
uw-WiFi: Small-Scale Data Collection Network-Based Underwater Internet of Things


 ,
,
Abstract
:1. Introduction
- Establish the network communication link quickly. One of the key challenges that this type of underwater acoustic network needs to address is the need for rapid exploration and monitoring of a specific area in real-world applications, as well as the quick transmission of results to an onshore platform for other task planning purposes. In the target marine area, the deployment positions of network nodes are relatively random, and it is not necessary to specify a specific deployment location for each node. Therefore, after deploying the corresponding network nodes in this area, it is necessary to quickly establish network connections between the onshore platform and multiple underwater network nodes, allowing the onshore platform to quickly understand the underwater environment and situational information based on the sensor data reported by the network nodes.
- Address the dynamically changing network topology. In this type of underwater acoustic network, there may be issues with network topology changes due to the addition or departure of nodes for various reasons. For example, underwater network nodes are typically powered by batteries, and when the battery is depleted, the node leaves the network and rejoins after being redeployed. Additionally, to meet the requirements of multidimensional and flexible data collection, a specific number of mobile nodes are deployed based on the actual situation to perform the corresponding data collection tasks. These mobile nodes may leave the communication range of the data aggregation node to collect data and then return for data reporting. In such cases, the unpredictable changes in the number of nodes and the topology of the underwater network pose high demands on the scalability and robustness of the network.
