
Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Effect on Dynamic Response According to Inner Water Level


Abstract
:1. Introduction
2. Materials and Methods
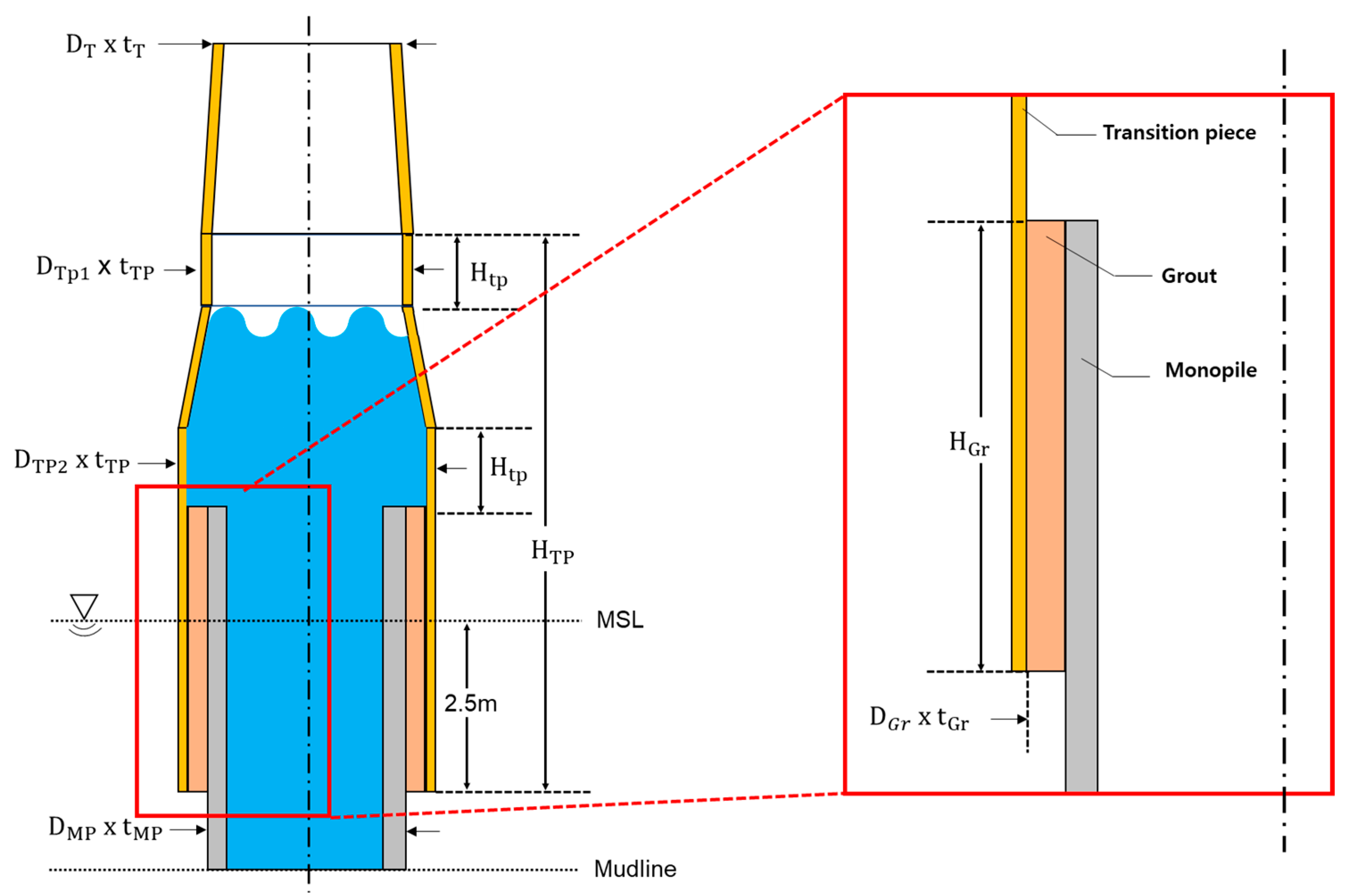
2.1. Closed-Form Equation of Eigen Problem of OWTs
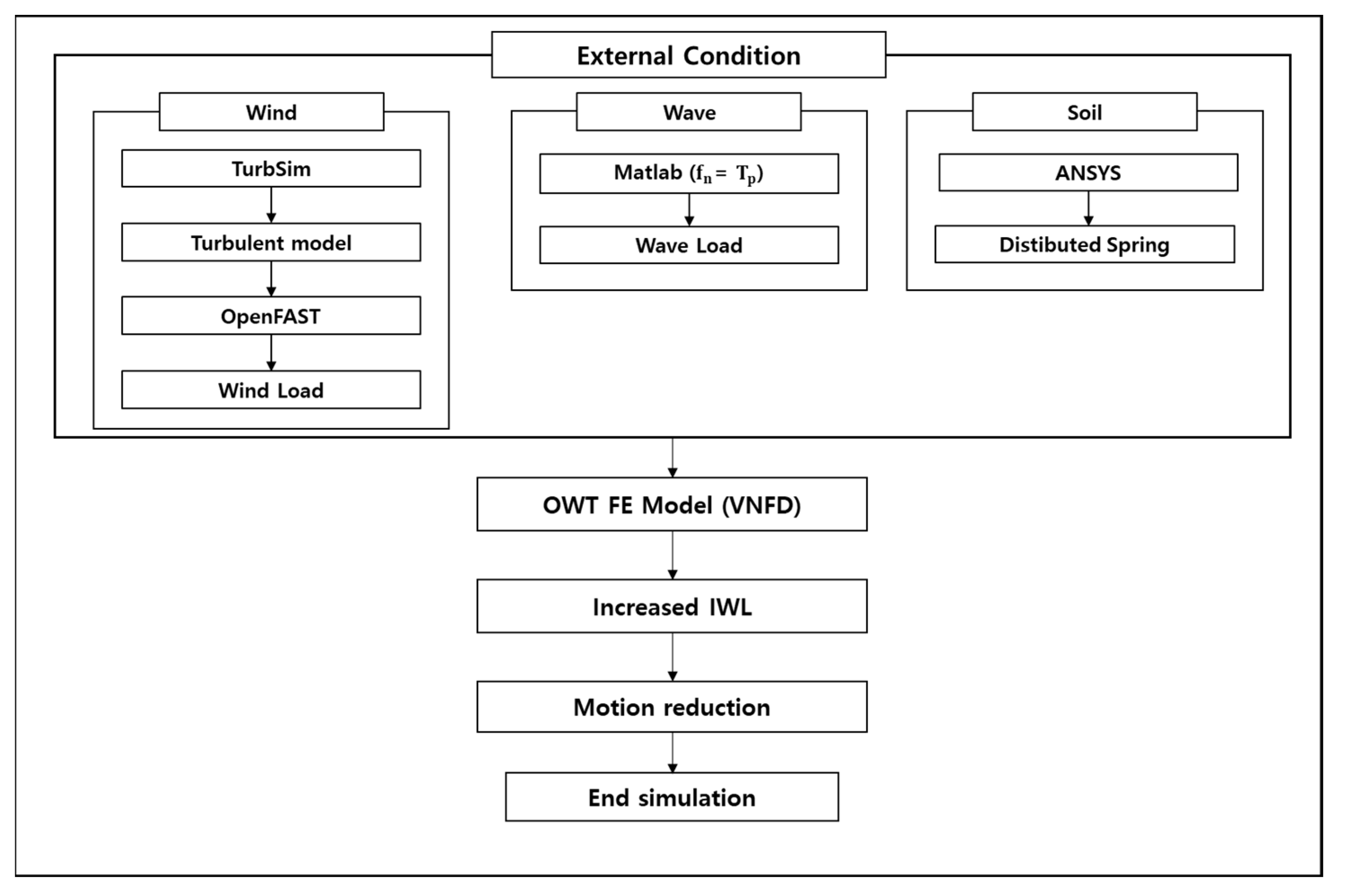
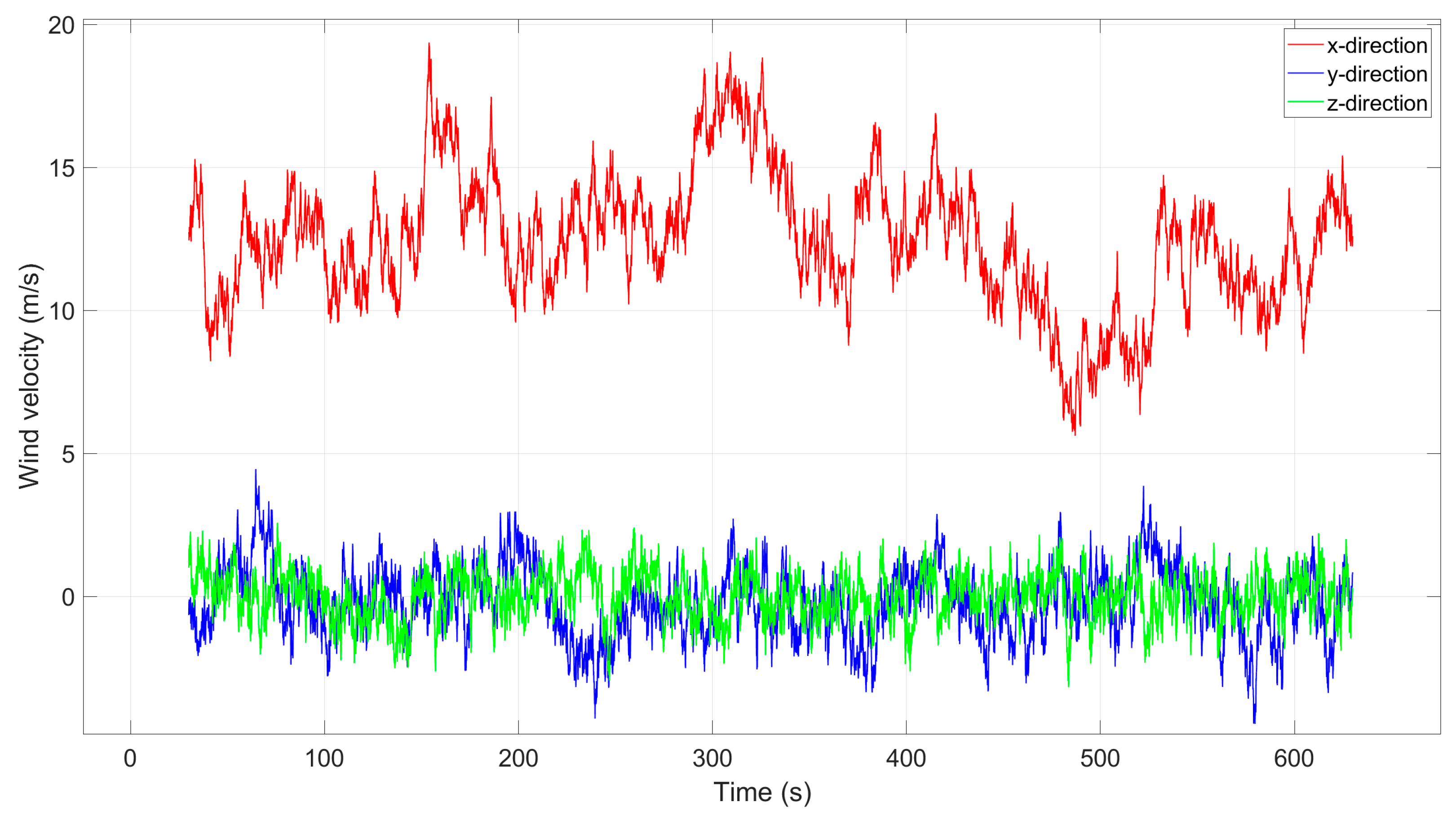
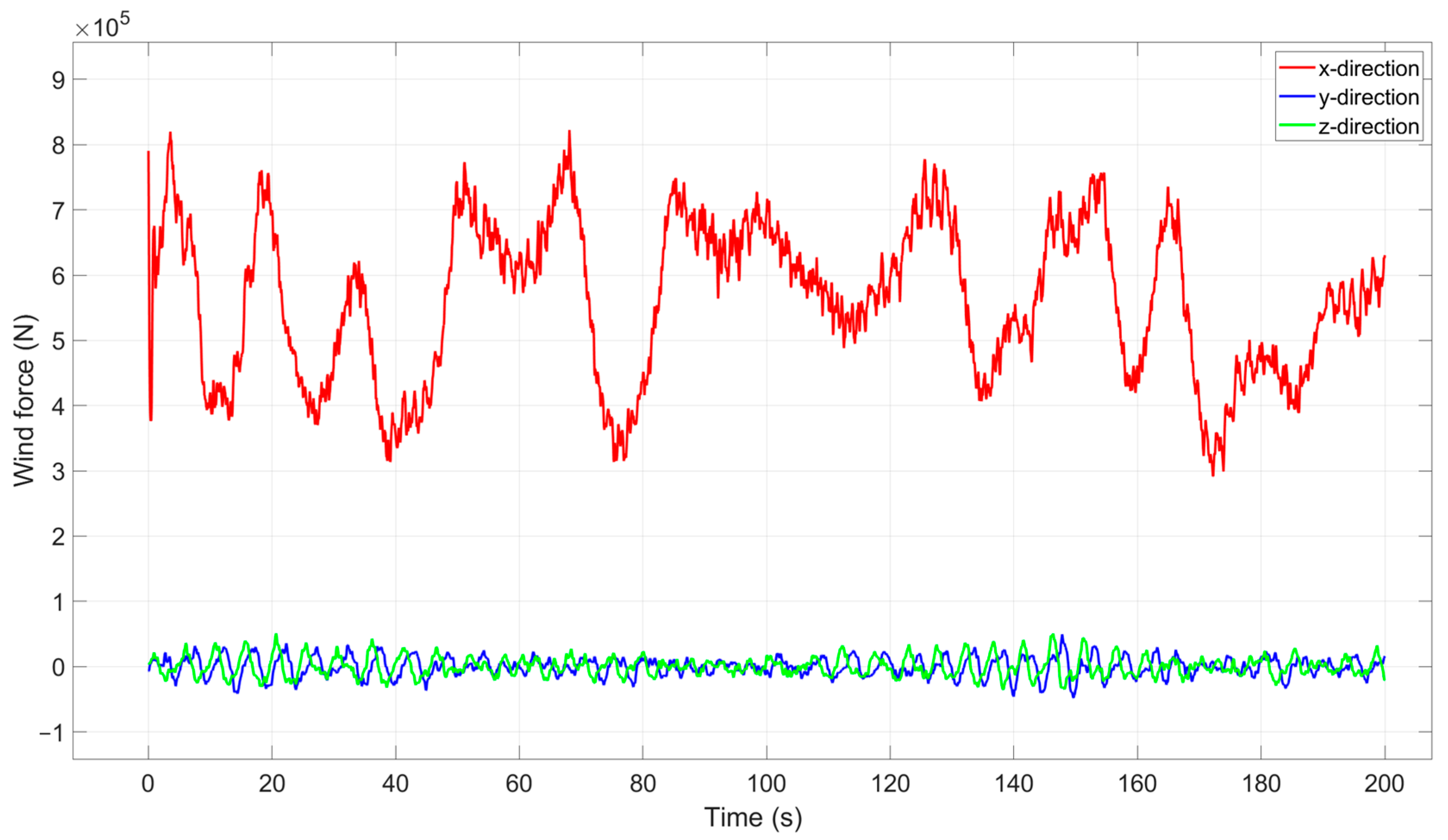
2.2. Wind Simulation
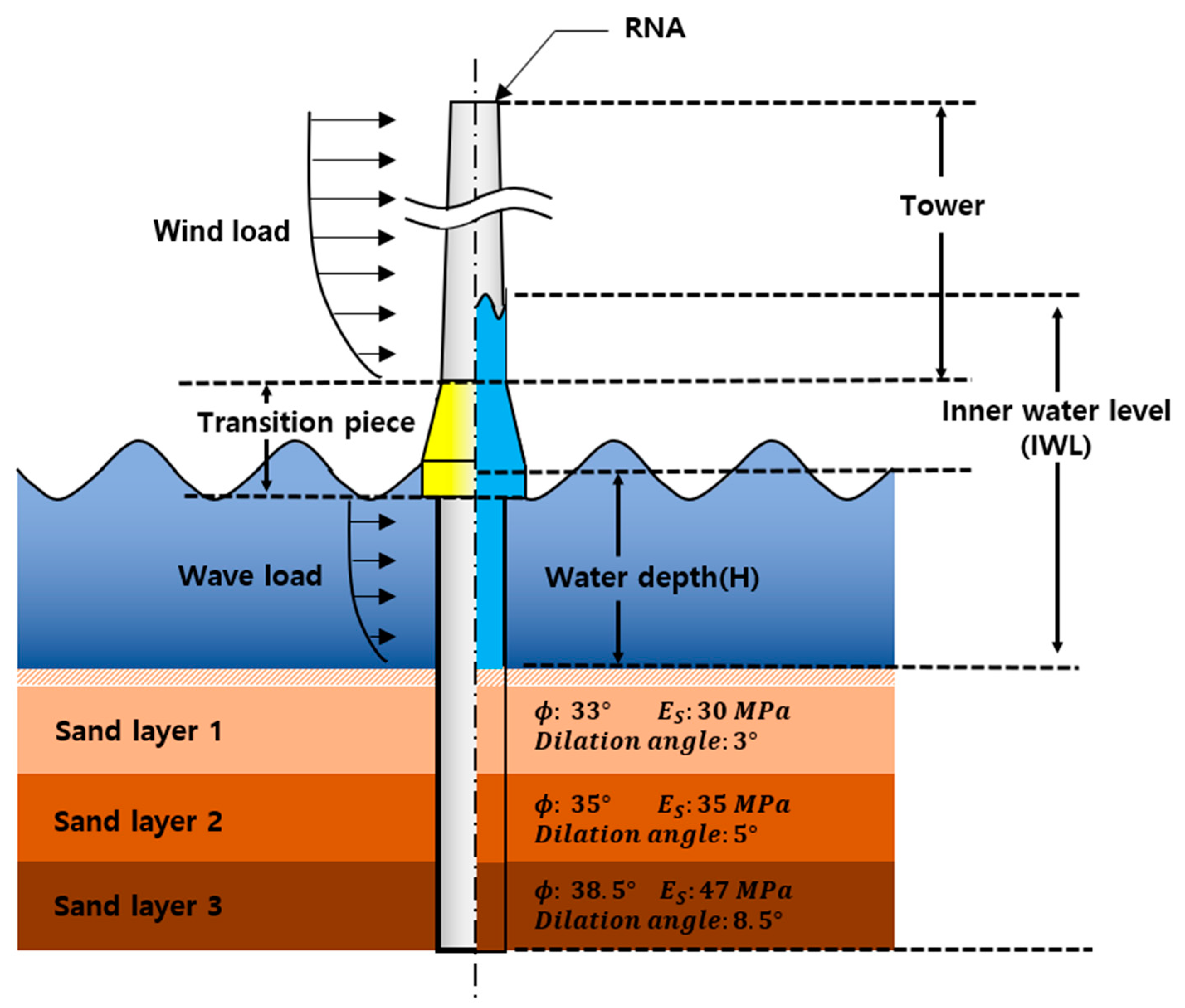
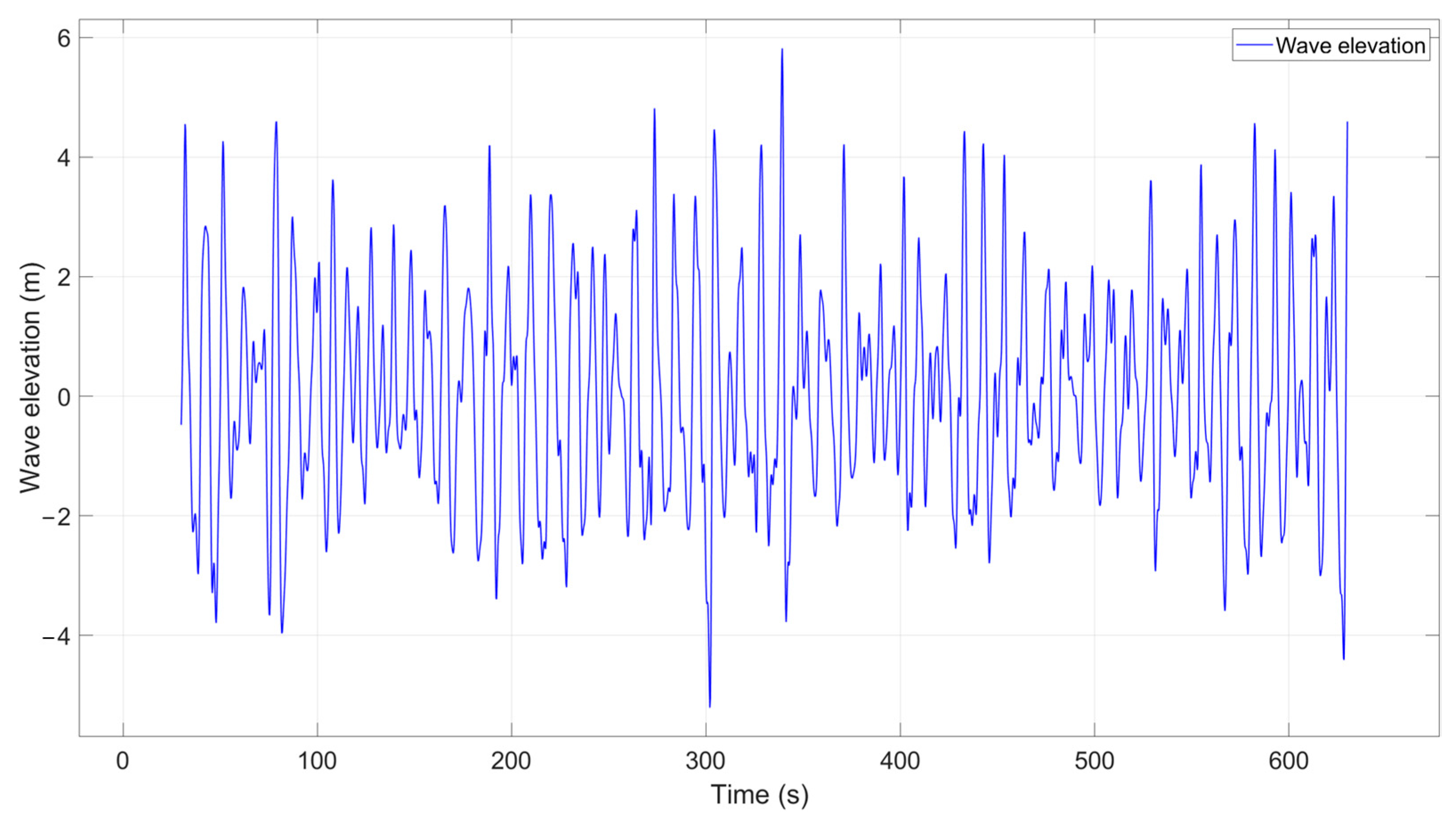
2.3. Wave Simulation
3. Simulation
3.1. Wind Turbine Model Description
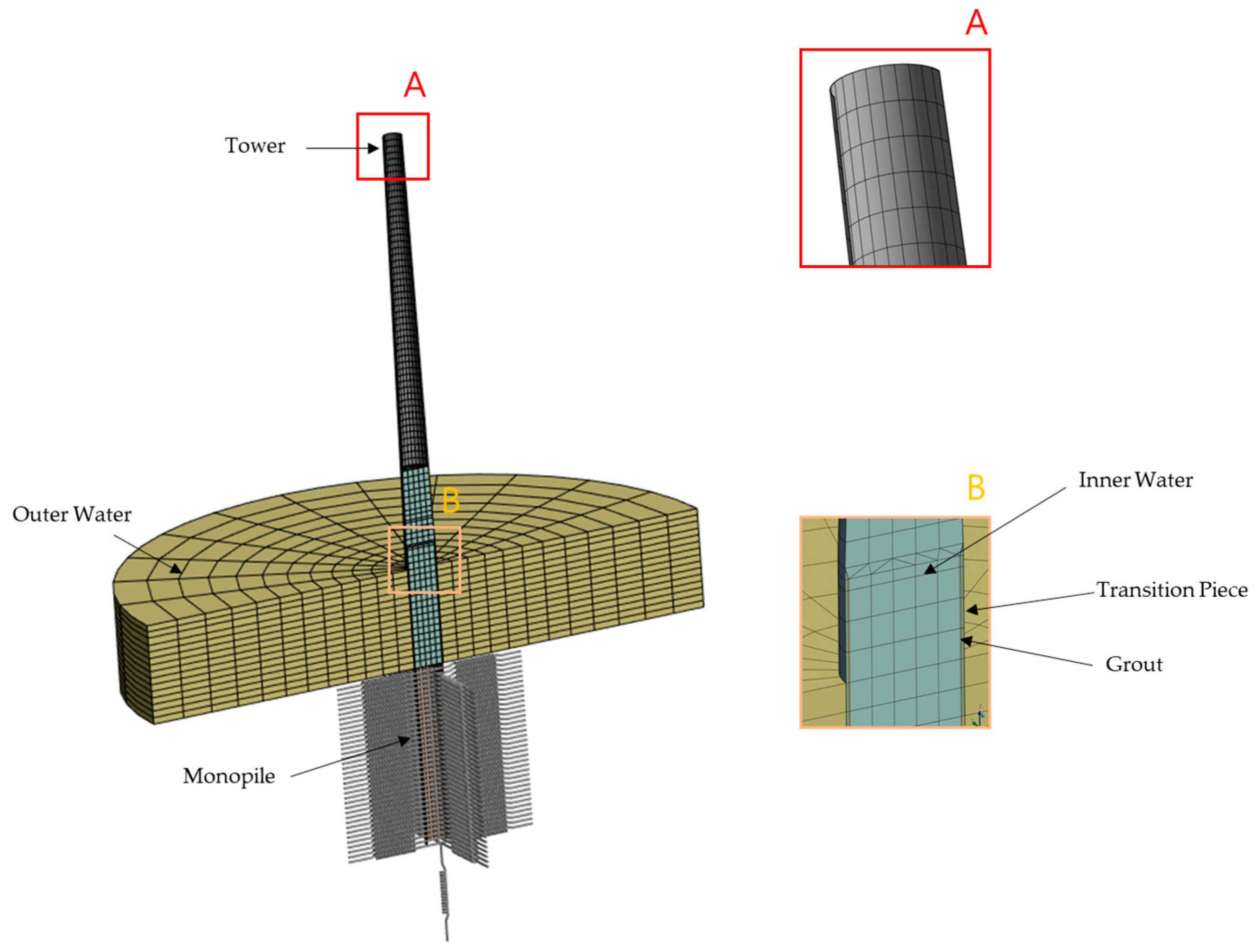
3.2. Setting Up the Analysis Model
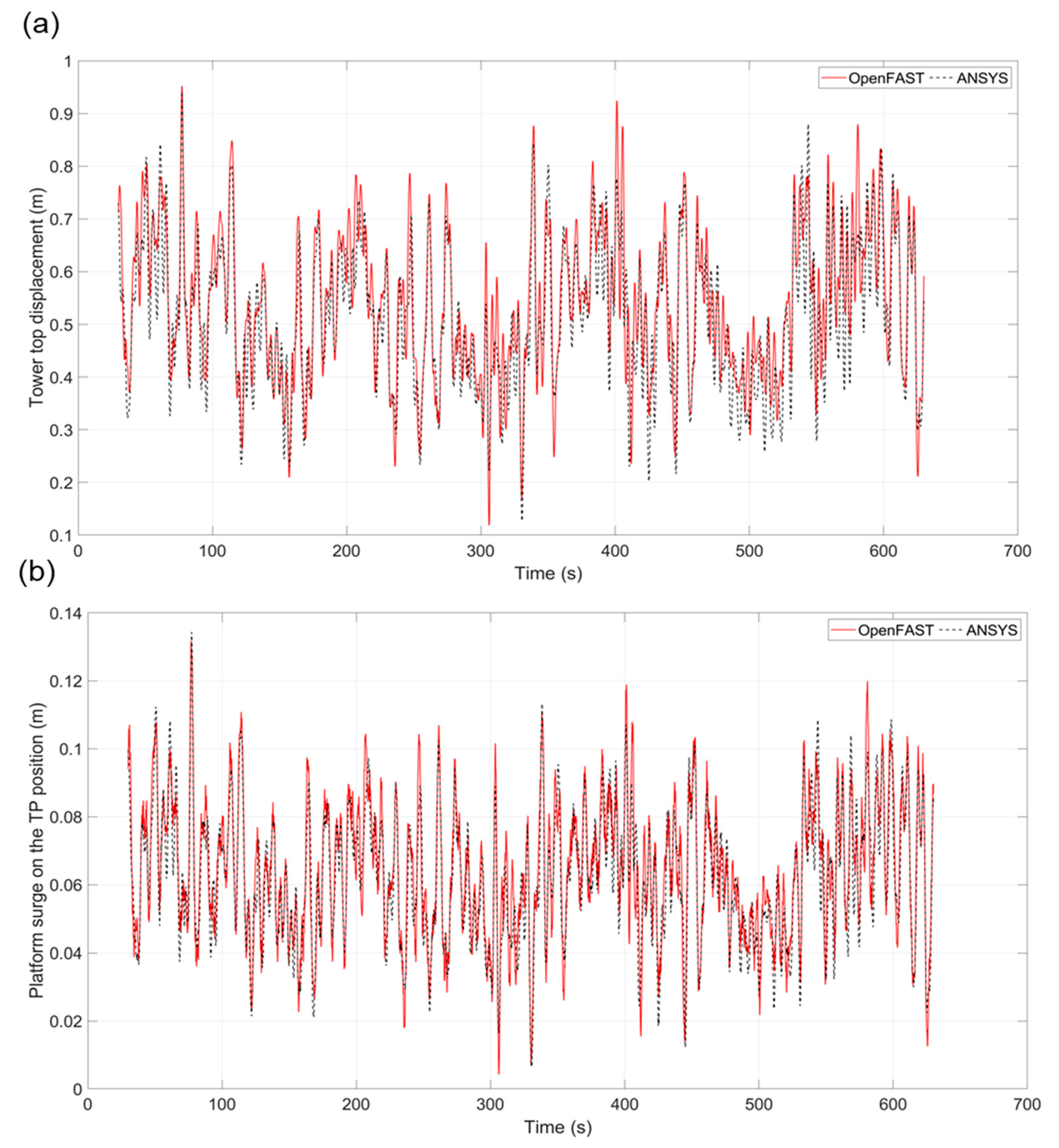
3.3. Verification of FE Model
4. Results and Discussions
