Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching


Abstract
:1. Introduction
2. Methodology
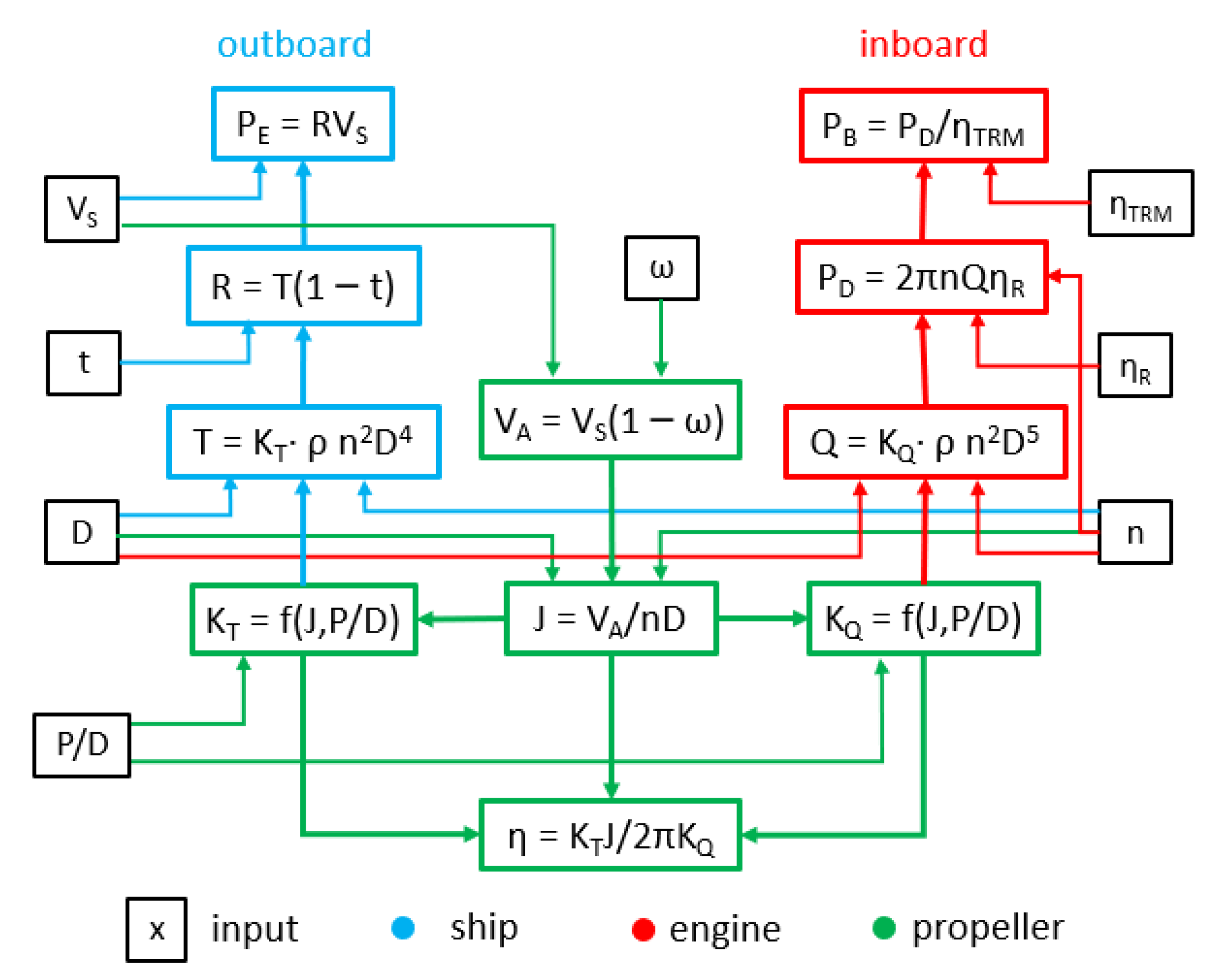
2.1. Basic Principles of Ship–Engine–Propeller Matching
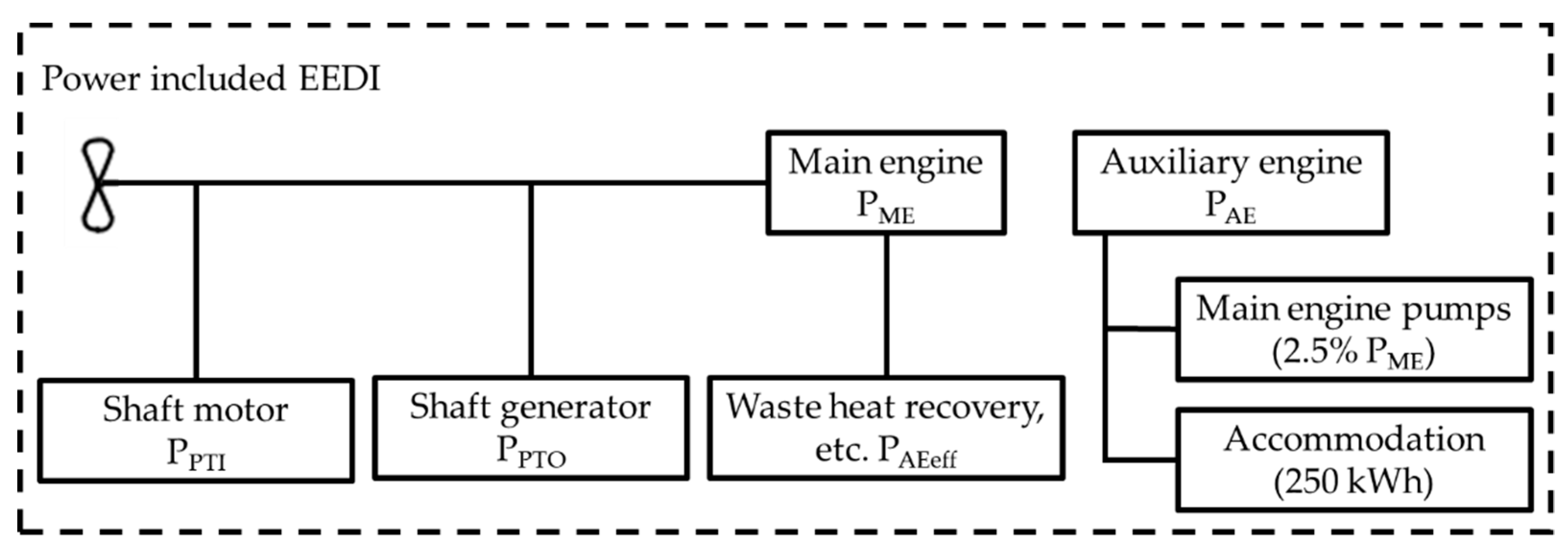
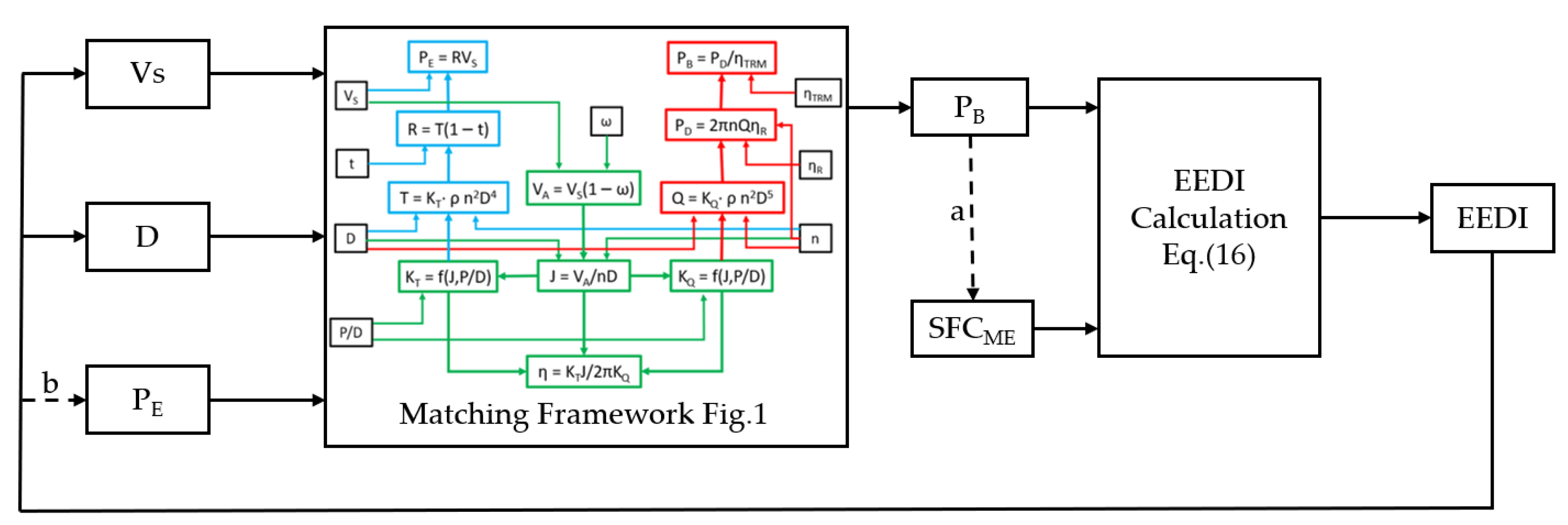
2.2. Basic Theory of EEDI
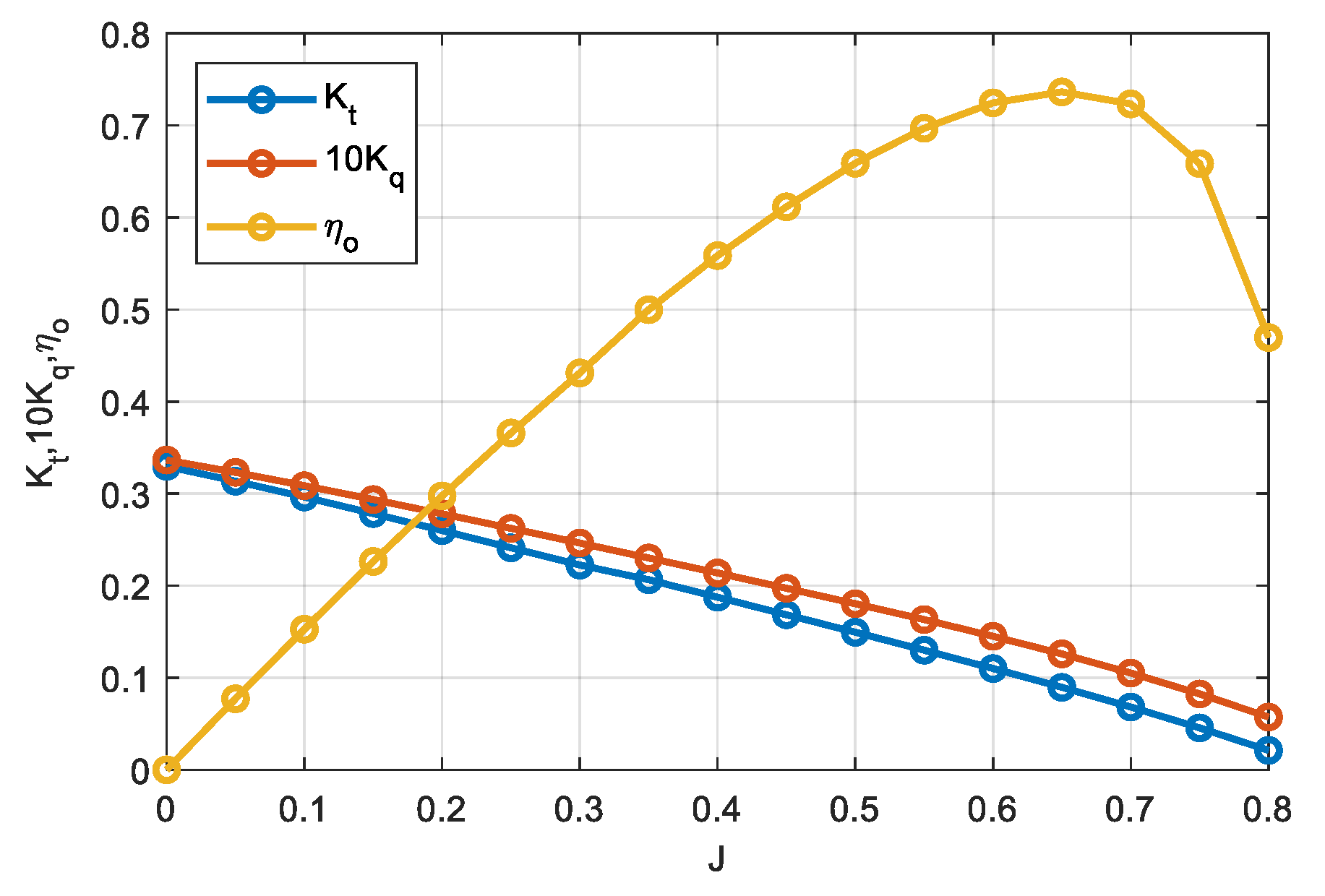
2.3. Relationship between EEDI and the Propeller Open Water Efficiency in Matching
3. Results and Analysis
3.1. The Ship Bench Mark
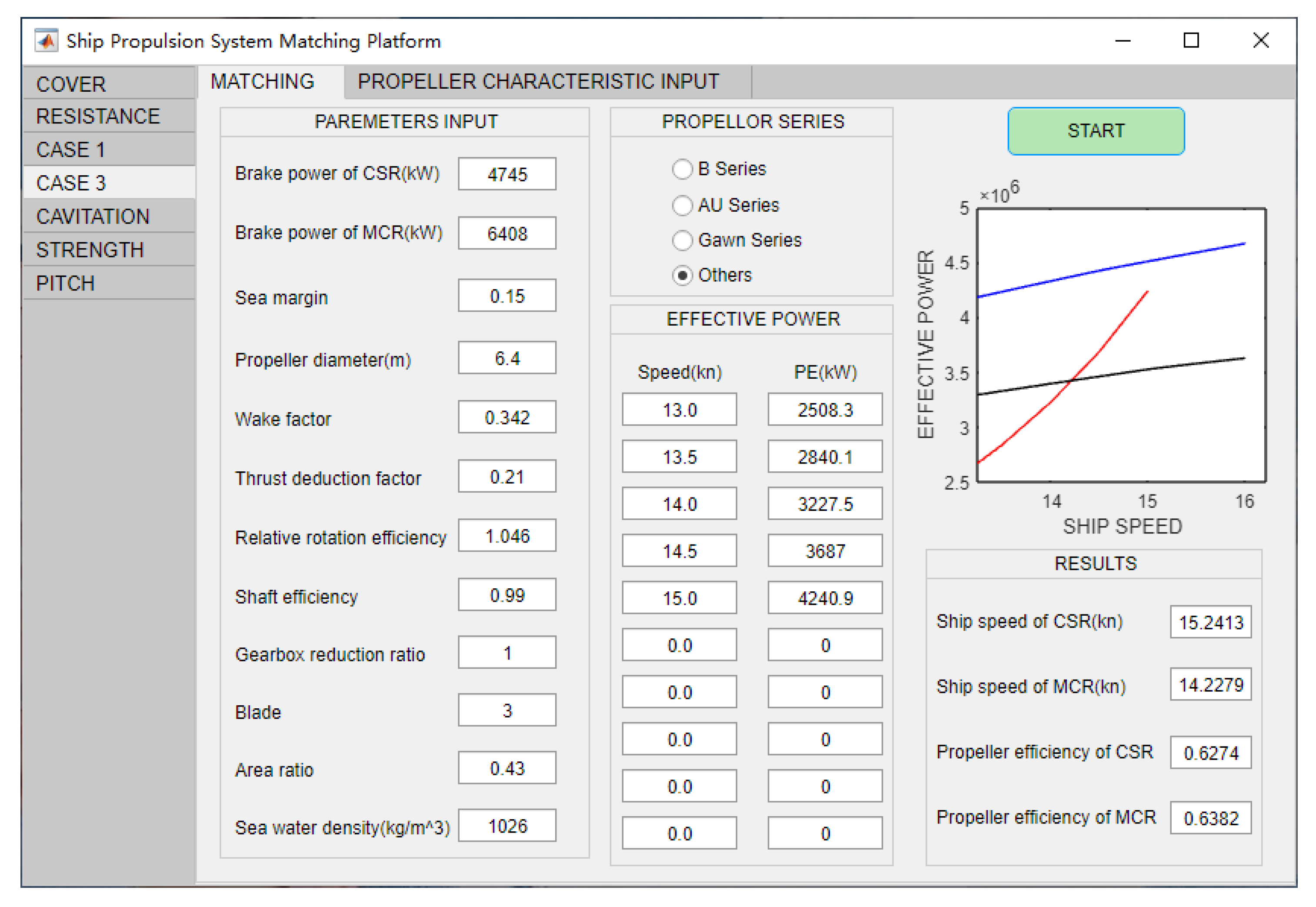
3.2. Results of Ship–Engine–Propeller Matching
3.3. Results of EEDI Calculation
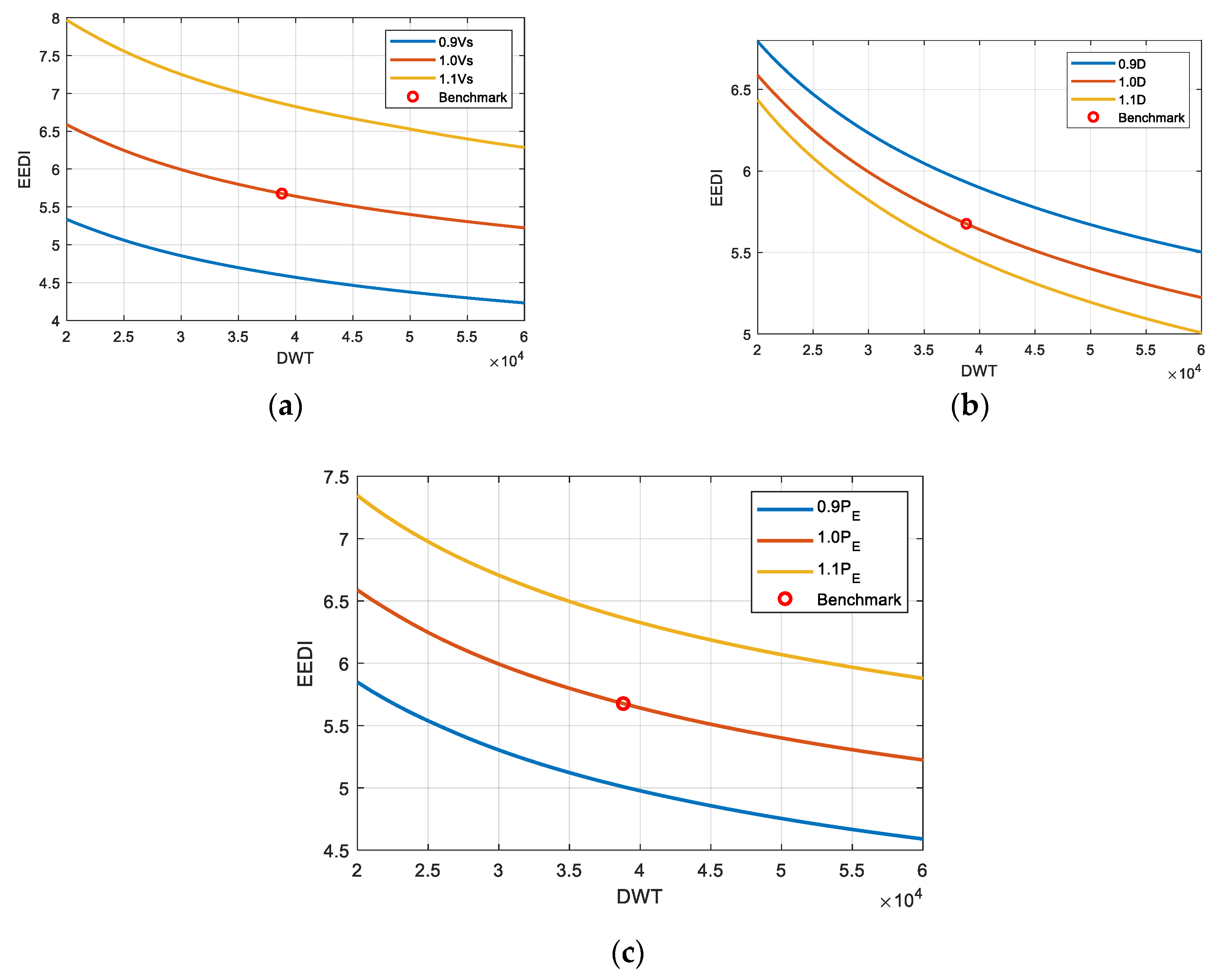
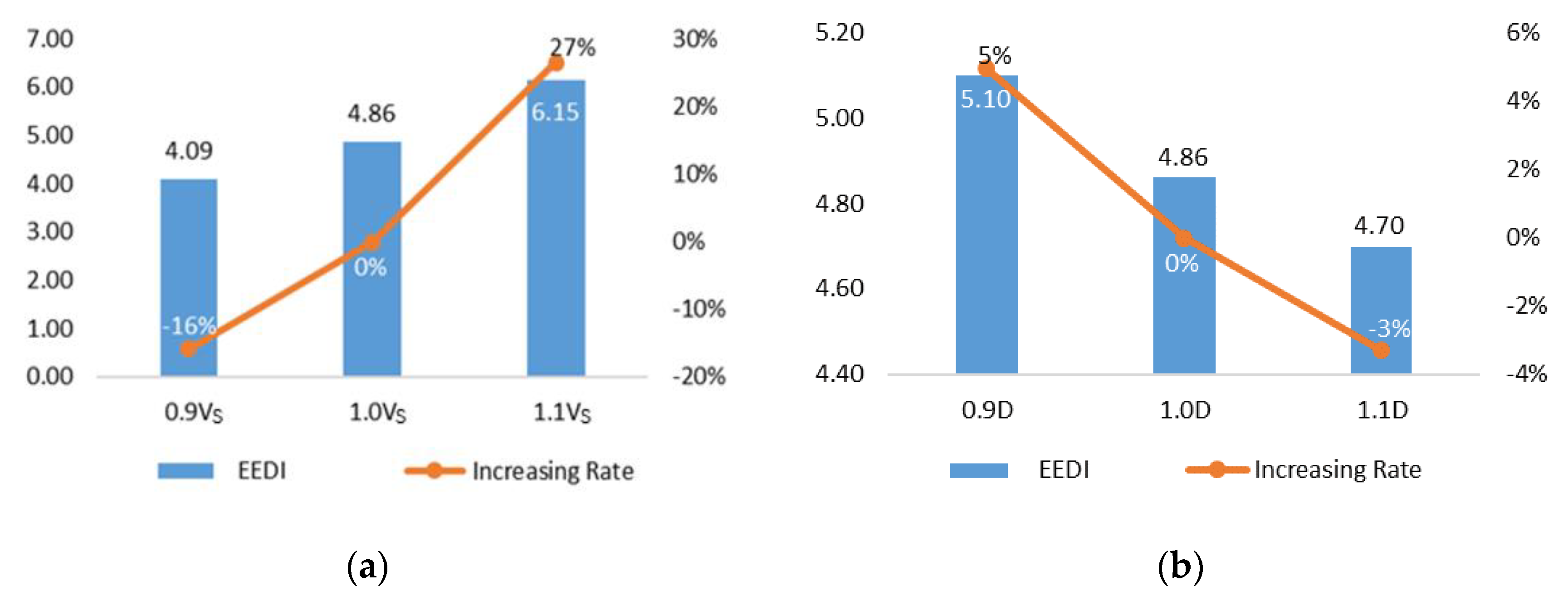
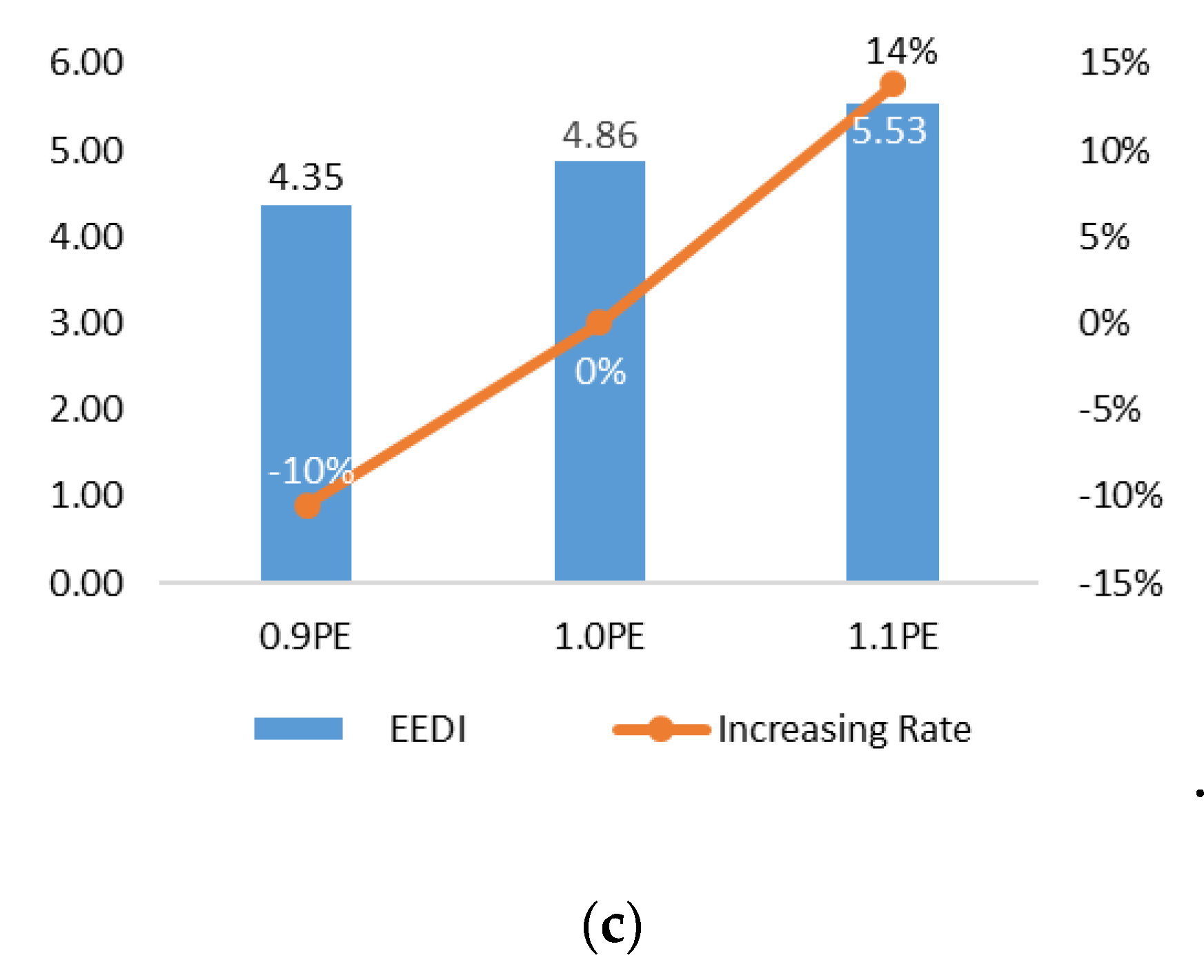
3.4. Study of System Matching Parameters on EEDI
3.5. System Matching Parameters to Satisfy EEDI at Different Phases
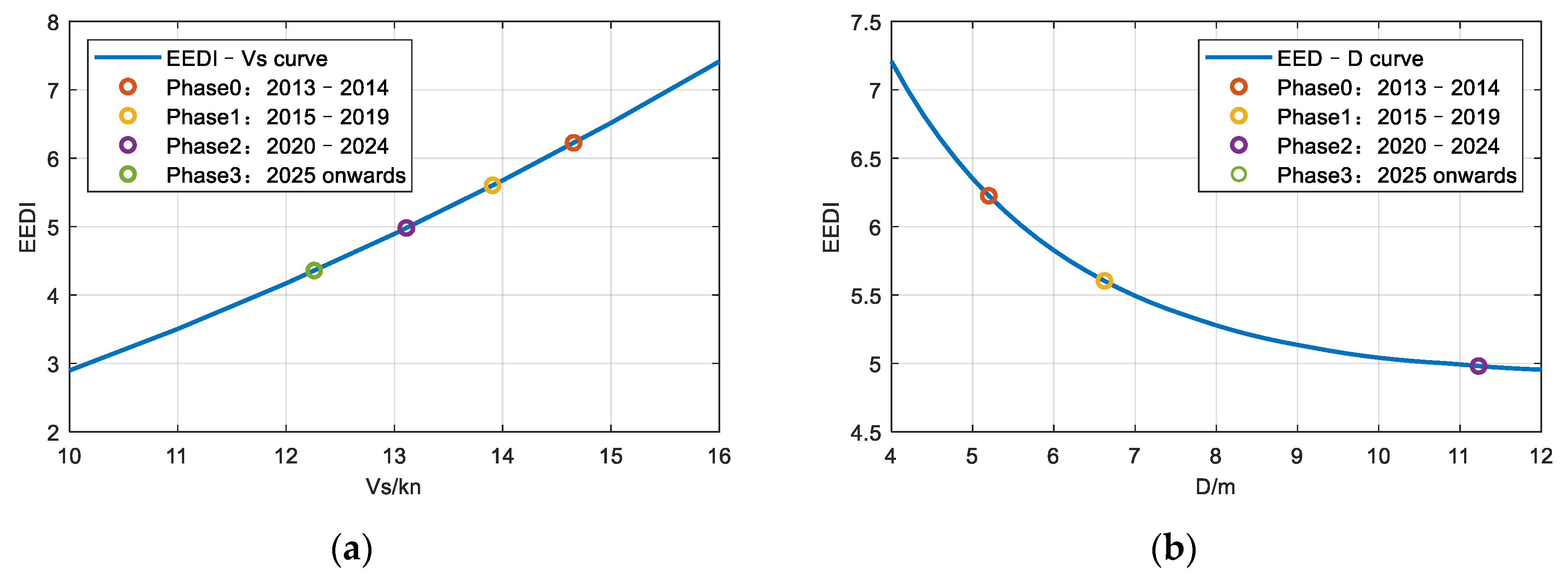
3.5.1. A Certain Ship at Different EEDI Phases
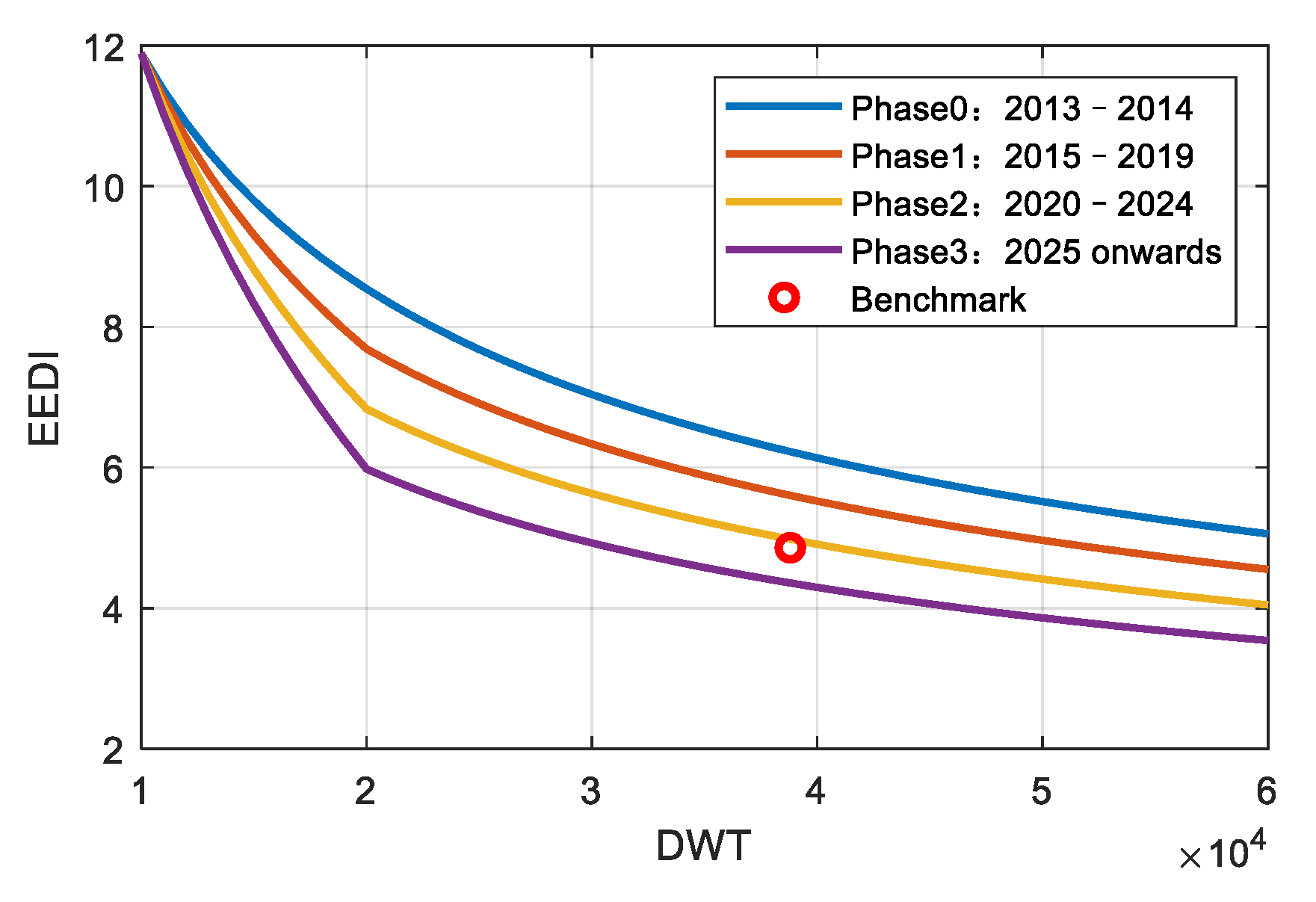
3.5.2. The DWT’s Changing at a Certain EEDI (Phase 3)
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AE | auxiliary engine |
| AIS | Automatic Identification System |
| CSR | continuous service rating |
| CO2 | Carbon Dioxide |
| CODOG | Combined Diesel or Gas Turbine System |
| CPP | Controllable Pitch Propeller |
| CRP | Contra Rotating Propeller |
| DWT | deadweight tonnage |
| EEDI | Energy Efficiency Design Index |
| GHG | Greenhouse Gas |
| ICCT | International Council on Clean Transportation |
| IMO | International Maritime Organization |
| LFC | Lifetime Fuel Consumption |
| LNG | Liquefied Natural Gas |
| MCR | maximum continuous rating |
| ME | main engine |
| MEPC | Marine Environment Protection Committee |
| NMVOC | Non-Methane Volatile Organic Compounds |
| NOx | Nitrogen Oxide |
| NSGA | Non-dominated Sorting Genetic Algorithm |
| PM | particulate matter |
| SFC | specific fuel consumption |
| Symbols | |
| Capacity | deadweight tonnage rating for bulk carriers |
| CF | CO2 emission factor |
