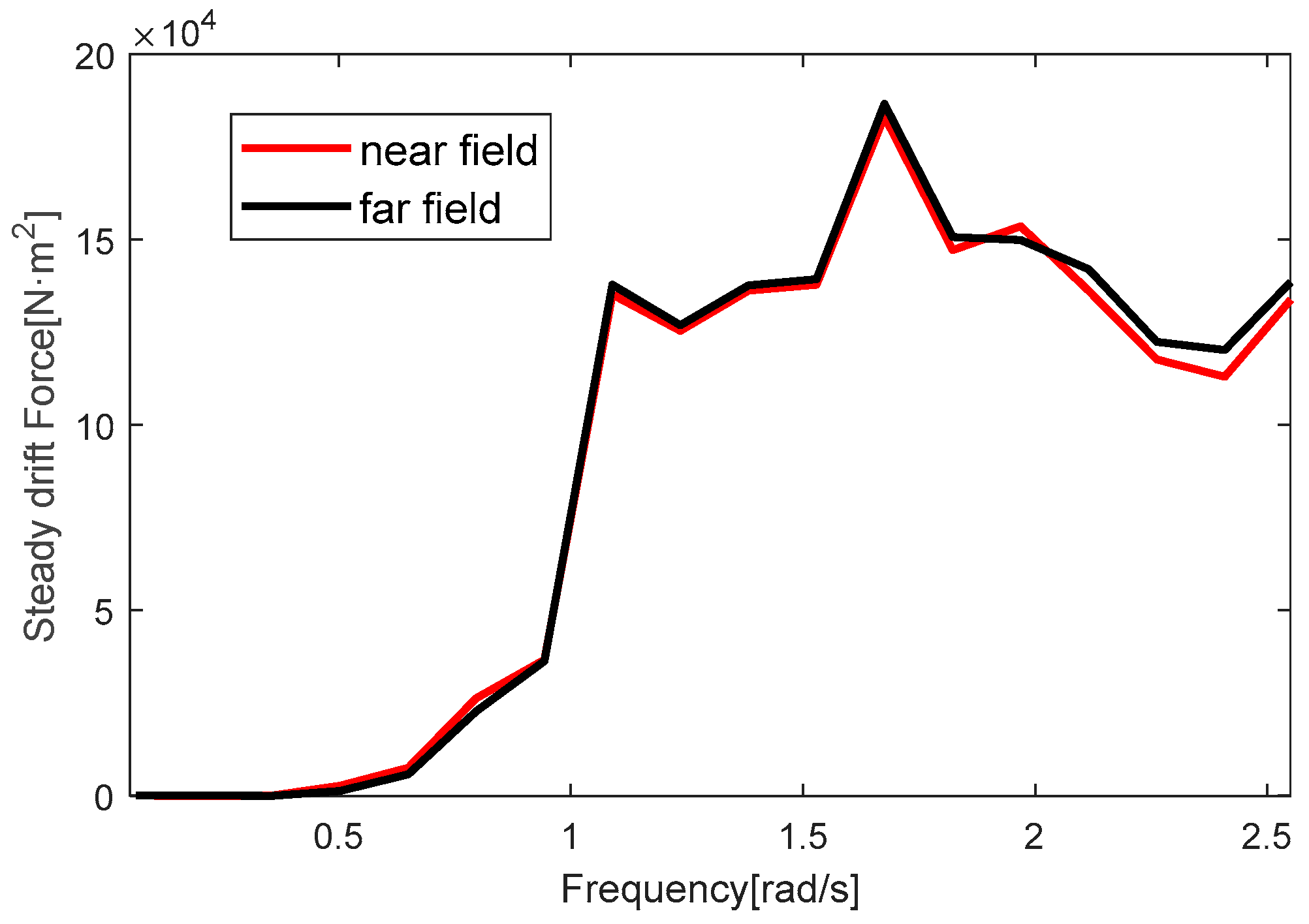
3. Numerical Model and Hydrodynamic Coefficient Verification
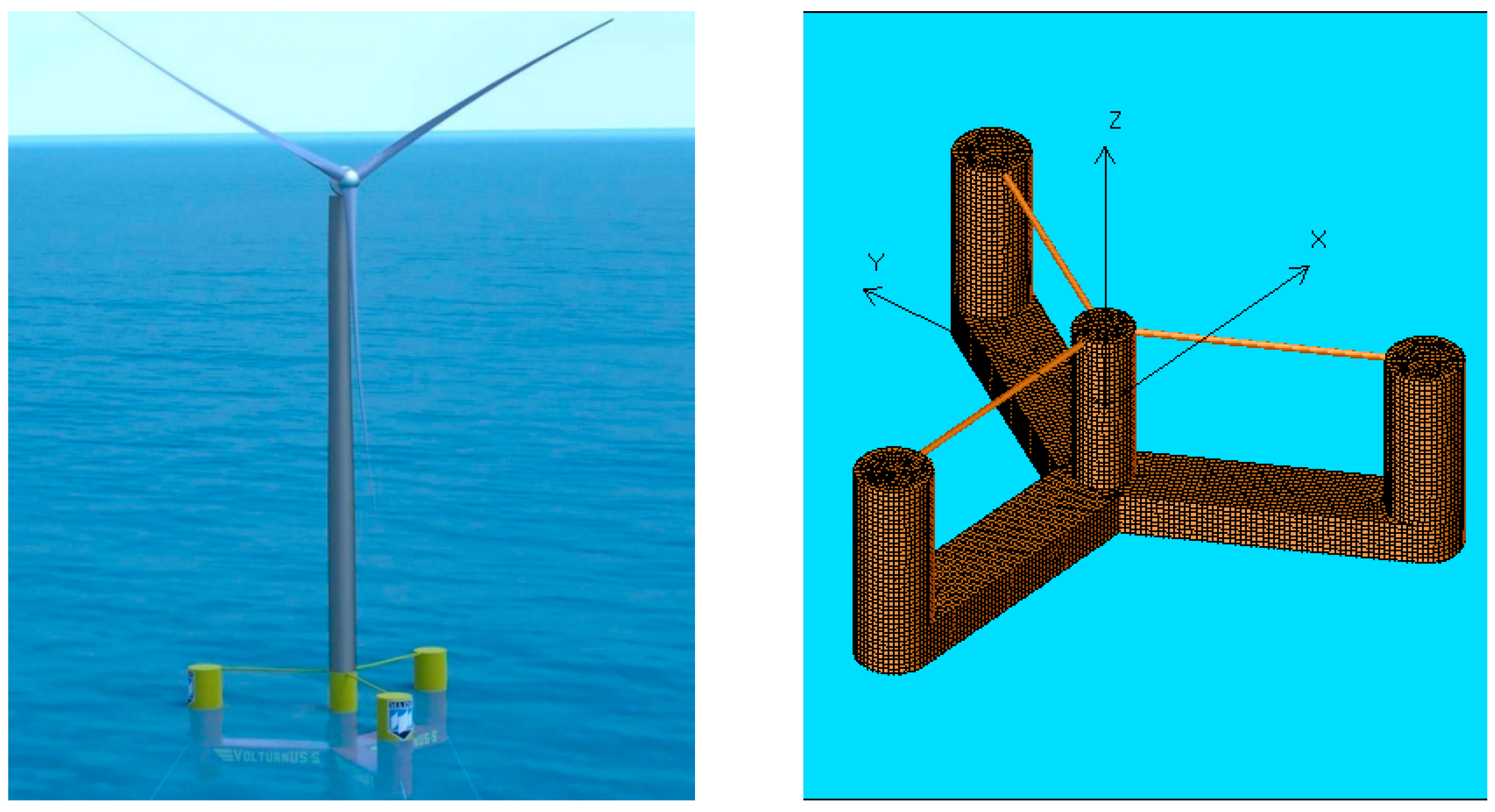
3.1. Turbine and Platform Characteristics