- Configure network operational parameters appropriately. The underwater acoustic channel is significantly affected by the underwater environment. For example, the non-autonomous movement of network nodes caused by factors such as ocean currents, tides, and waves results in severe Doppler effects. This phenomenon degrades carrier recovery and symbol synchronization, leading to data loss and communication failures. Additionally, the propagation speed of sound signals underwater is influenced by temperature, pressure, and salinity. This ultimately manifests as a sound velocity profile, where sound signals have different propagation speeds at different depths. Sound signals also exhibit characteristics of bending towards regions with lower sound velocity during propagation. In shallow water environments, phenomena like the “afternoon effect” can easily occur, causing the communication link to be unstable and experiencing temporal and spatial uncertainties. Therefore, during network operation, it is necessary to understand the current operating environment and configure the network node’s operational parameters accordingly in real-time.
2. Related Work
3. Design of the uw-WiFi Network
3.1. Targeted Scenarios
3.1.1. Rapidly Building a Network
3.1.2. Diverse Forms of Nodes
3.1.3. Bidirectional Data Transmission
3.1.4. Stable and Efficient Network Performance
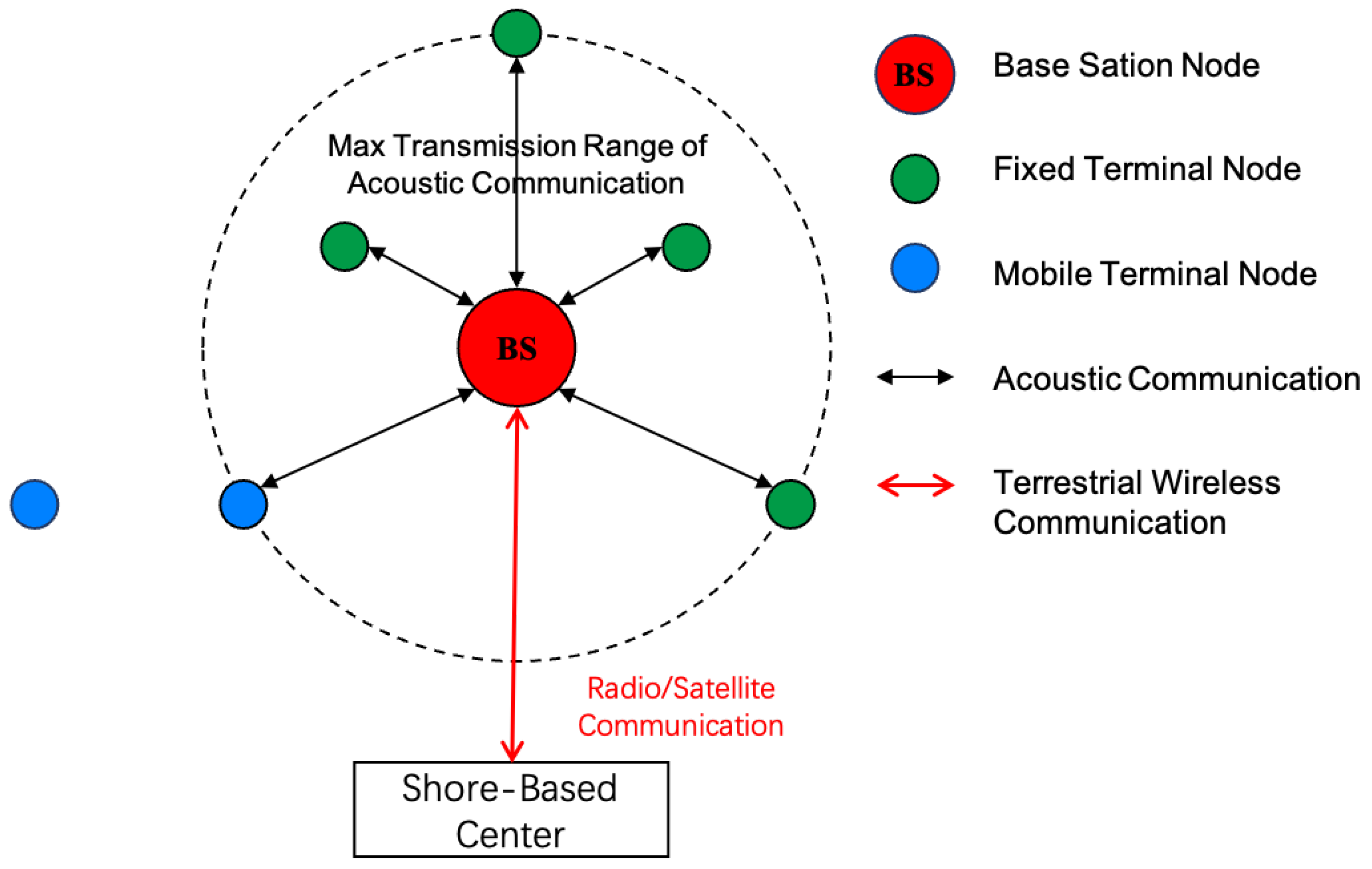
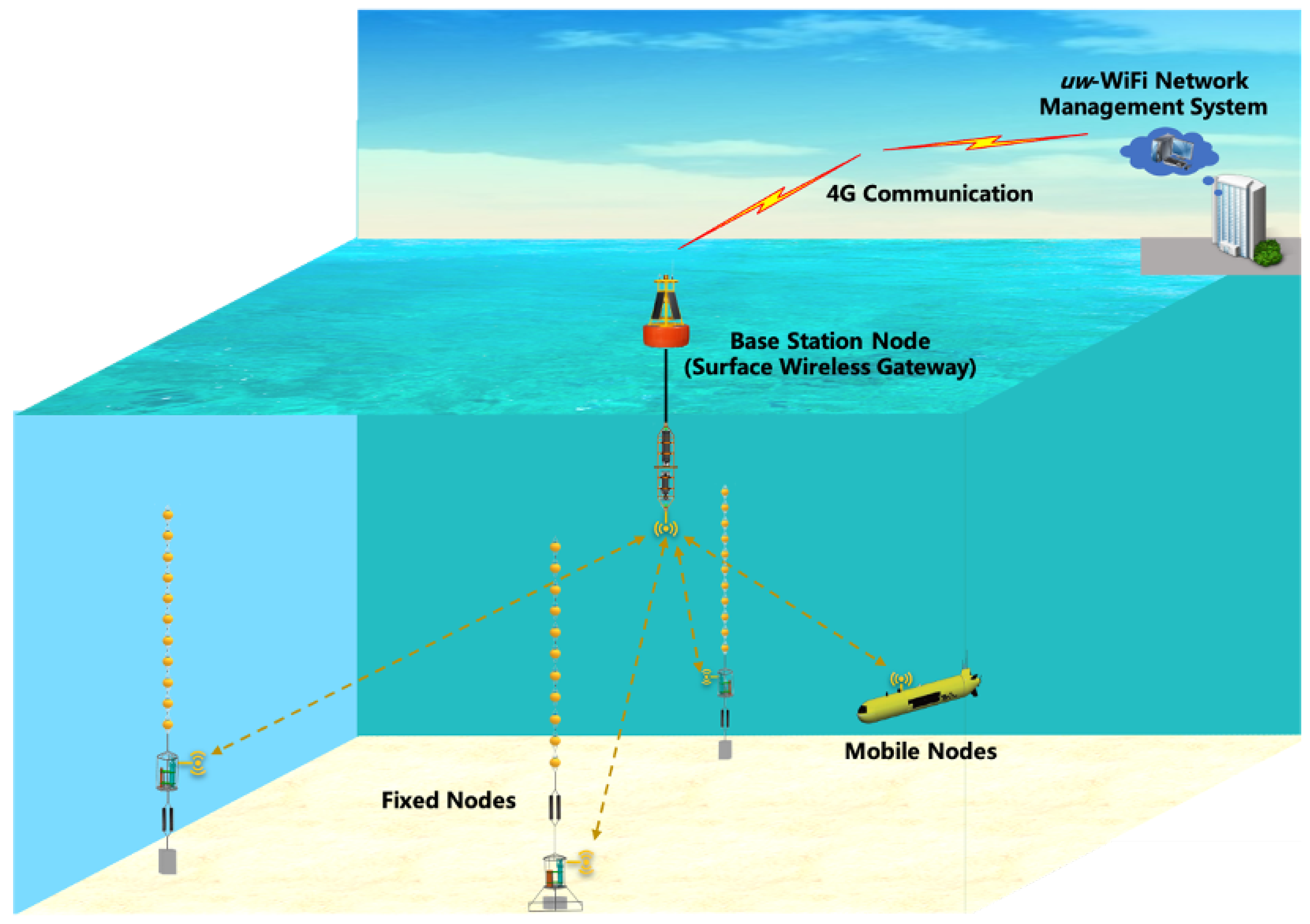
3.2. Architecture of uw-WiFi
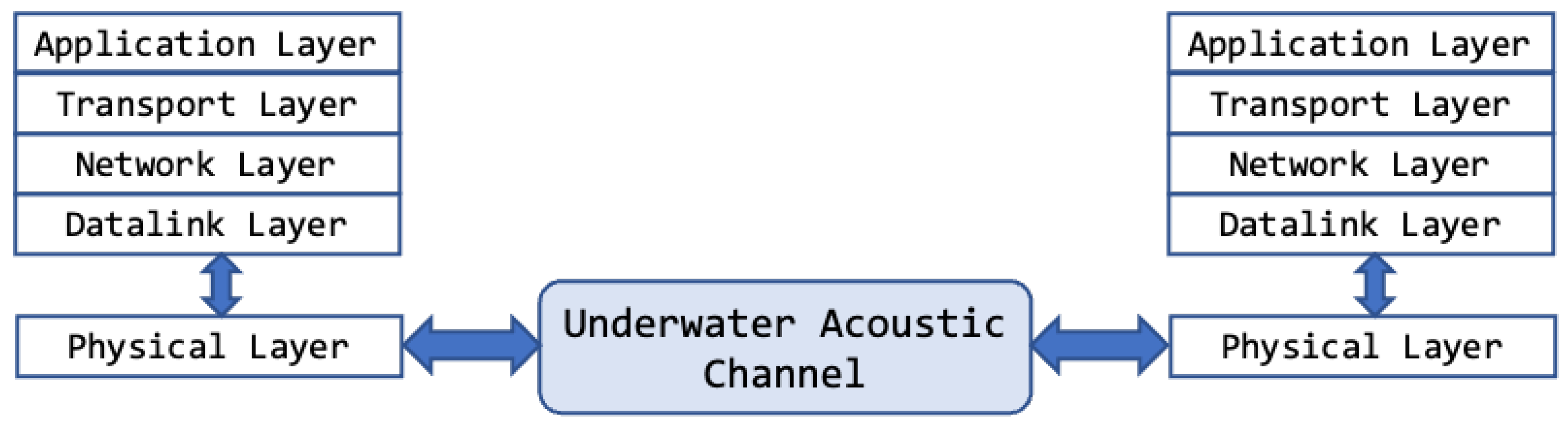
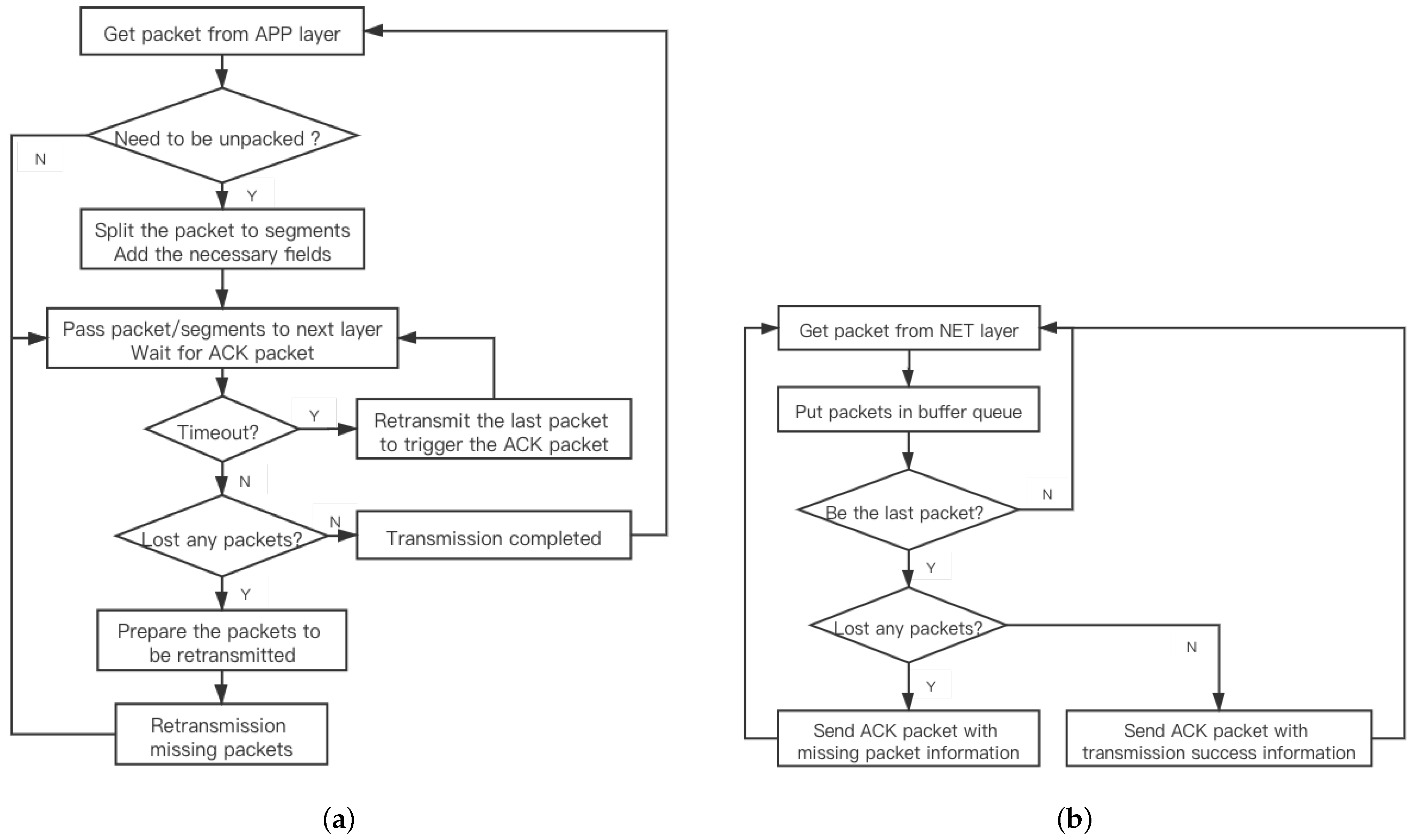
3.3. Design of Protocols for uw-WiFi
4. A Case Study of the uw-WiFi Network
4.1. Network Components
4.2. Protocols and Applications
- Check the status of the specified terminal node. If the base station node receives the response packet within the specified time, the terminal node is considered to be in good status.
