Ship-Collision Avoidance Decision-Making Learning of Unmanned Surface Vehicles with Automatic Identification System Data Based on Encoder—Decoder Automatic-Response Neural Networks


Abstract
:1. Introduction
2. Materials and Methods
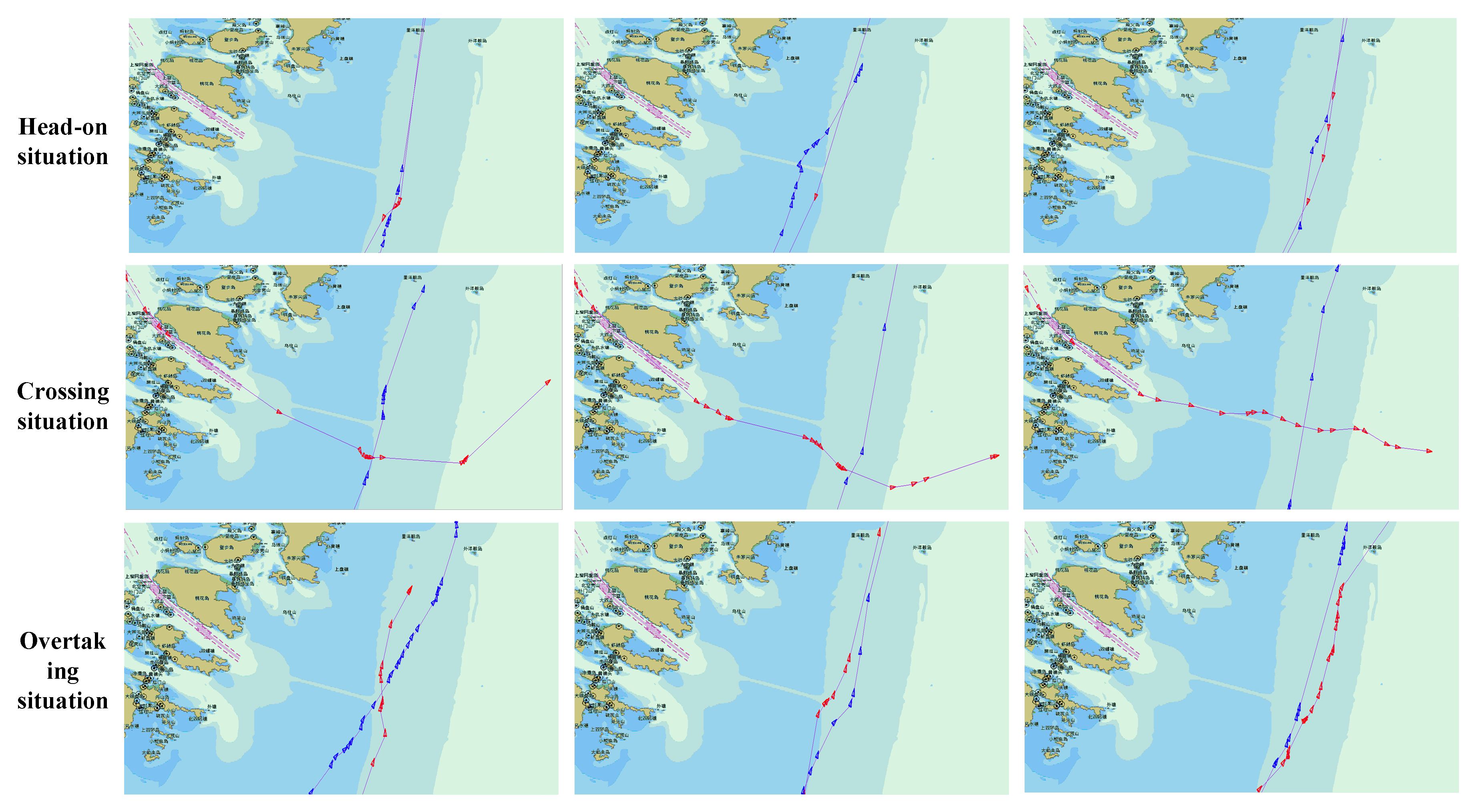
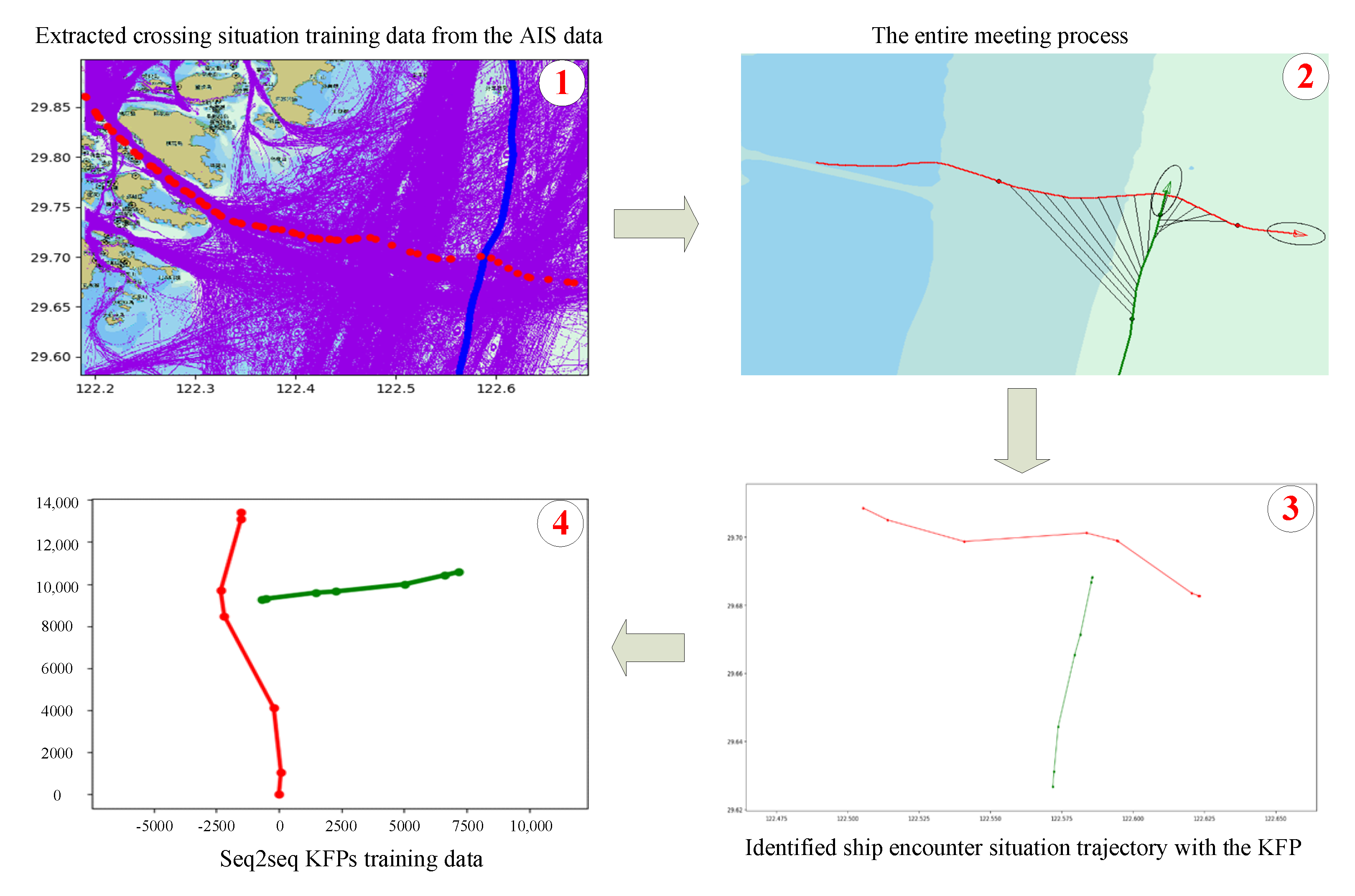
2.1. Trajectory Data Identification of Ship Encounters
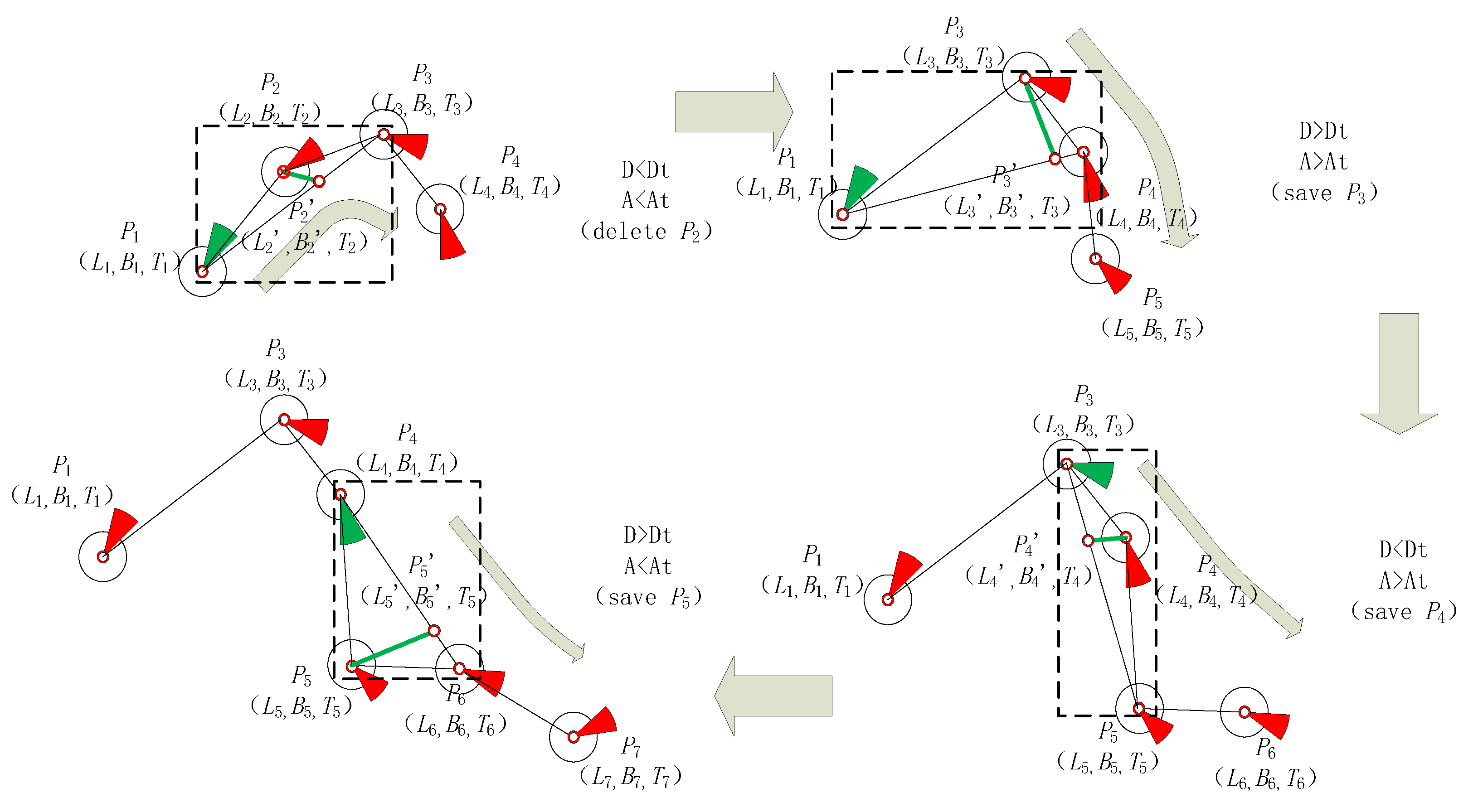
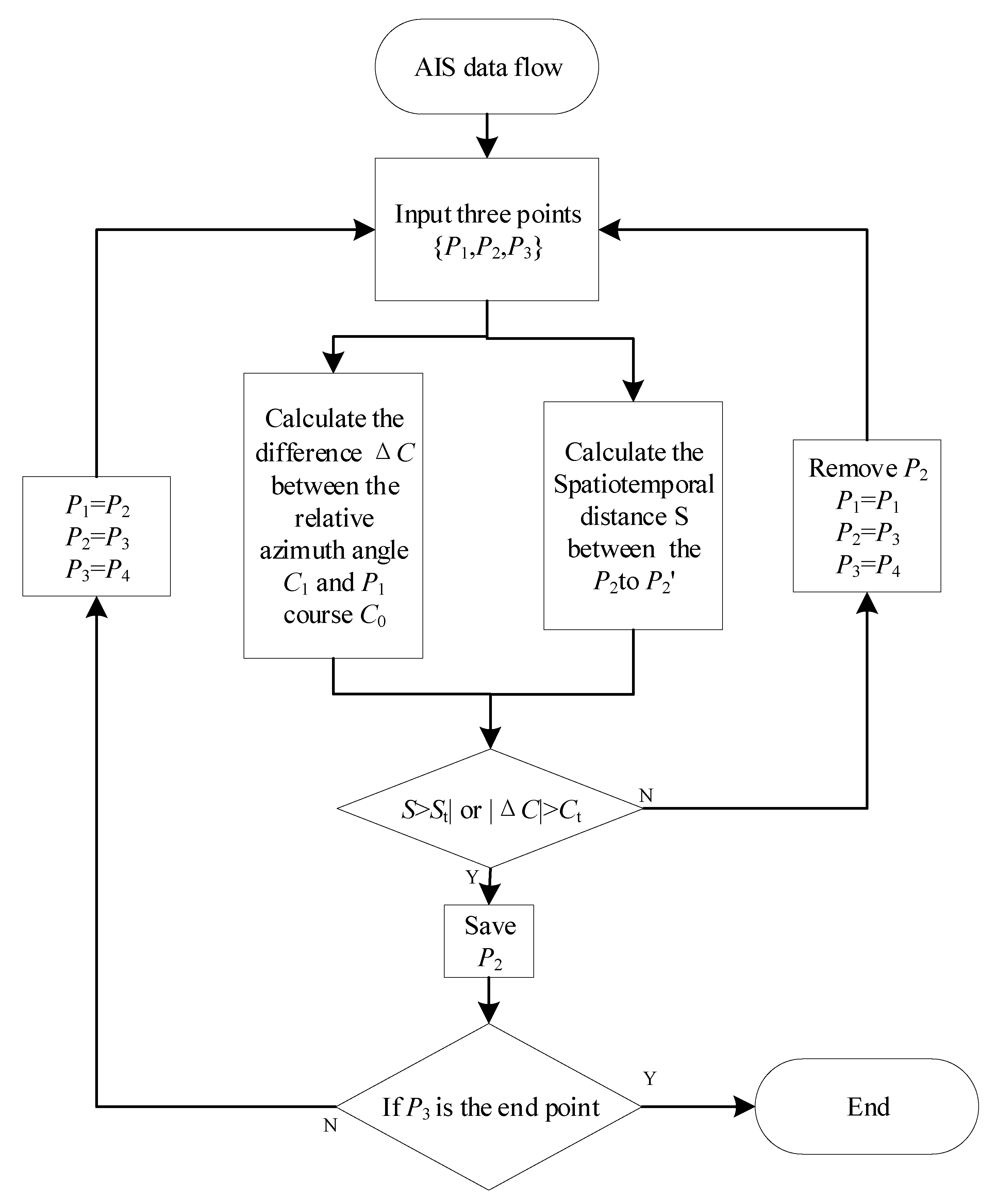
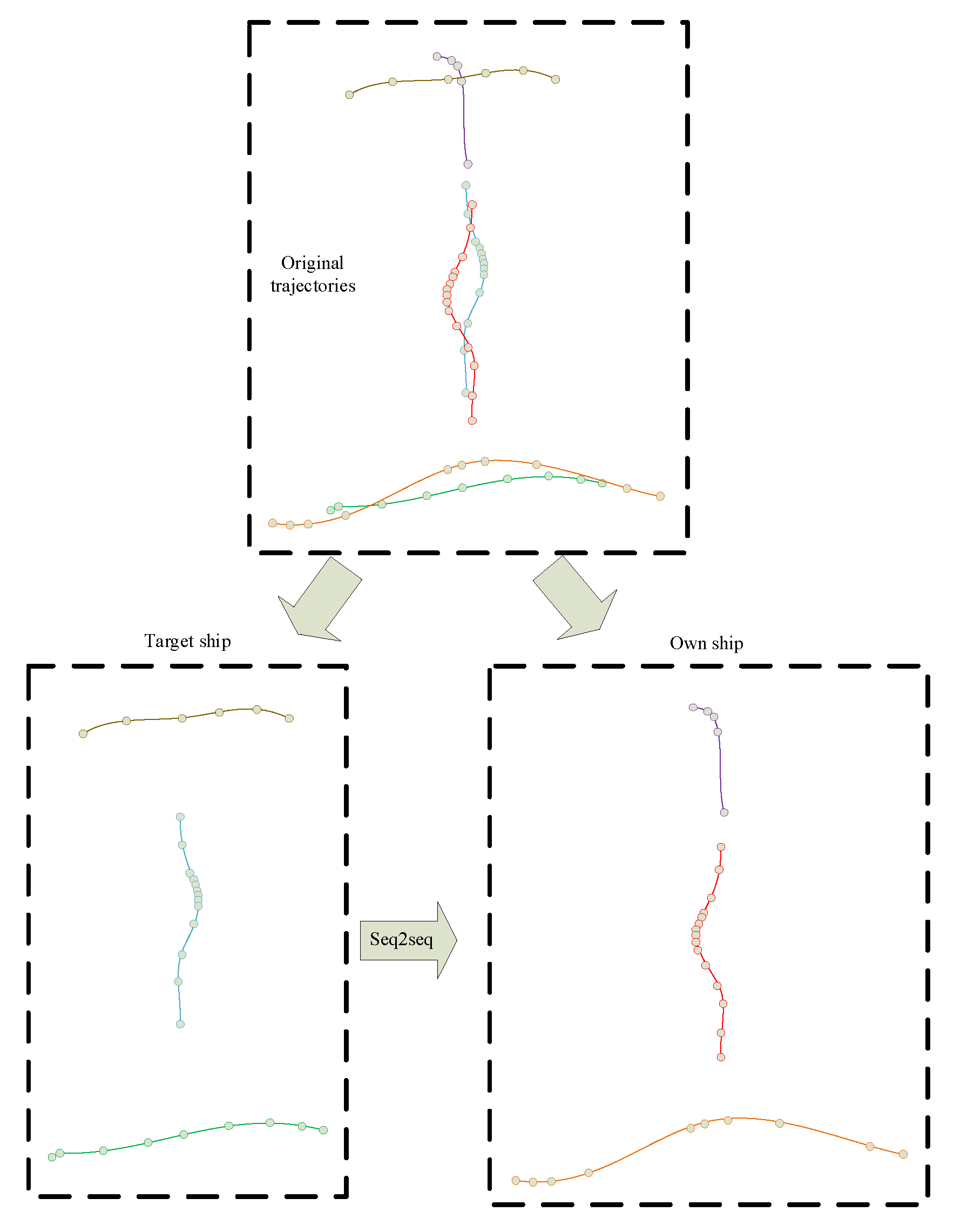
2.2. Key Feature-Point Extraction from the Ship-Encounter Trajectories
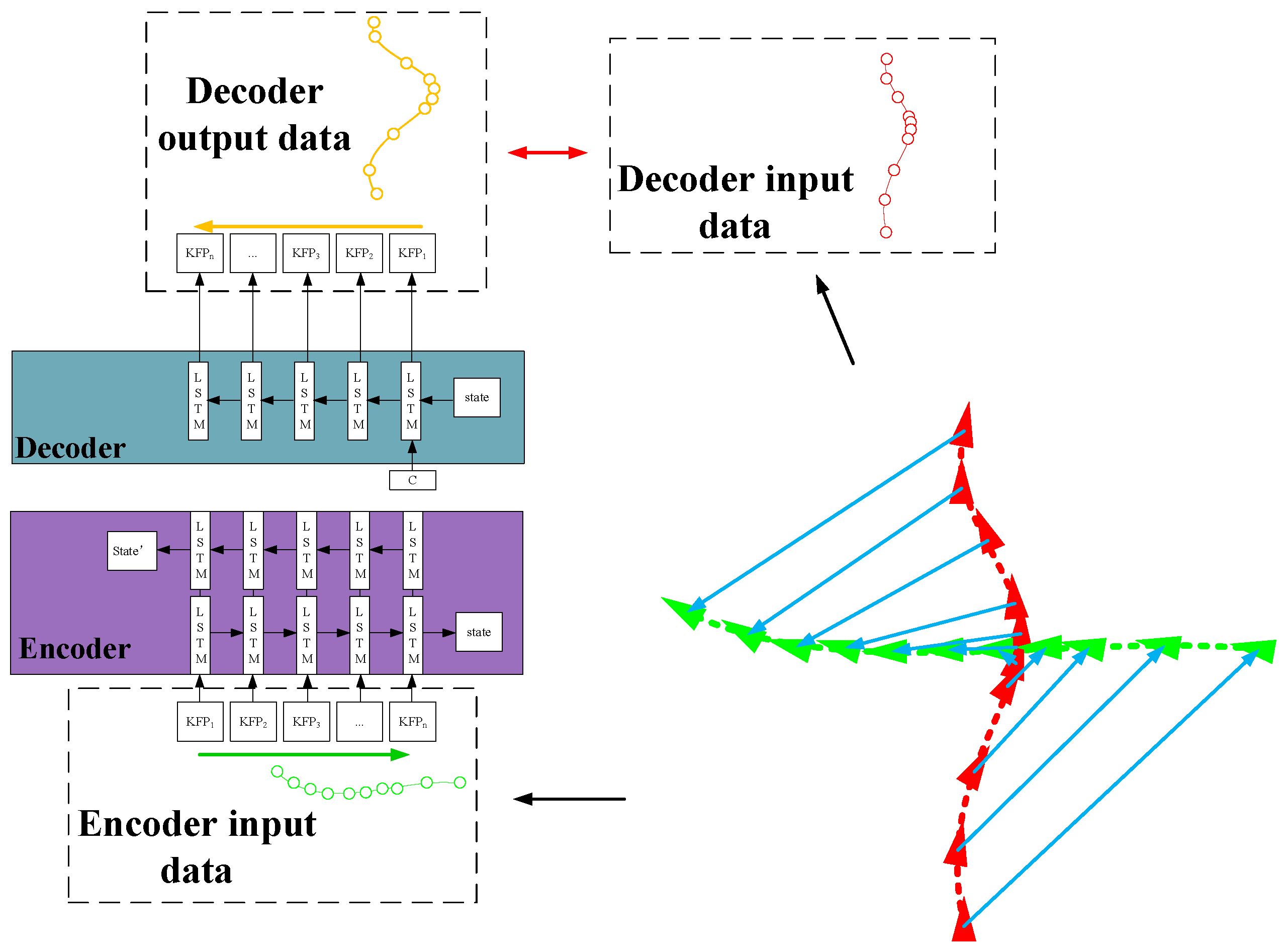
2.3. Decoder–Encoder Automatic-Response Neural Networks
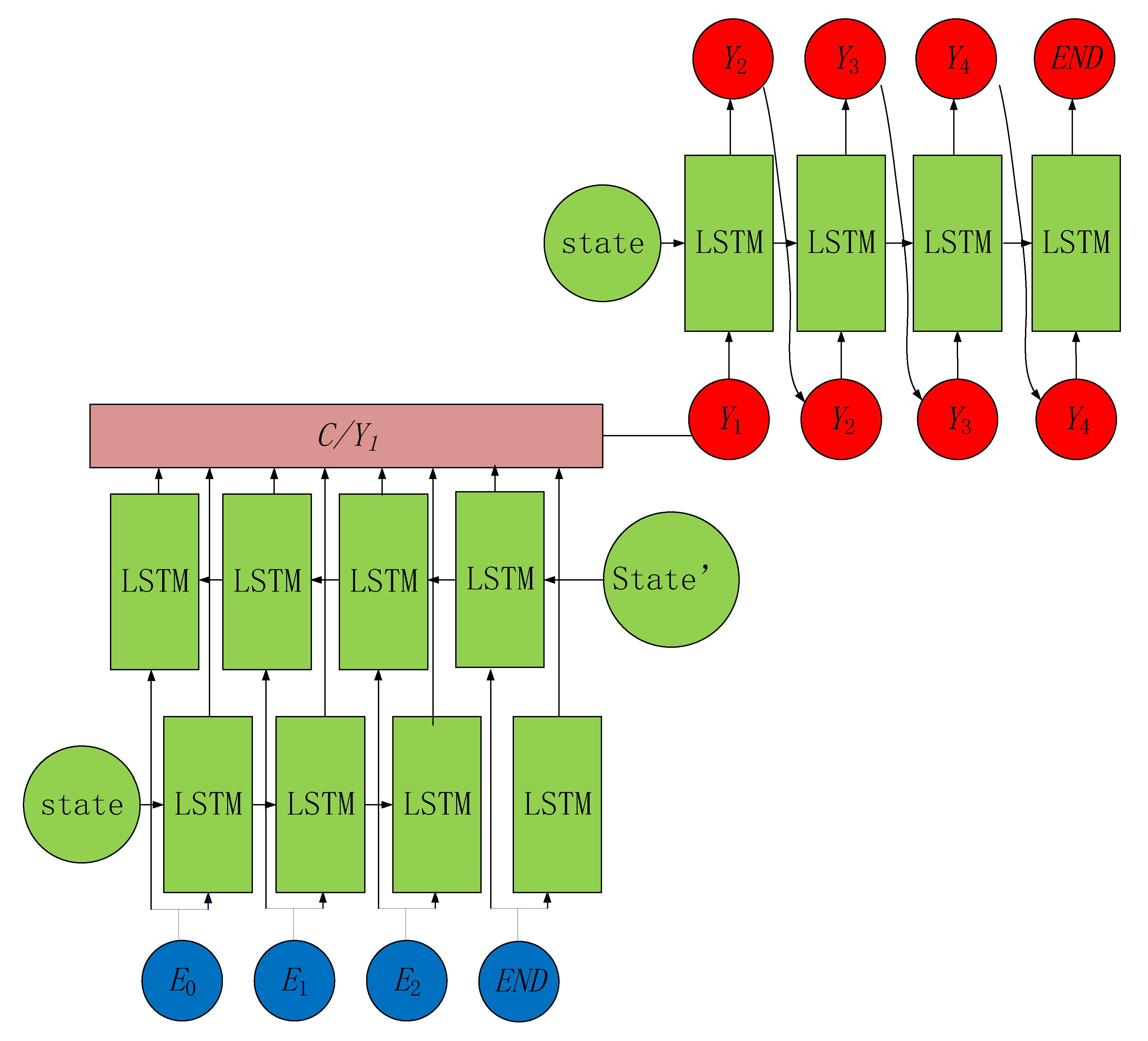
2.3.1. Sequence-to-Sequence (Seq2Seq) Model
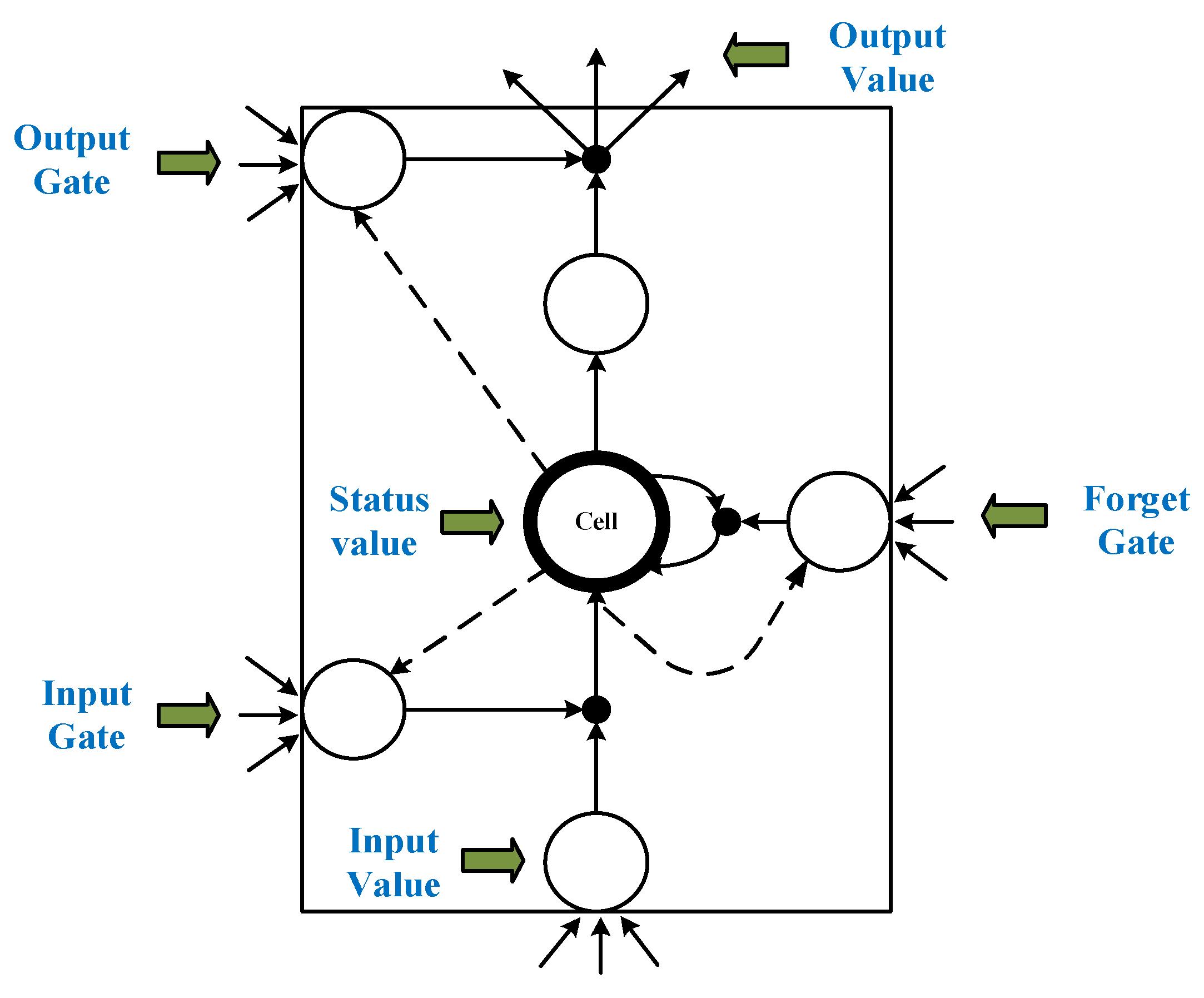
2.3.2. Bidirectional Long Short-Term Memory Recurrent Neural Networks (Bi-LSTM RNN) Structure
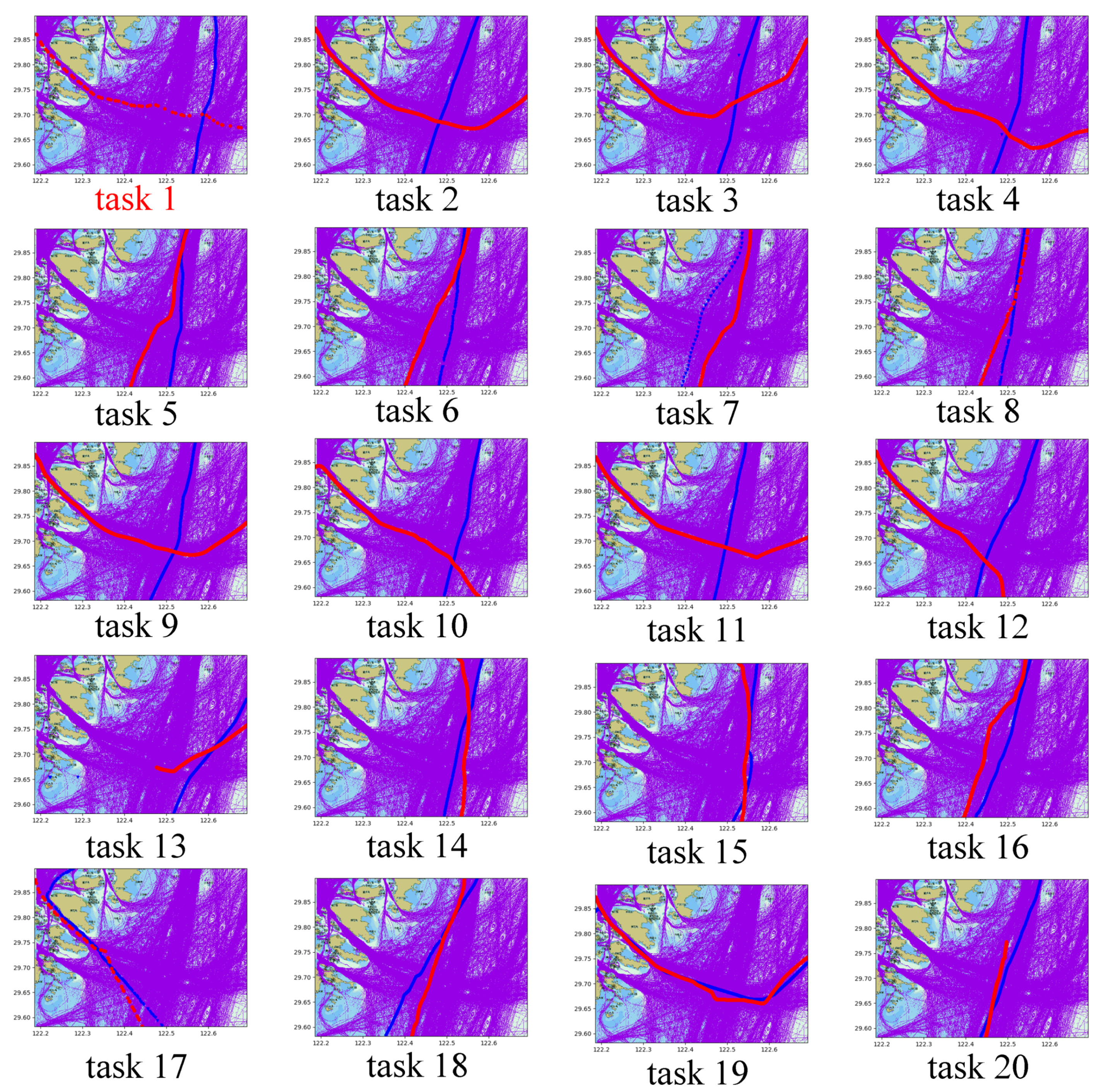
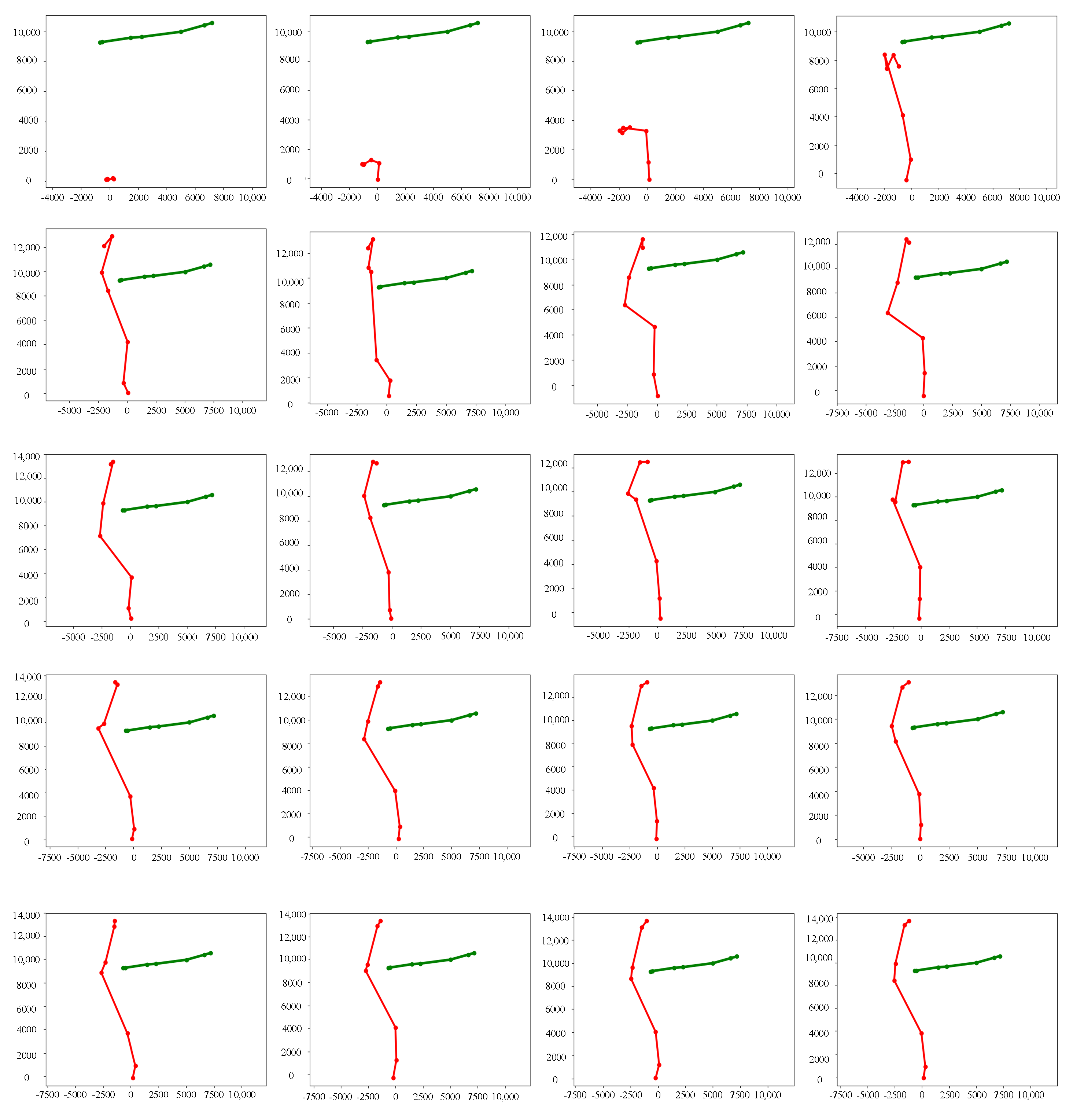
