Assessing the Accuracy of Underwater Photogrammetry for Archaeology: A Comparison of Structure from Motion Photogrammetry and Real Time Kinematic Survey at the East Key Construction Wreck


Abstract
:1. Introduction
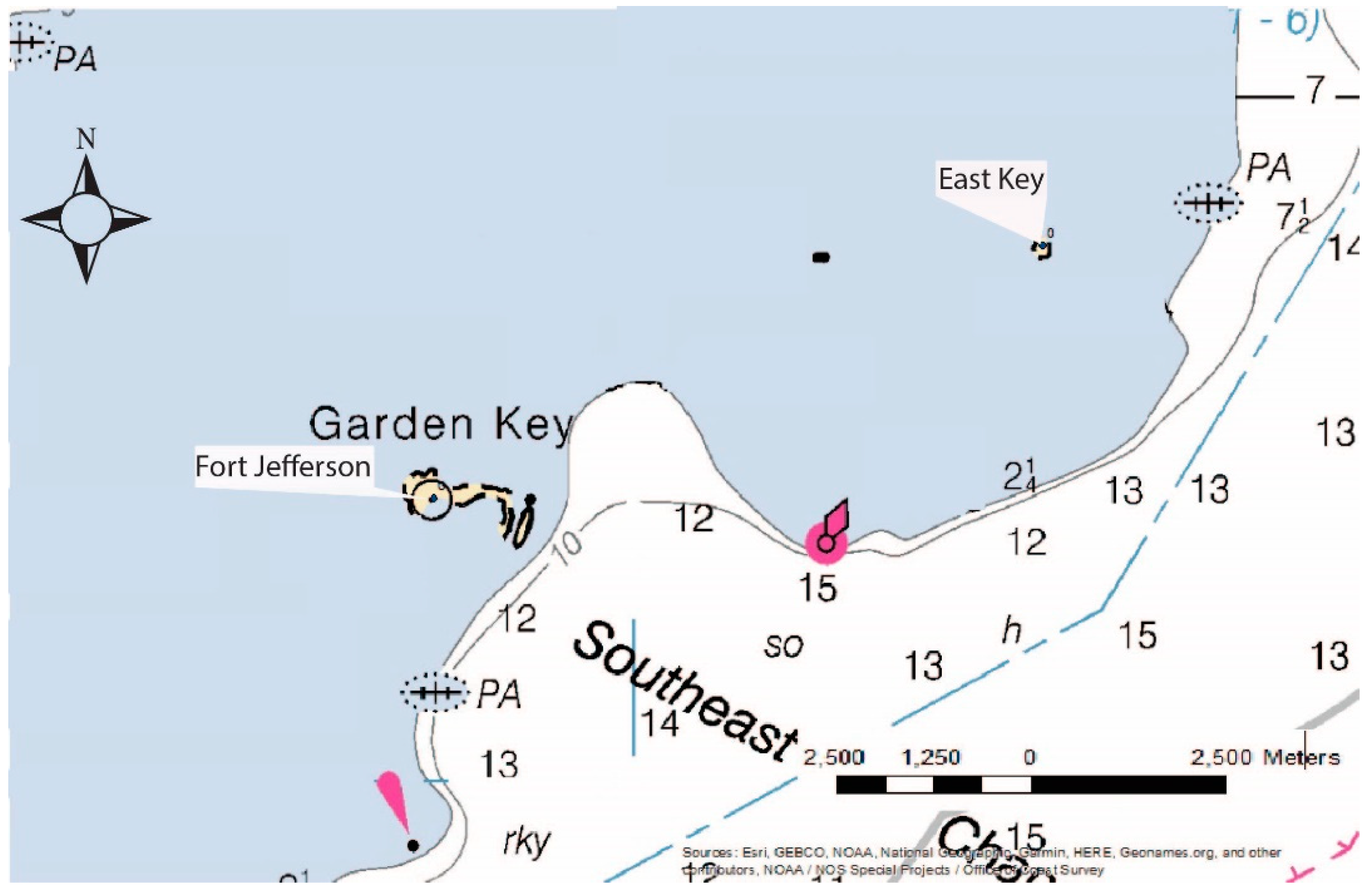
Historical Context
2. Materials and Methods
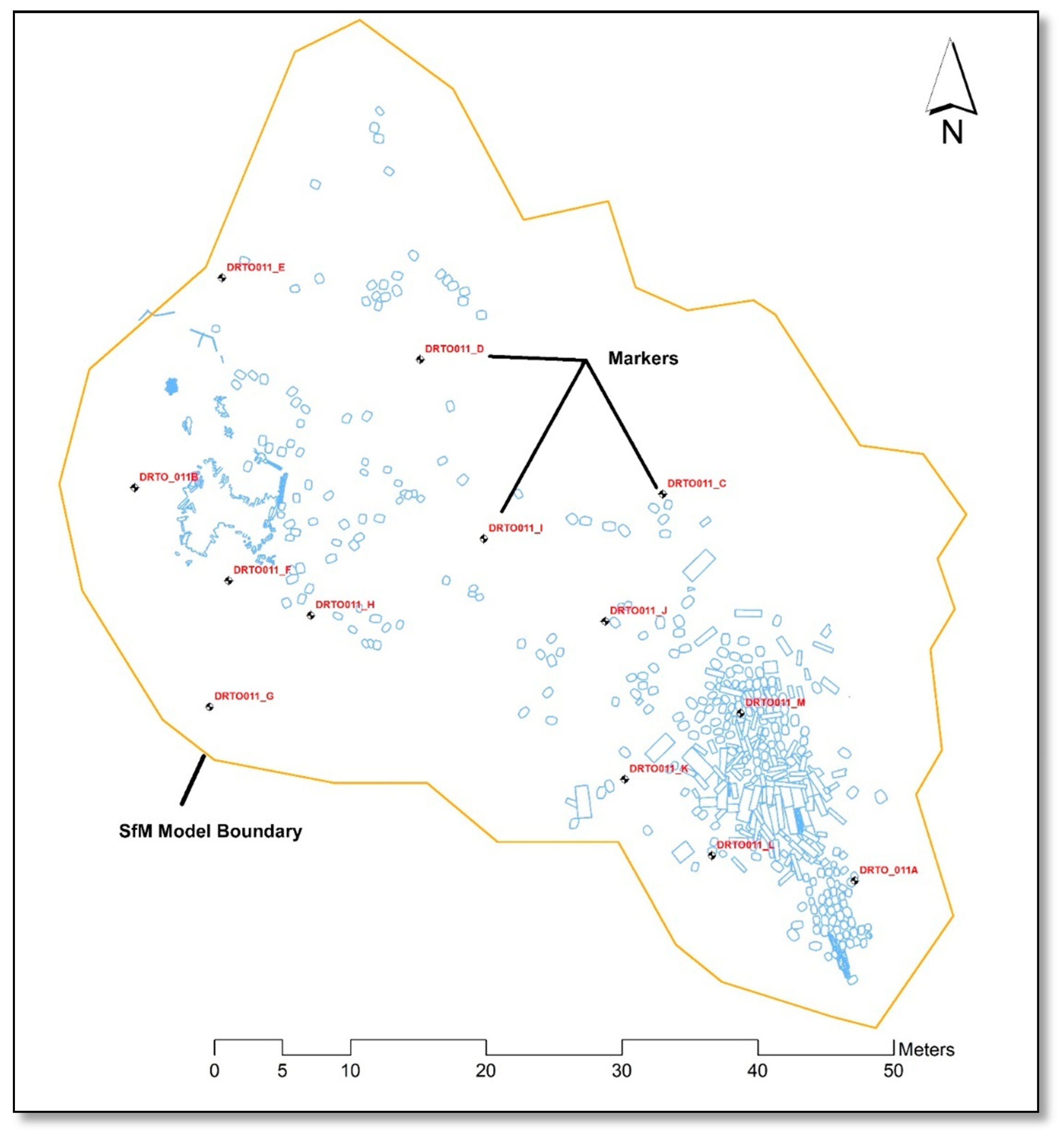
2.1. Real Time Kinematic (RTK) Survey and Measurements
2.2. Hand Measurement Methodology
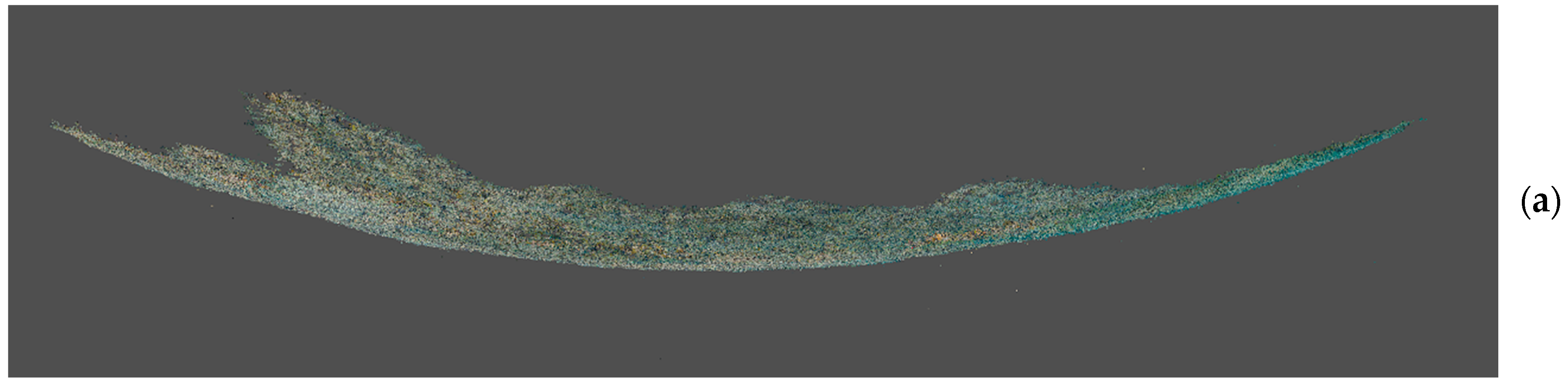
2.3. SeaArray Methodology
3. Results
3.1. Difference between RTK and SfM Model
3.2. Statistical Analysis
3.3. Difference between Artifact Hand Measurements and Artifact SfM Measurements
4. Discussion
4.1. Accuracy and Precision
4.2. The Bowling Effect
4.3. Photogrammetry Models vs. Hand Mapping
4.4. Lessons Learned and Future Research
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- Aragón, E.; Munar, S.; Rodríguez, J.; Yamafune, K. Underwater photogrammetric monitoring techniques for mid-depth shipwrecks. J. Cult. Herit. 2018, 34, 255–260. [Google Scholar] [CrossRef]
- Balletti, C.; Beltrame, C.; Costa, E.; Guerra, F.; Vernier, P. 3D reconstruction of marble shipwreck cargoes based on underwater multi-image photogrammetry. Digit. Appl. Archaeol. Cult. Herit. 2016, 3, 1–8. [Google Scholar] [CrossRef]