3.2. Initial Mooring Design
4. Mooring Design and Optimization
4.1. Environmental Condition
4.2. Optimization Based on Mooring Maximum Breaking Limit and Fatigue Damage
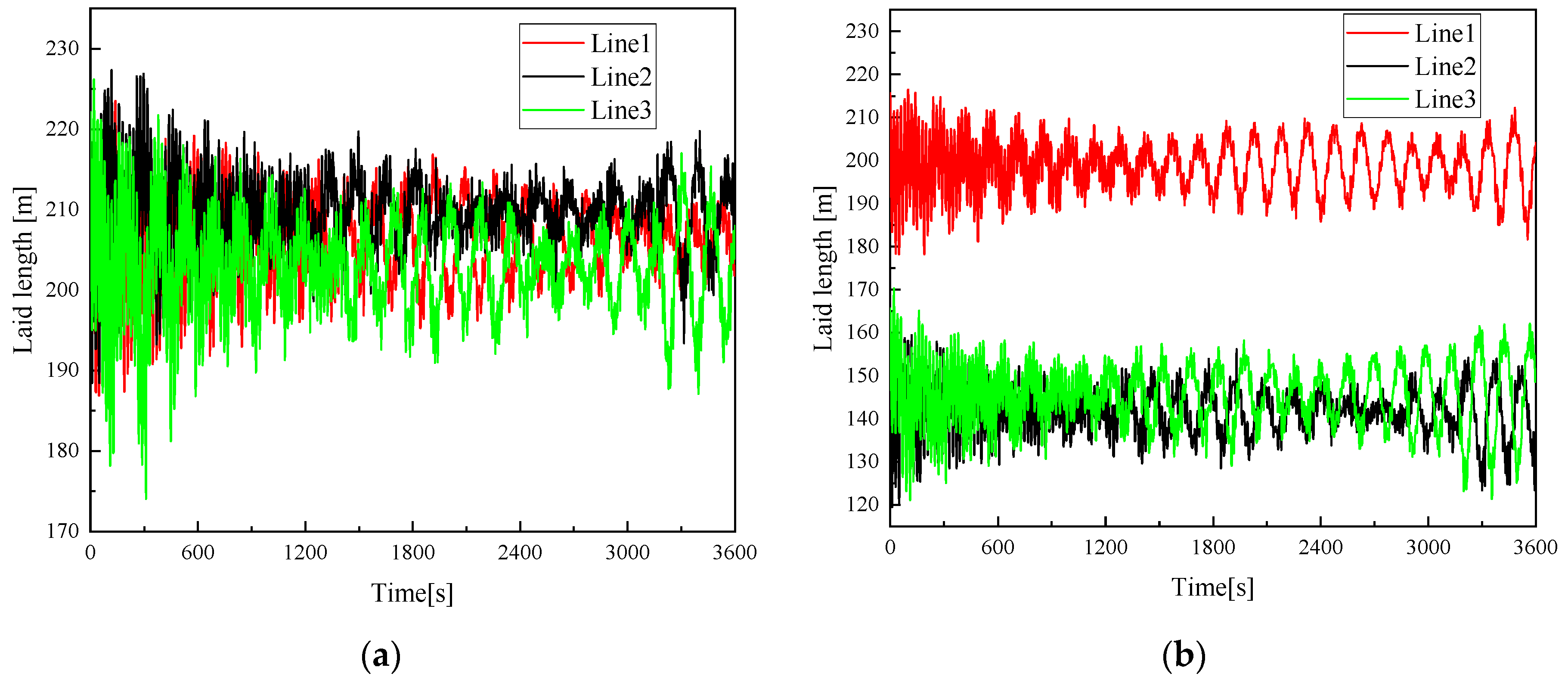
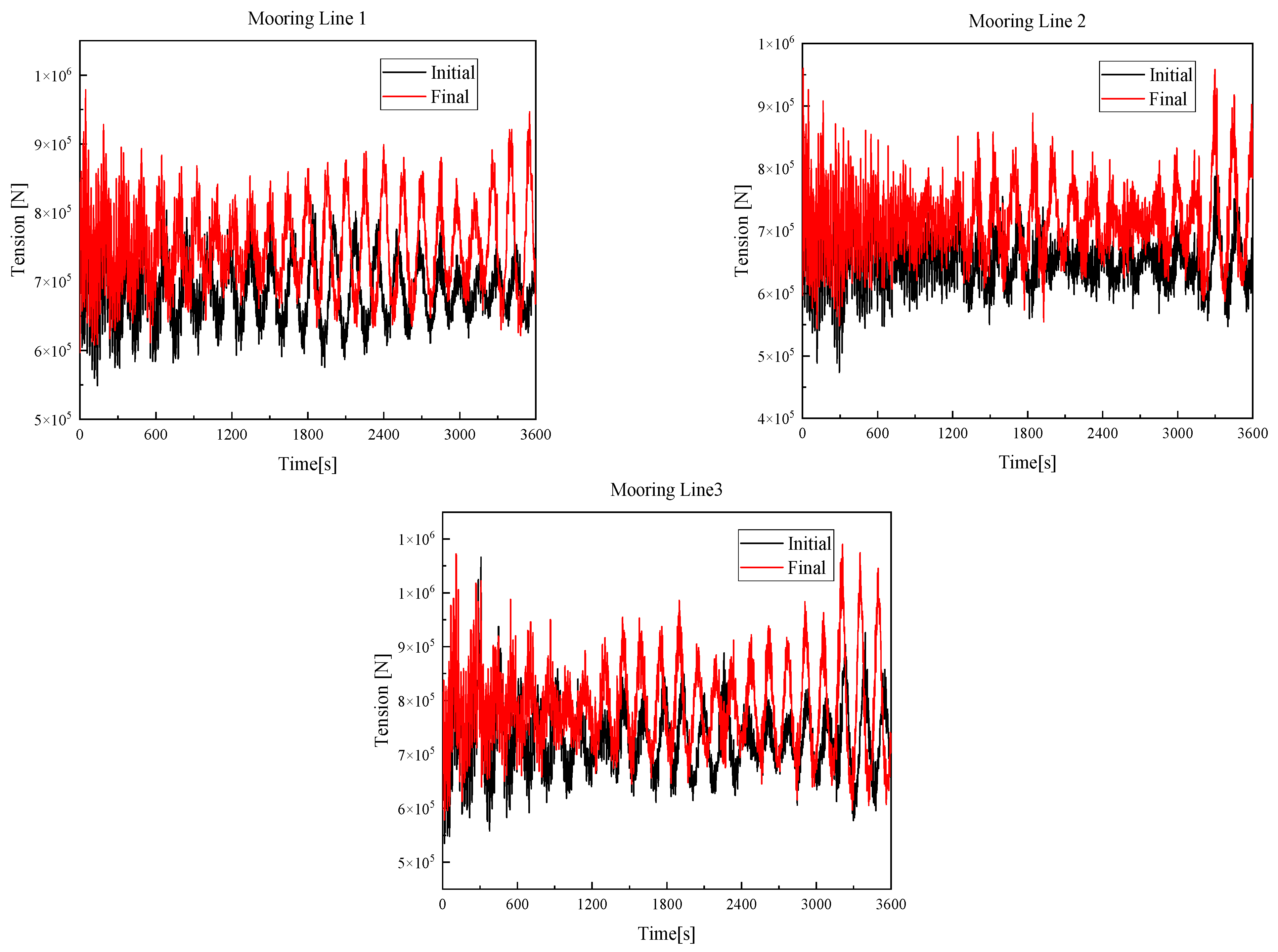
4.3. Mooring Optimization—Anchor Point
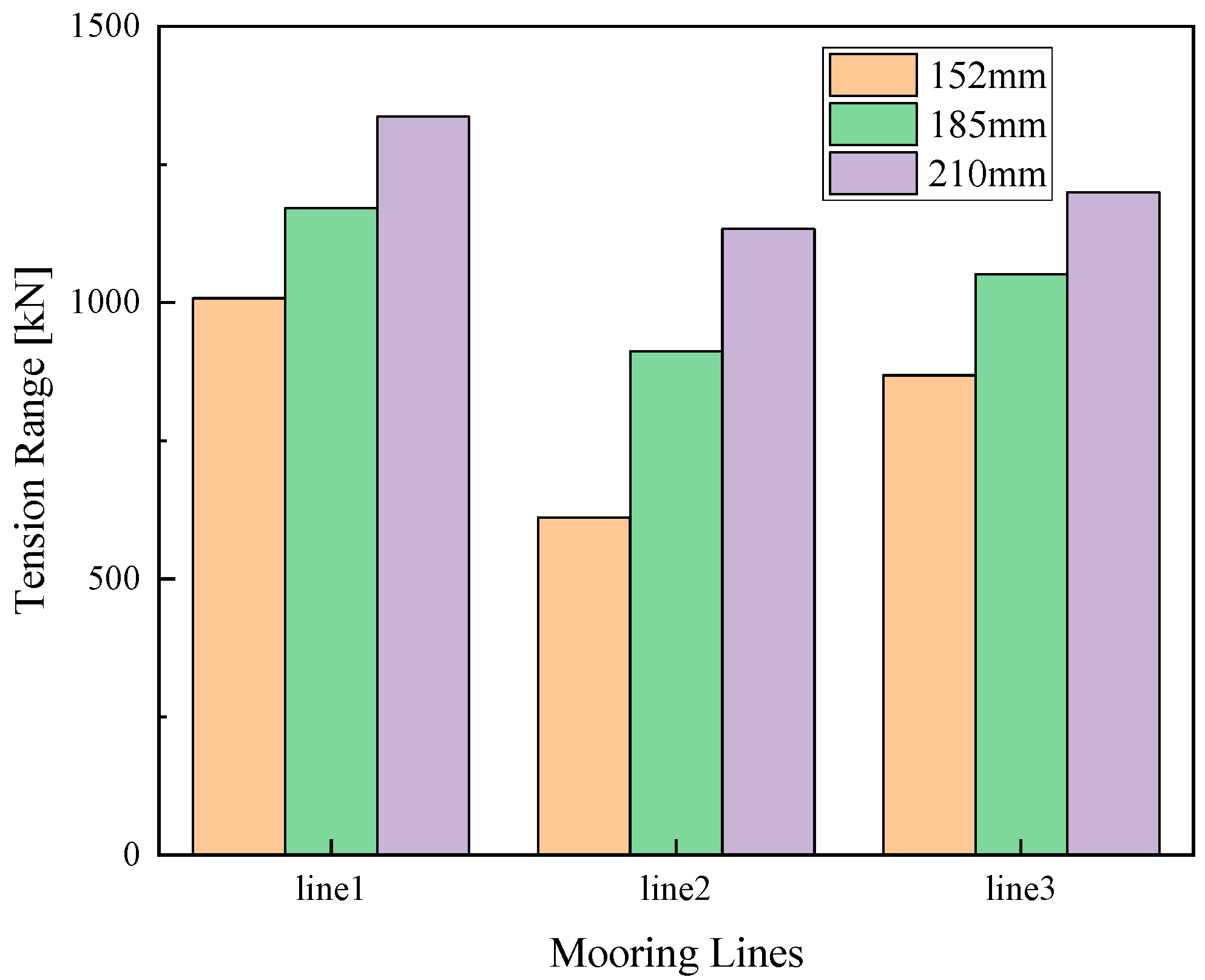
4.4. Mooring Optimization—Nominal Diameter
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Report 2023. Available online: https://gwec.net/globalwindreport2023/ (accessed on 15 July 2023).