| D | diameter |
| feff(i) | availability factor of individual energy efficiency technologies |
| fj | correction factor for ship specific design elements |
| fw | coefficient indicating the decrease in ship speed |
| fi | capacity adjustment factor |
| fc | cubic capacity correction factor |
| fl | correction factor to compensate deadweight losses |
| J | advance ratio |
| KQ | torque coefficient |
| KT | trust coefficient |
| n | rotational speed |
| PAE | power of auxiliary engine |
| PE | ship effective power |
| PME | power of main engine |
| R | ship resistance |
| t | thrust deduction factor |
| V | ship speed |
| Vref | ship speed at maximum design load condition |
| ω | wake factor |
| hull efficiency | |
| open water propeller efficiency | |
| relative rotation efficiency | |
| transmission efficiency |
References
- UNCTAD. Review of Maritime Transport 2018; United Nations Publication: New York, NY, USA, 2018; pp. 23–26. [Google Scholar]
- MAN Diesel & Turbo. EEDI (Energy Efficiency Design Index); MAN Diesel & Turbo: Augsburg, Germany, 2007; pp. 3–4. [Google Scholar]
- Hon, G.; Wang, H. The Energy Efficiency Design Index (EEDI) for New Ships. Available online: https://theicct.org/publications/energy-efficiency-design-index-eedi-new-ships (accessed on 18 July 2019).
- MAN Diesel & Turbo. Propulsion of 200,000–210,000 dwt Large Capesize Bulk Carrier; MAN Diesel & Turbo: Copenhagen, Denmark, 2014; pp. 7–17. [Google Scholar]
- Winterthur Gas & Diesel. Low-Speed Engines 2018; Winterthur Gas & Diesel: Gothenburg, Sweden, 2018; pp. 39–41. [Google Scholar]
- Wärtsilä. Wärtsilä Solutions for Marine and Oil & Gas Markets; Wärtsilä: Helsinki, Finland, 2015; pp. 91–185. [Google Scholar]
- Rolls-Royce. MARINE Products and Systems; Rolls-Royce: Newcastle, UK, 2017; pp. 25–33. [Google Scholar]
- MAN Diesel & Turbo. Basic Principles of Ship Propulsion; MAN Diesel & Turbo: Copenhagen, Denmark, 2011; pp. 12–30. [Google Scholar]