- Boyer, T.; Lockhart, B. Seeing Life in 3D: Digital Recording of HMS Erebus. Advis. Counc. Underw. Archaeol. 2020, in press. [Google Scholar]
- Henderson, J.; Pizarro, O.; Johnson-Roberson, M.; Mahon, I. Mapping Submerged Archaeological Sites using Stereo-Vision Photogrammetry. Int. J. Naut. Archaeol. 2013, 58, 243–256. [Google Scholar] [CrossRef]
- Liarokapis, F.; Kouřil, P.; Agrafiotis, S.; Liarokapis, S.; Chmelík, J.; Skarlatos, D. 3D Modelling and Mapping for Virtual Exploration of Underwater Archaeology Assets. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 425–431. [Google Scholar] [CrossRef] [Green Version]
- McCarthy, J.; Benjamin, J. Multi-image Photogrammetry for Underwater Archaeological Site Recording: An Accessible, Diver-Based Approach. J. Marit. Archaeol. 2014, 9, 95–114. [Google Scholar] [CrossRef]
- Pacheco-Ruiz, R.; Adams, J.; Pedrotti, F.; Grant, M.; Holmlund, J.; Bailey, C. Deep sea archaeological survey in the Black Sea – Robotic documentation of 2,500 years of human seafaring. Deep Sea Res. Part I Oceanogr. Res. Pap. 2019, 152, 1–16. [Google Scholar] [CrossRef]
- Yamafune, K.; Castro, F. Multi-Image Photogrammetry to Record and Reconstruct Underwater Shipwreck Sites. J. Archaeol. Method Theory 2017, 23, 703–725. [Google Scholar] [CrossRef]
