Collision Prevention Algorithm for Fishing Vessels Using mmWAVE Communication



Abstract
:1. Introduction
2. Application of mmWAVE Communication to Marine Environment
3. Construction of Collision Prevention Algorithm for Fishing Vessels
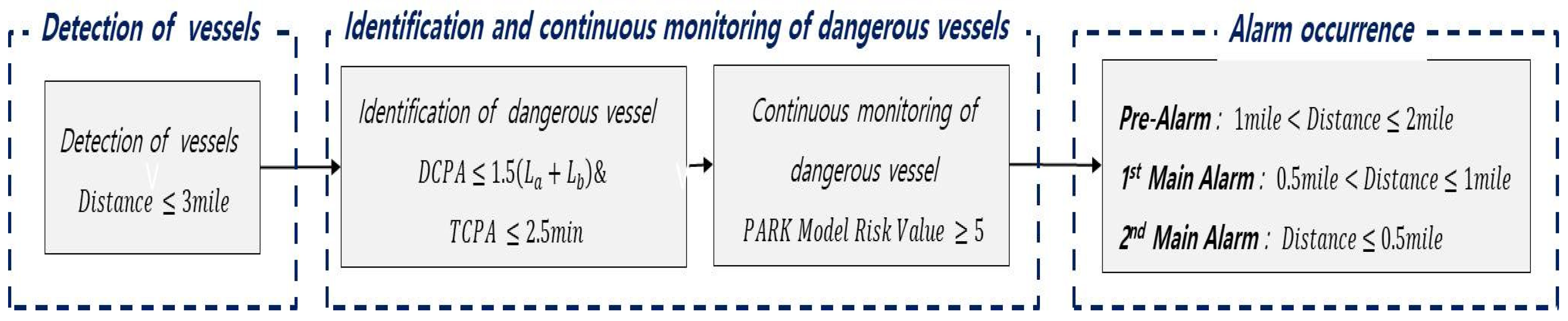
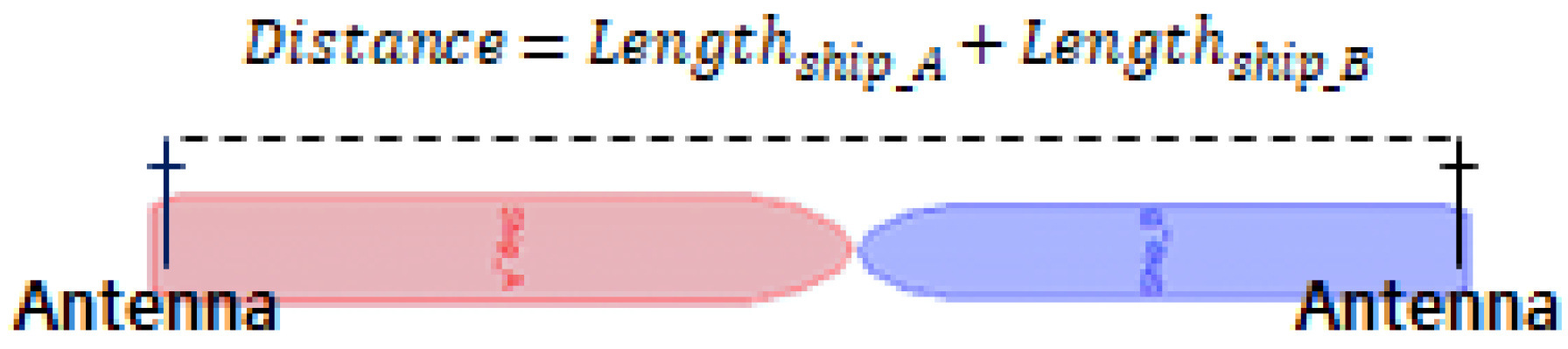
