Navigators’ Behavior Analysis Using Data Mining


Abstract
:1. Introduction
1.1. Safety of Navigation
1.2. Behaviour Profiles
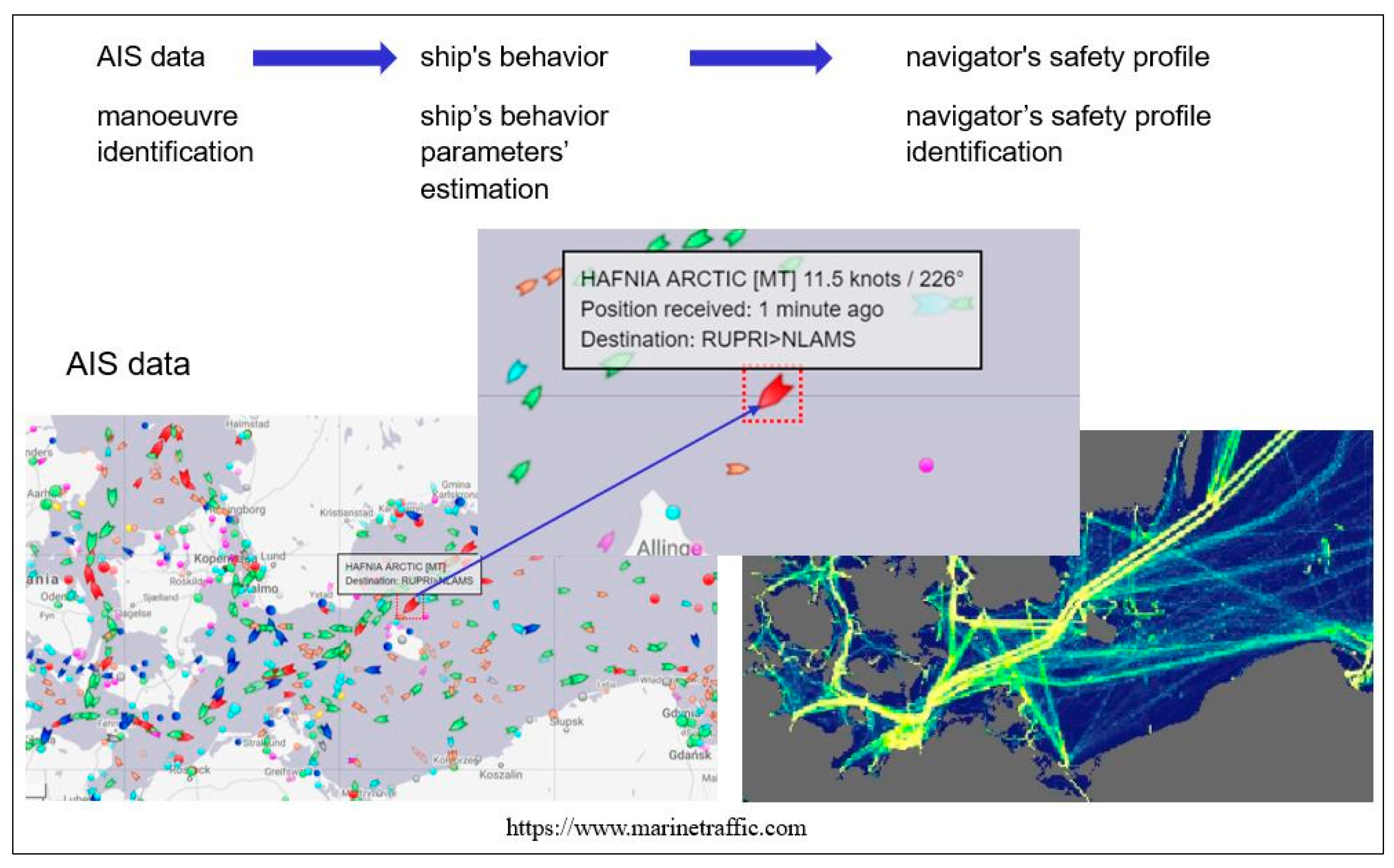
1.3. Navigators’ Safety Profile
2. Materials and Methods
2.1. Simulation Research—Stage I
2.1.1. Scenarios
- (1)
- Seven stations are manned by training course participants, each with full access to shipboard equipment (radar, ARPA, AIS and ECDIS) and visualization, with the ability to alter ship’s course and/or speed.
- (2)
- The other (target) ship is programmed to move without course or speed changes, regardless of its status as give-up or stand-on vessel;
- (3)
- At the start of the exercise, registration begins of data from the AIS systems of the seven independent own ships and the target ship.
