



A Novel, Finite-Time, Active Fault-Tolerant Control Framework for Autonomous Surface Vehicle with Guaranteed Performance

Abstract
:1. Introduction
- (1)
- The paper makes the first attempt to develop an integrated FD, FE, and FTC framework for ASV. Through the utilization of transformed performance constraints, a monitoring function with low complexity is formulated to supervise system behavior and facilitate fault detection. This approach eliminates the need for intricate threshold calculations as seen in existing works such as [44,45,46].
- (2)
- The concept of FTPF is first introduced to solve the fault-tolerant problem of ASVs. A nominal controller and a reconfigured controller are proposed by integrating the FTPF and Barrier Lyapunov functions. Using the proposed controllers, the tracking errors are guaranteed within a specified performance metric in a settling time.
- (3)
2. Problem Formulation and Preliminaries
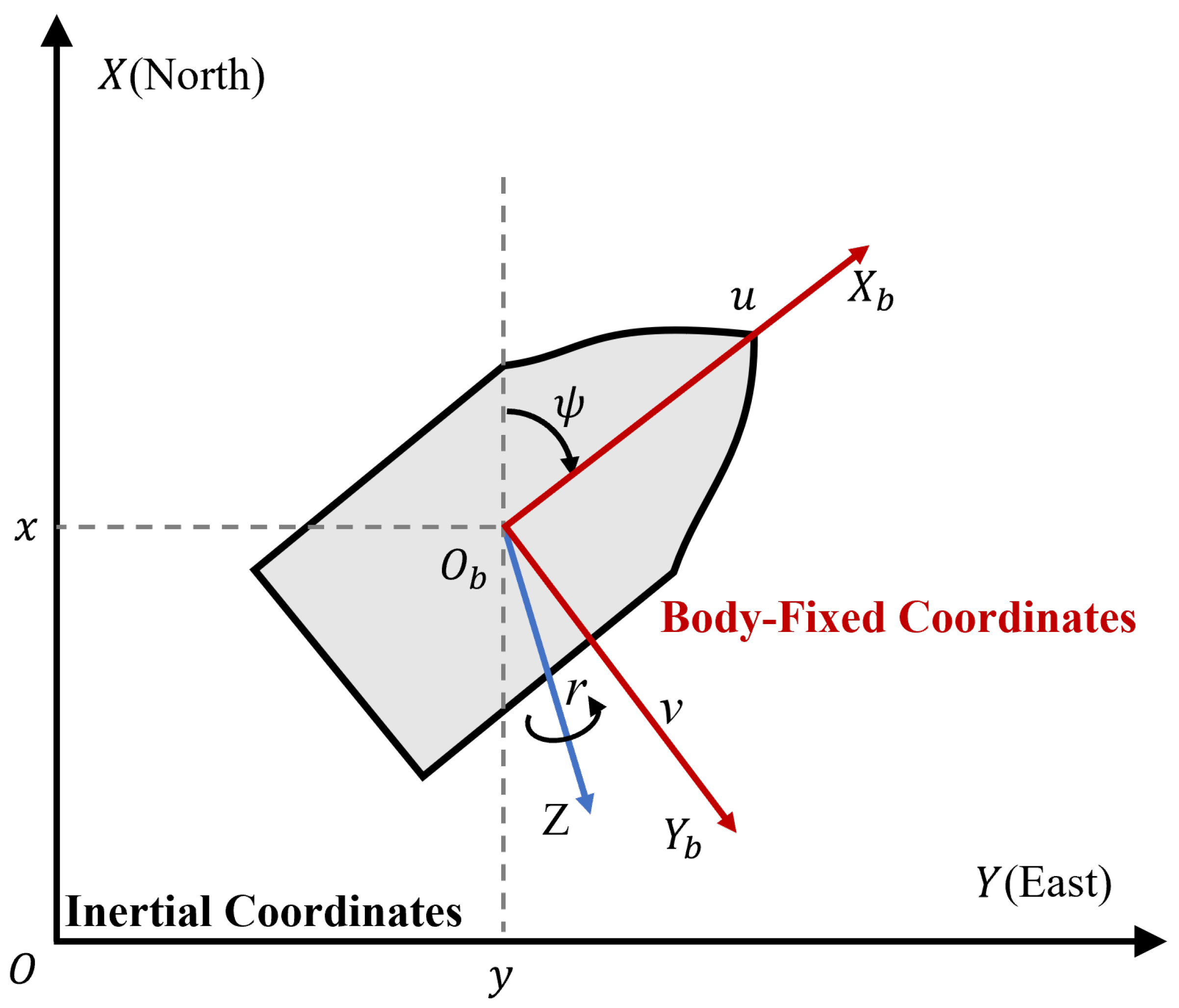
2.1. Problem Statement
2.2. Finite-Time Performance Function
- ;
- ;
- ;
- with being the settling time.
2.3. Error Transformation
- is smooth and strictly increasing;
- ;
- .
3. Main Results
3.1. Nominal Controller Design
- (1)
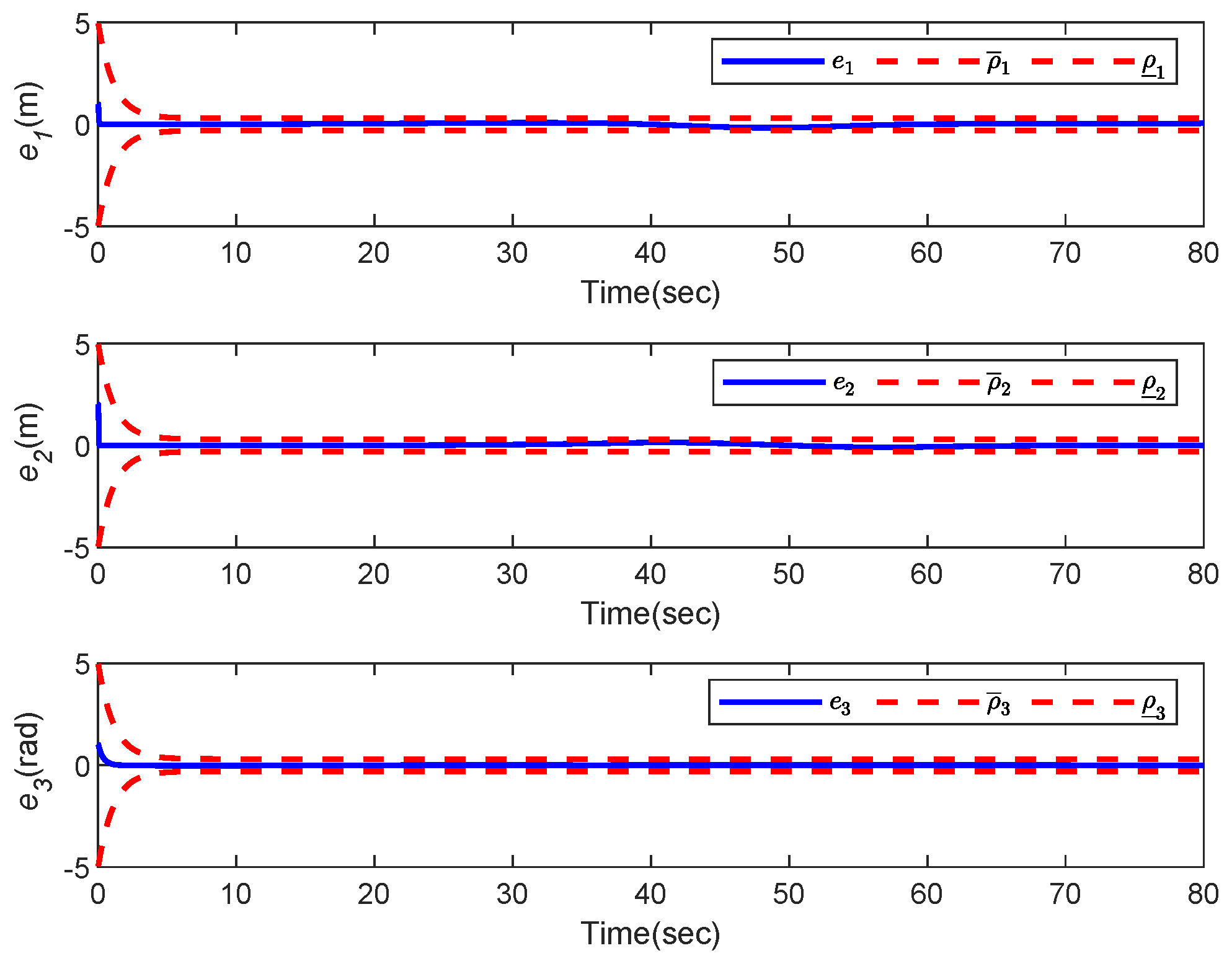
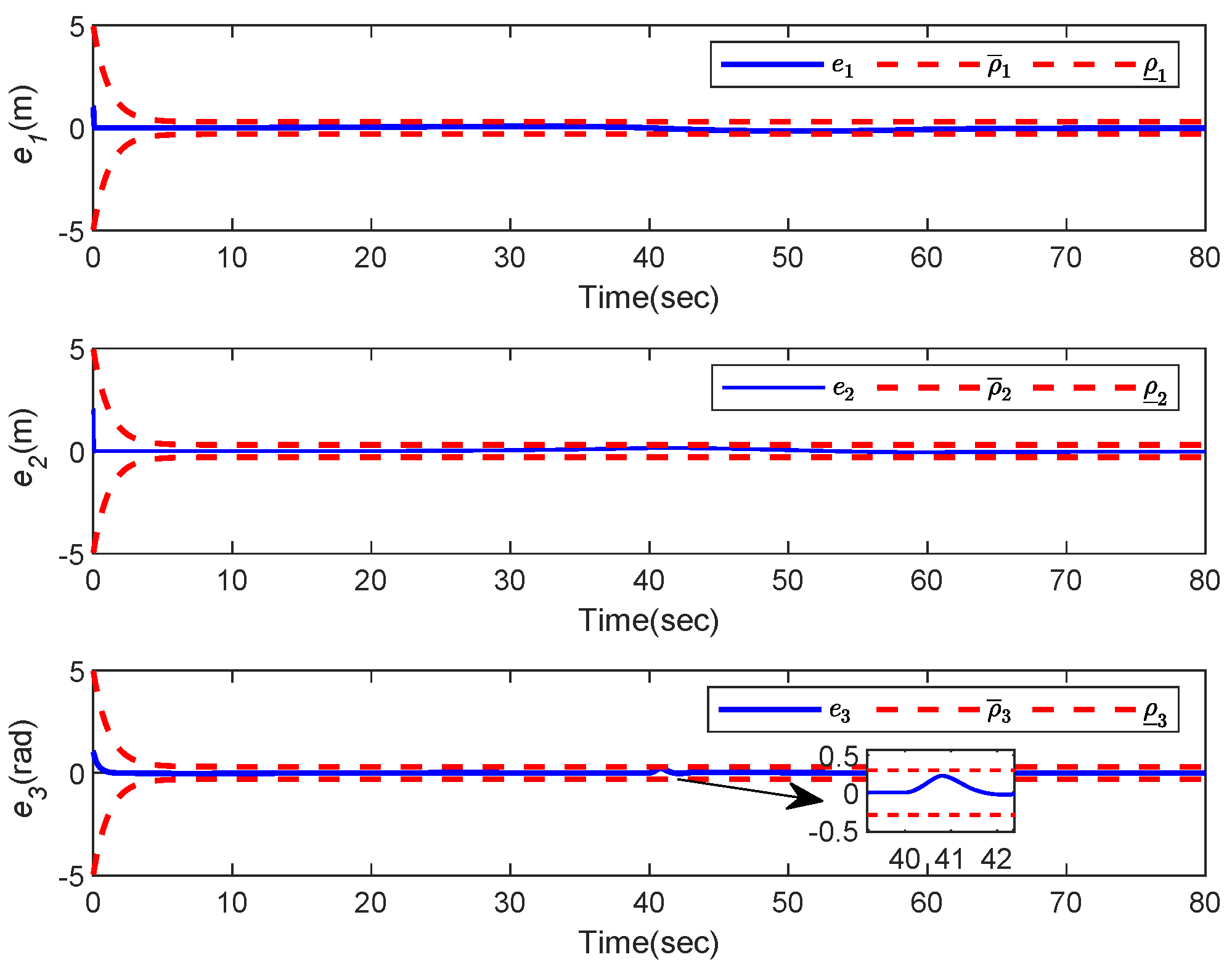
- The closed-loop control system is semi-globally stable, i.e., all signals are bounded. The tracking error converges to the origin within the predefined performance (9) at a settling time.
- (2)
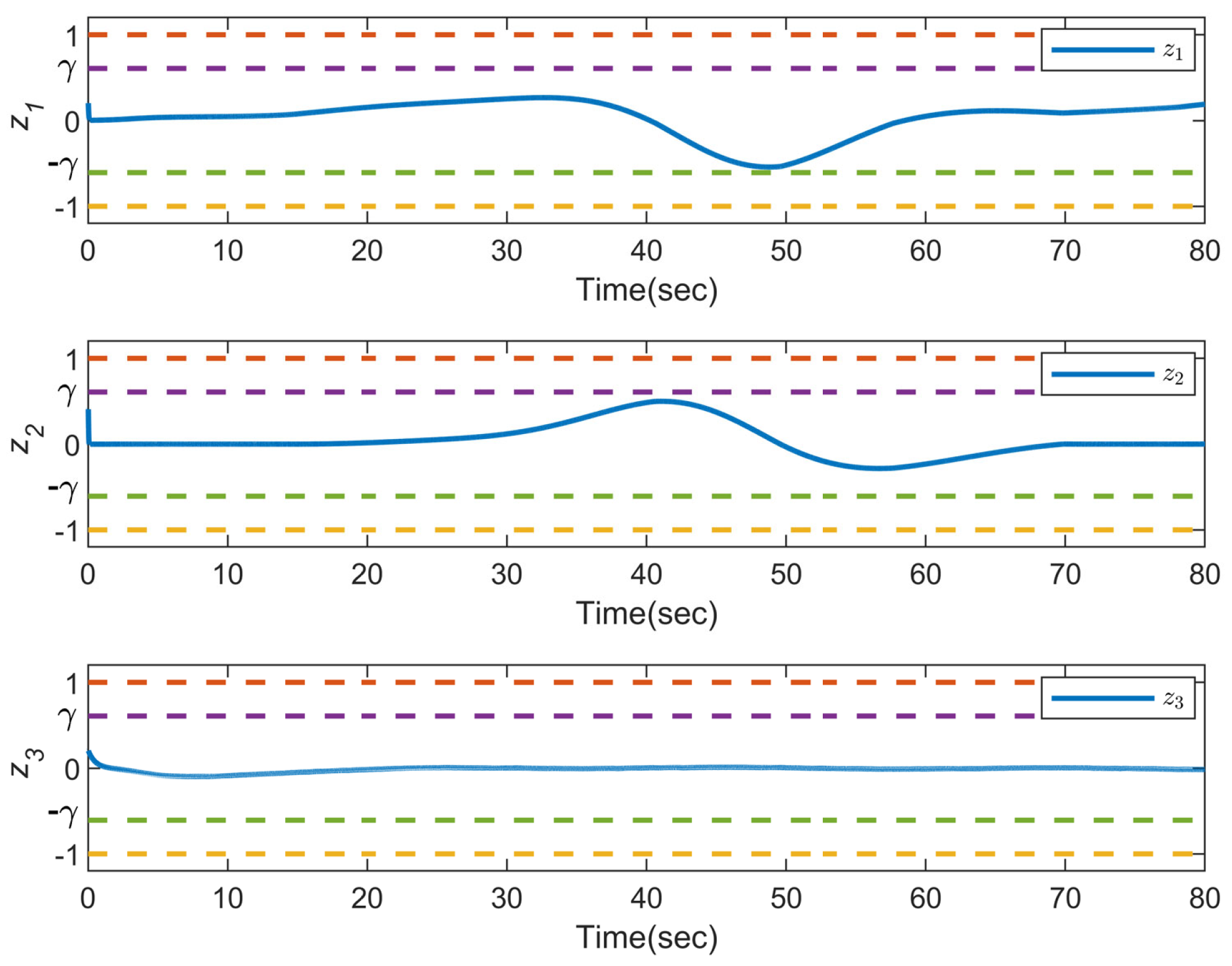
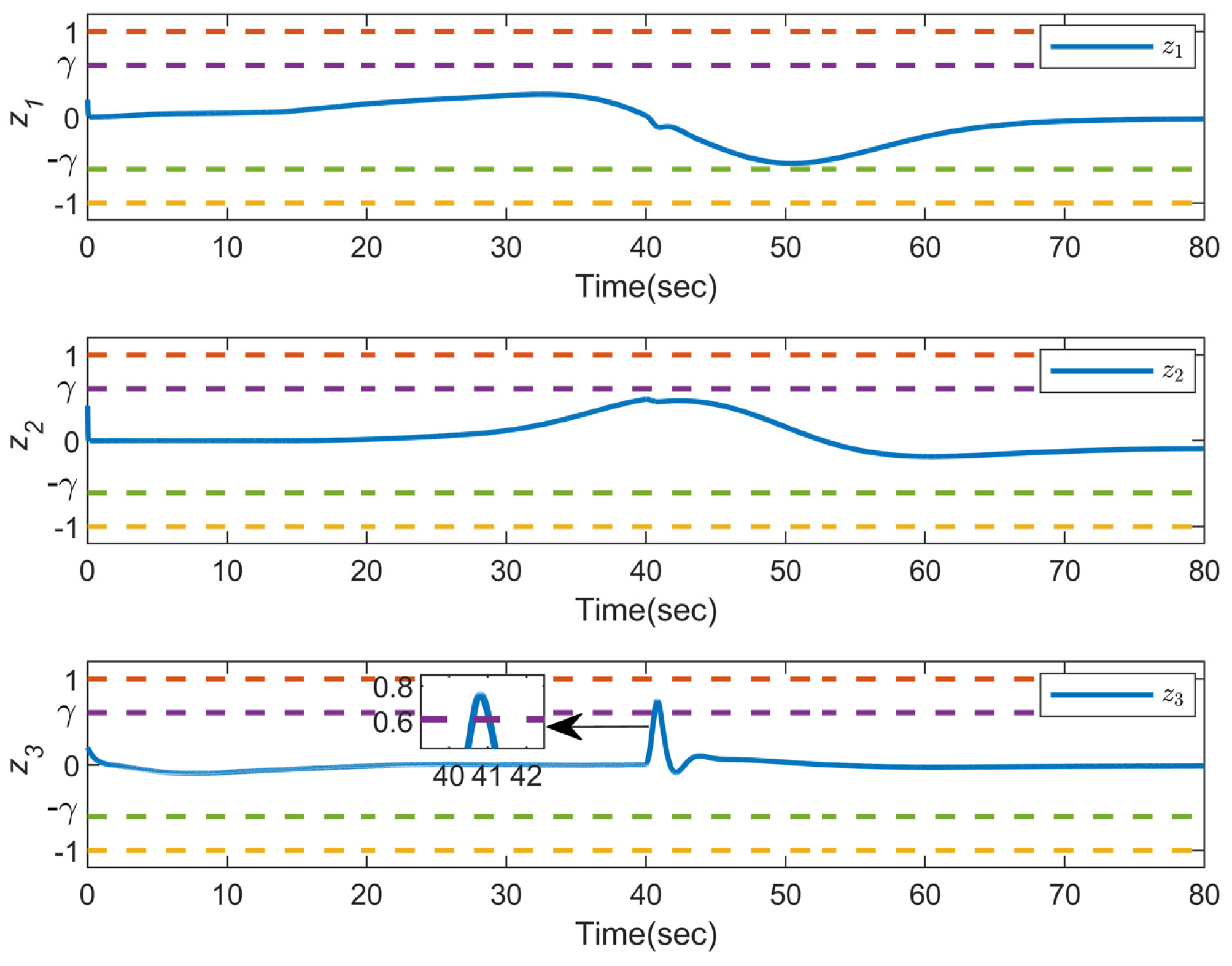
- The transformed tracking error provided by the error transformation (11) satisfieswithwhere γ denotes a tighter bound for the guaranteed performance, μ is a constant depending on the initial state.
3.2. Fault Detection and Reconfigured Controller Design
- (1)
- The closed-loop control system is semi-global stable, i.e., all signals are bounded.