- Lantz, E.; Wiser, R.; Hand, M. IEA Wind Task 26 the Past and Future Cost of Wind Energy; Technical Report; National Renewable Energy Lab.(NREL): Golden, CO, USA, 2012. [Google Scholar]
- Chen, M.; Li, C.B.; Lee, J. A Simulation Technique for Monitoring the Real-time Stress Responses of Various Mooring Configurations for Offshore Floating Wind Turbines. Ocean. Eng. 2023, 278, 114366. [Google Scholar] [CrossRef]
- Barrera, C.; Battistella, T.; Guanche, R.; Losada, I.J. Mooring system fatigue analysis of a floating offshore wind turbine. Ocean. Eng. 2020, 195, 106670. [Google Scholar] [CrossRef]
- Li, C.B.; Choung, J. Fatigue damage analysis for a floating offshore wind turbine mooring line using the artificial neural network approach. Ships Offshore Struct. 2017, 12, 288–295. [Google Scholar] [CrossRef]
- Wang, Z.; Qiao, D.; Yan, J.; Tang, G.; Li, B.; Ning, D. A new approach to predict dynamic mooring tension using LSTM neural network based on responses of floating structure. Ocean. Eng. 2022, 249, 110905. [Google Scholar] [CrossRef]
- Campanile, A.; Piscopo, V.; Scamardella, A. Mooring design and selection for floating offshore wind turbines on intermediate and deep water depths. Ocean. Eng. 2018, 148, 349–360. [Google Scholar] [CrossRef]
- Hall, M.; Goupee, A. Validation of a lumped-mass mooring line model with DeepCwind semisubmersible model test data. Ocean. Eng. 2015, 104, 590–603. [Google Scholar] [CrossRef]
- Pillai, A.C.; Gordelier, T.J.; Thies, P.R.; Dormenval, C.; Wray, B.; Parkinson, R.; Johanning, L. Anchor loads for shallow water mooring of a 15 MW floating wind turbine—Part I: Chain catenary moorings for single and shared anchor scenarios. Ocean. Eng. 2022, 266, 111816. [Google Scholar] [CrossRef]
- Pillai, A.C.; Gordelier, T.J.; Thies, P.R.; Cuthill, D.; Johanning, L. Anchor loads for shallow water mooring of a 15 MW floating wind turbine—Part II: Synthetic and novel mooring systems. Ocean. Eng. 2022, 266, 112619. [Google Scholar] [CrossRef]
- Xu, S.; Soares, C.G. Guedes Soares. Experimental investigation on short-term fatigue damage of slack and hybrid mooring for wave energy converters. Ocean Eng. 2019, 195, 106618. [Google Scholar] [CrossRef]
- Ahn, H.; Ha, Y.-J.; Kim, K.-H. Load Evaluation for Tower Design of Large Floating Offshore Wind Turbine System According to Wave Conditions. Energies 2023, 16, 1862. [Google Scholar] [CrossRef]
- Zhao, G.; Zhao, Y.; Dong, S. System reliability analysis of mooring system for floating offshore wind turbine based on environmental contour approach. Ocean. Eng. 2023, 285, 115157. [Google Scholar] [CrossRef]
- Ding, W.-W.; Jiang, J.-Q.; Yue, W.-Z.; Li, Y.-Z.; Wang, W.-S.; Sheng, S.-W.; Chen, M. Numerical Study on Hydrodynamic Performance of a New Semi-Submersible Aquaculture Platform. Appl. Sci. 2023, 13, 12652. [Google Scholar] [CrossRef]
- Trubat, P.; Molins, C.; Gironella, X. Wave hydrodynamic forces over mooring lines on floating offshore wind turbines. Ocean. Eng. 2020, 195, 106730. [Google Scholar] [CrossRef]
- Chueh, C.-J.; Chien, C.-H.; Lin, C.; Lin, T.-Y.; Chiang, M.-H. Dynamic Co-Simulation Analysis and Control of an IEA 15MW Offshore Floating Semi-Submersible Wind Turbine under Offshore Wind-Farm Conditions of Wind and Wave. J. Mar. Sci. Eng. 2023, 11, 173. [Google Scholar] [CrossRef]