- Wärtsilä. Marine Solutions; Wärtsilä: Helsinki, Finland, 2012; pp. 77–79. [Google Scholar]
- Rawson, K.J.; Tupper, E.C. Basic Ship Theory, 5th ed.; Butterworth-Heinemann: Oxford, UK, 2001; pp. 652–661. [Google Scholar]
- Woud, H.K.; Stapersma, D. Design of Propulsion and Electric Power Generation Systems; IMarEST: London, UK, 2002; pp. 413–469. [Google Scholar]
- Stapersma, D.; Woud, H.K. Matching propulsion engine with propulsor. J. Mar. Eng. Technol. 2005, 4, 25–32. [Google Scholar] [CrossRef]
- Taskar, B.; Yum, K.K.; Pedersen, E. Dynamics of a marine propulsion system with a diesel engine and a propeller subject to waves. In Proceedings of the ASME 2015 34th International Conference on Ocean, Offshore and Arctic Engineering, St. John’s, NL, Canada, 31 May–5 June 2015. [Google Scholar]
- Ogar, O.B.; Nitonye, S.; John-Hope, I. Design Analysis and Optimal Matching of a Controllable Pitch Propeller to the Hull and Diesel Engine of a CODOG System. J. Power Energy Eng. 2018, 6, 53. [Google Scholar] [CrossRef]
- Sasaki, N.; Kuroda, M.; Fujisawa, J.; Imoto, T.; Sato, M. On the model tests and design method of hybrid CRP podded propulsion system of a feeder container ship. In Proceedings of the 1st International Symposium on Marine Propulsors SMP, Trondheim, Norway, 1 June 2009; Volume 9. [Google Scholar]
- Xie, G. Optimal preliminary propeller design based on multi-objective optimization approach. Procedia Eng. 2011, 16, 278–283. [Google Scholar] [CrossRef]
- Qin, F.; Zhan, Z.; Yang, B. Design of ship engine and propeller matching for ship propulsion system based on genetic algorithm. J. Wuhan Univ. Technol. 2003, 27, 50–52. [Google Scholar]
- Xun, J. Design of ship engine and propeller matching platform for ship propulsion system based on genetic algorithm. Ship Sci. Technol. 2017, 20, 174–176. [Google Scholar]
- Feng, F.; Huang, S.; Hu, J. Application of Artificial Neural Network to Design of Propeller. J. Harbin Eng. Univ. 2002, 23, 1–4. [Google Scholar]