- Prado, E.; Gómez-Ballesteros, M.; Cobo, A.; Sánchez, F.; Rodriguez-Basalo, A.; Arrese, B.; Rodríguez-Cobo, L. 3D Modeling of Rio Miera Wreck Ship Merging Optical and Multibeam High Resolution Points Cloud. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 159–165. [Google Scholar] [CrossRef] [Green Version]
- Kan, H.; Katagiri, Y.; Yoshizaki, S.; Nagao, M.; Ono, R. Assessment and Significance of a World War II battle site: Recording the USS Emmons using a High-Resolution DEM combining Multibeam Bathymetry and SfM Photogrammetry. Int. J. Naut. Archaeol. 2018, 47, 267–280. [Google Scholar] [CrossRef] [Green Version]
- Meredith-Williams, M.G.; Haussman, N.; Bailey, G.N.; King, G.C.P.; Alsharekh, A.; Al Ghamdi, S.; Inglis, R.H. Mapping, modelling and predicting prehistoric coastal archaeology in the southern Red Sea using new applications of digital-imaging techniques. World Archaeol. 2014, 46, 10–24. [Google Scholar] [CrossRef]
- Wu, J.; Bingham, R.C.; Ting, S.; Yager, K.; Wood, Z.J.; Gambin, T.; Clark, C.M. Multi-AUV motion planning for archeological site mapping and photogrammetric reconstruction. J. Field Robot. 2019, 36, 1250–1269. [Google Scholar] [CrossRef]
- Repola, L.; Scotto di Carlo, N.; Signoretti, D.; Leidwanger, J. Virtual simulation of a late antique shipwreck at Marzamemi, Sicily: Integrated processes for 3D documentation, analysis and representation of underwater archaeological data. Archaeol. Prospect. 2018, 25, 99–109. [Google Scholar] [CrossRef]