- (1)
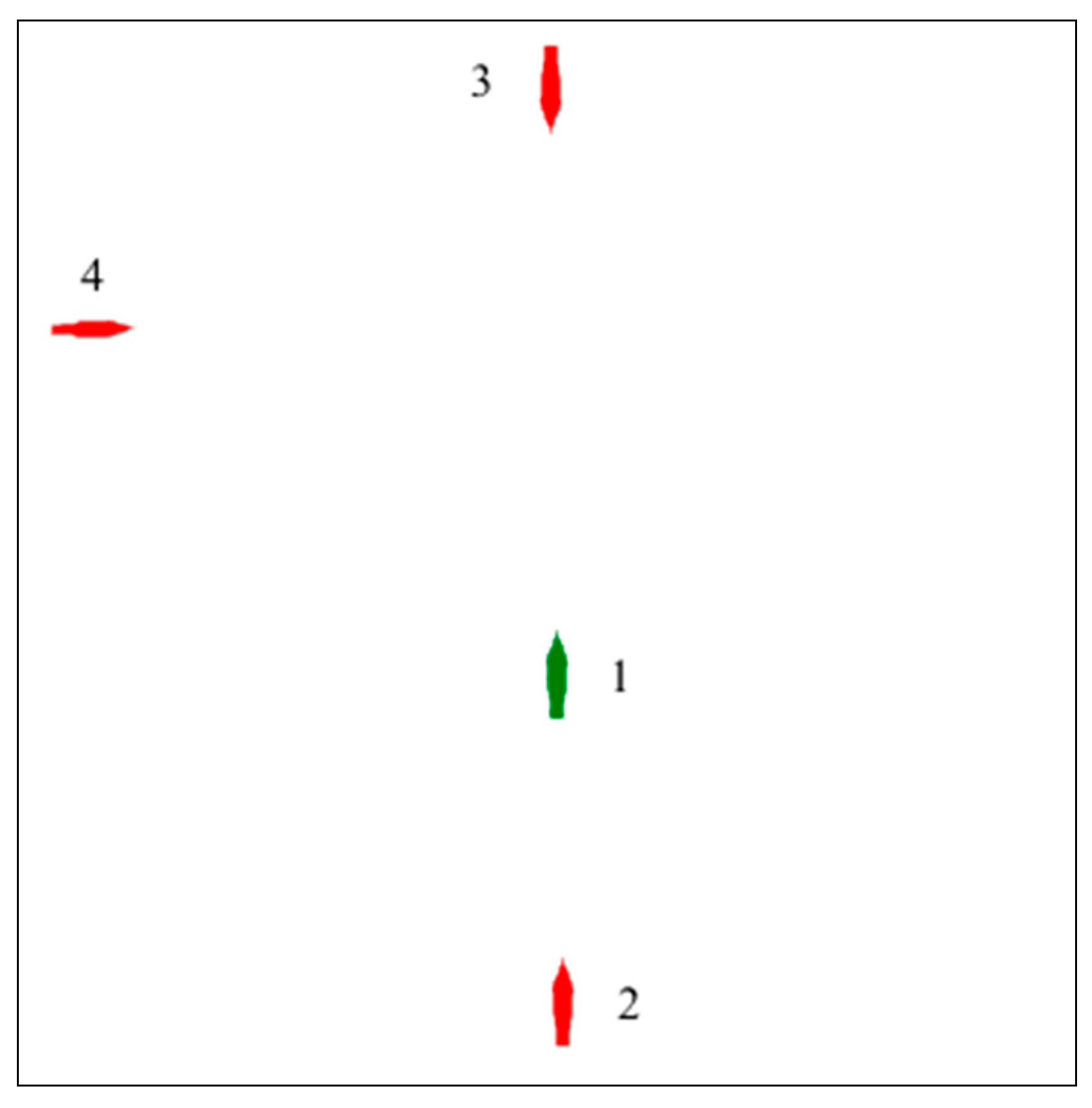
- Encounter of two ships, initial course 180°—“Overtaking”, maneuvering ship does not have the right of way (Figure 3, ship 2);
- (2)
- Encounter of two ships, initial course 000°, “Head-on” situation, maneuvering ship does not have the right of way, both ships should perform a maneuver (Figure 3, ship 3);
- (3)
- Encounter of two ships, initial course 045°—“Crossing”, maneuvering ship does not have the right of way (Figure 3, ship 4).
- (1)
- Non-maneuvering ship on a preset course;
- (2)
- Maneuvering ship in the scenario “Overtaking”;
- (3)
- Maneuvering ship in the scenario “Head-on”;
- (4)
- Maneuvering ship in the scenario “Crossing”.
2.1.2. Data Collection
- (1)
- Equal: all ships ‘full ahead’,
- (2)
- “High-slow”—maneuvering ship at ‘full ahead’, approximately twice faster than the non-maneuvering ship’s speed,
- (3)
- ‘Slow-high”—maneuvering ship proceeds at a speed approximately twice slower than the non-maneuvering ship going ‘full ahead’.
2.1.3. Data Processing
2.2. Data Mining—Stage II
2.2.1. Data Mining Methods and Tools
2.2.2. The Navigator Profile Identification Method
- (1)
- Evolutionary weights optimization—this operator calculates the weights of the attributes of the given example set by using a genetic algorithm. The higher the weight of an attribute, the more relevant it is considered;
- (2)
- Backward weight optimization—assumes that features are independent and optimizes the weights of the attributes with a linear search. It involves starting with all candidate variables, testing the deletion of each variable using a chosen model fit criterion, deleting the variable (if any) whose loss gives the most statistically insignificant deterioration of the model fit, and repeating this process until no further variables can be deleted without a statistically significant loss of fit;
- (3)
- PSO weight optimization (Particle Swarm Optimization)—uses a particle swarm optimization approach. PSO algorithm works by having a population (called a swarm) of candidate solutions (called particles). These particles are moved around in the search-space according to a few simple formulae.