- (2)
- The transformed tracking error is kept in in the compact set .
- (3)
- The tracking error can converge to the origin within the predefined performance (9) at a settling time.
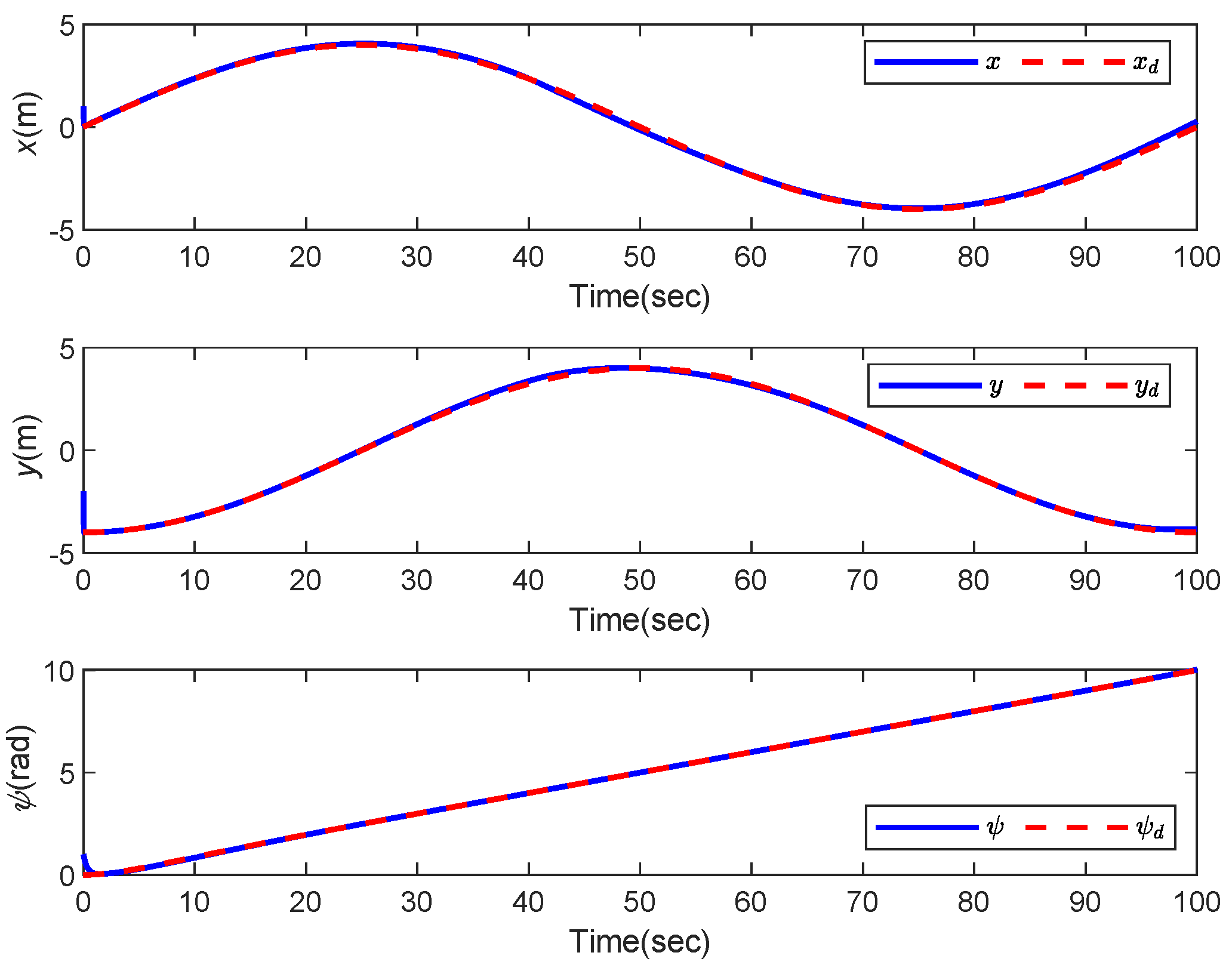
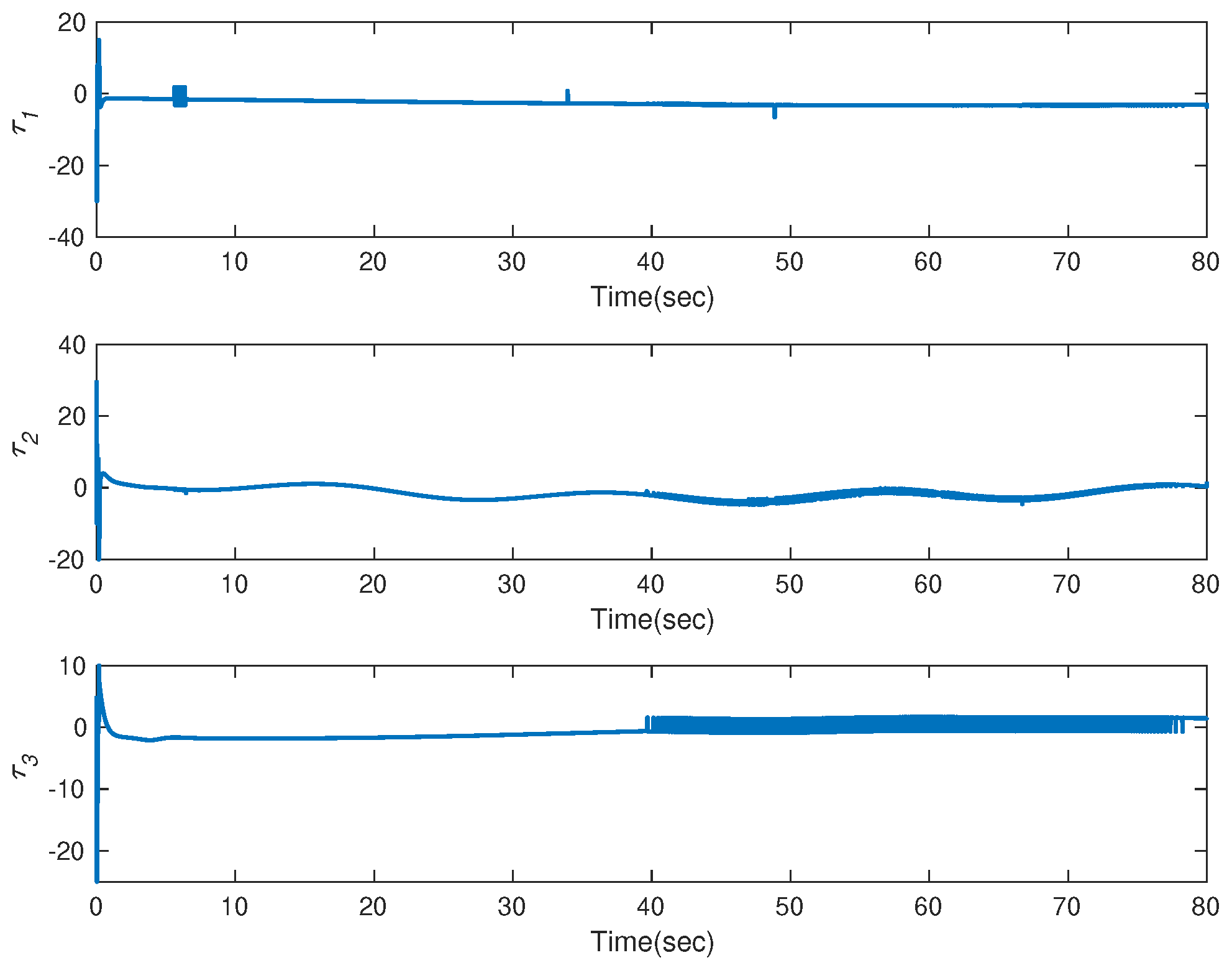
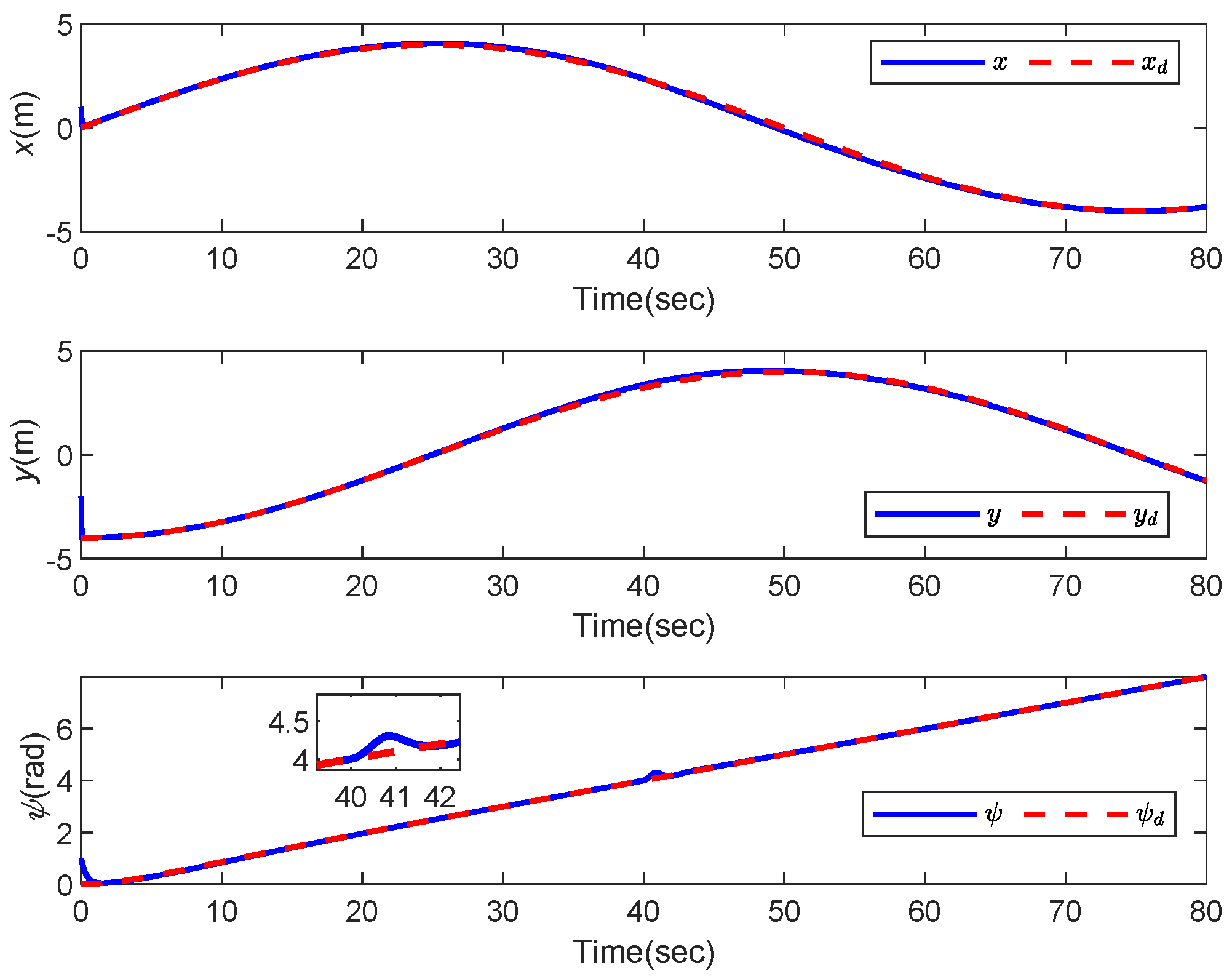
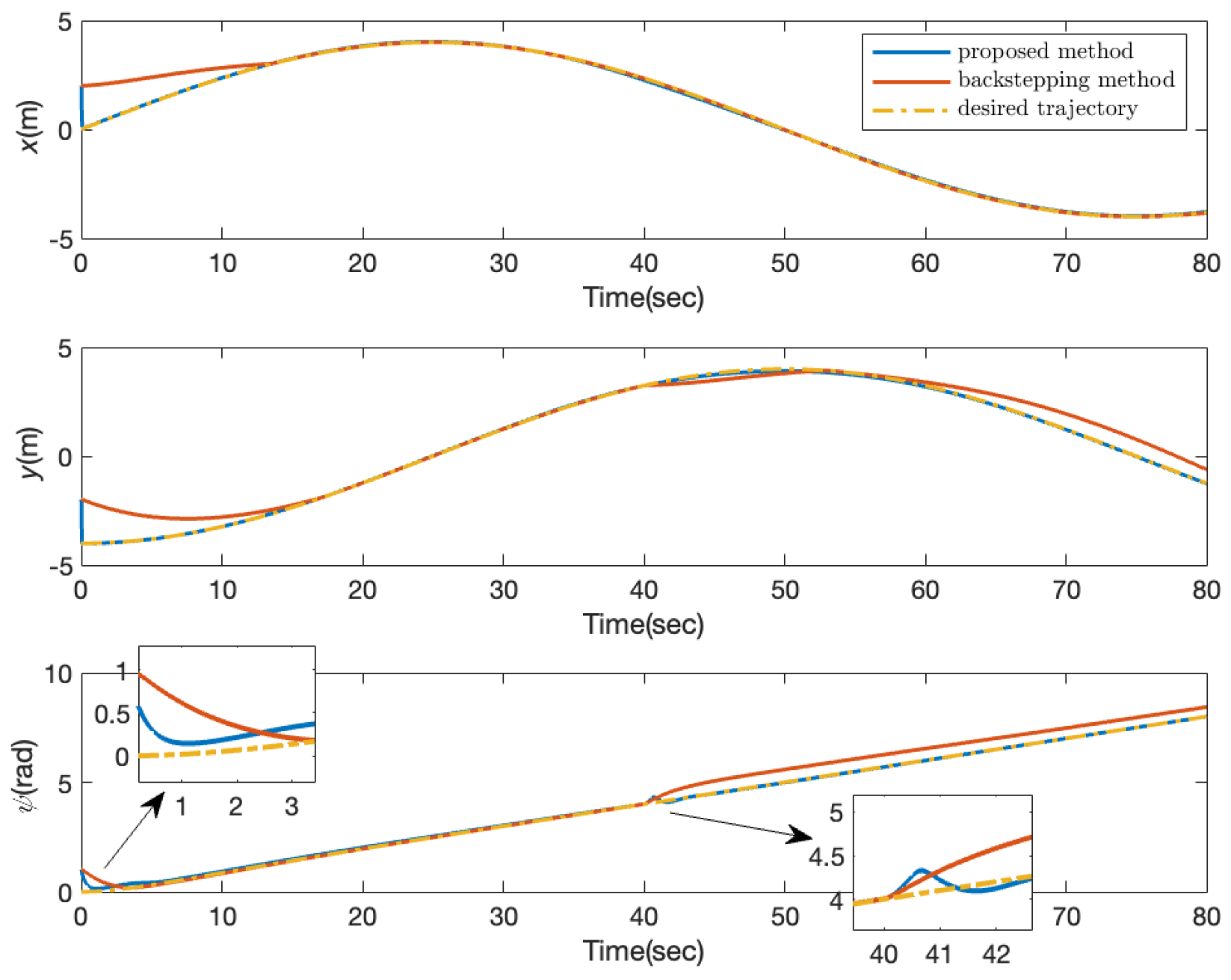
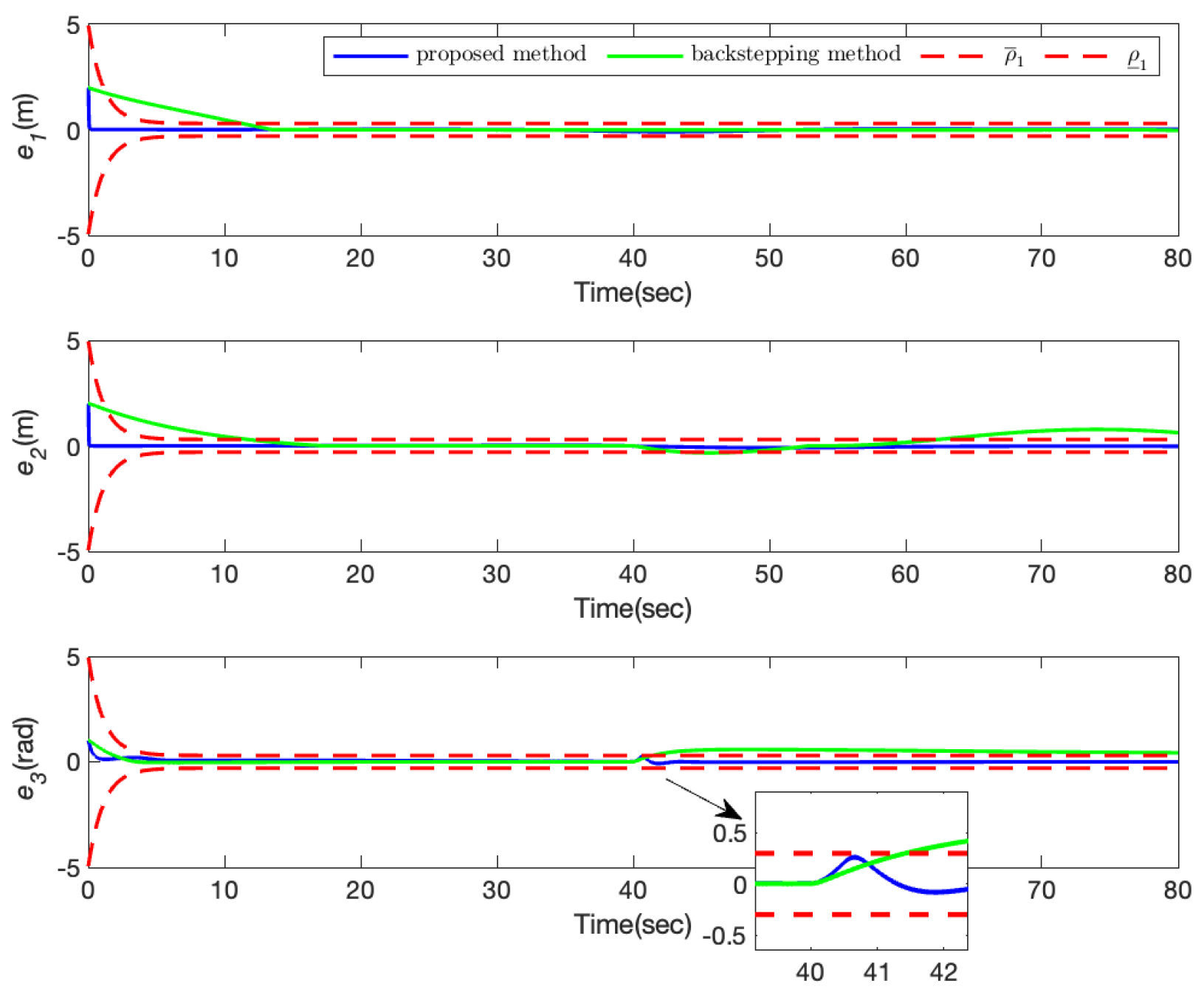
4. Simulation Study
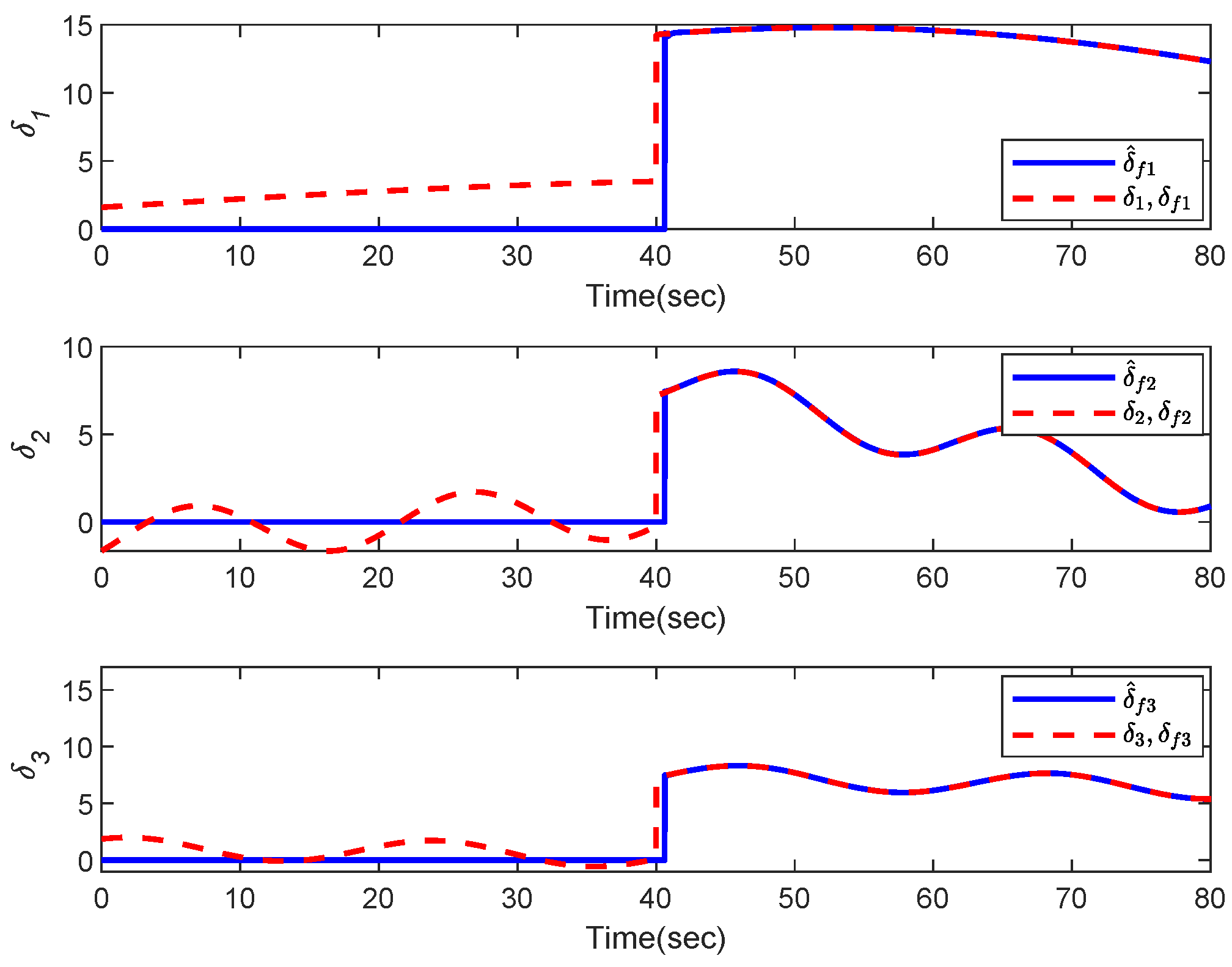
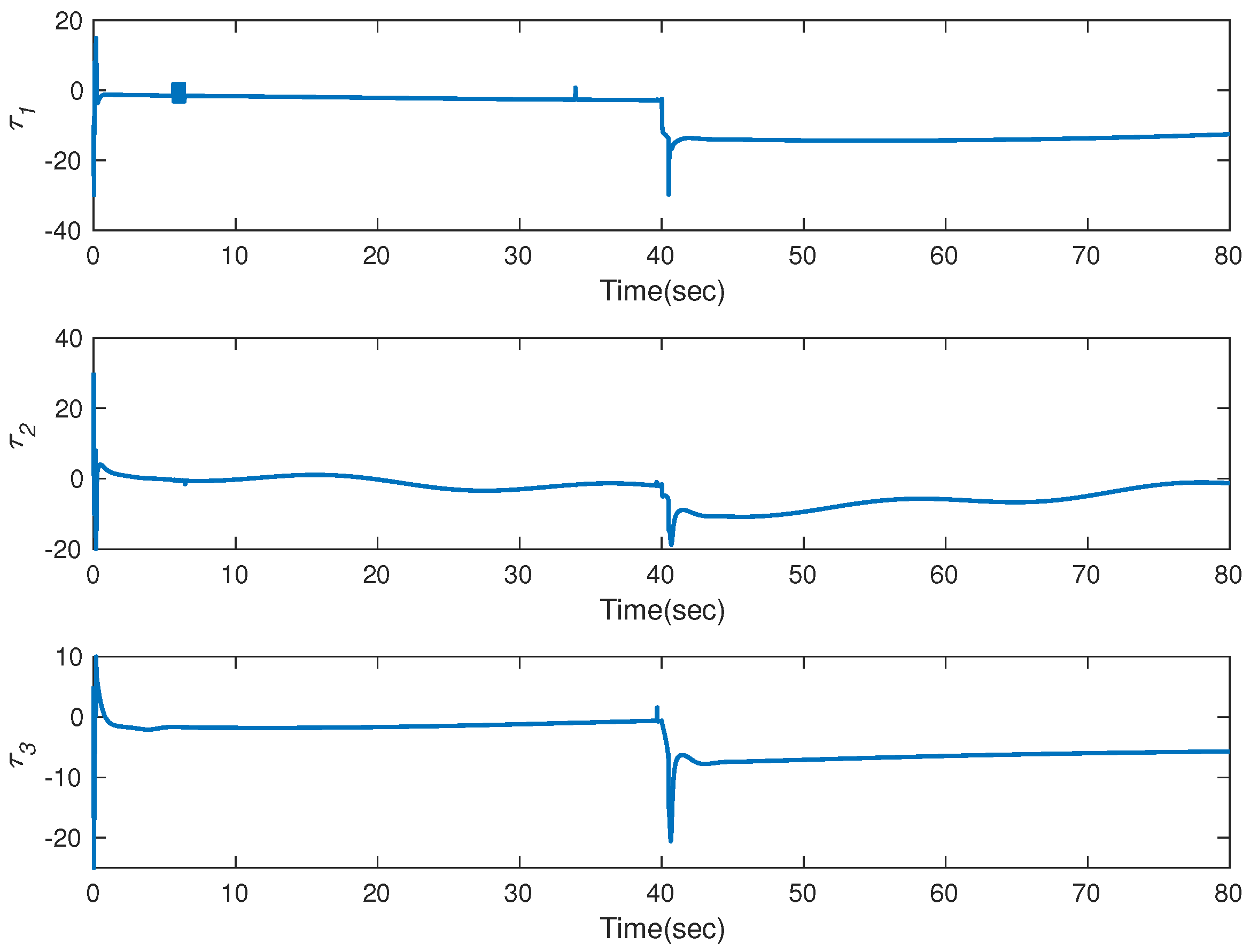
4.1. Fault-Tolerant Ability Verification
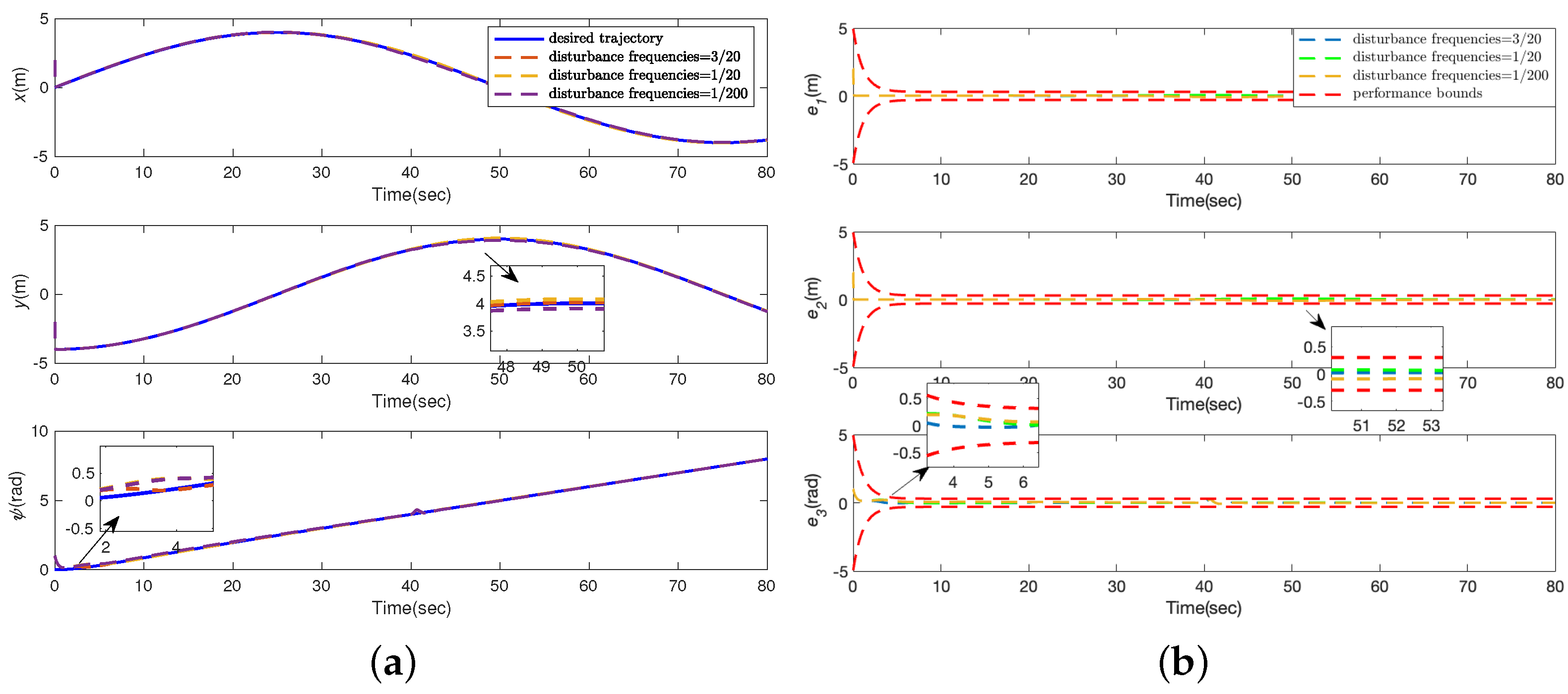
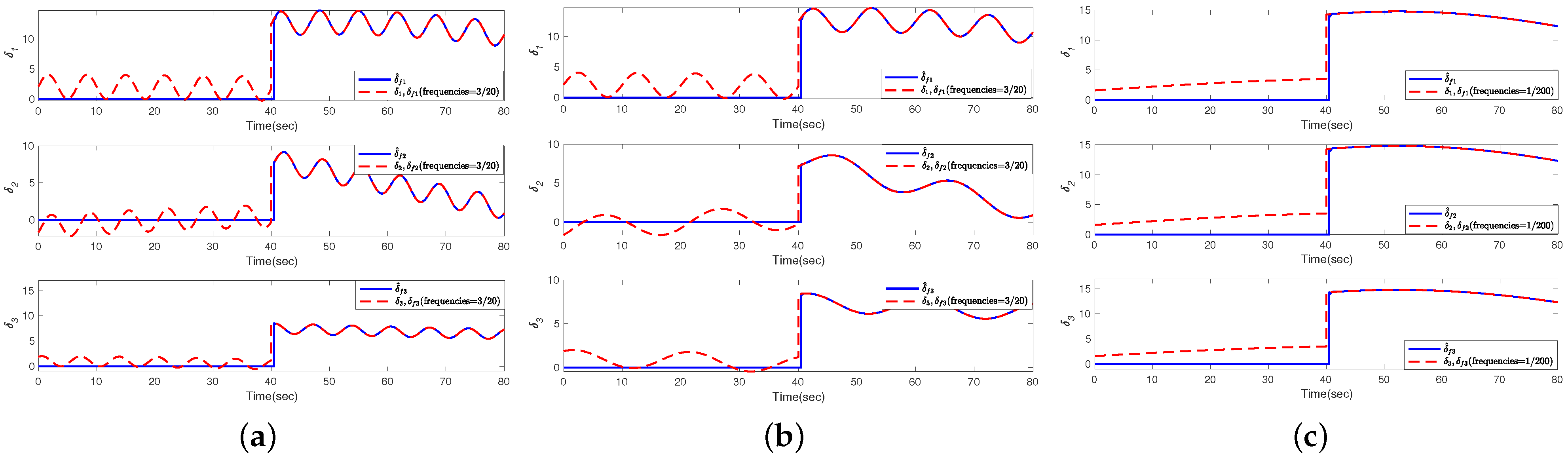
4.2. Robustness Verification
4.3. Advantages Highlight
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASV | autonomous surface vehicle |
| FTC | fault-tolerant control |
| AFTC | active fault-tolerant control |
| PFTC | passive fault-tolerant control |
| FD | fault detection |
| FE | fault estimation |
| LMI | linear matrix inequality |
| FTPF | finite-time performance function |
References
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Shi, Y.; Shen, C.; Fang, H.; Li, H. Advanced Control in Marine Mechatronic Systems: A Survey. IEEE/ASME Trans. Mechatron. 2017, 22, 1121–1131. [Google Scholar] [CrossRef]
- Ren, Y.; Zhang, L.; Ying, Y.; Li, S.; Tang, Y. Model-Parameter-Free Prescribed Time Trajectory Tracking Control for Under-Actuated Unmanned Surface Vehicles with Saturation Constraints and External Disturbances. J. Mar. Sci. Eng. 2023, 11, 1717. [Google Scholar] [CrossRef]
- Li, Z.; Xu, W.; Yu, J.; Wang, C.; Cui, G. Finite-Time Adaptive Heading Tracking Control for Surface Vehicles with Full State Constraints. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1134–1138. [Google Scholar] [CrossRef]