3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kose, K.; Yang, C.; Ishioka, Y.; Kato, Y.; Nagasawa, A.; Hara, K. A Collision Avoidance Expert System for Integrated Navigation System and Its Brush-up. J. Soc. Nav. Arch. Jpn. 1995, 399–407. [Google Scholar] [CrossRef]
- Inaish, M. Building Method and Application of Neural Network System for Navigation. Navigation 1993, 115, 12–13. [Google Scholar]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Fuzzy-logic based parallel collisions avoidance decision formulation for an ocean navigational system. IFAC Proc. Vol. 2010, 43, 260–265. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe maritime autonomous navigation With COLREGS, using velocity obstacles. IEEE J. Ocean. Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Wołejsza, P.; Borkowski, P. Decision support in collision situations at sea. J. Navig. 2017, 70, 447–464. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, X.; Zheng, Y.; Du, A.Y. An autonomous path planning model for unmanned ships based on deep reinforcement learning. Sensors 2020, 20, 426. [Google Scholar] [CrossRef] [Green Version]
- Simsir, U.; Amasyal, M.F.; Bal, M.; Çelebi, U.B.; Ertugrul, S. Decision support system for collision avoidance of vessels. Appl. Soft Comput. 2014, 25, 369–378. [Google Scholar] [CrossRef]
- Bakdi, A.; Glad, I.K.; Vanem, E.; Engelhardtsen, Ø. AIS-Based Multiple Vessel Collision and Grounding Risk Identification based on Adaptive Safety Domain. J. Mar. Sci. Eng. 2019, 8, 5. [Google Scholar] [CrossRef] [Green Version]
- Jansson, J.; Gustafsson, F. A framework and automotive application of collision avoidance decision making. Automatica 2008, 44, 2347–2351. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M. A collision avoidance algorithm for ship guidance applications. J. Mar. Eng. Technol. 2019, 19, 62–75. [Google Scholar] [CrossRef]
- Zaccone, R.; Martelli, M.; Figari, M. A colreg-compliant ship collision avoidance algorithm. In Proceedings of the 18th European Control Conference (ECC 2019), Napoli, Italy, 25–28 June 2019; pp. 2530–2535. [Google Scholar]
- Chiang, H.-T.L.; Tapia, L. COLREG-RRT: An RRT-Based COLREGS-Compliant Motion Planner for Surface Vehicle Navigation. IEEE Robot. Autom. Lett. 2018, 3, 2024–2031. [Google Scholar] [CrossRef]