3.1. Calculation Range Setting
3.2. Primary Collision Warning Criteria Setting Based on DCPA and TCPA
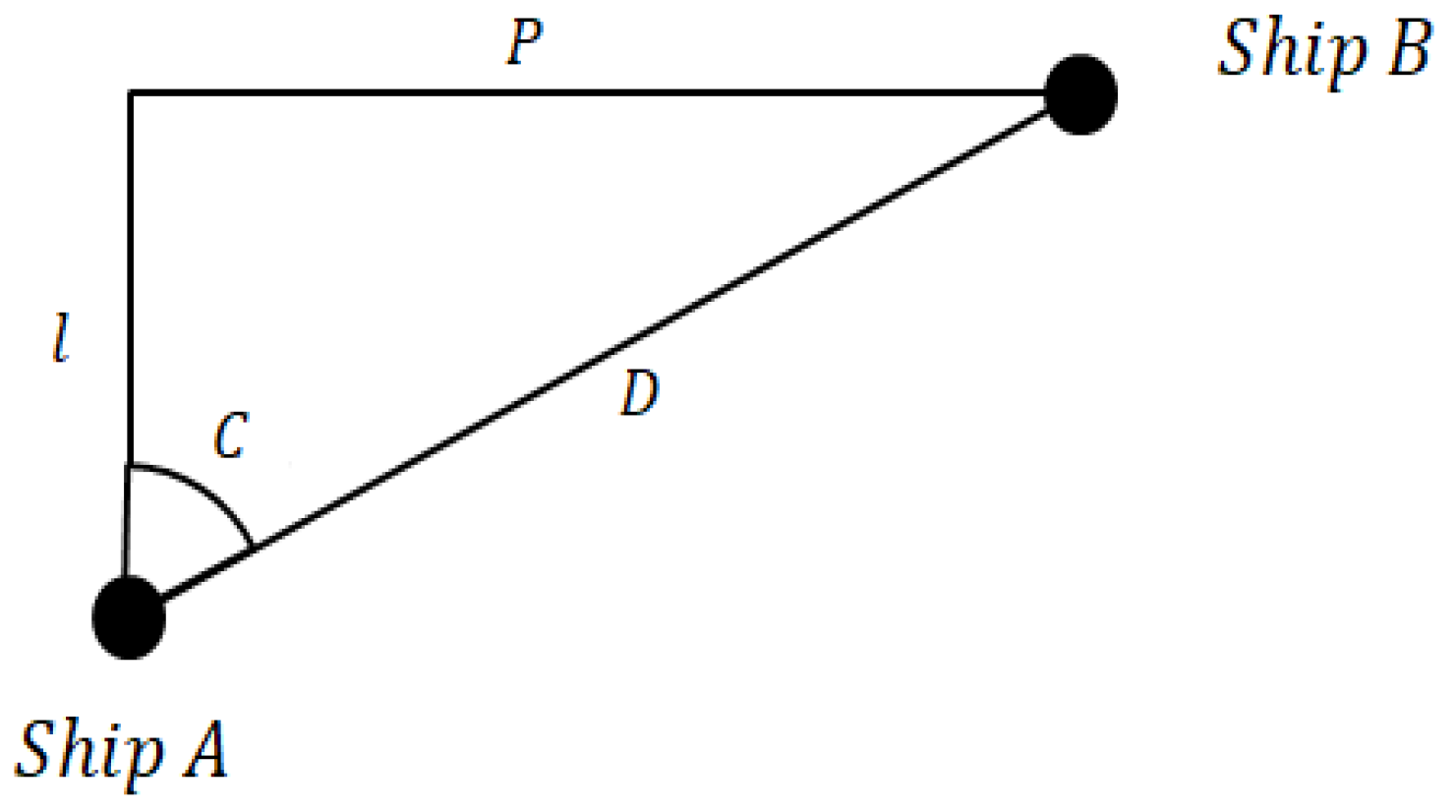
3.2.1. DCPA Criterion Setting
3.2.2. TCPA Criterion Setting
3.3. Secondary Collision Alarm Criteria Setting Based on Maritime Traffic Risk