- Bondia, R.; Ghosh, S.; Kanjilal, K. International crude oil prices and the stock prices of clean energy and technology companies: Evidence from non-linear cointegration tests with unknown structural breaks. Energy 2016, 101, 558–565. [Google Scholar] [CrossRef]
- Esmailian, E.; Ghassemi, H.; Zakerdoost, H. Systematic probabilistic design methodology for simultaneously optimizing the ship hull–propeller system. Int. J. Nav. Archit. Ocean Eng. 2017, 9, 246–255. [Google Scholar] [CrossRef]
- Koenhardono, E.S.; Djatmiko, E.B.; Soeprijanto, A.; Irawan, M.I. Neural Network-Based Engine Propeller Matching (NN-EPM) for Trimaran Patrol Ship. Appl. Mech. Mater. 2014, 493, 388–394. [Google Scholar] [CrossRef]
- Trozzi, C. Emission Estimate Methodology for Maritime Navigation; Techne Consulting: Kilchberg, Switzerland, 2010. [Google Scholar]
- Borkowski, T.; Kasyk, L.; Kowalak, P. Assessment of ship’s engine effective power, fuel consumption and emission using the vessel speed. J. KONES 2011, 18, 31–39. [Google Scholar]
- Trodden, D.G. Optimal Propeller Selection When Accounting for a Ship’s Maneuvering Response due to Environmental Loading. Ph.D. Thesis, Newcastle University, Newcastle, UK, 2014. [Google Scholar]
- Stapersma, D. The Importance of (E) Mission Profiles for Naval Ships; INEC: Plymouth, UK, 1994. [Google Scholar]
- Gabrieli, G.; Karman, G. What Price Speed? Mech. Eng. 1950, 7, 75–78. [Google Scholar]
- MEPC 59-4-21. Comments on the Coefficient “fw” in the EEDI Formula; International Maritime Organization: London, UK, 2009. [Google Scholar]
- MEPC 59-4-14. Correction Coefficients fj and fi for EEDI for Ships Having an Ice Class; International Maritime Organization: London, UK, 2009. [Google Scholar]
- MEPC 60-4-1. Clarifications for Definitions of Ship Types and for the Use of Ice Class Correction Factors fj and fi in the Calculation of EEDI; International Maritime Organization: London, UK, 2009. [Google Scholar]
- Li, C.L.; Zhou, S.; Han, Y. Research on the Influence of Wind Energy on New Energy Utilization Coefficient of EEDI. Adv. Mater. Res. 2013, 744, 561–565. [Google Scholar] [CrossRef]