- (1)
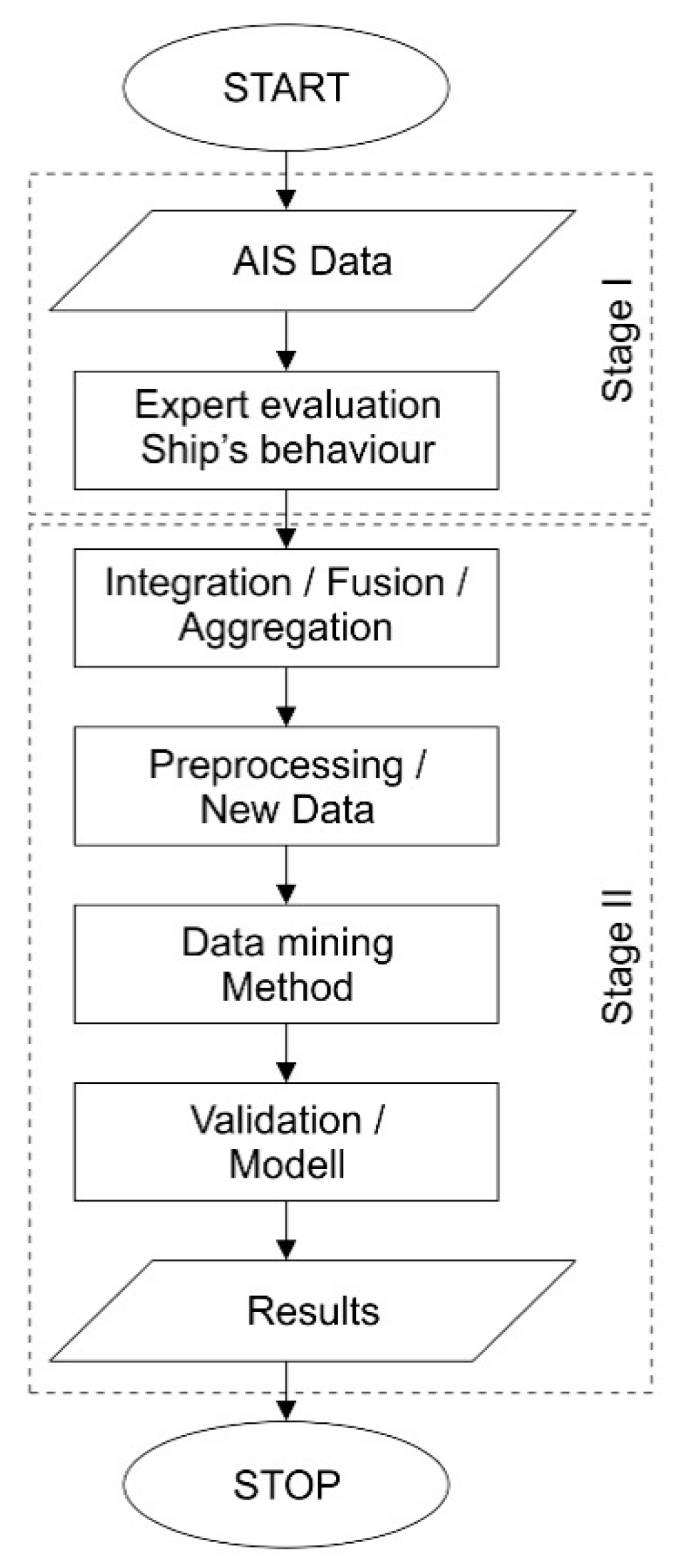
- Integration/Fusion/Aggregation—reduction of ‘raw’ AIS data (simulator) to single records of data corresponding to one passage; aggregation of the obtained data with expert’s evaluation.
- (2)
- Pre-processing/New Data—data cleansing, verification of data correctness, determining special attributes, modification of the types (domains) and creating new attributes from existing data. Preparation of the data in view of the data mining method chosen in the next step (e.g., domain of the attributes and division of the data set into subsets).
- (3)
- Data mining method choice; validation of the created model.
- (4)
- Presentation of the results of the classifier performance.
3. Results
3.1. Simulation Results
- (1)
- Time of starting the maneuver;
- (2)
- Distance at maneuver start;
- (3)
- Value of course alteration;
- (4)
- If the maneuver was correct (to port or starboard);
- (5)
- Number of course maneuvers to pass the other ship;
- (6)
- Number of course maneuvers to return to original course;
- (7)
- Number of speed maneuvers;
- (8)
- If course and speed maneuvers were performed.
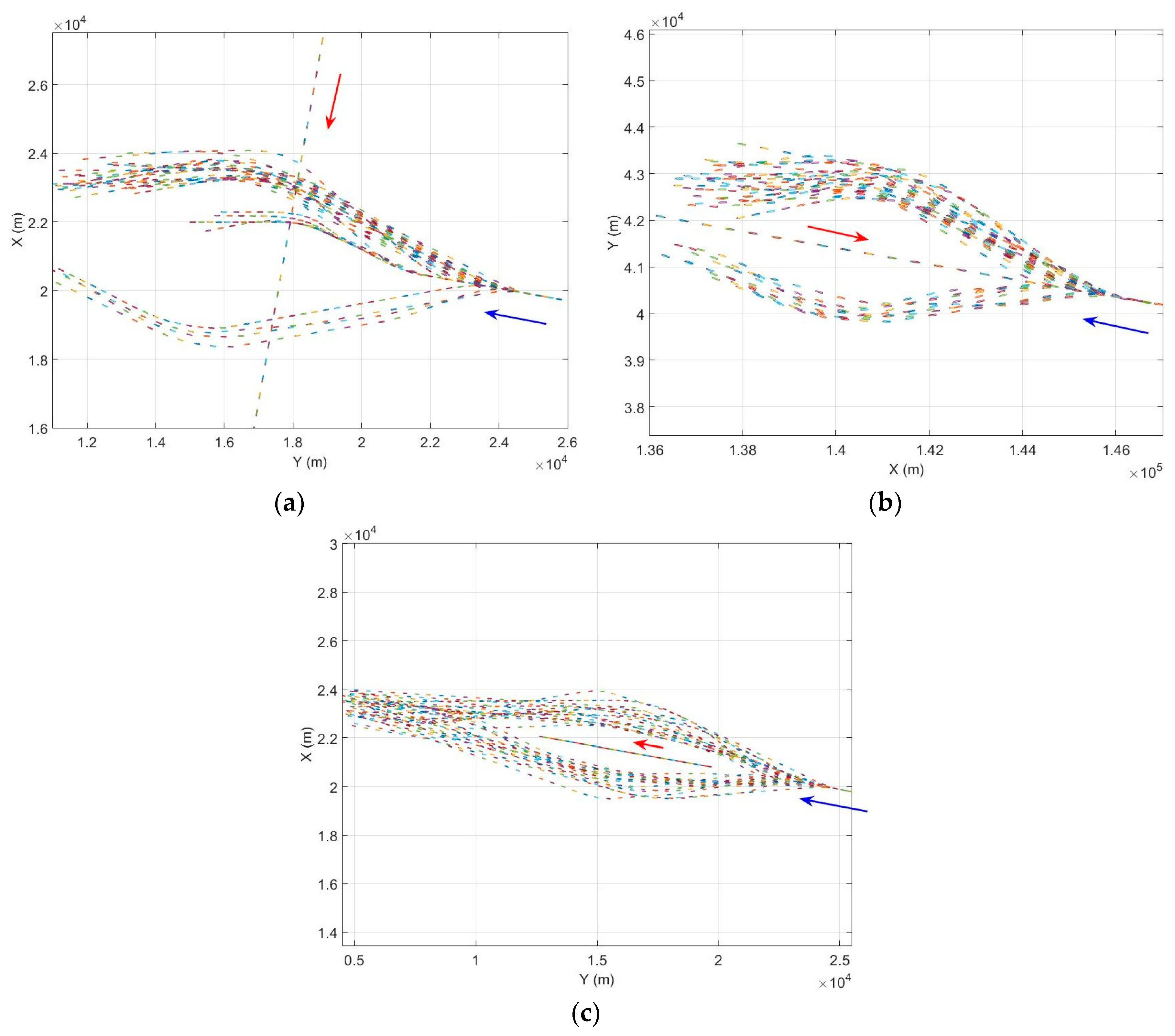
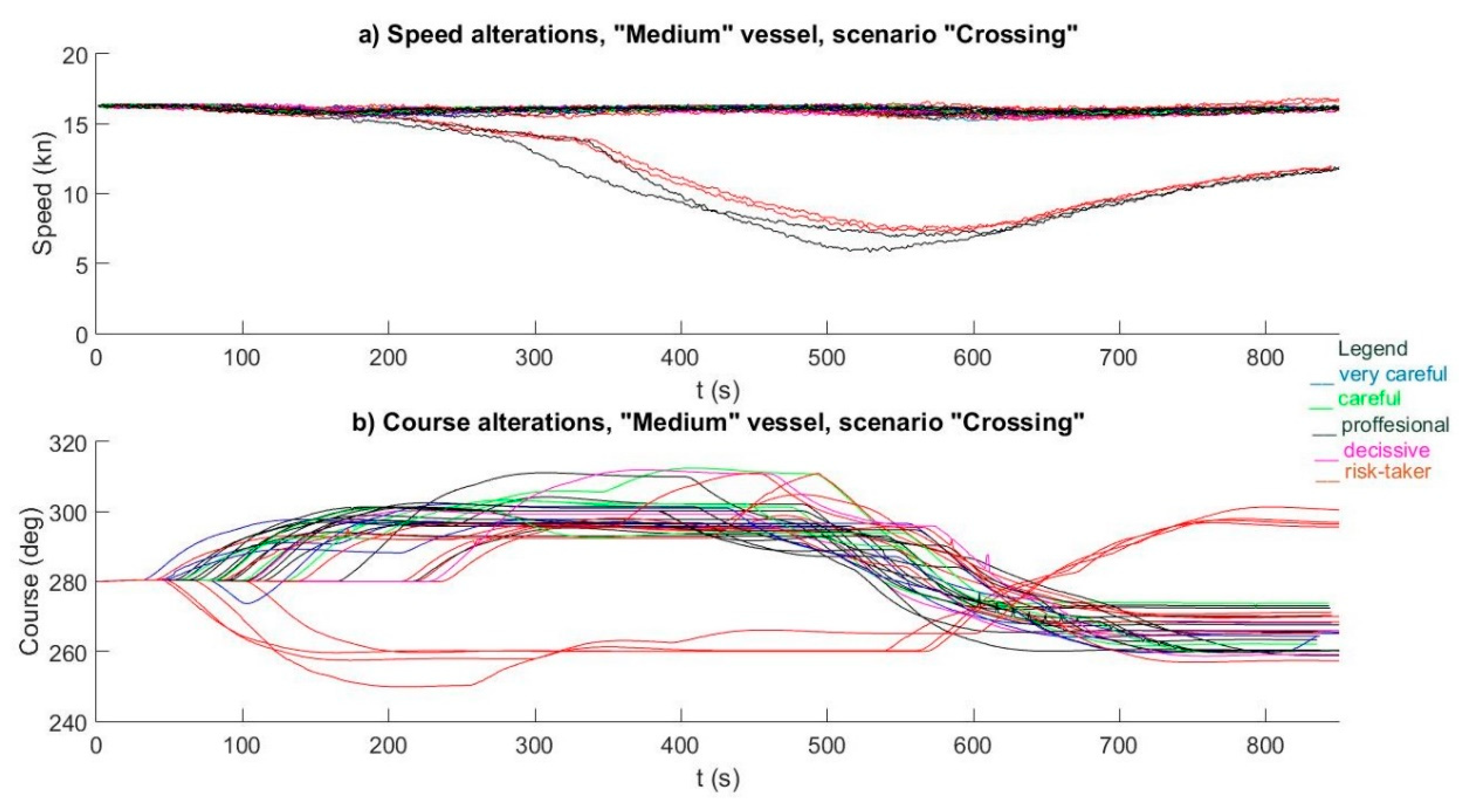
3.1.1. Scenario “Crossing”