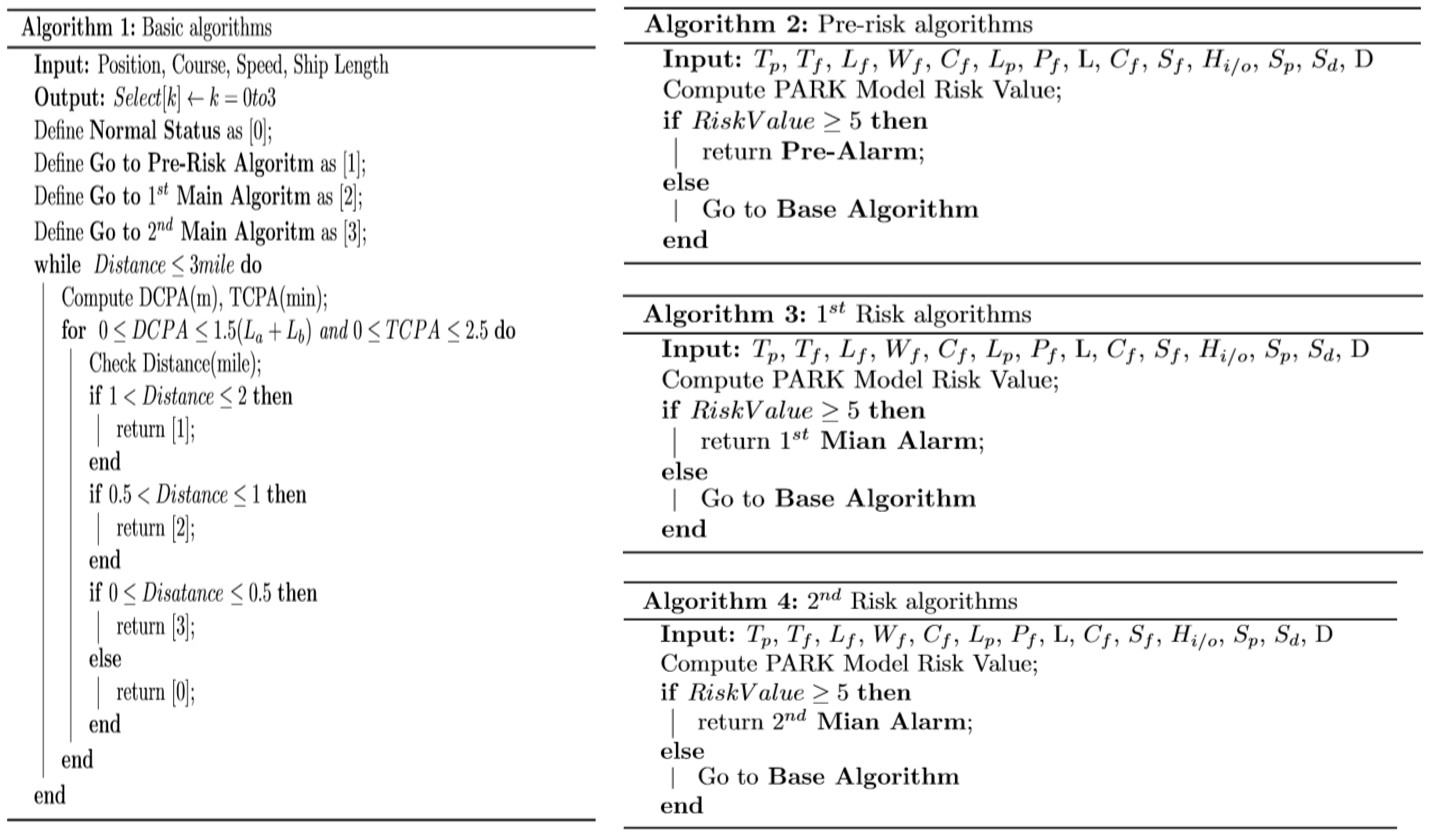
| : | Ship type factor | : | Ton factor | : | Length factor |
| : | Width factor | : | Career factor | : | License factor |
| : | Position factor | : | Target ship LOA | : | Crossing factor |
| : | Side factor | : | In/out harbor factor | : | Speed factor |