- Zheng, Z.; Huang, Y.; Xie, L.; Zhu, B. Adaptive Trajectory Tracking Control of a Fully Actuated Surface Vessel with Asymmetrically Constrained Input and Output. IEEE Trans. Control Syst. Technol. 2018, 26, 1851–1859. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.; Miao, R.; Li, Y. Formation Control and Obstacle Avoidance Algorithm of a Multi-USV System Based on Virtual Structure and Artificial Potential Field. J. Mar. Sci. Eng. 2021, 9, 161. [Google Scholar] [CrossRef]
- Gao, S.; Peng, Z.; Liu, L.; Wang, D.; Han, Q.L. Fixed-Time Resilient Edge-Triggered Estimation and Control of Surface Vehicles for Cooperative Target Tracking under Attacks. IEEE Trans. Intell. Veh. 2023, 8, 547–556. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, M.; Hao, Y. A Novel Region-Construction Method for Multi-USV Cooperative Target Allocation in Air-Ocean Integrated Environments. J. Mar. Sci. Eng. 2023, 11, 1369. [Google Scholar] [CrossRef]
- Gu, N.; Wang, D.; Peng, Z.; Wang, J.; Han, Q.L. Disturbance observers and extended state observers for marine vehicles: A survey. Control Eng. Pract. 2022, 123, 105158. [Google Scholar] [CrossRef]
- Zhang, G.; Chu, S.; Huang, J.; Zhang, W. Robust adaptive fault-tolerant control for unmanned surface vehicle via the multiplied event-triggered mechanism. Ocean Eng. 2022, 249, 110755. [Google Scholar] [CrossRef]
- Liu, Z.; Ge, X.; Han, Q.; Wang, Y.; Zhang, X. Secure Cooperative Path Following of Autonomous Surface Vehicles under Cyber and Physical Attacks. IEEE Trans. Intell. Veh. 2023, 8, 3680–3691. [Google Scholar] [CrossRef]
- Wu, W.; Tong, S. Fixed-time formation fault tolerant control for unmanned surface vehicle systems with intermittent actuator faults. Ocean Eng. 2023, 281, 114813. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, X.; Wang, X.; Ren, X. Adaptive fault identification and reconfigurable fault-tolerant control for unmanned surface vehicle with actuator magnitude and rate faults. Int. J. Robust Nonlinear Control 2023, 33, 5463–5483. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. State recovery and disturbance estimation of unmanned surface vehicles based on nonlinear extended state observers. Ocean Eng. 2019, 171, 625–632. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-tolerant control systems: A comparative study between active and passive approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Q.; Sun, C. Prescribed Performance Fault-Tolerant Control for Uncertain Nonlinear MIMO System Using Actor–Critic Learning Structure. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 4479–4490. [Google Scholar] [CrossRef]
- Shao, X.; Hu, Q.; Shi, Y.; Jiang, B. Fault-Tolerant Prescribed Performance Attitude Tracking Control for Spacecraft under Input Saturation. IEEE Trans. Control Syst. Technol. 2020, 28, 574–582. [Google Scholar] [CrossRef]
- Yang, W.; Yu, W.; Zheng, W.X. Fault-Tolerant Adaptive Fuzzy Tracking Control for Nonaffine Fractional-Order Full-State-Constrained MISO Systems with Actuator Failures. IEEE Trans. Cybern. 2022, 52, 8439–8452. [Google Scholar] [CrossRef]
- Saeed Nasrolahi, S.; Abdollahi, F.; Rezaee, H. Decentralized active sensor fault tolerance in attitude control of satellite formation flying. Int. J. Robust Nonlinear Control 2020, 30, 8340–8361. [Google Scholar] [CrossRef]
- Cai, M.; He, X.; Zhou, D. An active fault tolerance framework for uncertain nonlinear high-order fully-actuated systems. Automatica 2023, 152, 110969. [Google Scholar] [CrossRef]
- Hu, H.; Wang, B.; Cheng, Z.; Liu, L.; Wang, Y.; Luo, X. A novel active fault-tolerant control for spacecrafts with full state constraints and input saturation. Aerosp. Sci. Technol. 2021, 108, 106368. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, S.; Kim, Y.; Seah, C.E. A Survey of Fault Detection, Isolation, and Reconfiguration Methods. IEEE Trans. Control Syst. Technol. 2010, 18, 636–653. [Google Scholar] [CrossRef]