- Kristensen, H.O.H.; Lützen, M. Existing Design Trends for Tankers and Bulk Carriers—Design Changes for Improvement of the EEDI in the Future; IMDC: Galsgow, UK, 2012. [Google Scholar]
- Papanikolaou, A.; Zaraphonitis, G.; Bitner-Gregersen, E.; Shigunov, V.; Moctar, O.E.; Soares, C.G.; Reddy, D.N.; Sprenger, F. Energy Efficient Safe Ship Operation (SHOPERA). Transp. Res. Procedia 2016, 14, 820–829. [Google Scholar] [CrossRef]
- Sui, C.; Stapersma, D.; Visser, K.; De Vos, P.; Ding, Y. Energy effectiveness of ocean-going cargo ship under various operating conditions. Ocean Eng. 2019, 190, 106473. [Google Scholar] [CrossRef]
- Henningsen, R.; Skjolsvik, K.; Andersen, A.; Corbett, J.; Skjelvik, J. Study of Greenhouse Gas Emissions from Ships: Final Report to the International Maritime Organization; MARINTEK: Trondheim, Norway, 2000. [Google Scholar]
- Li, J. Design of large ship based on EEDI calculation and optimization. Ship Sci. Technol. 2017, 39, 1–3. [Google Scholar]
- Hou, C. Key Technologies Study on the Energy Efficiency Design Index of Shallow Draught Bulk Carrier. Master’s Thesis, Zhejiang University, Hangzhou, China, 2014. [Google Scholar]
- MEPC 70-5-4. EEDI Calculation Method for Ships Using Gas Fuel as Non-Primary Fuel; International Maritime Organization: London, UK, 2016. [Google Scholar]
- Faitar, C.; Novac, I. A new approach on the upgrade of energetic system based on green energy. A complex comparative analysis of the EEDI and EEOI. IOP Conf. Ser. Mater. Sci. Eng. 2016, 145, 42014. [Google Scholar] [CrossRef]
- Livanos, G.A.; Theotokatos, G.; Pagonis, D.N. Techno-economic investigation of alternative propulsion plants for Ferries and RoRo ships. Energy Convers. Manag. 2014, 79, 640–651. [Google Scholar] [CrossRef]
- MEPC 62-INF.35. Calculation Method to be Applied in the EEDI Calculation of Wind Propulsion Systems; International Maritime Organization: London, UK, 2011. [Google Scholar]