| : | Speed difference | : | Distance |
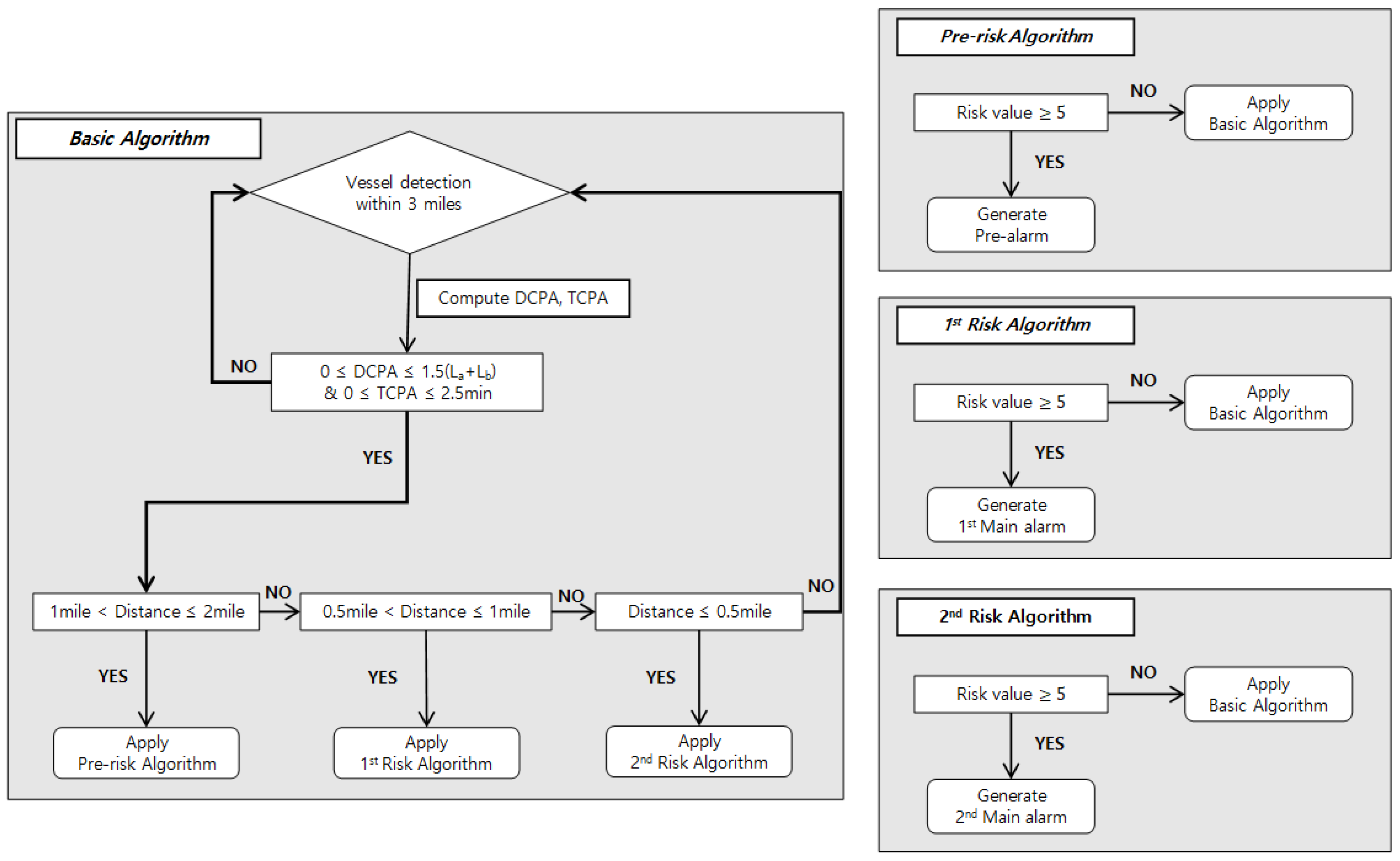
3.4. Final Algorithm Configuration
4. Verification of Collision Prevention Algorithm
4.1. Verification Through Simulation
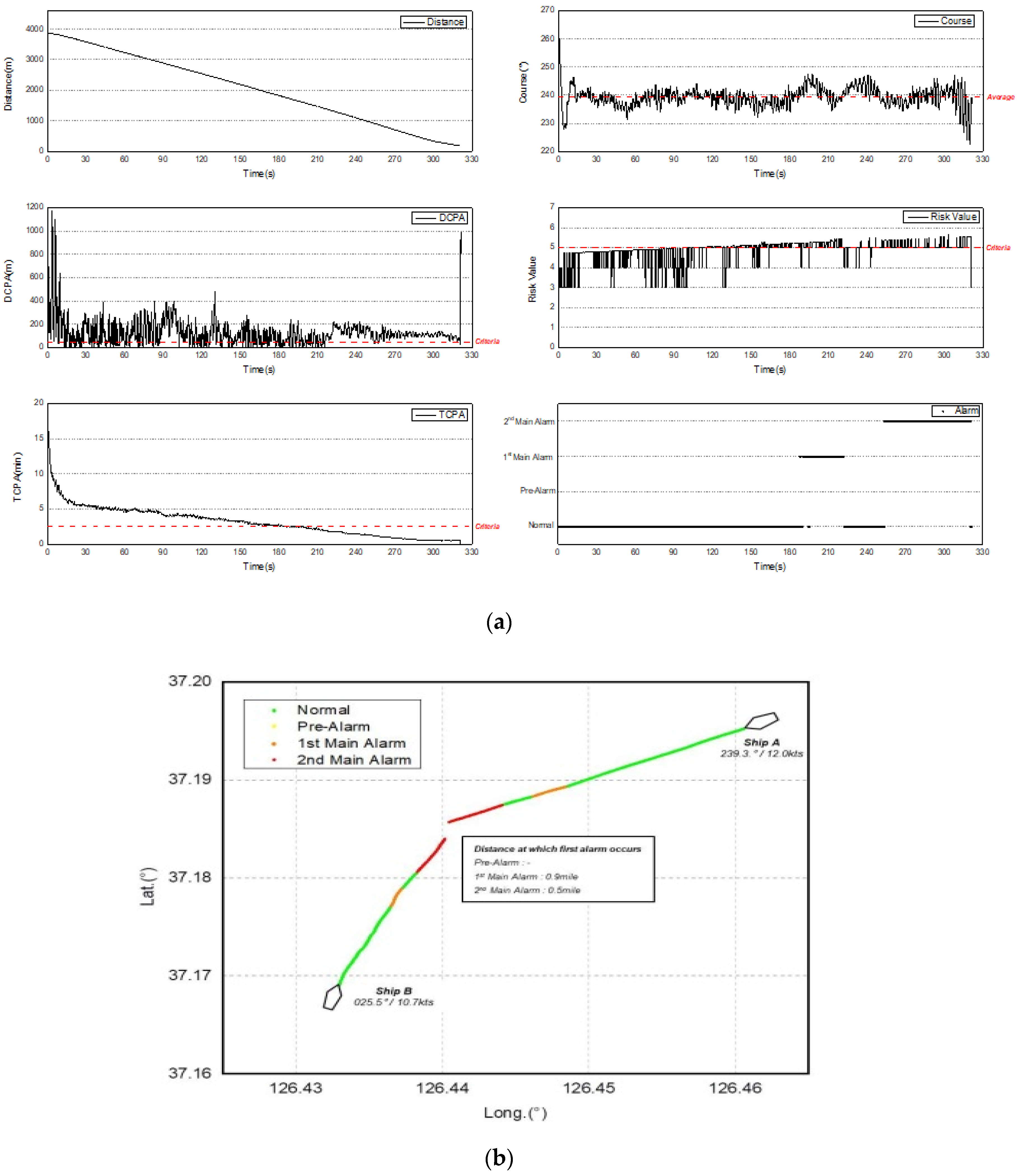
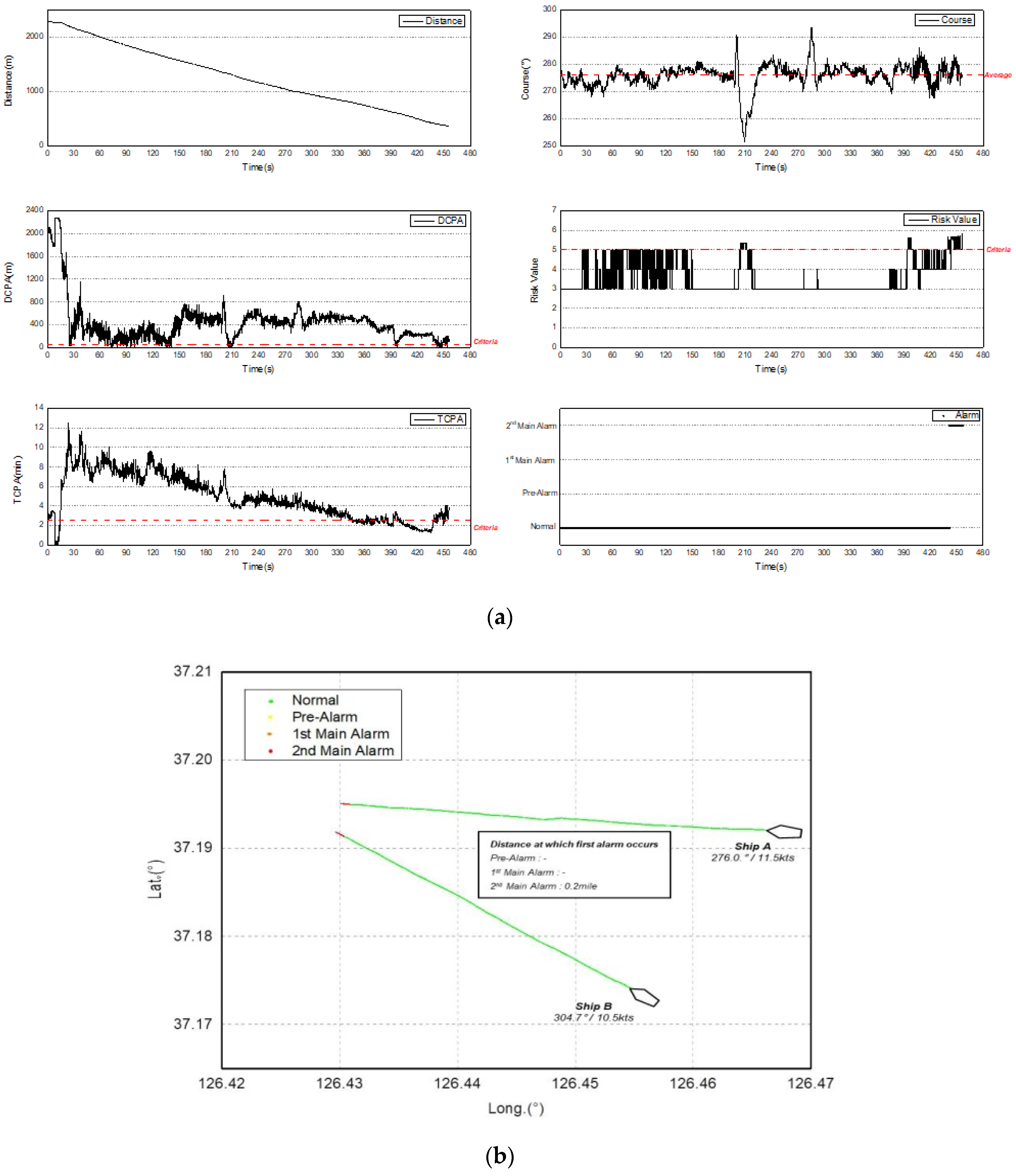
4.1.1. Simulation Overview