- Qiu, A.; Al-Dabbagh, A.W.; Chen, T. A Tradeoff Approach for Optimal Event-Triggered Fault Detection. IEEE Trans. Ind. Electron. 2019, 66, 2111–2121. [Google Scholar] [CrossRef]
- Shahriari-kahkeshi, M.; Sheikholeslam, F.; Askari, J. Adaptive fault detection and estimation scheme for a class of uncertain nonlinear systems. Nonlinear Dyn. 2015, 79, 2623–2637. [Google Scholar] [CrossRef]
- Wang, N.; Lv, S.; Er, M.J.; Chen, W.H. Fast and Accurate Trajectory Tracking Control of an Autonomous Surface Vehicle with Unmodeled Dynamics and Disturbances. IEEE Trans. Intell. Veh. 2016, 1, 230–243. [Google Scholar] [CrossRef]
- Walker, K.L.; Gabl, R.; Aracri, S.; Cao, Y.; Stokes, A.A.; Kiprakis, A.; Giorgio-Serchi, F. Experimental Validation of Wave Induced Disturbances for Predictive Station Keeping of a Remotely Operated Vehicle. IEEE Robot. Autom. Lett. 2021, 6, 5421–5428. [Google Scholar] [CrossRef]
- Walker, K.L.; Giorgio-Serchi, F. Disturbance Preview for Non-Linear Model Predictive Trajectory Tracking of Underwater Vehicles in Wave Dominated Environments. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 6169–6176. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Yang, G.H. Distributed Fault Detection and Isolation for Multiagent Systems: An Interval Observer Approach. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2220–2230. [Google Scholar] [CrossRef]
- Wang, X. Active Fault Tolerant Control for Unmanned Underwater Vehicle with Sensor Faults. IEEE Trans. Instrum. Meas. 2020, 69, 9485–9495. [Google Scholar] [CrossRef]
- Rout, R.; Cui, R.; Han, Z. Modified Line-of-Sight Guidance Law with Adaptive Neural Network Control of Underactuated Marine Vehicles with State and Input Constraints. IEEE Trans. Control Syst. Technol. 2020, 28, 1902–1914. [Google Scholar] [CrossRef]