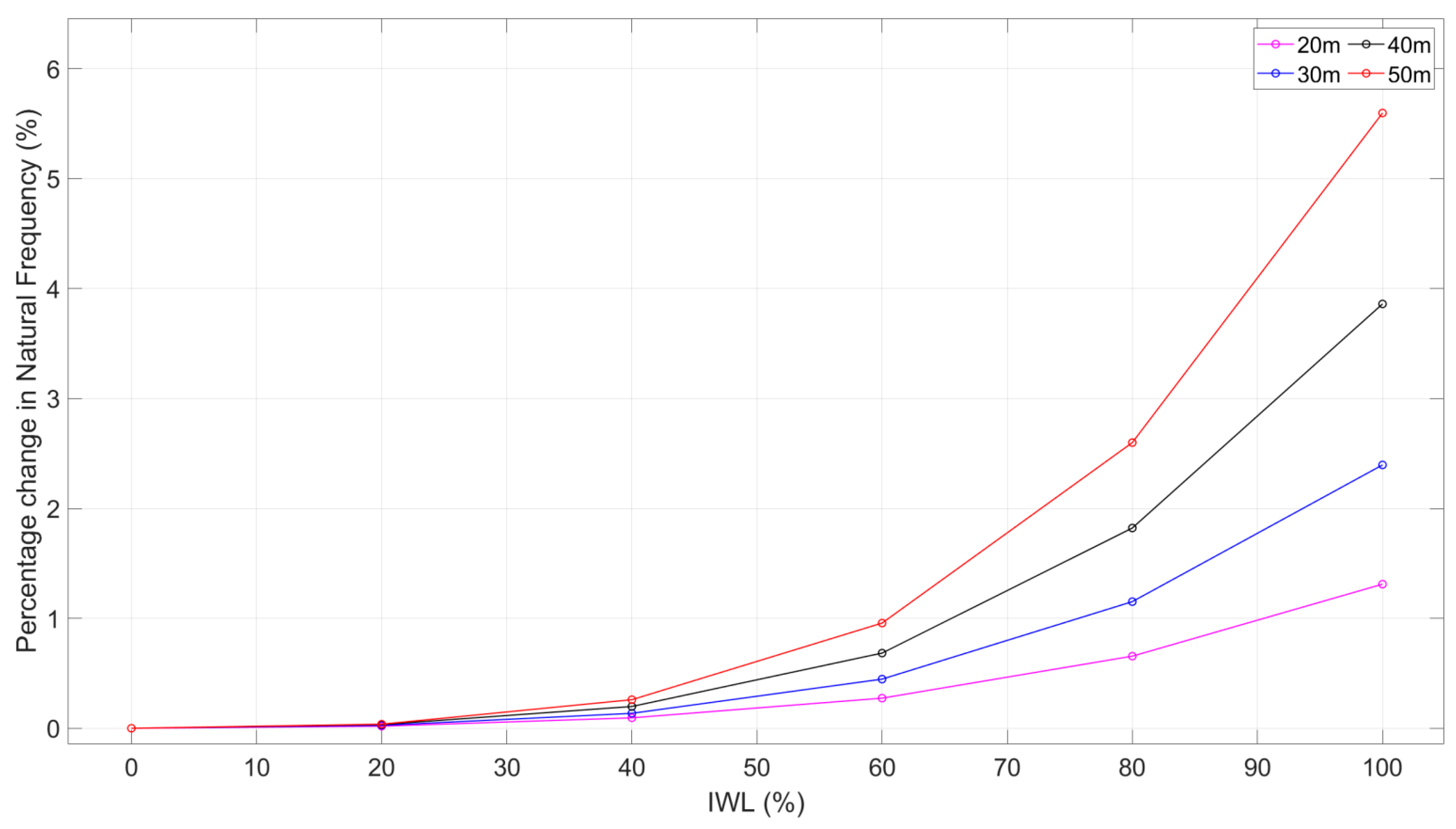
4.1. Changes in Natural Frequency with Inner Water Level
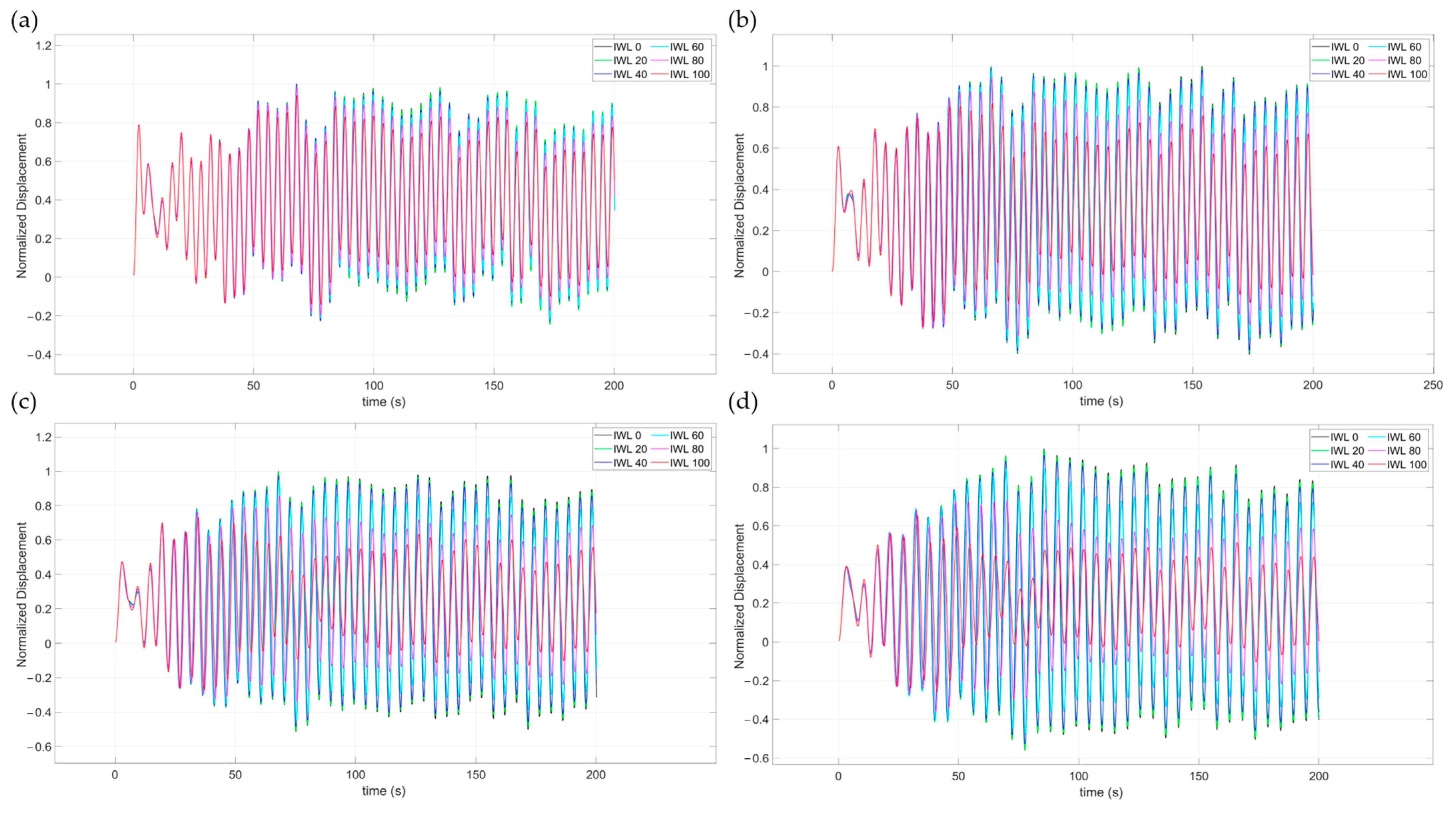
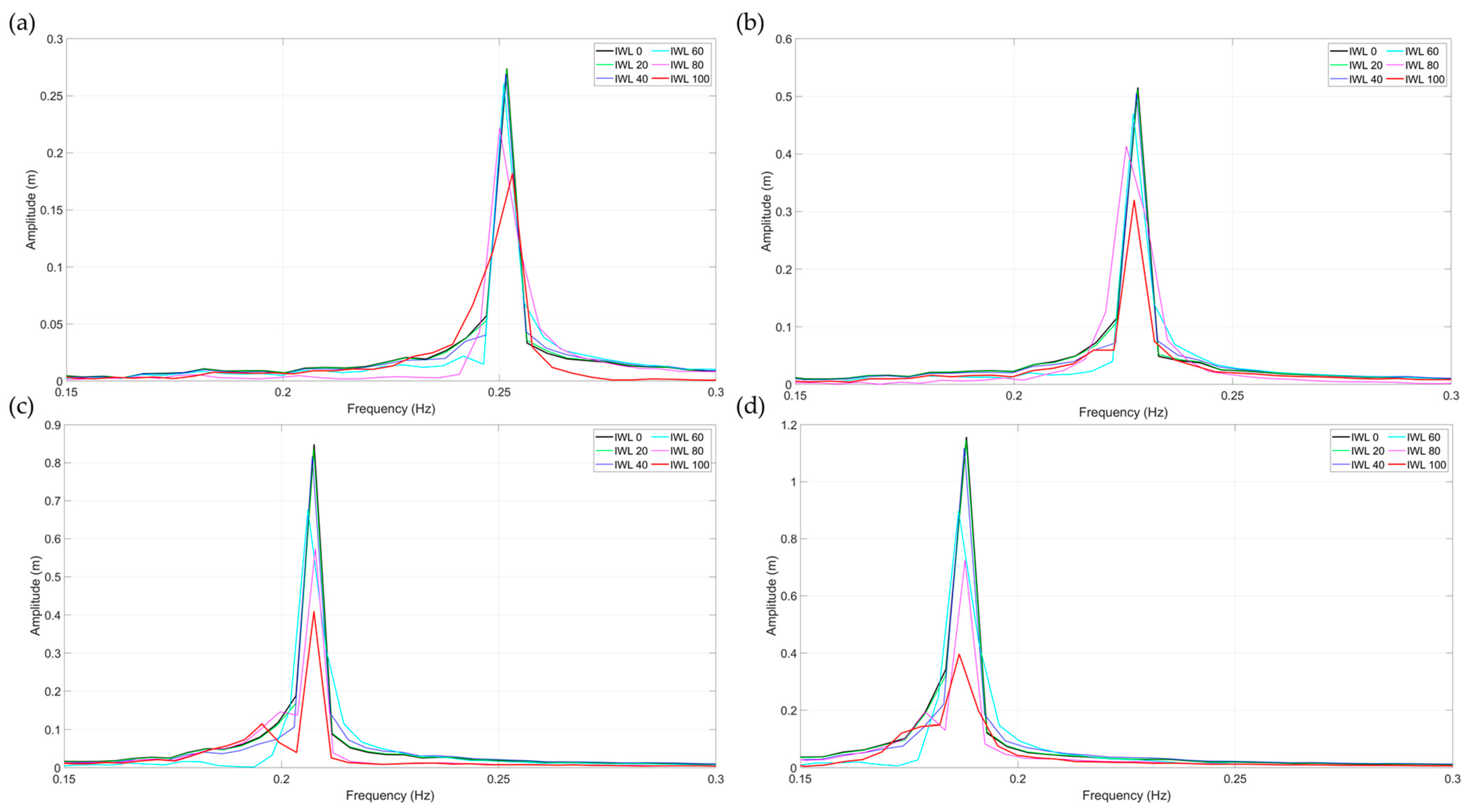
4.2. Reducing Dynamic Response to Changes in Natural Frequency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VNFD | Variable Natural Frequency Damper |
| OWT | Offshore Wind Turbine |
| TLCD | Tuned Liquid Column Damper |
| TMD | Tuned Mass Damper |
| ATMD | Actively Tuned Mass Damper |
| 3D FEA | three-dimensional Finite Element Analysis |
| FSI | Fluid Structure Interaction |
| IWL | Inner Water Level |
| NREL | National Renewable Energy Laboratory |
| MDOF | Multi-Degree-Of-Freedom |
| SDOF | Single-Degree-Of-Freedom |
| RNA | Rotor Nacelle Assembly |