- MEPC 64-4-8. Guidance on Treatment of Innovative Energy Efficiency Technologies for Calculation and Verification of the Attained EEDI; International Maritime Organization: London, UK, 2012. [Google Scholar]
- MEPC 1-Circ.1-Circ.815. 2013 Guidance on Treatment of Innovative Energy Efficiency Technologies for Calculation and Verification of the Attained EEDI; International Maritime Organization: London, UK, 2013. [Google Scholar]
- Devanney, J. The impact of the energy efficiency design index on very large crude carrier design and CO2 emissions. Ships Offshore Struct. 2011, 6, 355–368. [Google Scholar] [CrossRef]
- Devanney, J.; Beach, S. EEDI—A Case Study in Indirect Regulation of CO2 Pollution; Center for Tankship Excellence: Tavernier, FL, USA, 2010. [Google Scholar]
- Krüger, S. The Energy Efficiency Design Index (EEDI) for RoRo-Vessels; Technische Universität Hamburg-Harburg: Hamburg, Germany, 2004. [Google Scholar]
- Li, G. Study on Marine Engine Selection Based on Ship Energy Efficiency Design Index. Master’s Thesis, Dalian Maritime University, Dalian, China, 2014. [Google Scholar]
- Shi, W.; Grimmelius, H.T.; Stapersma, D. Analysis of ship propulsion system behavior and the impact on fuel consumption. Int. Shipbuild. Prog. 2010, 57, 35–64. [Google Scholar]
- Chen, Y.Y.; Cao, Y.F.; Xing, H.L. Analysis of Marine Exhaust Pollutant Emission Standard Research. In Proceedings of the 4th International Conference on Sustainable Energy and Environmental Engineering, Shenzhen, China, 20–21 December 2015. [Google Scholar]
- International Maritime Organization. MARPOL Annex VI and NTC 2008: With Guidelines for Implementation; International Maritime Organization: London, UK, 2013. [Google Scholar]
- Ding, Y.; Ren, H.; Sui, C. Design and Application of a Ship Propulsion System Matching Platform with Low-Speed Engine; CIMAC: Vancouver, BC, Canada, 2019. [Google Scholar]