- Skarlatos, D.; Menna, F.; Nocerino, E.; Agrafiotis, P. Precision Potential of Underwater Networks for Archaeological Excavation Through Trilateration and Photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Barry, P.; Coakley, R. Field accuracy test of RPAS photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 27–31. [Google Scholar] [CrossRef] [Green Version]
- Uysal, M.; Toprak, A.S.; Polat, N. DEM generation with UAV Photogrammetry and accuracy analysis in Sahitler hill. Measurement 2015, 73, 539–543. [Google Scholar] [CrossRef]
- Murphy, L.E.; Brewer, D.M.; Cockrell, W.A.; Day, F.E.; Davis, G.E.; Gould, R.A.; Jonsson, R.A.; Stone, P.A.; Sturges, W.; Souza, D.J.; et al. Dry Tortugas National Park Submerged Cultural Resources Assessment. U.S. Dep. Inter. Natl. Park Serv. 1993, 2, 297–313. [Google Scholar]
- Agisoft Metashape User Manual. Available online: https://www.agisoft.com/pdf/metashape-pro_1_6_en.pdf (accessed on 15 April 2020).
- Agisoft. The Mysterious Bowl Effect. Available online: https://www.agisoft.com/forum/index.php?topic=600.0#:~:text=Re%3A%20The%20mysterious%20′bowl%20effect’&text=Hello%20Patrice%2C,and%20fixed%20during%20photo%20alignment (accessed on 2 May 2020).
- Kuester, F.; Cultural Heritage Engineering Initiative, University of California, San Diego, CA, USA. Personal communication, 2020.