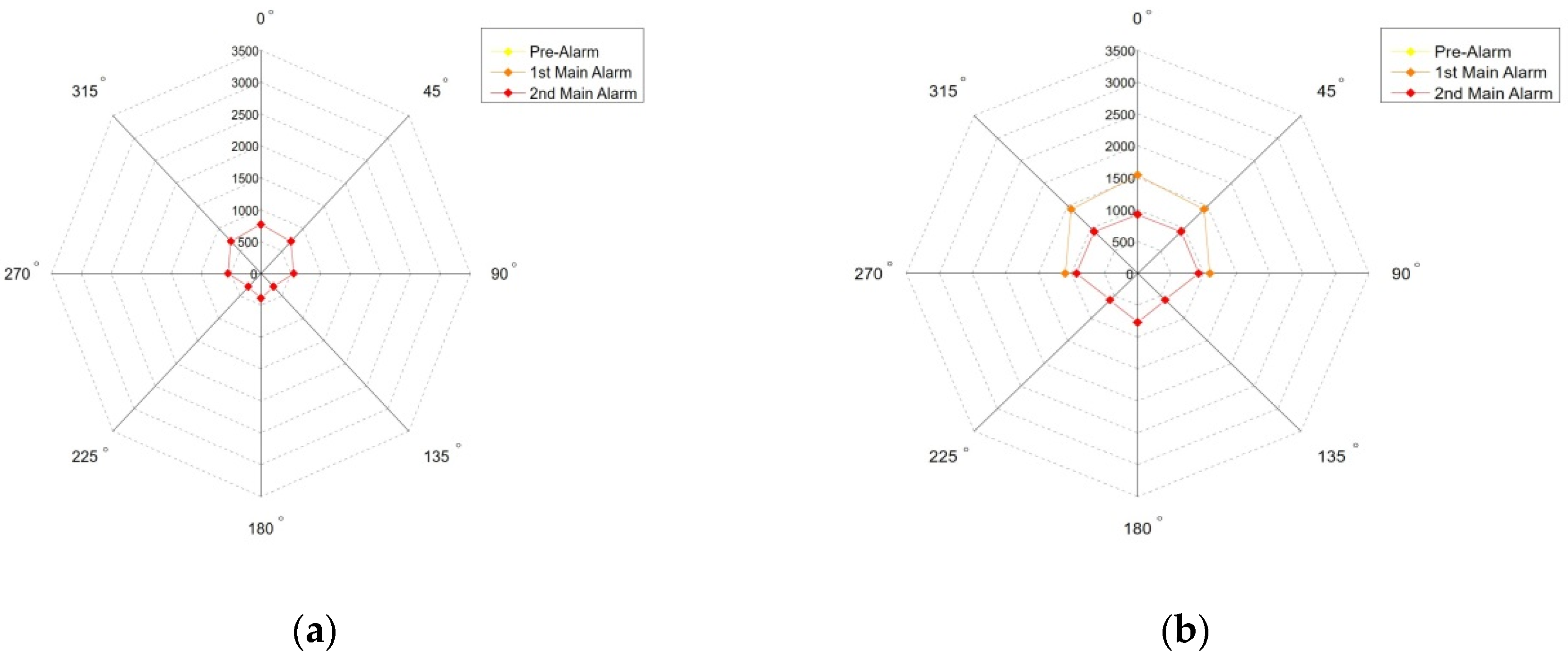
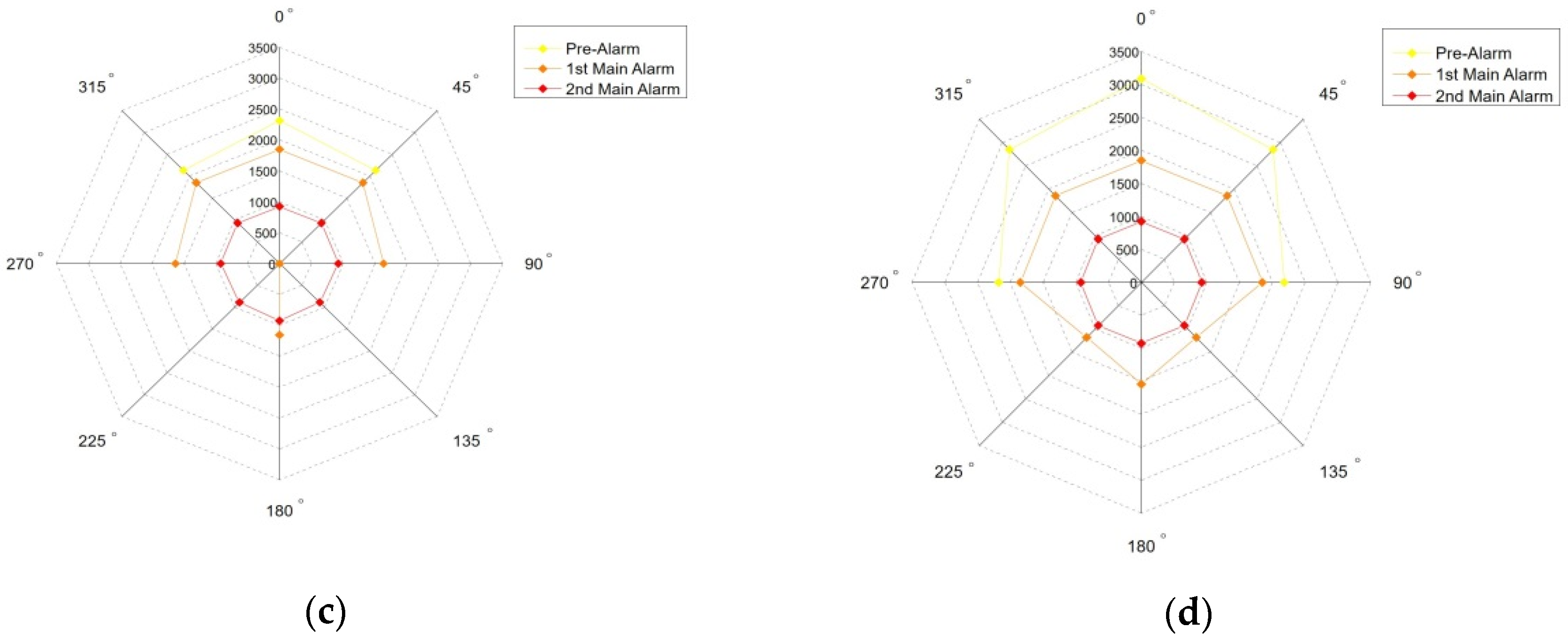
4.1.2. Simulation Results
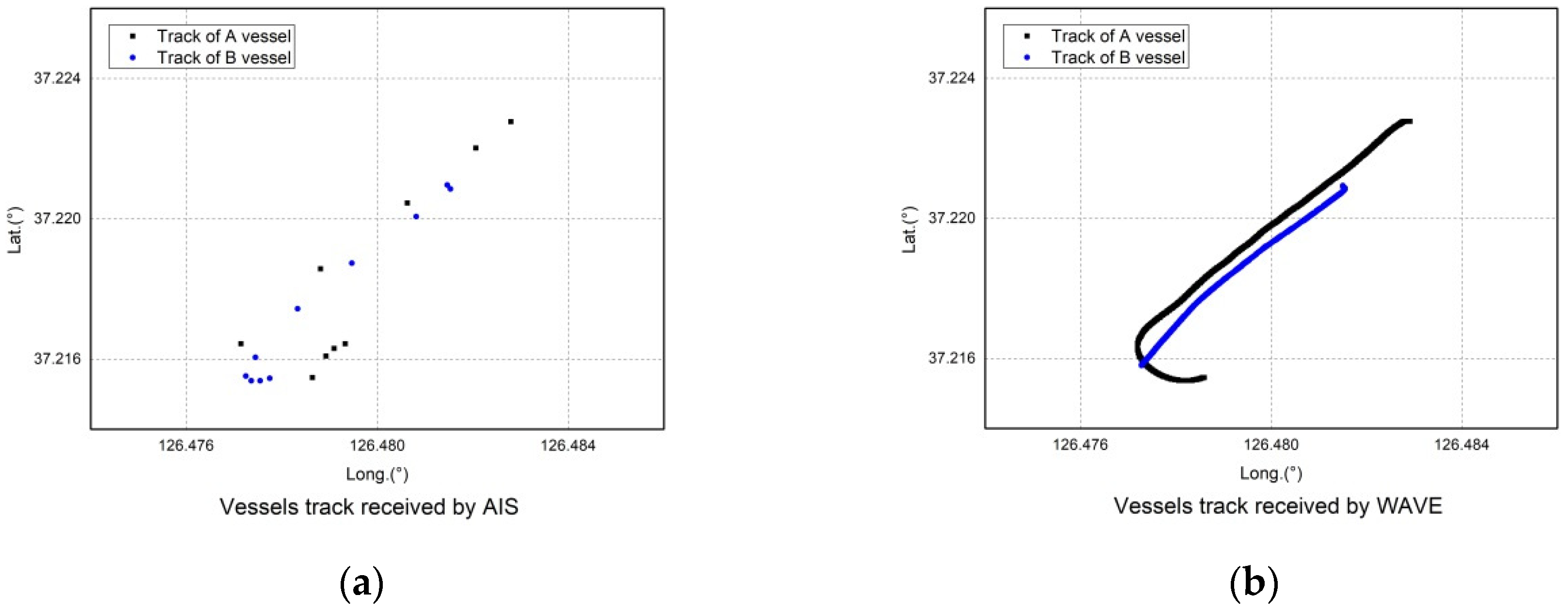
4.2. Verification Through Actual Ship Experiment
4.2.1. Actual Ship Experiment Overview
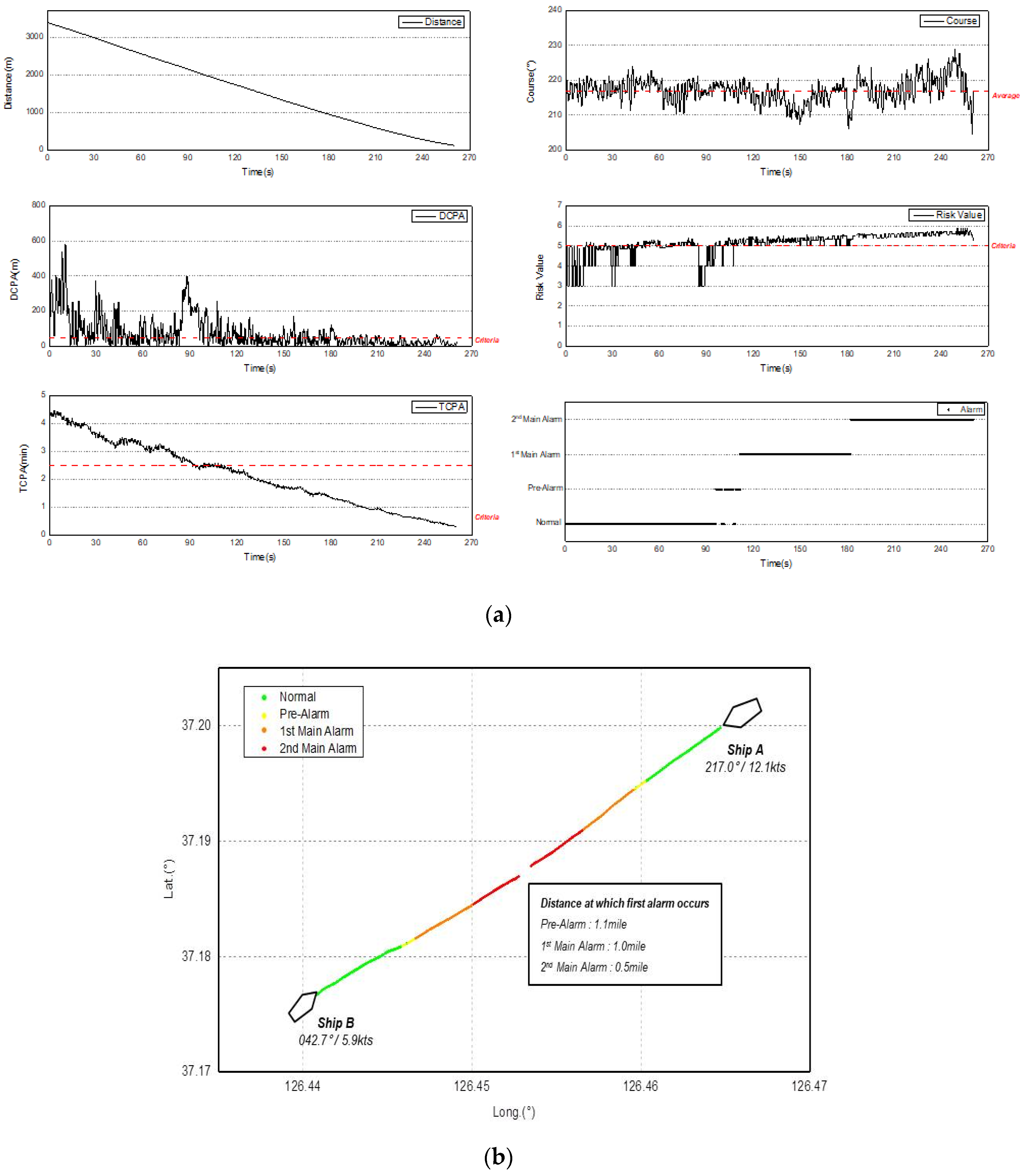
4.2.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- Mata-Álvarez-Santullano, F.; Souto-Iglesias, A. Stability, safety and operability of small fishing vessels. Ocean Eng. 2014, 79, 81–91. [Google Scholar] [CrossRef]
- JTSB. JTSB Annual Report 2018; Japan Transport Safety Board: Tokyo, Japan, 2018; pp. 96–97.