| TP | Transition Piece |
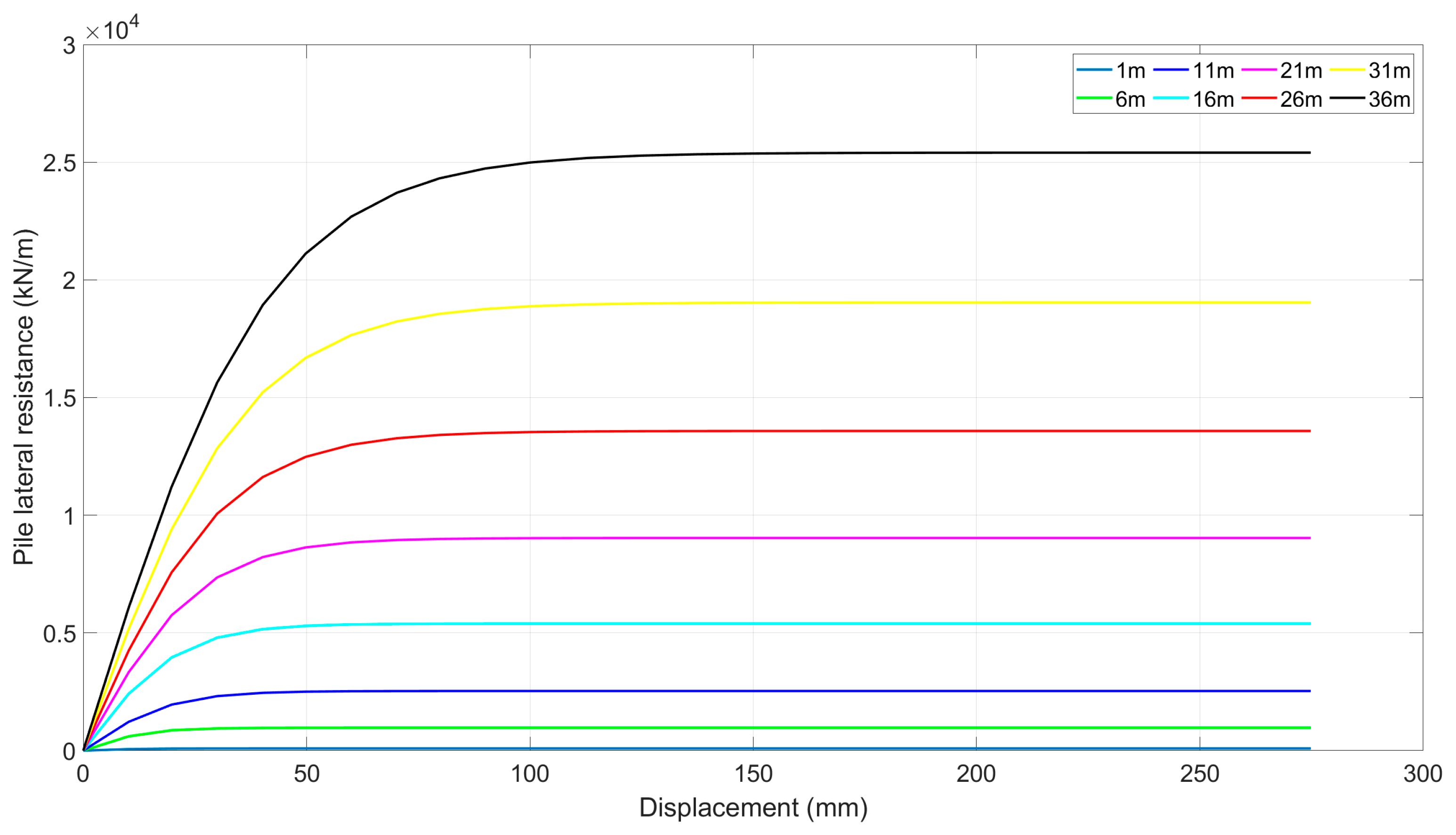
| SSI | Soil Structure Interaction |
| MSL | Mean Sea Level |
| CS | Coupled Spring |
| DS | Distributed Spring |
| FFT | Fast Fourier Transform |
Nomenclature
| natural frequency | |
| lateral stiffness of the tower | |
| Young’s modulus of the tower | |
| moment of inertia of the tower | |
| length of the tower | |
| mass equivalent ratio of the tower | |
| weight of the seawater in the monopile | |
| density of water | |
| distance from the mudline to the top of the monopile | |
| monopile diameter | |
| monopile thickness | |
| height of the TP | |
| spacing of tapered TP from the tower and monopile | |
| top radius of the TP | |