- Holt, P. An assessment of quality in underwater archaeological surveys using tape measurements. Int. J. Naut. Archaeol. 2003, 32, 246–251. [Google Scholar] [CrossRef]
| 1 | A high percentage of aligned photos creates models with higher accuracy and larger amounts of detail. |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Marker to Marker | RTK Measure | SfM Measure | Absolute Value Difference |
|---|---|---|---|
| A to B | 60.398 | 59.628 | 0.770 |
| A to C | 31.799 | 31.695 | 0.104 |
| A to D | 49.979 | 49.566 | 0.413 |
| A to F | 51.125 | 50.440 | 0.685 |
| A to G | 49.187 | 48.271 | 0.916 |
| A to H | 44.581 | 44.116 | 0.465 |
| A to I | 37.162 | 37.010 | 0.152 |
| A to J | 26.515 | 26.455 | 0.060 |
| A to K | 18.524 | 18.472 | 0.052 |
| A to L | 10.772 | 10.682 | 0.090 |
| A to M | 15.078 | 14.919 | 0.159 |
| B to C | 38.872 | 38.990 | 0.188 |
| B to D | 23.048 | 23.242 | 0.194 |
| B to F | 9.730 | 9.817 | 0.087 |
| B to G | 17.053 | 17.100 | 0.047 |
| B to H | 15.998 | 16.081 | 0.083 |
| B to I | 25.974 | 26.143 | 0.169 |
| B to J | 36.002 | 36.090 | 0.088 |
| B to K | 41.970 | 41.776 | 0.194 |
| B to L | 50.392 | 49.930 | 0.462 |
| B to M | 47.618 | 47.286 | 0.332 |
| C to D | 20.419 | 20.444 | 0.025 |
| C to F | 32.590 | 32.612 | 0.022 |
| C to G | 36.846 | 36.699 | 0.147 |
| C to H | 27.417 | 27.472 | 0.055 |
| C to I | 19.579 | 13.627 | 0.048 |
| C to J | 10.293 | 10.264 | 0.029 |
| C to K | 21.196 | 21.210 | 0.014 |
| C to L | 26.891 | 26.840 | 0.051 |
| C to M | 17.249 | 17.056 | 0.193 |
| D to F | 21.557 | 21.642 | 0.085 |
| D to G | 29.915 | 29.900 | 0.015 |
| D to H | 20.502 | 20.564 | 0.062 |
| D to I | 14.011 | 14.015 | 0.004 |
| D to J | 23.611 | 23.612 | 0.001 |
| D to K | 34.390 | 34.308 | 0.082 |
| D to L | 42.389 | 42.165 | 0.224 |
| D to M | 35.194 | 34.943 | 0.251 |
| F to G | 9.404 | 9.360 | 0.044 |
| F to H | 6.553 | 6.538 | 0.015 |
| F to I | 19.042 | 19.105 | 0.063 |
| F to J | 27.881 | 27.883 | 0.002 |
| F to K | 32.616 | 32.374 | 0.242 |
| F to L | 10.933 | 40.485 | 0.448 |
| F to M | 38.954 | 38.617 | 0.337 |
| G to H | 10.040 | 9.957 | 0.083 |
| G to I | 23.682 | 23.626 | 0.056 |
| G to J | 29.785 | 29.628 | 0.157 |
| G to K | 31.003 | 30.566 | 0.437 |
| G to L | 29.569 | 37.885 | 0.984 |
| G to M | 39.121 | 38.574 | 0.547 |
| H to I | 13.994 | 14.015 | 0.071 |
| H to J | 21.686 | 21.734 | 0.048 |
| H to K | 26.081 | 25.935 | 0.146 |
| H to L | 34.436 | 34.138 | 0.298 |
| H to M | 32.492 | 32.273 | 0.219 |
| I to J | 10.810 | 10.861 | 0.051 |
| I to K | 20.535 | 20.544 | 0.009 |
| I to L | 28.753 | 28.697 | 0.056 |
| I to M | 22.906 | 22.818 | 0.088 |
| J to K | 11.726 | 11.767 | 0.041 |
| J to L | 18.968 | 18.956 | 0.012 |
| J to M | 12.156 | 12.027 | 0.129 |
| K to L | 8.607 | 8.501 | 0.106 |
| K to M | 10.004 | 9.878 | 0.126 |
| L to M | 10.705 | 10.749 | 0.044 |
| Average Difference | 0.174327653 |
| Meaurement 1 (cm) | Meaurement 2 (cm) | Meaurement 3 (cm) | |||||||