- Mazarakos, T.P. Wind Energy Calculations of a 15 MW Floating Wind Turbine System in the Mediterranean Sea. Environ. Sci. Proc. 2023, 26, 191. [Google Scholar] [CrossRef]
- Benassai, G.; Campanile, A.; Piscopo, V.; Scamardella, A. Mooring control of semi-submersible structures for wind turbines. Procedia Eng. 2014, 70, 132–141. [Google Scholar] [CrossRef]
- Chen, M.; Zhou, H.; Li, C.B. Fully Coupled Dynamic Analysis of the OO-STAR Floating Wind Turbine in Different Water Depths. In Proceedings of the 2022 ISOPE International Ocean and Polar Engineering Conference, Shanghai, China, 6–10 June 2022. [Google Scholar]
- Kim, H.; Jeon, G.-Y.; Choung, J. A Study on Mooring System Design of Floating Offshore Wind Turbine in Jeju Offshore Area. Int. J. Ocean. Syst. Eng. 2013, 3, 209–217. [Google Scholar] [CrossRef]
- Li, C.B.; Chen, M.; Choung, J. The Quasi-Static Response of Moored Floating Structures Based on Minimization of Mechanical Energy. J. Mar. Sci. Eng. 2021, 9, 960. [Google Scholar] [CrossRef]
- ANSYS Inc. ANSYS AQWA Theory Manual; ANSYS Inc.: Canonsburg, PA, USA, 2023. [Google Scholar]
- Zhao, Y.; Liao, Z.; Dong, S. Estimation of characteristic extreme response for mooring system in a complex ocean environment. Ocean. Eng. 2021, 225, 108809. [Google Scholar] [CrossRef]
- Kebir, T.; Correia, J.; Benguediab, M.; Jesus, A.M.P.D. Numerical study of fatigue damage under random loading using rainflow cycle counting. Int. J. Struct. Integr. 2021, 12, 149–162. [Google Scholar] [CrossRef]
- Yang, Y.; Bashir, M.; Wang, J.; Michailides, C.; Loughney, S.; Armin, M.; Hernández, S.; Urbano, J.; Li, C. Wind-wave coupling effects on the fatigue damage of tendons for a 10 MW multi-body floating wind turbine. Ocean. Eng. 2020, 217, 107909. [Google Scholar] [CrossRef]
- Milne, I.; Ritchie, R.O.; Karihaloo, B.L. (Eds.) Comprehensive Structural Integrity: Cyclic Loading and Fatigue. Elsevier: Amsterdam, The Netherlands, 2003; Volume 4. [Google Scholar]
- Low, Y.M. Extending a time/frequency domain hybrid method for riser fatigue analysis. Appl. Ocean. Res. 2011, 33, 79–87. [Google Scholar] [CrossRef]
- Du, J.; Wang, H.; Wang, S.; Song, X.; Wang, J.; Chang, A. Fatigue damage assessment of mooring lines under the effect of wave climate change and marine corrosion. Ocean. Eng. 2020, 206, 107303. [Google Scholar] [CrossRef]
- Gaertner, E.; Rinker, J.; Sethuraman, L.; Zahle, F.; Anderson, B.; Barter, G.; Abbas, N.; Meng, F.; Bortolotti, P.; Skrzypinski, W.; et al. Definition of the IEA Wind 15-Megsestt Offshore Reference Wind Turbine. 2020, Technical Report. Available online: https://www.nrel.gov/docs/fy20osti/75698.pdf (accessed on 15 July 2023).
- Allen, C.; Viscelli, A.; Dagher, H.; Goupee, A.; Gaertner, E.; Abbas, N.; Hall, M.; Barter, G. Definition of the UMaine VolturnUS-S Reference Platform Developed for the IEA Wind 15Megawatt Offshore Reference Wind Turbine; 2020 Technical Report; National Renewable Energy Lab.(NREL): Golden, CO, USA, 2020. [Google Scholar]
- DNV. Offshore Standard DNV_OS_E301, Position Mooring; DNV: Bærum, Norway, 2010. [Google Scholar]
- Hazelton, M. Blyth Offshore Demonstration Project Phase 2—Supporting Environmental Information Blyth Offshore Demonstrator Phase 2 Works 1 Document Control, 2020, Technical Report, EDF Renewables. Available online: https://www.edf-re.uk/ (accessed on 18 December 2023).