- Set the transmission mode of the terminal nodes. Users can reset the transmission mode depending on the actual underwater acoustic channel conditions.
- Set the data generation/send interval of the terminal nodes. The terminal nodes that receive this instruction would execute the new settings.
4.3. Deployment Environment
4.4. Performance Metrics
- Data rate represents the number of bits of data transmitted on the channel per second, also known as the bit rate. The unit of this rate is bps (bits per second) or b/s.
- Data latency indicates the time it takes for data (a packet or bits) to travel from one end of the network to the other, and it typically includes transmission delay and propagation delay.
- Network packet loss rate indicates the network packet loss during a period of time.
- Throughput represents the amount of data that passes through a network or interface per unit of time, including all uploaded and downloaded traffic.
4.5. Experiment Results
- Data rate & Data latency
- Throughput
- Network packet loss rate
5. Performance Analysis of the uw-WiFi Network
- Network node capacity refers to the number of terminal nodes in a network, excluding the base station nodes.
- Number of packets that a terminal node sent once refers to the number of packets sent by each terminal node within a single time period in the network.
- Network throughput refers to the total amount of data transmitted through the network within a unit of time, usually measured in bits per second (bps).
- Network cycle time refers to the duration between when the main node in the network triggers the current round of time-division scheduling and when it initiates the next round of time-division scheduling.
- Network channel utilization refers to the ratio of the time during which the network transmits valid data to the total time of network operation.
5.1. Network Throughput
5.2. Network Cycle Time
5.3. Network Channel Utilization
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. Challenges: Building Scalable and Distributed Underwater Wireless Sensor Networks (UWSNs) for Aquatic Applications. Channels 2005, 45, 22–35. [Google Scholar]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Sozer, E.M.; Stojanovic, M.; Proakis, J.G. Underwater acoustic networks. IEEE J. Ocean. Eng. 2000, 25, 72–83. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater Sensor Network Applications: A Comprehensive Survey. Int. J. Distrib. Sens. Netw. 2015, 11, 14. [Google Scholar] [CrossRef]
- Domingo, M.C. An overview of the Internet of underwater things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Ali, M.; Miraz, M.H. A Review of Underwater Acoustic, Electromagnetic and Optical Communications. In Proceedings of the International Conference for Emerging Technologies in Computing, London, UK, 19–20 August 2020; pp. 86–97. [Google Scholar]
- Ranjan, A.; Ranjan, A. Underwater wireless communication network. Adv. Electron. Electr. Eng. 2013, 3, 41–46. [Google Scholar]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Jiang, Z. Underwater Acoustic Networks-Issues and solutions. Int. J. Intell. Control. Syst. 2008, 13, 152–161. [Google Scholar]