- Wang, T.; Liu, Y.; Zhang, X. Extended state observer-based fixed-time trajectory tracking control of autonomous surface vessels with uncertainties and output constraints. ISA Trans. 2022, 128, 174–183. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, S.; Yan, Y. Fixed-time extended state observer-based trajectory tracking and point stabilization control for marine surface vessels with uncertainties and disturbances. Ocean Eng. 2019, 186, 106109. [Google Scholar] [CrossRef]
- Fu, H.; Yao, W.; Cajo, R.; Zhao, S. Trajectory Tracking Predictive Control for Unmanned Surface Vehicles with Improved Nonlinear Disturbance Observer. J. Mar. Sci. Eng. 2023, 11, 1874. [Google Scholar] [CrossRef]
- Liu, W.; Ye, H.; Yang, X. Model-Free Adaptive Sliding Mode Control Method for Unmanned Surface Vehicle Course Control. J. Mar. Sci. Eng. 2023, 11, 1904. [Google Scholar] [CrossRef]
- Bechlioulis, C.P.; Rovithakis, G.A. Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems. Automatica 2009, 45, 532–538. [Google Scholar] [CrossRef]
- Liu, Y.J.; Zeng, Q.; Tong, S.; Chen, C.P.; Liu, L. Actuator failure compensation-based adaptive control of active suspension systems with prescribed performance. IEEE Trans. Ind. Electron. 2019, 67, 7044–7053. [Google Scholar] [CrossRef]
- Theodorakopoulos, A.; Rovithakis, G.A. Low-Complexity Prescribed Performance Control of Uncertain MIMO Feedback Linearizable Systems. IEEE Trans. Autom. Control 2016, 61, 1946–1952. [Google Scholar] [CrossRef]
- Bikas, L.N.; Rovithakis, G.A. Combining Prescribed Tracking Performance and Controller Simplicity for a Class of Uncertain MIMO Nonlinear Systems with Input Quantization. IEEE Trans. Autom. Control 2019, 64, 1228–1235. [Google Scholar] [CrossRef]
- Wang, H.; Li, M.; Zhang, C.; Shao, X. Event-Based Prescribed Performance Control for Dynamic Positioning Vessels. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2548–2552. [Google Scholar] [CrossRef]