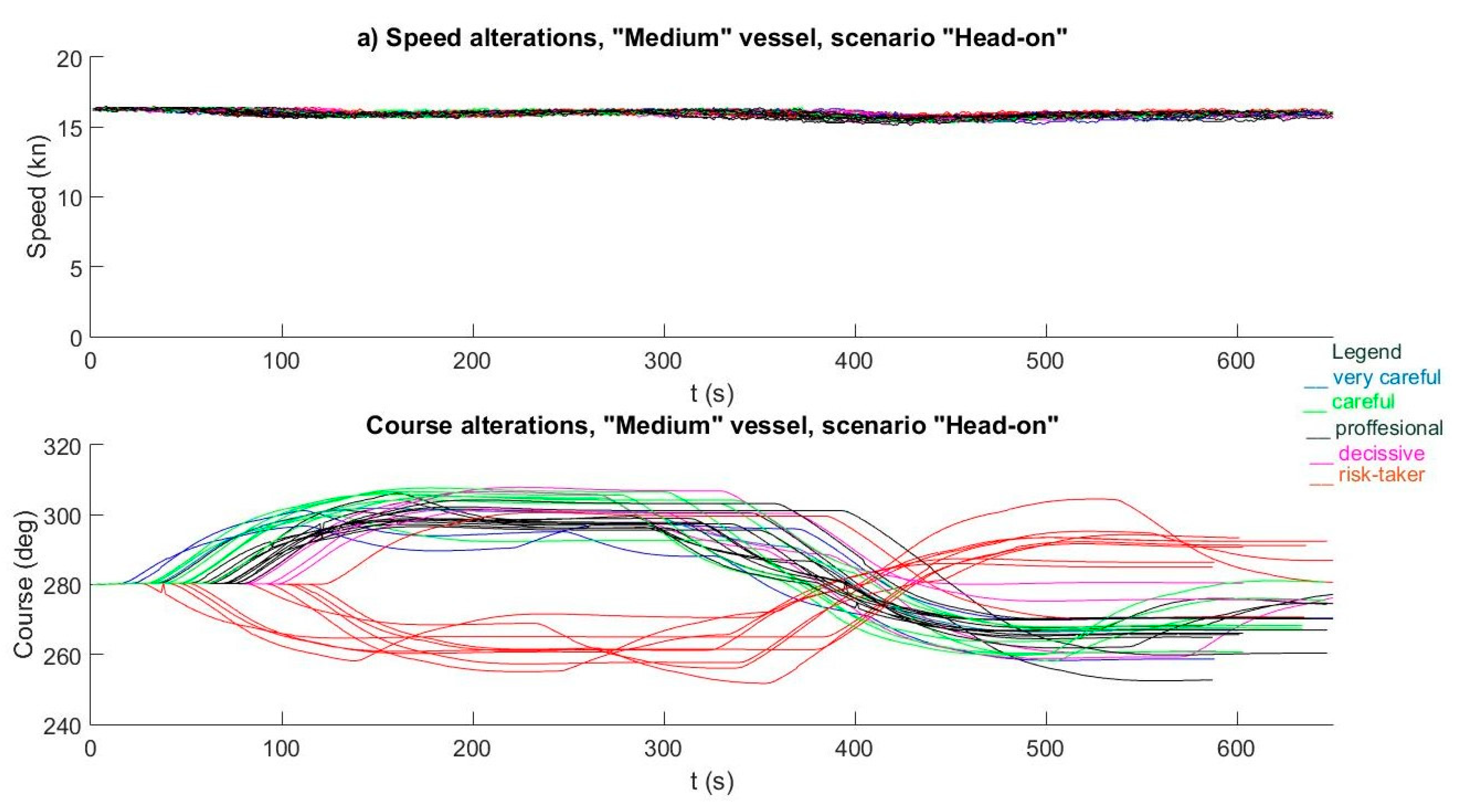
3.1.2. Scenario “Head-on”
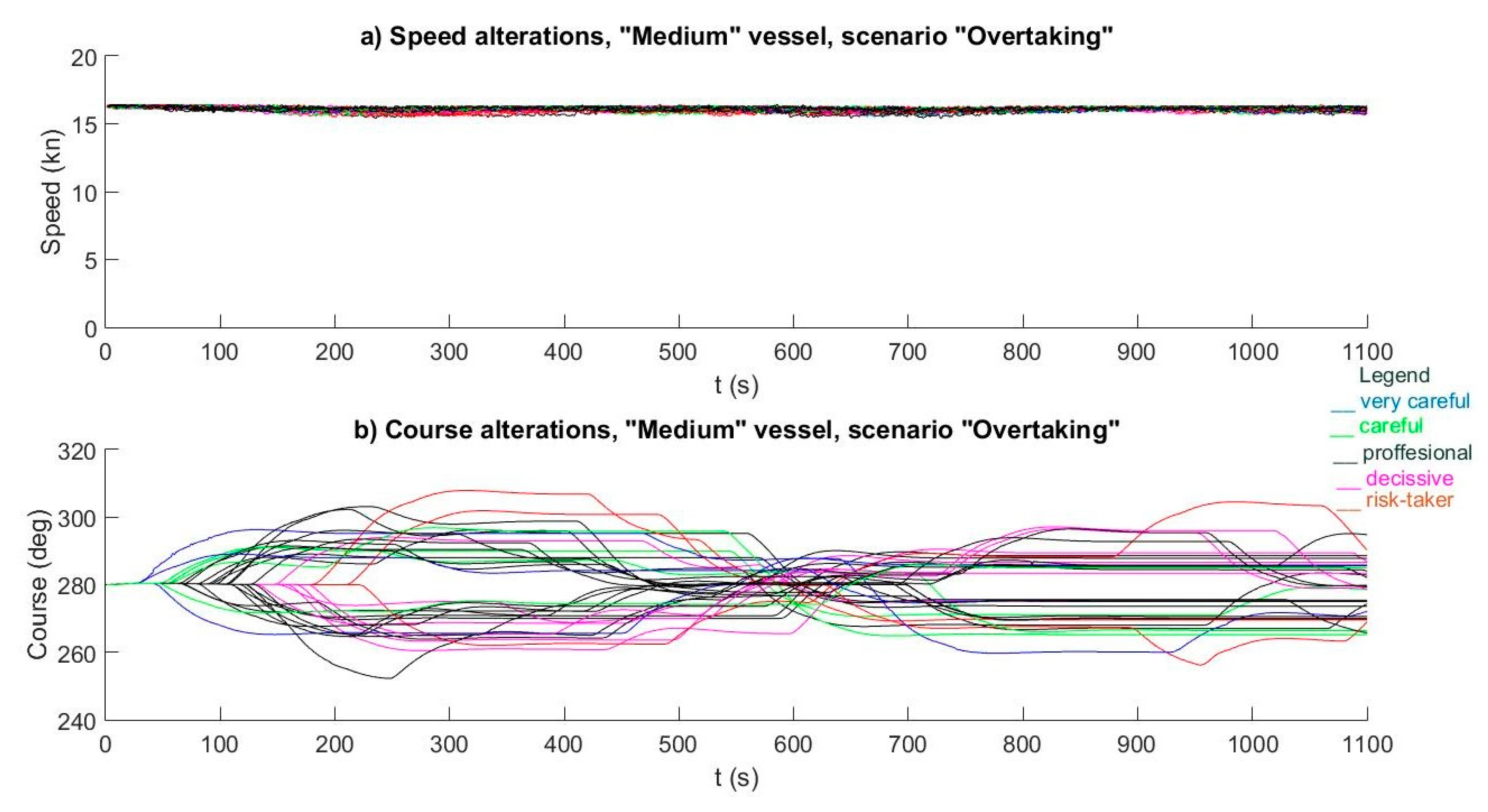
3.1.3. Scenario “Overtaking”
3.2. Data Mining Results
- (1)
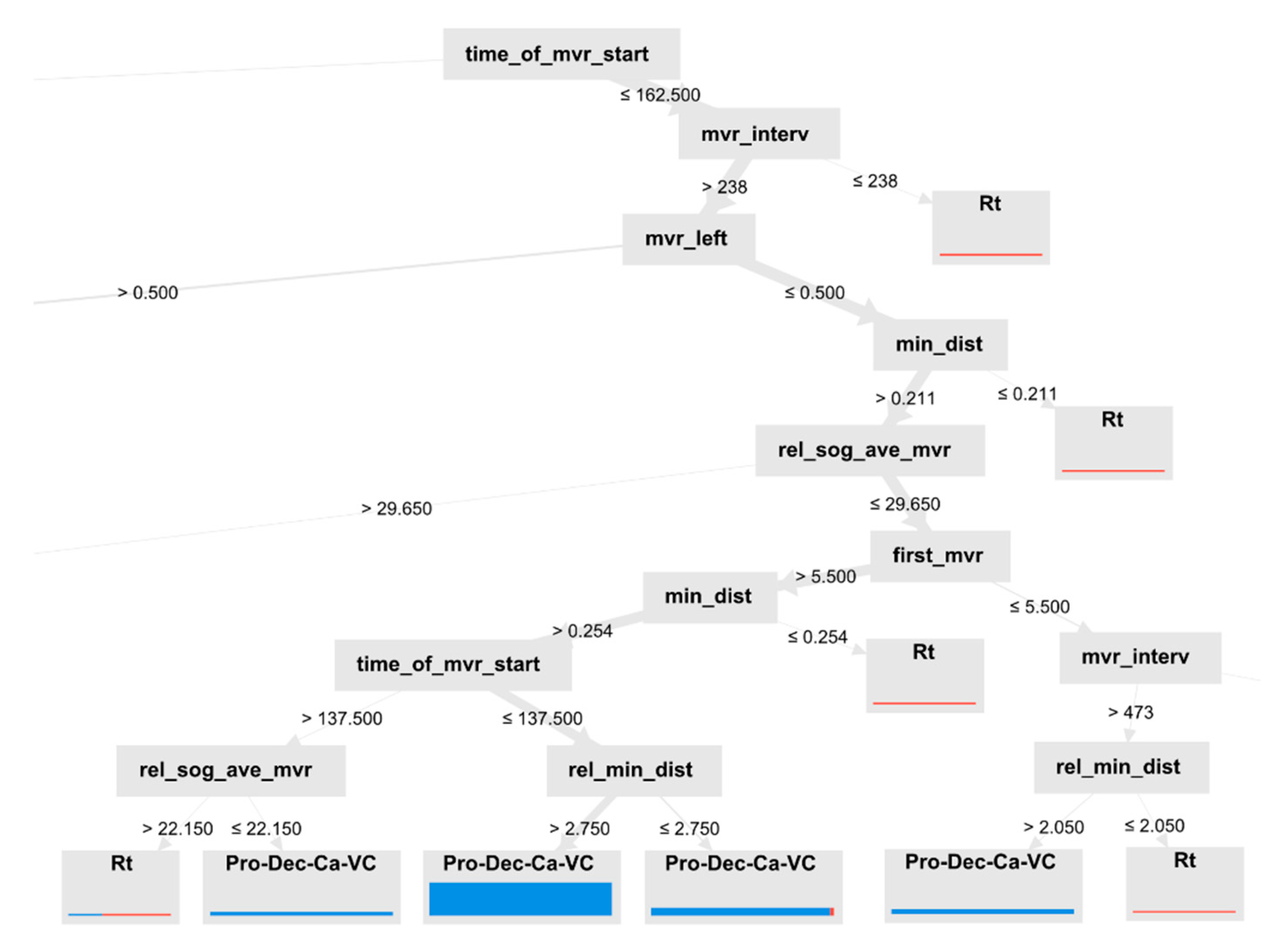
- Decision tree #1: max depth—7; split criterion—Gini index; prepruning—false; pruning—false;
- (2)
- Decision tree #2: max depth—10; split criterion—Gini index; prepruning—true; pruning—false;
- (3)
- Decision tree #3: max depth—10; split criterion—Gini index; prepruning—false; pruning—false; attribute optimization-evolutionary algorithm; set division: testing/training—0.7/0.3;
- (4)
- Decision tree #4 max depth—10; split criterion—Gini index; prepruning—false; pruning—false; attribute optimization—PSO algorithm; set division: testing/training—0.7/0.3;
- (5)
- Neural network: one hidden layer with five neurons; 5000 training epochs;
- (6)
- Heuristic rules: classifier with decision rules established by experts;
- (7)
- Outliers: statistic algorithm for indicating data that significantly differ from the others.
4. Discussion
5. Conclusions
- (1)
- Onboard to identify potentially dangerous ships (navigators) for consideration in planning own ship maneuvers,
- (2)
- In the VTS Centre to pay more attention to ship maneuvering dangerously and to inform or warn other ships if needed,