- Gupta, O.; Goyal, N.; Anand, D.; Kadry, S.; Nam, Y.; Singh, A. Underwater Networked Wireless Sensor Data Collection for Computational Intelligence Techniques: Issues, Challenges, and Approaches. IEEE Access 2020, 8, 122959–122974. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A. Data Collection in Underwater Wireless Sensor Networks: Research Challenges and Potential Approaches. In Proceedings of the 20th ACM International Conference on Modelling, Analysis and Simulation of Wireless and Mobile Systems, New York, NY, USA, 21–25 November 2017; pp. 5–8. [Google Scholar]
- Pu, L.; Luo, Y.; Mo, H.; Peng, Z.; Cui, J.H.; Jiang, Z. Comparing underwater MAC protocols in real sea experiment. In Proceedings of the 2013 IFIP Networking Conference, Brooklyn, NY, USA, 22–24 May 2013; pp. 1–9. [Google Scholar]
- Curtin, T.B.; Bellingham, J.G.; Catipovic, J.; Webb, D. Autonomous Oceanographic Sampling Networks. Oceanography 1993, 6, 86–94. [Google Scholar] [CrossRef]
- Curtin, T.B.; Bellingham, J.G. Progress toward autonomous ocean sampling networks. Deep Sea Res. Part II Top. Stud. Oceanogr. 2009, 56, 62–67. [Google Scholar] [CrossRef]
- Rice, J.A.; Creber, R.K.; Fletcher, C.L.; Baxley, P.A.; Rogers, K.E.; Davison, D.C. Seaweb Underwater Acoustic Nets. In Proceedings of the SSC San Diego Biennial Review, San Diego, CA, USA, 4 October 2001; pp. 234–250. [Google Scholar]
- Rice, J.; Diego, S. Seaweb Acoustic Communication and Navigation Networks. In Proceedings of the International Conference on Underwater Acoustic Measurements: Technologies and Results, Heraklion, Greece, 28 June–1 July 2005. [Google Scholar]
- Rice, J.; Creber, B.; Fletcher, C.; Baxley, P.; Rogers, K.; McDonald, K.; Rees, D.; Wolf, M.; Merriam, S.; Mehio, R.; et al. Evolution of Seaweb underwater acoustic networking. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition, Conference Proceedings (Cat. No.00CH37158), Providence, RI, USA, 11–14 September 2000; Volume 3, pp. 2007–2017. [Google Scholar]
- Rice, J.; Green, D. Underwater Acoustic Communications and Networks for the US Navy’s Seaweb Program. In Proceedings of the 2008 Second International Conference on Sensor Technologies and Applications (Sensorcomm 2008), Cap Esterel, France, 25–31 August 2008; pp. 715–722. [Google Scholar]
- Grund, M.; Freitag, L.; Preisig, J.; Ball, K. The PLUSNet Underwater Communications System: Acoustic Telemetry for Undersea Surveillance. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–22 September 2006; pp. 1–5. [Google Scholar]
- Açar, G.; Adams, A. ACMENet: An underwater acoustic sensor network protocol for real-time environmental monitoring in coastal areas. IEEE Proc. Radar Sonar Navig. 2006, 153, 365–380. [Google Scholar] [CrossRef]
- Real-Arce, D.A.; Morales, T.; Barrera, C.; Hernáâs, J. Smart and networking underwater robots in cooperation meshes: The swarms ECSEL: H2020 project. In Instrumentation Viewpoint; SARTI: Vilanova i la Geltrú, Spain, 2016; p. 19. [Google Scholar]
- Zhang, S.; Yu, J.; Zhang, A.; Yang, L.; Shu, Y. Marine Vehicle Sensor Network Architecture and Protocol Designs for Ocean Observation. Sensors 2012, 12, 373–390. [Google Scholar] [CrossRef] [PubMed]
- Kumar, P.; Kumar, P.; Priyadarshini, P.; Srija. Underwater acoustic sensor network for early warning generation. In Proceedings of the 2012 Oceans, Hampton Roads, VI, USA, 14–19 October 2012; pp. 1–6. [Google Scholar]
- Manjula, R.; Manvi, S. Coverage optimization based sensor deployment by using PSO for anti-submarine detection in UWASNs. In Proceedings of the 2013 Ocean Electronics (SYMPOL), Kochi, India, 23–25 October 2013; pp. 15–22. [Google Scholar]