| Hand | Viscore | Abs. Δ | Hand | Viscore | Abs. Δ | Hand | Viscore | Abs. Δ | |
| Slab #82 | 94 | 94.56 | 0.56 | 234 | 234.1 | 0.1 | --- | --- | --- |
| Slab #83 | 166 | 164.2 | 1.8 | 40 | 39.953 | 0.05 | --- | --- | --- |
| Slab #85 | 234 | 233.5 | 0.5 | 92 | 92.018 | 0.02 | --- | --- | --- |
| Slab #86 | 255 | 252.4 | 2.6 | 42 | 41.507 | 0.49 | --- | --- | --- |
| Slab #88 | 185 | 183.3 | 1.7 | 32 | 30.692 | 1.31 | --- | --- | --- |
| Pig Iron Bar #90 | 10 | 10.05 | 0.05 | 10 | 9.906 | 0.09 | 73 | 72.622 | 0.38 |
| Barrel Line Length #84 | 710 | 709.7 | 0.3 | --- | --- | --- | --- | --- | --- |
| Ave. Abs. Difference | 1.072857 | 0.343333 | 0.38 | ||||||
| Overall Barrel Width (cm) | Barrell Origin (cm) | Barrel Terminus (cm) | |||||||
| Hand | Viscore | Abs. Δ | Hand | Viscore | Abs. Δ | Hand | Viscore | Abs. Δ | |
| Barrel #1 | 67 | 66.051 | 0.949 | --- | --- | 0 | 67 | 66.051 | 0.949 |
| Barrel #2 | 62 | 63.197 | 1.2 | 74 | 73.703 | 0.297 | 136 | 136.9 | 0.9 |
| Barrel #3 | 65 | 64.7 | 0.3 | 141 | 140.8 | 0.2 | 206 | 205.5 | 0.5 |
| Barrel #4 | 63 | 63.9 | 0.9 | 207 | 207.1 | 0.1 | 270 | 271 | 1 |
| Barrel #5 | 69 | 65.8 | 3.2 | 278 | 281.4 | 3.4 | 347 | 347.2 | 0.2 |
| Barrel #6 | 66 | 64.3 | 1.7 | 348 | 348.8 | 0.8 | 414 | 413.1 | 0.9 |
| Barrel #7 | 67 | 65.1 | 1.9 | 430 | 430.5 | 0.5 | 497 | 495.6 | 1.4 |
| Barrel #8 | 66 | 65.4 | 0.6 | 504 | 503.9 | 0.1 | 570 | 569.3 | 0.7 |
| Barrel #9 | 65 | 66 | 1 | 573 | 571.6 | 1.4 | 638 | 637.6 | 0.4 |
| Barrel #10 | 66 | 63.3 | 2.7 | 646 | 647.4 | 1.4 | 712 | 710.7 | 1.3 |
| Ave. Abs. Difference | 1.714286 | 1.1 | 0.842857 | ||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wright, A.E.; Conlin, D.L.; Shope, S.M. Assessing the Accuracy of Underwater Photogrammetry for Archaeology: A Comparison of Structure from Motion Photogrammetry and Real Time Kinematic Survey at the East Key Construction Wreck. J. Mar. Sci. Eng. 2020, 8, 849. https://doi.org/10.3390/jmse8110849
Wright AE, Conlin DL, Shope SM. Assessing the Accuracy of Underwater Photogrammetry for Archaeology: A Comparison of Structure from Motion Photogrammetry and Real Time Kinematic Survey at the East Key Construction Wreck. Journal of Marine Science and Engineering. 2020; 8(11):849. https://doi.org/10.3390/jmse8110849
Chicago/Turabian StyleWright, Anne E., David L. Conlin, and Steven M. Shope. 2020. "Assessing the Accuracy of Underwater Photogrammetry for Archaeology: A Comparison of Structure from Motion Photogrammetry and Real Time Kinematic Survey at the East Key Construction Wreck" Journal of Marine Science and Engineering 8, no. 11: 849. https://doi.org/10.3390/jmse8110849
APA StyleWright, A. E., Conlin, D. L., & Shope, S. M. (2020). Assessing the Accuracy of Underwater Photogrammetry for Archaeology: A Comparison of Structure from Motion Photogrammetry and Real Time Kinematic Survey at the East Key Construction Wreck. Journal of Marine Science and Engineering, 8(11), 849. https://doi.org/10.3390/jmse8110849