- Zhang, J.; Chai, T. Singularity-Free Continuous Adaptive Control of Uncertain Underactuated Surface Vessels with Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 5646–5655. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Jing, Y.; Zhang, Z. A Novel Finite-Time Adaptive Fuzzy Tracking Control Scheme for Nonstrict Feedback Systems. IEEE Trans. Fuzzy Syst. 2019, 27, 646–658. [Google Scholar] [CrossRef]
- Sui, S.; Tong, S. Finite-Time Fuzzy Adaptive PPC for Nonstrict-Feedback Nonlinear MIMO Systems. IEEE Trans. Cybern. 2023, 53, 732–742. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, K.; Jiang, B. Fixed-Time Fault-Tolerant Formation Control for a Cooperative Heterogeneous Multiagent System with Prescribed Performance. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 462–474. [Google Scholar] [CrossRef]
- Wang, X. Active Fault Tolerant Control for Unmanned Underwater Vehicle with Actuator Fault and Guaranteed Transient Performance. IEEE Trans. Intell. Veh. 2021, 6, 470–479. [Google Scholar] [CrossRef]
- Ouyang, H.; Lin, Y. Adaptive Fault-Tolerant Control and Performance Recovery against Actuator Failures with Deferred Actuator Replacement. IEEE Trans. Autom. Control 2021, 66, 3810–3817. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, G. Supervisory switching-based prescribed performance control of unknown nonlinear systems against actuator failures. Int. J. Robust Nonlinear Control 2020, 30, 2367–2385. [Google Scholar] [CrossRef]
- Wang, W.; Wen, C. Adaptive actuator failure compensation control of uncertain nonlinear systems with guaranteed transient performance. Automatica 2010, 46, 2082–2091. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Wei, H.; Shi, Y. Mpc-based motion planning and control enables smarter and safer autonomous marine vehicles: Perspectives and a tutorial survey. IEEE/CAA J. Autom. Sin. 2023, 10, 8–24. [Google Scholar] [CrossRef]
- Guerreiro, B.J.; Silvestre, C.; Cunha, R.; Pascoal, A. Trajectory Tracking Nonlinear Model Predictive Control for Autonomous Surface Craft. IEEE Trans. Control Syst. Technol. 2014, 22, 2160–2175. [Google Scholar] [CrossRef]