- Connolly, P.; Hall, M. Comparison of pilot-scale floating offshore wind farms with shared moorings. Ocean. Eng. 2019, 171, 172–180. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, H.; Lian, J. Review of integrated installation technologies for offshore wind turbines: Current progress and future development trends. Energy Convers. Manag. 2022, 255, 115319. [Google Scholar] [CrossRef]
- Hsu, W.-T.; Thiagarajan, K.P.; Manuel, L. Extreme mooring tensions due to snap loads on a floating offshore wind turbine system. Mar. Struct. 2017, 55, 182–199. [Google Scholar] [CrossRef]
- Chen, M.; Ouyang, M.; Li, T.; Zou, M.; Ye, J.; Tian, X. Numerical modelling of a catamaran float-over deck installation for a spar platform with complex hydrodynamic interactions and mechanical couplings. Ocean. Eng. 2023, 287, 115905. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, L.; Dong, S.; Wu, L.; Li, Z.; Mou, L.; Wang, A. Wind wave characteristics and engineering environment of the South China Sea. J. Ocean. Univ. China 2014, 13, 893–900. [Google Scholar] [CrossRef]
- Chen, M.; Zou, M.; Zhu, L.; Ouyang, M.; Liang, Q.; Zhao, W. A Fully Coupled Time Domain Model Capturing Nonlinear Dynamics of Float-over Deck Installation. Available at SSRN 4583209. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=4583209 (accessed on 18 December 2023).
- Yan, X.; Chen, C.; Yin, G.; Ong, M.C.; Ma, Y.; Fan, T. Numerical investigations on nonlinear effects of catenary mooring systems for a 10-MW FOWT in shallow water. Ocean. Eng. 2023, 276, 114207. [Google Scholar] [CrossRef]
- Ghafari, H.; Dardel, M. Parametric study of catenary mooring system on the dynamic response of the semi-submersible platform. Ocean. Eng. 2018, 153, 319–332. [Google Scholar] [CrossRef]
- DNV-OS-E302; Offshore Mooring Chain. DNV: Bærum, Norway, 2022.
- ISO20438; Ships and Marine Technology—Offshore Mooring Chains. ISO International Standards: Geneva, Switzerland, 2018.
- Ma, K.-T.; Luo, Y.; Kwan, T.; Wu, Y. Mooring System Engineering for Offshore Structures; Gulf Professional Publishing: Houston, TX, USA, 2019. [Google Scholar]
- Chen, M.; Ren, W.; Xiao, P.; Zhu, L.; Li, F.; Sun, L. Numerical analysis of a floating semi-submersible wind turbine integrated with a point absorber wave energy convertor. In Proceedings of the Thirtieth International Ocean and Polar, Virtual, 11 October 2020. [Google Scholar]
- Chen, M.; Xiao, P.; Zhou, H.; Li, C.B.; Zhang, X. Fully Coupled Analysis of an Integrated Floating Wind-Wave Power Generation Platform in Operational Sea-States. Front. Energy Res. 2022, 10, 931057. [Google Scholar] [CrossRef]
- Liu, H.; Chen, M.; Han, Z.; Zhou, H.; Li, L. Feasibility Study of a Novel Open Ocean Aquaculture Ship Integrating with a Wind Turbine and an Internal Turret Mooring System. J. Mar. Sci. Eng. 2022, 10, 1729. [Google Scholar] [CrossRef]
- Harrold, M.J.; Thies, P.R.; Newsam, D.; Ferreira, C.B.; Johanning, L. Large-scale testing of a hydraulic non-linear mooring system for floating offshore wind turbines. Ocean. Eng. 2020, 206, 107386. [Google Scholar] [CrossRef]
- Xu, S.; Wang, S.; Soares, C.G. Experimental study of the influence of the rope material on mooring fatigue damage and point absorber response. Ocean. Eng. 2021, 232, 108667. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power | 15 MW |
| Rotor diameter | 240 m |
| Hub height | 150 m |
| Hub diameter | 6 m |
| Blade mass | 65.7 t |