- Fang, M.-C.; Tsai, K.-Y.; Fang, C.-C. A Simplified Simulation Model of Ship Navigation for Safety and Collision Avoidance in Heavy Traffic Areas. J. Navig. 2017, 71, 837–860. [Google Scholar] [CrossRef]
- Hu, L.; Naeem, W.; Rajabally, E.; Watson, G.; Mills, T.; Bhuiyan, Z.; Raeburn, C.; Salter, I.; Pekcan, C. A Multiobjective Optimization Approach for COLREGs-Compliant Path Planning of Autonomous Surface Vehicles Verified on Networked Bridge Simulators. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Tsou, M.-C.; Hsueh, C.-K. The study of ship collision avoidance route planning by ant colony algorithm. J. Mar. Sci. Technol. 2010, 18, 746–756. [Google Scholar]
- Lazarowska, A. Ship’s Trajectory Planning for Collision Avoidance at Sea Based on Ant Colony Optimisation. J. Navig. 2014, 68, 291–307. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Tang, P.; Su, Y.; Li, X.; Yang, G.; Shi, C. An adaptive obstacle avoidance algorithm for unmanned surface vehicle in complicated marine environments. IEEE/CAA J. Autom. Sin. 2014, 1, 385–396. [Google Scholar]
- Perera, L.P.; Ferrari, V.; Castro-Santos, L.; Hinostroza, M.A.; Soares, C.G. Experimental Evaluations on Ship Autonomous Navigation and Collision Avoidance by Intelligent Guidance. IEEE J. Ocean. Eng. 2014, 40, 374–387. [Google Scholar] [CrossRef]
- Jones, K.D. Practical manoeuvres to avoid collision at sea. J. Navig. 1971, 24, 60–66. [Google Scholar] [CrossRef]
- Liu, D.; Zhang, J.; Wang, F. Meeting situation decision modelling in ship intelligent collision avoidance decision system. In Proceedings of the Chinese Navigation Society-2004 Academic Exchange Conference; China Institute of Navigation: Beijing, China, 2004; pp. 118–123. [Google Scholar]
- Zhao, L.; Shi, G. A method for simplifying ship trajectory based on improved Douglas–Peucker algorithm. Ocean Eng. 2018, 166, 37–46. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.-Y. Ship Spatiotemporal Key Feature Point Online Extraction Based on AIS Multi-Sensor Data Using an Improved Sliding Window Algorithm. Sensors 2019, 19, 2706. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kumar, J.; Goomer, R.; Singh, A.K. Long Short Term Memory Recurrent Neural Network (LSTM-RNN) Based Workload Forecasting Model for Cloud Datacenters. Procedia Comput. Sci. 2018, 125, 676–682. [Google Scholar] [CrossRef]
- Liu, C.; Wang, Y.; Kumar, K.; Gong, Y. Investigations on speaker adaptation of LSTM RNN models for speech recognition. In Proceedings of the International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; pp. 5020–5024. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Shi, G.-Y.; Li, S. Online Prediction of Ship Behavior with Automatic Identification System Sensor Data Using Bidirectional Long Short-Term Memory Recurrent Neural Network. Sensors 2018, 18, 4211. [Google Scholar] [CrossRef] [PubMed] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encounter Pattern | Distance (n mile) | Time to the Closest Point of Approach (TCPA) (s) | Distance to the Closest Point of Approach (DCPA) (n mile) | Encounter Situation | Difference of Heading ΔC (°) |
|---|---|---|---|---|---|
| A1-A1 | Dis < 6 | TCPA > 0 | DCPA < 1 | Head On | 174 < ΔC < 186 |
| A2-A1 | Dis < 6 | TCPA > 0 | DCPA < 1 | Head On | 174 < ΔC < 186 |
| A2-A2 | Dis < 6 | TCPA > 0 | DCPA < 1 | Head On | 174 < ΔC < 186 |
| B1-D | Dis < 6 | TCPA > 0 | DCPA < 2 | Crossing | |
| B1-A | Dis < 6 | TCPA > 0 | DCPA < 2 | Crossing | |
| B2-D | Dis < 6 | TCPA > 0 | DCPA < 2 | Crossing | |
| B2-A | Dis < 6 | TCPA > 0 | DCPA < 2 | Crossing | |
| C1-A | Dis < 4 | TCPA > 0 | DCPA < 3 | Overtaking | S1 < S2cos(ΔC) |
| C1-B1 | Dis < 4 | TCPA > 0 | DCPA < 3 | Overtaking | S1 < S2cos(ΔC) |
| C1-D2 | Dis < 4 | TCPA > 0 | DCPA < 3 | Overtaking | S1 < S2cos(ΔC) |
| C2-A | Dis < 4 | TCPA > 0 | DCPA < 3 | Overtaking | S1 < S2cos(ΔC) |
| C2-B1 | Dis < 4 | TCPA > 0 | DCPA < 3 | Overtaking | S1 < S2cos(ΔC) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, M.; Shi, G.-Y. Ship-Collision Avoidance Decision-Making Learning of Unmanned Surface Vehicles with Automatic Identification System Data Based on Encoder—Decoder Automatic-Response Neural Networks. J. Mar. Sci. Eng. 2020, 8, 754. https://doi.org/10.3390/jmse8100754
Gao M, Shi G-Y. Ship-Collision Avoidance Decision-Making Learning of Unmanned Surface Vehicles with Automatic Identification System Data Based on Encoder—Decoder Automatic-Response Neural Networks. Journal of Marine Science and Engineering. 2020; 8(10):754. https://doi.org/10.3390/jmse8100754
Chicago/Turabian StyleGao, Miao, and Guo-You Shi. 2020. "Ship-Collision Avoidance Decision-Making Learning of Unmanned Surface Vehicles with Automatic Identification System Data Based on Encoder—Decoder Automatic-Response Neural Networks" Journal of Marine Science and Engineering 8, no. 10: 754. https://doi.org/10.3390/jmse8100754
APA StyleGao, M., & Shi, G. -Y. (2020). Ship-Collision Avoidance Decision-Making Learning of Unmanned Surface Vehicles with Automatic Identification System Data Based on Encoder—Decoder Automatic-Response Neural Networks. Journal of Marine Science and Engineering, 8(10), 754. https://doi.org/10.3390/jmse8100754