- Cui, Y.; Peng, L.; Li, H. Filtered Probabilistic Model Predictive Control-Based Reinforcement Learning for Unmanned Surface Vehicles. IEEE Trans. Ind. Inform. 2022, 18, 6950–6961. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotović, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]
- Ouyang, H.; Lin, Y. Adaptive fault-tolerant control for actuator failures: A switching strategy. Automatica 2017, 81, 87–95. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Value | Factor | Value | Factor | Value |
|---|---|---|---|---|---|
| 23.8 | −0.8612 | −2 | |||
| 1.76 | −36.2823 | −10 | |||
| 0.046 | 0.1079 | 0 | |||
| −0.7225 | 0.1052 | 0 | |||
| −1.3274 | 5.0437 | −1 | |||
| −5.8664 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Ouyang, Y.; Wang, X.; Wang, Q. A Novel, Finite-Time, Active Fault-Tolerant Control Framework for Autonomous Surface Vehicle with Guaranteed Performance. J. Mar. Sci. Eng. 2024, 12, 347. https://doi.org/10.3390/jmse12020347
Wang X, Ouyang Y, Wang X, Wang Q. A Novel, Finite-Time, Active Fault-Tolerant Control Framework for Autonomous Surface Vehicle with Guaranteed Performance. Journal of Marine Science and Engineering. 2024; 12(2):347. https://doi.org/10.3390/jmse12020347
Chicago/Turabian StyleWang, Xuerao, Yuncheng Ouyang, Xiao Wang, and Qingling Wang. 2024. "A Novel, Finite-Time, Active Fault-Tolerant Control Framework for Autonomous Surface Vehicle with Guaranteed Performance" Journal of Marine Science and Engineering 12, no. 2: 347. https://doi.org/10.3390/jmse12020347
APA StyleWang, X., Ouyang, Y., Wang, X., & Wang, Q. (2024). A Novel, Finite-Time, Active Fault-Tolerant Control Framework for Autonomous Surface Vehicle with Guaranteed Performance. Journal of Marine Science and Engineering, 12(2), 347. https://doi.org/10.3390/jmse12020347