| bottom radius of the TP | |
| tower height at which seawater enters the tower | |
| top radius at which seawater enters the tower | |
| bottom radius at which seawater enters the tower | |
| weight of seawater in the TP | |
| weight of the seawater in the tower | |
| total weight of seawater inside the structure | |
| height of the grout | |
| grout diameter | |
| grout thickness | |
| inner seawater ratio | |
| equivalent mass ratio of water | |
| empirical coefficient | |
| center of gravity of the RNA | |
| center of gravity of the water | |
| depth from the baseline in meters | |
| natural frequency considering the added mass of the IWL | |
| lateral stiffness of the tapered tower considering the substructure | |
| mass of the tapered tower considering the substructure | |
| transverse stiffnesses | |
| rotational stiffnesses | |
| natural frequency of the structure (including inner water), obtained by reflecting the lateral and rotational stiffness of the foundation | |
| vectors of displacement amplitude | |
| vectors of force amplitude | |
| wind speed measured at time t at height | |
| turbulent wind speed | |
| wind speed at the hub height | |
| power law exponent | |
| spectral density of wind speed | |
| JONSWAP spectrum equation | |
| JONSWAP peakedness parameter | |
| inertial force | |
| drag force | |
| mass coefficient | |
| drag coefficient | |
| horizontal velocity of water | |
| horizontal acceleration of water | |
| profile of the sea surface | |
| depth of water | |
| effective unit weight of soil | |
| cohesion of soil | |
| effective friction angle of soil | |
| Poisson’s ratio of soil | |
| Young’s modulus of soil |
References
- Chen, D.; Huang, K.; Bretel, V.; Hou, L. Comparison of Structural Properties between Monopile and Tripod Offshore Wind-Turbine Support Structures. Adv. Mech. Eng. 2013, 5, 175684. [Google Scholar] [CrossRef]
- Devriendt, C.; Weijtjens, W.; El-Kafafy, M.; De Sitter, G. Monitoring Resonant Frequencies and Damping Values of an Offshore Wind Turbine in Parked Conditions. IET Renew. Power Gener. 2014, 8, 433–441. [Google Scholar] [CrossRef]
- DNVGL-ST-0126; Support Structures for Wind Turbines. DNV GL: Oslo, Norway, 2016.