- (3)
- For personal assessment purposes in shipping and crewing companies,
- (4)
- In education: for improvement of education at maritime institutions.
Author Contributions
Funding
Conflicts of Interest
References
- U.S. Department of Transportation; Federal Aviation Administration. Flight Standards Service: Aviation Instructor’s Handbook; United States Government Printing Office: Washington, DC, USA, 2008. Available online: http://www.faa.gov/regulations_policies/handbooks_manuals/aviation/aviation_instructors_handbook/media/faa-h-8083-9a.pdf (accessed on 21 January 2019).
- Augustynowicz, A. Modeling the Type of Car Driver; Oficyna Wydawnicza Politechniki Opolskiej: Opole, Poland, 2008. (In Polish) [Google Scholar]
- Aliefendioglu, O.; Küçükay, F. Real-Time Statistical-Based Test Environment for Transmission Control Unit of Passenger Cars. SAE Trans. 1999, 108, 1944–1953. [Google Scholar]
- Kücükay, F.; Bergholz, J. Driver Assistant Systems. In Proceedings of the ICAT 2004 International Conference on Automotive Technology “Future Automotive Technologies on Powertrain and Vehicle”, Istanbul, Turkey, 26 November 2004. [Google Scholar]
- Abramowicz-Gerig, T.; Hejmlich, A. Human Factor Modelling in the Risk Assessment of Port Manoeuvers. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2015, 9. [Google Scholar] [CrossRef] [Green Version]
- Yim, J.B.; Park, D.J.; Youn, I.H. Development of navigator behavior models for the evaluation of collision avoidance behavior in the collision-prone navigation environment. Appl. Sci. 2019, 9, 3114. [Google Scholar] [CrossRef] [Green Version]
- Wielgosz, M. The safety profile of marine navigator and its significance for the safety of maritime traffic, In Prace Naukowe Politechniki Warszawskiej; Transport: Warsaw, Poland, 2016; Volume 114, pp. 427–437. (In Polish) [Google Scholar]
- Wielgosz, M. The safety profile of sea navigator as a criterion for selection of persons responsible for the safety of navigation. In Gospodarka Materiałowa i Logistyka; PWE: Warsaw, Poland, 2016; pp. 849–858. (In Polish) [Google Scholar]
- Pietrzykowski, Z.; Wielgosz, M.; Breitsprecher, M. The determination of the sea navigator safety profile using data mining. In Communications in Computer and Information Science 1049; Mikulski, J., Ed.; Springer Nature Switzerland AG: Basel, Switzerland, 2019; pp. 333–345. [Google Scholar]