- Nain, M.; Goyal, N.; Zhou, R.; Cui, J.; Zhou, S. Localization Techniques in Underwater Wireless Sensor Network. In Proceedings of the 2021 International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, 4–5 March 2021; pp. 747–751. [Google Scholar]
- Awan, K.; Shah, P.; Iqbal, K.; Gillani, S.; Ahmad, W.; Nam, Y. Underwater Wireless Sensor Networks: A Review of Recent Issues and Challenges. Wirel. Commun. Mob. Comput. 2019, 2019, 20. [Google Scholar] [CrossRef]
- Mayberry, S.; Wang, J.; Tao, Q.; Zhang, F.; Song, A.; Hong, X.; Dong, S.; Webb, C.; Dugaev, D.; Peng, Z. First Step Towards UNet: Open-Access Aquatic Testbeds and Robotic Ecosystem. In Proceedings of the 15th International Conference on Underwater Networks & Systems, Shenzhen, China, 22–24 November 2022; Number 10 in WUWNet’21. pp. 1–8. [Google Scholar]
- Demirors, E.; Shi, J.; Guida, R.; Melodia, T. SEANet G2: Toward a High-Data-Rate Software-Defined Underwater Acoustic Networking Platform. In Proceedings of the 11th International Conference on Underwater Networks & Systems, Boston, MA, USA, 14–16 November 2016; Number 12 in WUWNet ’16. p. 8. [Google Scholar]
- Peng, Z.; Wei, L.; Wang, Z.; Want, L.; Zuba, M.; Cui, J.H.; Zhou, S.; Shi, Z.; O’Donnell, J. Ocean-TUNE UCONN testbed: A technology incubator for underwater communication and networking. In Proceedings of the 2014 Underwater Communications and Networking (UComms), Sestri Levante, Italy, 3–5 September 2014; pp. 1–4. [Google Scholar]
- Petrioli, C.; Petroccia, R.; Potter, J.R.; Spaccini, D. The SUNSET framework for simulation, emulation and at-sea testing of underwater wireless sensor networks. Hoc Netw. 2015, 34, 224–238. [Google Scholar] [CrossRef]
- Noh, Y.; Shin, S. Survey on MAC protocols in Underwater Acoustic Sensor Networks. In Proceedings of the 2014 14th International Symposium on Communications and Information Technologies (ISCIT), Incheon, Republic of Korea, 24–26 September 2014; pp. 80–84. [Google Scholar]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A Survey on MAC Protocols for Underwater Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Mazinani, S.; Yousefi, H.; Mirzaie, M. A Vector-Based Routing Protocol in Underwater Wireless Sensor Networks. Wirel. Pers. Commun. 2018, 100, 1569–1583. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, G.; Shao, Y.; Zhang, L. Improvement research of underwater sensor network routing protocol HHVBF. In Proceedings of the 11th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2015), Shanghai, China, 21–23 September 2015; pp. 1–6. [Google Scholar]
- Bisht, M.; Gupta , C.P. Distance energy based routing algorithm with priority handling for UWSN. arXiv 2013, arXiv:1310.2518. [Google Scholar]
- Coutinho, R.W.L.; Vieira, L.F.M.; Loureiro, A.A.F. DCR: Depth-Controlled Routing protocol for underwater sensor networks. In Proceedings of the 2013 IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 453–458. [Google Scholar]
- Kang, Y.; Su, Y.; Xu, Y. ACGSOR: Adaptive cooperation-based geographic segmented opportunistic routing for underwater acoustic sensor networks. Hoc Netw. 2023, 145, 103158. [Google Scholar] [CrossRef]