- Ghosh, A.; Basu, B. Seismic Vibration Control of Short Period Structures Using the Liquid Column Damper. Eng. Struct. 2004, 26, 1905–1913. [Google Scholar] [CrossRef]
- Stewart, G.M.; Lackner, M.A. The Impact of Passive Tuned Mass Dampers and Wind–Wave Misalignment on Offshore Wind Turbine Loads. Eng. Struct. 2014, 73, 54–61. [Google Scholar] [CrossRef]
- Colwell, S.; Basu, B. Tuned Liquid Column Dampers in Offshore Wind Turbines for Structural Control. Eng. Struct. 2009, 31, 358–368. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Y.; Bai, X. Shaking Table Test and Numerical Analysis of Offshore Wind Turbine Tower Systems Controlled by Tlcd. Earthq. Eng. Eng. Vib. 2015, 14, 55–75. [Google Scholar] [CrossRef]
- Lackner, M.A.; Rotea, M.A. Passive Structural Control of Offshore Wind Turbines. Wind Energy 2011, 14, 373–388. [Google Scholar] [CrossRef]
- Lackner, M.A.; Rotea, M.A. Structural Control of Floating Wind Turbines. Mechatronics 2011, 21, 704–719. [Google Scholar] [CrossRef]
- Fitzgerald, B.; Basu, B. Cable Connected Active Tuned Mass Dampers for Control of in-Plane Vibrations of Wind Turbine Blades. J. Sound Vib. 2014, 333, 5980–6004. [Google Scholar] [CrossRef]
- Brodersen, M.L.; Bjørke, A.-S.; Høgsberg, J. Active Tuned Mass Damper for Damping of Offshore Wind Turbine Vibrations. Wind Energy 2017, 20, 783–796. [Google Scholar] [CrossRef]
- You, Y.-S.; Song, K.-Y.; Sun, M.-Y. Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Principle Verification through Analysis of Controllable Natural Frequencies. J. Mar. Sci. Eng. 2022, 10, 983. [Google Scholar] [CrossRef]
- Wang, L.; Quant, R.; Kolios, A. Fluid Structure Interaction Modelling of Horizontal-Axis Wind Turbine Blades Based on Cfd and Fea. J. Wind Eng. Ind. Aerodyn. 2016, 158, 11–25. [Google Scholar] [CrossRef]
- Gentils, T.; Wang, L.; Kolios, A. Integrated Structural Optimisation of Offshore Wind Turbine Support Structures Based on Finite Element Analysis and Genetic Algorithm. Appl. Energy 2017, 199, 187–204. [Google Scholar] [CrossRef]
- Li, B.; Shi, H.; Rong, K.; Geng, W.; Wu, Y. Fatigue Life Analysis of Offshore Wind Turbine under the Combined Wind and Wave Loadings Considering Full-Directional Wind Inflow. Ocean Eng. 2023, 281, 114719. [Google Scholar] [CrossRef]
- Wang, L.; Kolios, A.; Delafin, P.-L.; Nishino, T.; Bird, T. Fluid Structure Interaction Modelling of a Novel 10 mw Vertical-Axis Wind Turbine Rotor Based on Computational Fluid Dynamics and Finite Element Analysis. In Proceedings of the EWEA 2015 Annual Event, Paris, France, 17–20 November 2015. [Google Scholar]
- He, K.; Ye, J. Seismic Dynamics of Offshore Wind Turbine-Seabed Foundation: Insights from a Numerical Study. Renew. Energy 2023, 205, 200–221. [Google Scholar] [CrossRef]
- Chen, D.; Huang, S.; Huang, C.; Liu, R.; Ouyang, F. Passive Control of Jacket–Type Offshore Wind Turbine Vibrations by Single and Multiple Tuned Mass Dampers. Mar. Struct. 2021, 77, 102938. [Google Scholar] [CrossRef]
- Jonkman, J.M.; Buhl, M.L. Fast User’s Guide; National Renewable Energy Laboratory: Golden, CO, USA, 2005; Volume 365. [Google Scholar]
- Prendergast, L.J.; Gavin, K.; Doherty, P. An Investigation into the Effect of Scour on the Natural Frequency of an Offshore Wind Turbine. Ocean Eng. 2015, 101, 1–11. [Google Scholar] [CrossRef]
- van der Tempel, J.; Molenaar, D.-P. Wind Turbine Structural Dynamics–a Review of the Principles for Modern Power Generation, Onshore and Offshore. Wind Eng. 2002, 26, 211–222. [Google Scholar] [CrossRef]
- Ko, Y.-Y. A Simplified Structural Model for Monopile-Supported Offshore Wind Turbines with Tapered Towers. Renew. Energy 2020, 156, 777–790. [Google Scholar] [CrossRef]
- Kramer, S.L. Geotechnical Earthquake Engineering; Pearson Education India: Chennai, India, 1996. [Google Scholar]
- Jonkman, B.J. Turbsim User’s Guide: Version 1.50; NREL/TP-500-46198; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Taylor, G.I. The Spectrum of Turbulence. Proceedings of the Royal Society of London. Ser. A Math. Phys. Sci. 1938, 164, 476–490. [Google Scholar]
- Xu, X.; Wang, F.; Gaidai, O.; Naess, A.; Xing, Y.; Wang, J. Bivariate Statistics of Floating Offshore Wind Turbine Dynamic Response under Operational Conditions. Ocean Eng. 2022, 257, 111657. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Wyngaard, J.C.J.; Izumi, Y.; Coté, O.R. Spectral Characteristics of Surface—Layer Turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar]
- IEC61400-1; Wind Turbines—Part 1: Design Requirements. International Electrotechnical Commission: Geneva, Switzerland, 2005.
- Pierson, W.J., Jr.; Lionel, M. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of Sa Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, A.; Hasselmann, D.E.; Kruseman, P. Measurements of Wind-Wave Growth and Swell Decay During the Joint North Sea Wave Project (Jonswap); Ergaenzungsheft zur Deutschen Hydrographischen Zeitschrift, Reihe A; Deutches Hydrographisches Institut: Hamburg, Germany, 1973. [Google Scholar]
- DNV-OS-J101; Design of Offshore Wind Turbine Structures. DNV: Copenhagen, Denmark, 2014.