- Molland, A.F.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion, 2nd ed.; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Tu, H.; Yang, Y.; Zhang, L.; Xie, D.; Lyu, X.; Song, L.; Guan, Y.; Sun, J. A modified admiralty coefficient for estimating power curves in EEDI calculations. Ocean Eng. 2018, 150, 309–317. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Ship Data | Propeller Data | Machinery Data | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ω | t | VS * | R * | Ae/Ao | ηR | D * | n | P/D | ηO | PB * | ηTRM | |
| 1 | I | I | I | I | I | I | I | O | O | O | O | I |
| 2 | I | I | I | O | I | I | I | O | O | O | I | I |
| 3 | I | I | O | I | I | I | I | O | O | O | I | I |
| Ship Type | Size | Phase 0 1 Jan 2013–31 Dec 2014 | Phase 1 1 Jan 2015–31 Dec 2019 | Phase 2 1 Jan 2020–31 Dec 2024 | Phase 3 1 Jan 2025 onwards |
|---|---|---|---|---|---|
| Bulk carrier | ≥20,000 DWT | 0 | 10 | 20 | 30 |
| 10,000–20,000 DWT | n/a | 0–10 * | 0–20 * | 0–30 * | |
| Tanker | ≥20,000 DWT | 0 | 10 | 20 | 30 |
| 4000–20,000 DWT | n/a | 0–10 * | 0–20 * | 0–30 * | |
| Containership | ≥15,000 DWT | 0 | 10 | 20 | 30 |
| 10,000–15,000 DWT | n/a | 0–10 * | 0–20 * | 0–30 * |
| Ship Type | a | b | c |
|---|---|---|---|
| Bulk carrier | 961.79 | Capacity | 0.477 |
| Tanker | 1218.80 | Capacity | 0.488 |
| Containership | 174.22 | Capacity | 0.201 |
| Principal particulars | Length between perpendiculars (m) | 179.95 | Breadth molded (m) | 32 |
| Scantling draught molded (m) | 9.5 | Ship Speed (kn) | 14 | |
| Deadweight at Scantling draught (t) | 38800 | |||
| Main engine | Type | WinGD 5 × 52 | Maximum continuous rating (MCR) | 6408 kW at 99 rpm |
| SFC at 75% MCR (g/kWh) | 160.75 | Number of set | 1 | |
| Fuel type | Diesel Oil | CF (t-CO2/t-Fuel) | 3.206 | |
| Propeller | Kind of propeller | Special | Number of Blades | 3 |
| Diameter (m) | 6.4 | Nominal Rotational Speed (rpm) | 99 | |
| Other coefficients | Shaft Efficiency | 0.99 | Relative Rotation Efficiency | 1.046 |
| Wake Factor | 0.342 | Thrust Deduction Factor | 0.21 | |