| Rotor nacelle assembly mass | 1446 t |
| Tower mass | 1211 t |
| Tower diameter at base | 10 m |
| Cut-in, Rated, Cut-out Speed | 3 m/s, 10.59 m/s, 25 m/s |
| Cut-in, Cut-out speed | 4.6 rpm, 7.6 rpm |
| Parameter | Value |
|---|---|
| Hull displacement | 20.206 m3 |
| Hull steel mass | 3.914 t |
| Tower interface mass | 100 t |
| Draft | 20 m |
| Freeboard | 14 m |
| Vertical Center of Gravity form SWL | −14.94 m |
| Vertical Center of Buoyancy form SWL | −13.63 m |
| Roll Inertia about Center of Gravity | 1.251 × 1010 kg-m2 |
| Pitch Inertia about Center of Gravity | 1.251 × 1010 kg-m2 |
| Yaw Inertia about Center of Gravity | 2.367 × 1010 kg-m2 |
| Parameter | Value |
|---|---|
| Mooring System Type | Chain Catenary |
| Line Type | R3 Studless Mooring Chain |
| Number of Lines | 3 |
| Line Breaking Strength | 22,286 kN |
| Nominal Chain Diameter | 185 mm |
| Dry Line Linear Density | 685 kg/m |
| Extensional Stiffness | 3270 MN |
| Fairlead Pretension | 564 kN |
| Anchor Type | Gravity anchor |
| Anchor Weight | 20 t |
| Line | Anchor Coordinates | Line Length [m] | ||
|---|---|---|---|---|
| x [m] | y [m] | z [m] | ||
| 1 | −330 | 0 | −70 | 300.68 |
| 2 | 165 | 285.79 | −70 | 300.68 |
| 3 | 165 | −285.79 | −70 | 300.68 |
| Direction | 0° | 30° | 60° | 90° | 120° | 150° | 180° |
| Probability | 50% | 8.33% | 8.33% | 8.33% | 8.33% | 8.33% | 33.33% |
| Significant Wave Height | |||||
|---|---|---|---|---|---|
| 4.2 | 5.6 | 7 | 8.4 | 9.8 | |
| 0.5 | 4 | 25 | 10 | 4 | 0.6 |
| 1 | 2 | 13 | 9.5 | 2 | 1.2 |
| 1.5 | 6 | 7 | 2 | 0.2 | |
| 2 | 0.6 | 5.5 | 1 | 0.1 | |
| 2.5 | 2 | 2 | 0.1 | ||
| 3 | 0.5 | 1 | 0.05 | ||
| 3.5 | 0.45 | 0.05 | |||
| 4 | 0.02 | 0.05 | |||
| 4.5 | 0.02 | 0.03 | |||
| 5 | 0.01 | 0.01 | |||
| 5.5 | 0.01 | ||||
| Tension [kN] | |
|---|---|
| Line 1 | 1037.99 |
| Line 2 | 803.54 |
| Line 3 | 908.85 |
| Tension [kN] | |
|---|---|
| Line 1 | 4.36 × 10−7 |
| Line 2 | 3.10 × 10−7 |
| Line 3 | 3.33 × 10−7 |
| Line | Anchor Coordinates | Line Length [m] | ||
|---|---|---|---|---|
| x [m] | y [m] | z [m] | ||
| 1 | −330 | 0 | −70 | 300.68 |
| 2 | 135 | 233.83 | −70 | 238.68 |
| 3 | 140 | −242.49 | −70 | 248.68 |
| Parameter | Value | ||
|---|---|---|---|
| Line Type | R3 Studless Mooring Chain | ||
| Line Breaking Strength | 16,405 kN | 22,286 kN | 26,749 kN |
| Nominal Chain Diameter | 152 mm | 185 mm | 210 mm |
| Dry Line Linear Density | 462 kg/m | 685 kg/m | 882 kg/m |
| Extensional Stiffness | 1973.08 MN | 3270 MN | 3766.14 MN |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Jiang, J.; Zhang, W.; Li, C.B.; Zhou, H.; Jiang, Y.; Sun, X. Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea. J. Mar. Sci. Eng. 2024, 12, 33. https://doi.org/10.3390/jmse12010033
Chen M, Jiang J, Zhang W, Li CB, Zhou H, Jiang Y, Sun X. Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea. Journal of Marine Science and Engineering. 2024; 12(1):33. https://doi.org/10.3390/jmse12010033
Chicago/Turabian StyleChen, Mingsheng, Jiale Jiang, Wei Zhang, Chun Bao Li, Hao Zhou, Yichen Jiang, and Xinghan Sun. 2024. "Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea" Journal of Marine Science and Engineering 12, no. 1: 33. https://doi.org/10.3390/jmse12010033
APA StyleChen, M., Jiang, J., Zhang, W., Li, C. B., Zhou, H., Jiang, Y., & Sun, X. (2024). Study on Mooring Design of 15 MW Floating Wind Turbines in South China Sea. Journal of Marine Science and Engineering, 12(1), 33. https://doi.org/10.3390/jmse12010033