- KMST. 2018 Statistical Report; Korean Maritime Safety Tribunal: Sejong, Korea, 2018; pp. 10–12.
- Morel, G.; Chauvin, C. A socio-technical approach of risk management applied to collisions involving fishing vessels. Saf. Sci. 2006, 44, 599–619. [Google Scholar] [CrossRef]
- Mills, S. Watch-keeping on fishing vessels: Can electronic marine system help? J. Navig. 2011, 64, 521–532. [Google Scholar] [CrossRef]
- Hsu, H.Z.; Witt, N.A.; Hooper, J.B.; McDermott, A.P. The AIS-assisted collision avoidance. J. Navig. 2009, 62, 657–670. [Google Scholar] [CrossRef]
- IMO. Adoption on New Amended Performance Standard. Resolut. MSC 1998, 74, 15–16. [Google Scholar]
- Sohn, K.H. Maneuvering performance of high-speed craft under waves. Soc. Nav. Archit. Korea 1995, 32, 36–39. [Google Scholar]
- Lee, J.S. A basic study on the collision risk of VTS considering the operational characteristics of small vessels. In Proceedings of the Korean Institute of Navigation and Port Research Conference, GyoungJu, Korea, 8–9 November 2018; pp. 273–274. [Google Scholar]
- Lee, E.B. A basic study on the development of ultrasonic alert system for preventing collision accident of small ships. J. Res. Inst. Marit. Ind. 2004, 15, 1–7. [Google Scholar]
- Lee, S.J.; Kim, H.S.; Long, Z.J.; Lee, S.K. A study on the Korea marine accidents and the countermeasures. J. Navig. Port Res. 2011, 35, 205–211. [Google Scholar] [CrossRef]
- Seo, A.; Hida, T.; Nishiyama, M.; Nagao, K. Comparison and evaluation on user interface of small ship navigation support system. In Proceedings of the Japan Institute of Navigation 2018, Tokyo, Japan, 8–9 June 2018; pp. 1–4. [Google Scholar]
- Ozturk, U.; Cicek, K. Individual collision risk assessment in ship navigation: A systematic literature review. Ocean Eng. 2019, 180, 130–143. [Google Scholar] [CrossRef]
- Macduff, T. The probability of vessel collisions. Ocean Ind. 1974, 9, 144–148. [Google Scholar]
- Fujii, Y.; Yamanouchi, H.; Mizuki, N. II—The probability of stranding. J. Navig. 1974, 27, 239–243. [Google Scholar] [CrossRef]
- Mou, J.M.; Van Der Tak, C.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. An analysis of domain-based ship collision risk parameters. Ocean Eng. 2016, 126, 47–56. [Google Scholar] [CrossRef]
- Zhen, R.; Riveiro, M.; Jin, Y. A novel analytic framework of real-time multi-vessel collision risk assessment for maritime traffic surveillance. Ocean Eng. 2017, 145, 492–501. [Google Scholar] [CrossRef]
- Wang, X.; Kong, L.; Kong, F.; Qiu, F.; Xia, M.; Arnon, S.; Chen, G. Millimeter wave communication: A comprehensive survey. IEEE Commun. Surv. Tutor. 2018, 20, 1616–1653. [Google Scholar] [CrossRef]
- Korea Communications Agency. V2X Communications, Emerged as a Key Technology in Intelligent Transport System. Trends Prospect. (Trend Focus) 2014, 73, 42–44. [Google Scholar]
- Fan, B.; Tian, H.; Zhu, S.; Chen, Y.; Zhu, X. Traffic-aware relay vehicle selection in millimeter-wave vehicle-to-vehicle communication. IEEE Wirel. Commun. Le. 2018, 8, 400–403. [Google Scholar] [CrossRef]
- Seii, S.A.I. U.S. Patent No. 10,296,011; Patent and Trademark Office: Washington, DC, USA, 2019. [Google Scholar]
- Zhang, C.; Wang, G.; Jia, M.; He, R.; Zhou, L.; Ai, B. Doppler shift estimation for millimeter-wave communication systems on high-speed railways. IEEE Access 2018, 7, 40454–40462. [Google Scholar] [CrossRef]
- He, D.; Ai, B.; Guan, K.; Zhong, Z.; Hui, B.; Kim, J.; Kim, I. Channel measurement, simulation, and analysis for high-speed railway communications in 5G millimeter-wave band. IEEE Trans. Intell. Transp. Syst. 2017, 19, 3144–3158. [Google Scholar] [CrossRef]
- Kang, W.S.; Joen, S.B.; Kim, Y.D. A study on marine application of wireless access in vehicular environment (WAVE) communication technology. J. Korean Soc. Mar. Envrion. Saf. 2018, 24, 445–450. [Google Scholar] [CrossRef]
- Kang, W.S.; Kim, Y.D.; Lee, M.K.; Park, Y.S. The development of a collision warning system for small-sized vessels using WAVE communication technology. J. Korean Soc. Mar. Envrion. Saf. 2019, 25, 151–158. [Google Scholar] [CrossRef]
- Nguyen, X.T. A Study on the Development of Real Time Supporting System (RTSS) for VTS Officers. Ph.D. Thesis, Korea Maritime and Ocean University, Busan, Korea, 2014. [Google Scholar]