- Wielgosz, M.; Pietrzykowski, Z. Ship domain in the restricted area—Analysis of the influence of ship speed on the shape and size of the domain. Sci. J. Marit. Univ. Szczec. 2012, 30. [Google Scholar]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Han, J.; Kamber, M.; Pei, J. Data Mining: Concepts and Techniques, 3rd ed.; Morgan Kaufmann: Burlington, MA, USA, 2012. [Google Scholar]
- Fayyad, U.; Piatetsky-Shapiro, G.; Smyth, P. From Data Mining to Knowledge Discovery in Databases. AI Mag. 1996, 17, 37. [Google Scholar]
- Kantardzic, M. Data Mining: Concepts, Models, Methods, and Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Hofmann, M.; Klinkenberg, R. RapidMiner: Data Mining Use Cases and Business Analytics Applications. In Chapman & Hall/CRC Data Mining and Knowledge Discovery Series; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Zhang, Y.A. Comprehensive Survey on Particle Swarm Optimization Algorithm and Its Applications. Math. Probl. Eng. 2015, 2015, 931256. [Google Scholar] [CrossRef] [Green Version]
- Anand, D. Feature extraction for collaborative filtering: A genetic programming approach. Int. J. Comput. Sci. Issues 2012, 9, 348. [Google Scholar]
- Mikut, R.; Reischl, M. Data Mining Tools. Wiley Interdiscip. Rev. Data Min. Knowl. Discov. 2011, 1, 431–443. [Google Scholar] [CrossRef]
- Available online: https://rapidminer.com (accessed on 1 September 2019).