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993; Volume 1. [Google Scholar]
- Wilson, J.F. Dynamics of Offshore Structures; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Wang, Z.-K.; Tsai, G.-C.; Chen, Y.-B. One-Way Fluid-Structure Interaction Simulation of an Offshore Wind Turbine. Int. J. Eng. Technol. Innov. 2014, 4, 127–137. [Google Scholar]
- Jonkman, J.; Musial, W. Offshore Code Comparison Collaboration (Oc3) for Iea Wind Task 23 Offshore Wind Technology and Deployment; National Renewable Energy Laboratory: Golden, CO, USA, 2010. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-Mw Reference Wind Turbine for Offshore System Development; National Renewable Energy Laboratory: Golden, CO, USA, 2009. [Google Scholar]
- Shi, S.; Zhai, E.; Xu, C.; Iqbal, K.; Sun, Y.; Wang, S. Influence of Pile-Soil Interaction on Dynamic Properties and Response of Offshore Wind Turbine with Monopile Foundation in Sand Site. Appl. Ocean Res. 2022, 126, 103279. [Google Scholar] [CrossRef]
- Jung, S.; Kim, S.-R.; Patil, A. Effect of Monopile Foundation Modeling on the Structural Response of a 5-Mw Offshore Wind Turbine Tower. Ocean Eng. 2015, 109, 479–488. [Google Scholar] [CrossRef]
- Shi, W.; Park, H.-C.; Baek, J.-H.; Kim, C.-W.; Kim, Y.-C.; Shin, H.-K. Study on the Marine Growth Effect on the Dynamic Response of Offshore Wind Turbines. Int. J. Precis. Eng. Manuf. 2012, 13, 1167–1176. [Google Scholar] [CrossRef]
- Zaaijer, M.B. Foundation Modelling to Assess Dynamic Behaviour of Offshore Wind Turbines. Appl. Ocean Res. 2006, 28, 45–57. [Google Scholar] [CrossRef]
- Digre, K.A.; Zwerneman, F. Insights into Using the 22nd Edition of Api Rp 2a Recommended Practice for Planning, Designing and Constructing Fixed Offshore Platforms-Working Stress Design. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012. [Google Scholar]
- Feyzollahzadeh, M.; Mahmoodi, M.J.; Yadavar-Nikravesh, S.M.; Jamali, J. Wind Load Response of Offshore Wind Turbine Towers with Fixed Monopile Platform. J. Wind Eng. Ind. Aerodyn. 2016, 158, 122–138. [Google Scholar] [CrossRef]
- Vieira, M.; Viana, M.; Henriques, E.; Reis, L. Soil Interaction and Grout Behavior for the Nrel Reference Monopile Offshore Wind Turbine. J. Mar. Sci. Eng. 2020, 8, 298. [Google Scholar] [CrossRef]
- API. API RP 2GEO: Geotechnical and Foundation Design Considerations; API: Washington, DC, USA, 2014. [Google Scholar]
- Hemmati, A.; Oterkus, E.; Barltrop, N. Fragility Reduction of Offshore Wind Turbines Using Tuned Liquid Column Dampers. Soil Dyn. Earthq. Eng. 2019, 125, 105705. [Google Scholar] [CrossRef]
- Sun, C.; Jahangiri, V. Fatigue Damage Mitigation of Offshore Wind Turbines under Real Wind and Wave Conditions. Eng. Struct. 2019, 178, 472–483. [Google Scholar] [CrossRef]
- Baniotopoulos, C.; Borri, C.; Stathopoulos, T. Environmental Wind Engineering and Design of Wind Energy Structures; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011; Volume 531. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | |
|---|---|
| Rated power () | 5 |
| Rotor diameter () | 126 |
| Rated wind speed () | 11.4 |
| Hub height () | 90 |
| Total mass of tower () | 347.460 |
| Outer diameter of tower top () | 3.87 |
| Thickness of tower top () | 0.019 |
| Outer diameter of tower bottom () | 6.0 |
| Thickness of tower bottom () | 0.027 |
| Tower height () | 87.6 |
| Total weight of RNA () | 350 |
| Pile thickness () | 60 |
| Grout thickness () | 125 |
| Grout diameter () | 6.25 |
| Grout height () | 7.0 |
| Transition piece thickness () | 30 |
| Transition piece diameter () | 6.31 |
| Transition piece height () | 12.5 |
| Properties | Material | |
|---|---|---|
| Steel [36] | Grout [14] | |
| Young’s modulus, () | 210 | 70 |
| ) | 8500 | 2740 |
| Poisson’ (-) | 0.38 | 0.19 |
| Number of Elements | Natural Frequency () | Diff (%) |
|---|---|---|
| 8472 | 0.2488 | 0 |
| 9144 | 0.24885 | 0.02 |
| 11,076 | 0.24889 | 0.02 |
| 14,768 | 0.2491 | 0.08 |
| 22,152 | 0.2492 | 0.04 |
| 37,824 | 0.24918 | −0.01 |
| 45,116 | 0.24924 | 0.02 |
| Model | Natural Frequency () | Relative Difference (%) | ||
|---|---|---|---|---|
| 1st Fore–Aft | 1st Side-to-Side | 1st Fore–Aft | 1st Side-to-Side | |
| Rigid base (present) | 0.3242 | 0.3247 | - | - |
| Rigid base [22] | 0.3132 | 0.3132 | 3.39 | 3.54 |
| Flexible foundation (present) | 0.2509 | 0.2512 | - | - |
| Flexible foundation [38] | 0.2410 | 0.2420 | 3.95 | 3.65 |
| Tower Top Displacement () | Platform Surge on TP () | |||||
|---|---|---|---|---|---|---|
| OpenFAST | ANSYS | Diff () | OpenFAST | ANSYS | Diff (%) | |
| Max | 0.952 | 0.941 | 1.15 | 0.132 | 0.134 | −1.91 |
| Mean | 0.537 | 0.512 | 4.65 | 0.064 | 0.062 | 2.96 |
| Std | 0.139 | 0.134 | 3.42 | 0.020 | 0.019 | 3.29 |
| Water Depth () | () | Simulation Result () | Difference (%) |
|---|---|---|---|
| 20 | 0.2662 | 0.2517 | 5.46 |
| 30 | 0.2447 | 0.2283 | 6.69 |
| 40 | 0.2241 | 0.2075 | 7.42 |
| 50 | 0.2048 | 0.1882 | 8.09 |
| IWL (%) | Water Depth () | |||
|---|---|---|---|---|
| 20 | 30 | 40 | 50 | |
| 0 | 0.2517 | 0.2283 | 0.2075 | 0.1882 |
| 20 | 0.2516 | 0.2282 | 0.2074 | 0.1881 |
| 40 | 0.2514 | 0.2280 | 0.2071 | 0.1877 |
| 60 | 0.2510 | 0.2273 | 0.2061 | 0.1864 |
| 80 | 0.2500 | 0.2257 | 0.2037 | 0.1833 |
| 100 | 0.2484 | 0.2228 | 0.1995 | 0.1776 |
| IWL (%) | Water Depth () | |||
|---|---|---|---|---|
| 20 | 30 | 40 | 50 | |
| 0 | - | - | - | - |
| 20 | 0.019 | 0.026 | 0.034 | 0.037 |
| 40 | 0.095 | 0.136 | 0.198 | 0.260 |
| 60 | 0.274 | 0.447 | 0.684 | 0.957 |
| 80 | 0.656 | 1.152 | 1.822 | 2.599 |
| 100 | 1.311 | 2.396 | 3.860 | 5.596 |
| Water Depth () | Natural Frequency () | Wave Period () |
|---|---|---|
| 20 | 0.2517 | 3.97 |
| 30 | 0.2283 | 4.38 |
| 40 | 0.2075 | 4.82 |
| 50 | 0.1881 | 5.31 |
| IWL (%) | Depth () | |||
|---|---|---|---|---|
| 20 | 30 | 40 | 50 | |
| 0 | - | - | - | - |
| 20 | −0.007 | 0.648 | 1.295 | 0.721 |
| 40 | 1.598 | 1.028 | 2.404 | 2.512 |
| 60 | 3.065 | 7.073 | 17.041 | 19.801 |
| 80 | 14.962 | 12.101 | 15.245 | 19.341 |
| 100 | 18.098 | 22.711 | 28.743 | 45.276 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.-J.; You, Y.-S.; Sun, M.-Y. Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Effect on Dynamic Response According to Inner Water Level. J. Mar. Sci. Eng. 2024, 12, 491. https://doi.org/10.3390/jmse12030491
Kim D-J, You Y-S, Sun M-Y. Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Effect on Dynamic Response According to Inner Water Level. Journal of Marine Science and Engineering. 2024; 12(3):491. https://doi.org/10.3390/jmse12030491
Chicago/Turabian StyleKim, Dong-Ju, Young-Suk You, and Min-Young Sun. 2024. "Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Effect on Dynamic Response According to Inner Water Level" Journal of Marine Science and Engineering 12, no. 3: 491. https://doi.org/10.3390/jmse12030491
APA StyleKim, D. -J., You, Y. -S., & Sun, M. -Y. (2024). Variable Natural Frequency Damper for Minimizing Response of Offshore Wind Turbine: Effect on Dynamic Response According to Inner Water Level. Journal of Marine Science and Engineering, 12(3), 491. https://doi.org/10.3390/jmse12030491