- Park, Y.S.; Lee, Y.S. Development of efficient training material through danger analysis to various encounter types using training ship. J. Navig. Port Res. 2008, 32, 103–108. [Google Scholar] [CrossRef] [Green Version]
- Anglo-Eastern. Guideline for Collision Avoidance; Anglo-Eastern Ship Management: Hongkong, 2010; pp. 1–2. [Google Scholar]
- Yun, Y.J.; Jun, S.H.; Moon, S.B. Terrestrial Navigation; Maritime Book Publishing Department of Korea Maritime and Ocean University: Busan, Korea, 2013. [Google Scholar]
- Inoue, K. Theory and Practice of Ship Handling; MunHyun: Busan, Korea, 2017; pp. 56–70. [Google Scholar]
- Lee, M.K.; Park, Y.S.; Kang, W.S. A study on construction of collision prevention algorithm for small vessel using WAVE communication system. J. Korean Soc. Mar. Environ. Saf. 2019, 25, 1–8. [Google Scholar] [CrossRef]
- IMO. A study on Ship Operator Centered Collision Prevention and Alarm System. Sub-Committee on Navigation 2015, NCRS 2/INF.10; International Maritime Organization: London, UK, 2015. [Google Scholar]
- Aleandri, C. Satellite AIS tracking integrated with a ship collision prevention and alert system. In Proceedings of the CIRM Annual General Meeting 2015, Gibraltar, 3–5 June 2015. [Google Scholar]
- Park, Y.; Park, J.; Shin, D.; Lee, M.; Park, S. Application of potential assessment of risk (PARK) model in Korea waterways. J. Int. Marit. Saf. Environ. Aff. Shipp. 2017, 1, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Weather Information of Korea Meteorological Administration. Available online: http://www.weather.go.kr/mini/marine/marine_integrate.jsp (accessed on 15 March 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | mmWAVE Communication | AIS |
|---|---|---|
| Frequency | 5.8 GHz band (5.855 to 5.925 GHz) | 161.975 MHz, 162.025 MHz |
| Communication connection method | OFDM, CSMA-CA Unicast, Broadcast | Autonomous Time Division Multiplexing SOTDMA, CSTDMA by Class |
| Output | 100 mW or less | 2 to 12.5 W |
| Transmission period | 100 ms | 2 s to 3 min |
| Transmission data | S2S Protocol Reference | 22 messages |
| Transmission formats | BPSK, QPSK, 16QAM, 64QAM | 8 bit |
| Transmission distance | Up to ~5 nautical miles | 50 nautical miles |
| No. | LOA (m) | Beam (m) | Advance (m) | Transfer (m) | Tactical Diameter (m) |
|---|---|---|---|---|---|
| 1 | 17.0 | 5.0 | 111.1 | 59.3 | 131.5 |
| 2 | 16.0 | 4.9 | 85.2 | 40.7 | 90.7 |
| 3 | 11.6 | 3.6 | 63.0 | 27.8 | 66.7 |
| 4 | 14.6 | 4.3 | 101.9 | 48.2 | 113.0 |
| 5 | 14.3 | 4.2 | 77.8 | 37.0 | 81.5 |
| 6 | 14.9 | 4.2 | 81.5 | 50.0 | 113.0 |
| 7 | 13.9 | 3.8 | 92.6 | 20.4 | 87.0 |
| 8 | 12.2 | 3.5 | 98.2 | 61.1 | 146.3 |
| 9 | 10.1 | 3.0 | 79.6 | 27.8 | 75.9 |
| 10 | 5.6 | 2.0 | 61.1 | 29.6 | 53.7 |
| 11 | 9.9 | 2.6 | 88.9 | 40.7 | 94.5 |
 | Scenario No. | Speed (knots) | Course |
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 | |||
| 5, 10, 15, 20 |
| Scenario No. | Situation | Actual Encounter Angle | Course (°) | Speed (knots) | ||
|---|---|---|---|---|---|---|
| Ship A | Ship B | Ship A | Ship B | |||
| Head-on(000°) | 006° | 217.0 | 42.7 | 12.1 | 5.9 | |
| Crossing(045°) | 034° | 239.3 | 25.5 | 12.0 | 10.7 | |
| Crossing(090°) | 051° | 251.1 | 20.0 | 12.0 | 9.8 | |
| Crossing(135°) | 151° | 276.0 | 304.7 | 11.5 | 10.5 | |
| * | Overtaking(180°) + Quick-turnover | 176° | 216.4 | 212.1 | 13.8 | 8.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, M.-K.; Park, Y.-S. Collision Prevention Algorithm for Fishing Vessels Using mmWAVE Communication. J. Mar. Sci. Eng. 2020, 8, 115. https://doi.org/10.3390/jmse8020115
Lee M-K, Park Y-S. Collision Prevention Algorithm for Fishing Vessels Using mmWAVE Communication. Journal of Marine Science and Engineering. 2020; 8(2):115. https://doi.org/10.3390/jmse8020115
Chicago/Turabian StyleLee, Myoung-Ki, and Young-Soo Park. 2020. "Collision Prevention Algorithm for Fishing Vessels Using mmWAVE Communication" Journal of Marine Science and Engineering 8, no. 2: 115. https://doi.org/10.3390/jmse8020115
APA StyleLee, M. -K., & Park, Y. -S. (2020). Collision Prevention Algorithm for Fishing Vessels Using mmWAVE Communication. Journal of Marine Science and Engineering, 8(2), 115. https://doi.org/10.3390/jmse8020115