- Nisbet, R.; Miner, G.; Yale, K. Data Understanding and Preparation. In Handbook of Statistical Analysis and Data Mining Applications; Academic Press: Cambridge, MA, USA, 2017; pp. 55–82. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Ship Size | ||
|---|---|---|---|
| Large | Medium | Small | |
| Length (LOA; m) | 261.3 | 173.5 | 95.0 |
| Breadth (B; m) | 48.0 | 23.0 | 13.0 |
| Draught (T) (m) | 9.0 | 8.1 | 3.7 |
| Displacement (D; t) | 63,430 | 19,512 | 3,510 |
| Speed (v; kn) | 16.3 | 18.9 | 11.1 |
| Attribute | Description |
|---|---|
| COLREGs | scenario (head-on, crossing, overtake) |
| course & speed alter | course and speed maneuver |
| dist_at_mvr | real distance at maneuver start |
| first_mvr | visibility of first maneuver |
| min_dist | passing distance |
| mvr_interv | maneuvering duration (from start to passing) |
| mvr_left | maneuver to the left |
| No_course_alter | number of course alterations |
| No_mvr_return | number of return maneuvers |
| No_speed_alter | number of speed alterations |
| rel_dist_at_mvr | relative distance at maneuver start |
| rel_min_dist | relative distance of passing |
| rel_sog_ave_mvr | relative average speed during maneuver |
| rel_sog_mvr_start | relative speed at maneuver start |
| size | length of ship |
| sog_ave | real average speed over ground (whole scenario) |
| sog_ave_mvr | real average speed over ground |
| time_of_min_dist | time of minimal distance |
| time_of_mvr_start | time of maneuver start |
| Optimization Method | Evolutionary | Backward | PSO |
|---|---|---|---|
| Attribute | Weights | ||
| mvr_interv | 1.000 | 1.00 | 1.000 |
| time_of_mvr_start | 1.000 | 1.00 | 1.000 |
| sog_ave | 1.000 | 1.00 | 0.828 |
| sog_ave_mvr | 1.000 | 1.00 | 0.420 |
| rel_dist_at_mvr | 1.000 | 1.00 | 0.005 |
| rel_sog_ave_mvr | 1.000 | 1.00 | 0.000 |
| rel_sog_mvr_start | 0.877 | 1.00 | 0.488 |
| course&speed_alter | 0.484 | 1.00 | 1.000 |
| mvr_left | 0.211 | 1.00 | 1.000 |
| COLREGs | 0.205 | 1.00 | 0.200 |
| size | 0.099 | 1.00 | 0.000 |
| No_course_alter | 0.000 | 1.00 | 0.590 |
| min_dist | 0.000 | 1.00 | 0.468 |
| time_of_min_dist | 0.000 | 1.00 | 0.387 |
| rel_min_dist | 0.000 | 1.00 | 0.373 |
| dist_at_mvr | 0.000 | 1.00 | 0.201 |
| first_mvr | 0.000 | 1.00 | 0.000 |
| No_mvr_return | 0.000 | 0.00 | 0.000 |
| No_speed_alter | 0.000 | 1.00 | 0.000 |
| Class Prediction | Pro-Dec-Ca-VC | Rt | Class Precision |
|---|---|---|---|
| Pred. Pro-Dec-Ca-VC | 407 | 18 | 95.76% |
| Pred. Rt | 10 | 29 | 74.36% |
| Class recall | 97.60% | 61.70% | - |
| Accuracy 93.96% ± 2.95% (micro average: 93.97%) | - | ||
| Model/ Classifier | Decision Tree #1 | Decision Tree #2 | Decision Tree #3 | Decision Tree #4 | Neural Network | Heuristic Rules | Outliers |
|---|---|---|---|---|---|---|---|
| Risk-taker (%) | 46.8 | 53.2 | 61.7 | 63.8 | 42.6 | 60.9 | 65.2 |
| Safe (%) | 98.8 | 96.6 | 97.6 | 97.1 | 99.28 | 74.8 | 96.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrzykowski, Z.; Wielgosz, M.; Breitsprecher, M. Navigators’ Behavior Analysis Using Data Mining. J. Mar. Sci. Eng. 2020, 8, 50. https://doi.org/10.3390/jmse8010050
Pietrzykowski Z, Wielgosz M, Breitsprecher M. Navigators’ Behavior Analysis Using Data Mining. Journal of Marine Science and Engineering. 2020; 8(1):50. https://doi.org/10.3390/jmse8010050
Chicago/Turabian StylePietrzykowski, Zbigniew, Miroslaw Wielgosz, and Marcin Breitsprecher. 2020. "Navigators’ Behavior Analysis Using Data Mining" Journal of Marine Science and Engineering 8, no. 1: 50. https://doi.org/10.3390/jmse8010050
APA StylePietrzykowski, Z., Wielgosz, M., & Breitsprecher, M. (2020). Navigators’ Behavior Analysis Using Data Mining. Journal of Marine Science and Engineering, 8(1), 50. https://doi.org/10.3390/jmse8010050