| Sea Margin | 15% | Engine Margin | 28.6% |
| V (kn) | 12.5 | 13 | 13.5 | 14 | 14.5 | 15 | 15.5 |
|---|---|---|---|---|---|---|---|
| PE (kW) | 2220 | 2508.3 | 2840.1 | 3227.5 | 3687.0 | 4240.9 | 4918.8 |
| Characteristic | Actual Value | Calculated Value | Error |
|---|---|---|---|
| Power of Engine CSR (kW) | 4575 | 4707 | 2.89% |
| Rotational speed of Engine CSR (rpm) | 88.5 | 89.9 | 1.58% |
| Power of Engine MCR (kW) | 6408 | 6276 | 2.06% |
| Rotational speed of Engine MCR (rpm) | 99 | 103.1 | 4.14% |
| Characteristic | Actual Value | Calculated Value | Error |
|---|---|---|---|
| Ship speed of CSR (kn) | 14.0 | 14.2 | 1.4% |
| Ship speed of MCR (kn) | - | 15.2 | - |
| Basic values | Type of Ship | Bulk Carrier | ||
| Capacity (DWT) | 38800 | Ship Speed (kn) | 14 | |
| Main engine | MCRME (kW) | 6408 | SFCME (g/kWh) | 160.75 |
| Fuel type | Diesel | CF (t-CO2/t-Fuel) | 3.206 | |
| Auxiliary engine | Fuel type | Diesel | PAE | 0.05 × MCRME |
| CF (t-CO2/t-Fuel) | 3.206 | SFCME (g/kWh) | 215 | |
| Other coefficients | fj, feff(i), fc, fl, fi, fw | 1.0 | ||
| SSE | R-Square | Adjusted R-Square | DFE | RMSE |
|---|---|---|---|---|
| 4.3 × 10−8 | 1 | 1 | 119 | 1.9 × 10−5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, H.; Ding, Y.; Sui, C. Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching. J. Mar. Sci. Eng. 2019, 7, 425. https://doi.org/10.3390/jmse7120425
Ren H, Ding Y, Sui C. Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching. Journal of Marine Science and Engineering. 2019; 7(12):425. https://doi.org/10.3390/jmse7120425
Chicago/Turabian StyleRen, Huilin, Yu Ding, and Congbiao Sui. 2019. "Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching" Journal of Marine Science and Engineering 7, no. 12: 425. https://doi.org/10.3390/jmse7120425
APA StyleRen, H., Ding, Y., & Sui, C. (2019). Influence of EEDI (Energy Efficiency Design Index) on Ship–Engine–Propeller Matching. Journal of Marine Science and Engineering, 7(12), 425. https://doi.org/10.3390/jmse7120425