- Hussain, A.; Hussain, T.; Ullah, I.; Muminov, B.; Khan, M.Z.; Alfarraj, O.; Gafar, A. CR-NBEER: Cooperative-Relay Neighboring-Based Energy Efficient Routing Protocol for Marine Underwater Sensor Networks. J. Mar. Sci. Eng. 2023, 11, 1474. [Google Scholar] [CrossRef]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A Multi-Layer Cluster Based Energy Efficient Routing Scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Faheem, M.; Tuna, G.; Gungor, V.C. QERP: Quality-of-Service (QoS) Aware Evolutionary Routing Protocol for Underwater Wireless Sensor Networks. IEEE Syst. J. 2018, 12, 2066–2073. [Google Scholar] [CrossRef]
- Mukhtiar Ahmed, M.S.; Channa, M. CBE2R: Clustered-based energy efficient routing protocol for underwater wireless sensor network. Int. J. Electron. 2018, 105, 1916–1930. [Google Scholar] [CrossRef]
- Zhang, J.; Cai, M.; Han, G.; Qian, Y.; Shu, L. Cellular Clustering-Based Interference-Aware Data Transmission Protocol for Underwater Acoustic Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 3217–3230. [Google Scholar] [CrossRef]
- Le, S.N.; Peng, Z.; Cui, J.H.; Zhou, H.; Liaod, J. SeaLinx: A Multi-instance Protocol Stack Architecture for Underwater Networking. In Proceedings of the Eighth ACM International Conference on Underwater Networks and Systems, Kaohsiung, Taiwan, 11–13 November 2013; Number 46 in WUWNet ’13. p. 5. [Google Scholar]
- Pan, X.; Zhu, J.; Liu, M.; Wang, X.; Peng, Z.; Liu, J.; Cui, J. An On-Demand Scheduling-Based MAC Protocol for UW-WiFi Networks. J. Mar. Sci. Eng. 2023, 11, 765. [Google Scholar] [CrossRef]
- Islam, T.; Lee, Y.K. A Comprehensive Survey of Recent Routing Protocols for Underwater Acoustic Sensor Networks. Sensors 2019, 19, 4256. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Martínez, J.F.; Chaus, J.M.; Eckert, M. A Survey on Underwater Acoustic Sensor Network Routing Protocols. Sensors 2016, 16, 414. [Google Scholar] [CrossRef]
- Jiang, S. On Reliable Data Transfer in Underwater Acoustic Networks: A Survey from Networking Perspective. IEEE Commun. Surv. Tutor. 2018, 20, 1036–1055. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TX_MODE | Bytes/Block | Max_Blocks/Packet | Max_Bytes/Packet |
|---|---|---|---|
| 1 | 38 | 16 | 608 |
| 2 | 80 | 16 | 1280 |
| 3 | 122 | 16 | 1952 |
| 4 | 164 | 16 | 2624 |
| 5 | 248 | 16 | 3968 |
| TX_MODE | Total Data (B) | Time (s) | Throughput (bps) | Packet Loss Rate |
|---|---|---|---|---|
| 1 | 29,376 | 401 | 586.06 | 10.00% |
| 2 | 63,936 | 401 | 1275.53 | 10.00% |
| 3 | 38,304 | 228 | 1344.00 | 30.00% |
| 4 | 121,824 | 431 | 2261.23 | 21.67% |
| 5 | 174,240 | 432 | 3226.67 | 25.00% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Pan, X.; Peng, Z.; Liu, M.; Guo, J.; Cui, J.-H. uw-WiFi: Small-Scale Data Collection Network-Based Underwater Internet of Things. J. Mar. Sci. Eng. 2024, 12, 481. https://doi.org/10.3390/jmse12030481
Zhu J, Pan X, Peng Z, Liu M, Guo J, Cui J-H. uw-WiFi: Small-Scale Data Collection Network-Based Underwater Internet of Things. Journal of Marine Science and Engineering. 2024; 12(3):481. https://doi.org/10.3390/jmse12030481
Chicago/Turabian StyleZhu, Jifeng, Xiaohe Pan, Zheng Peng, Mengzhuo Liu, Jingqian Guo, and Jun-Hong Cui. 2024. "uw-WiFi: Small-Scale Data Collection Network-Based Underwater Internet of Things" Journal of Marine Science and Engineering 12, no. 3: 481. https://doi.org/10.3390/jmse12030481
APA StyleZhu, J., Pan, X., Peng, Z., Liu, M., Guo, J., & Cui, J. -H. (2024). uw-WiFi: Small-Scale Data Collection Network-Based Underwater Internet of Things. Journal of Marine Science and Engineering, 12(3), 481. https://doi.org/10.3390/jmse12030481