Numerical Investigation into Freak Wave Effects on Deepwater Pipeline Installation


Abstract
:1. Introduction
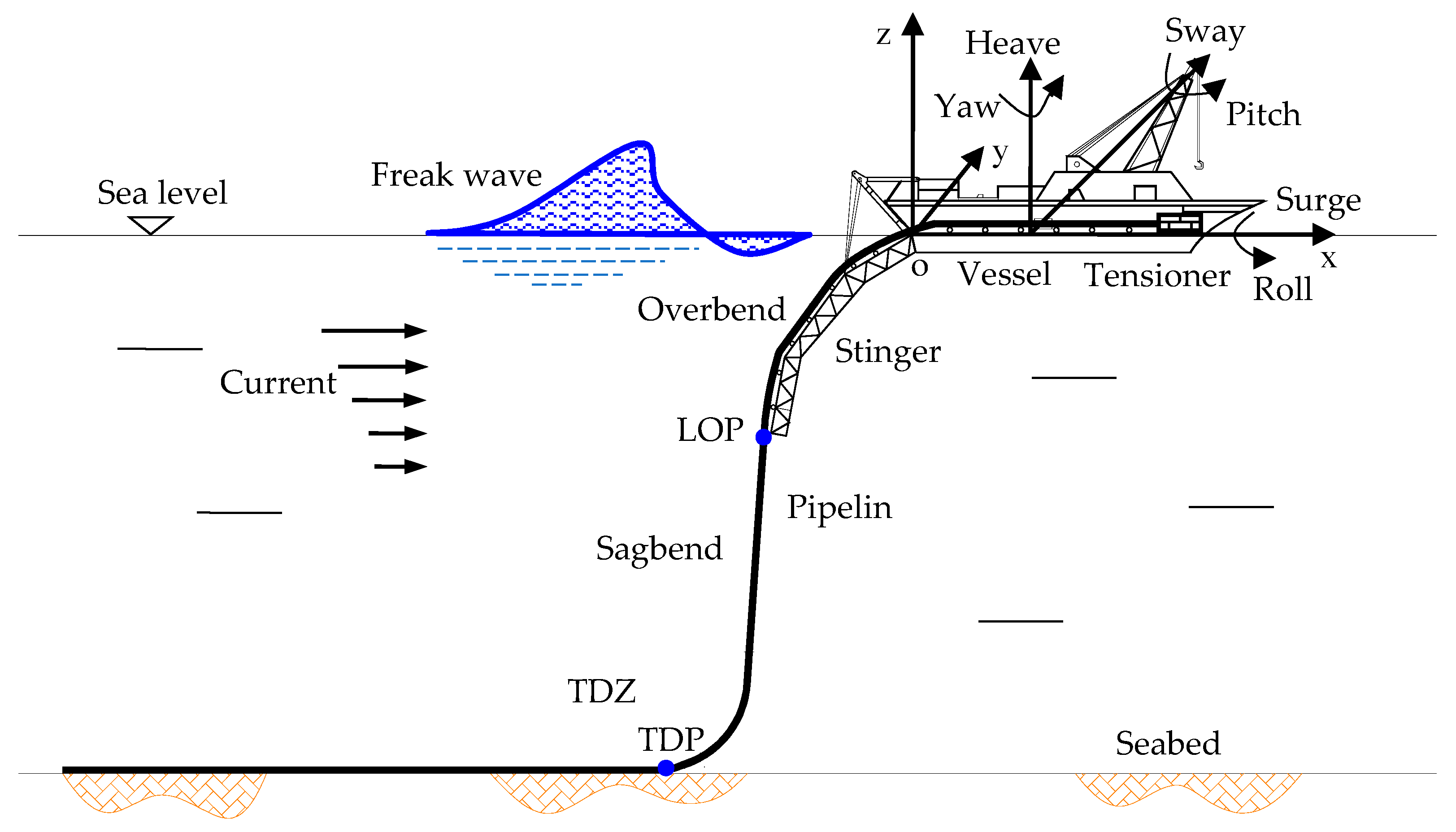
2. Deepwater Pipeline Installation Simulation
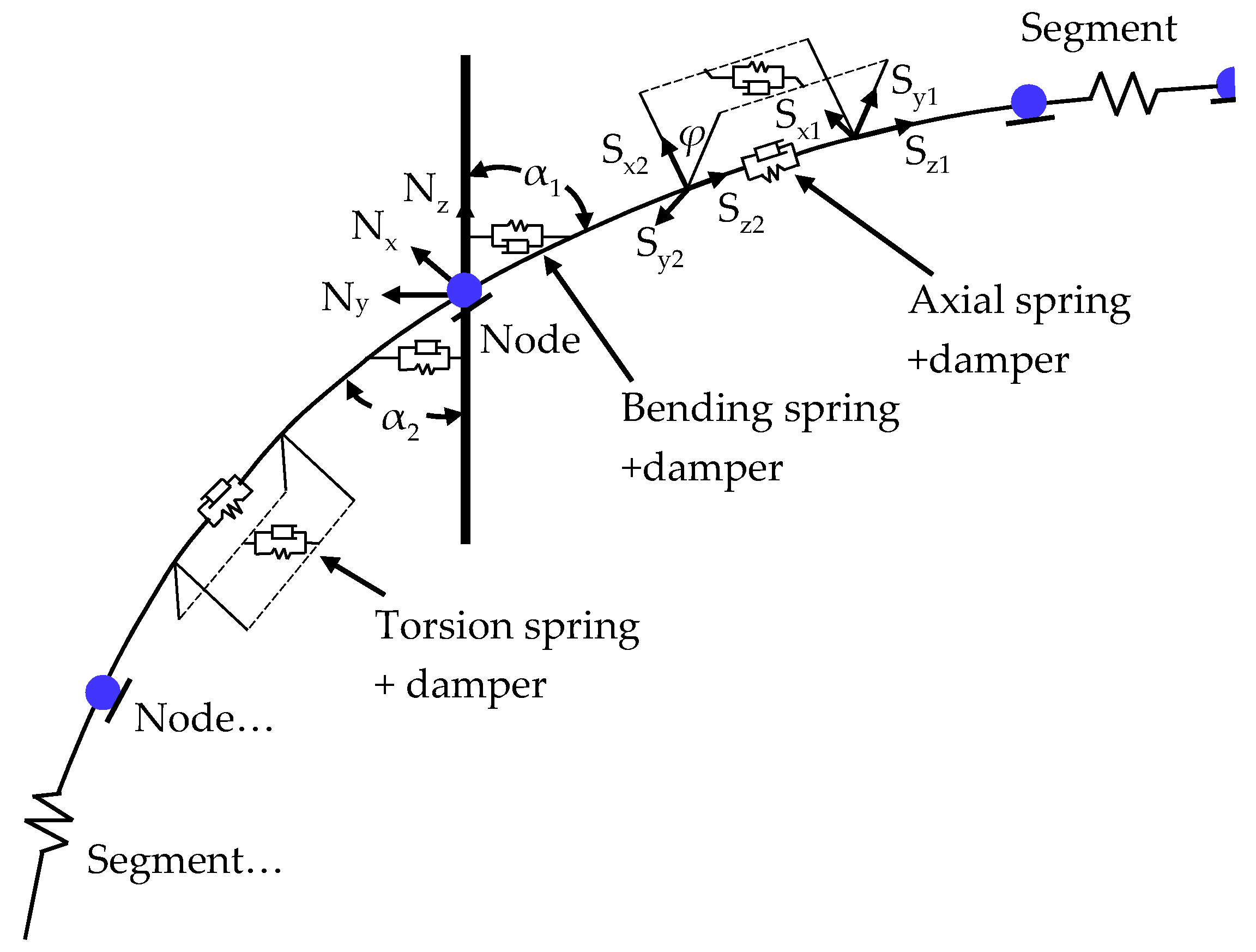
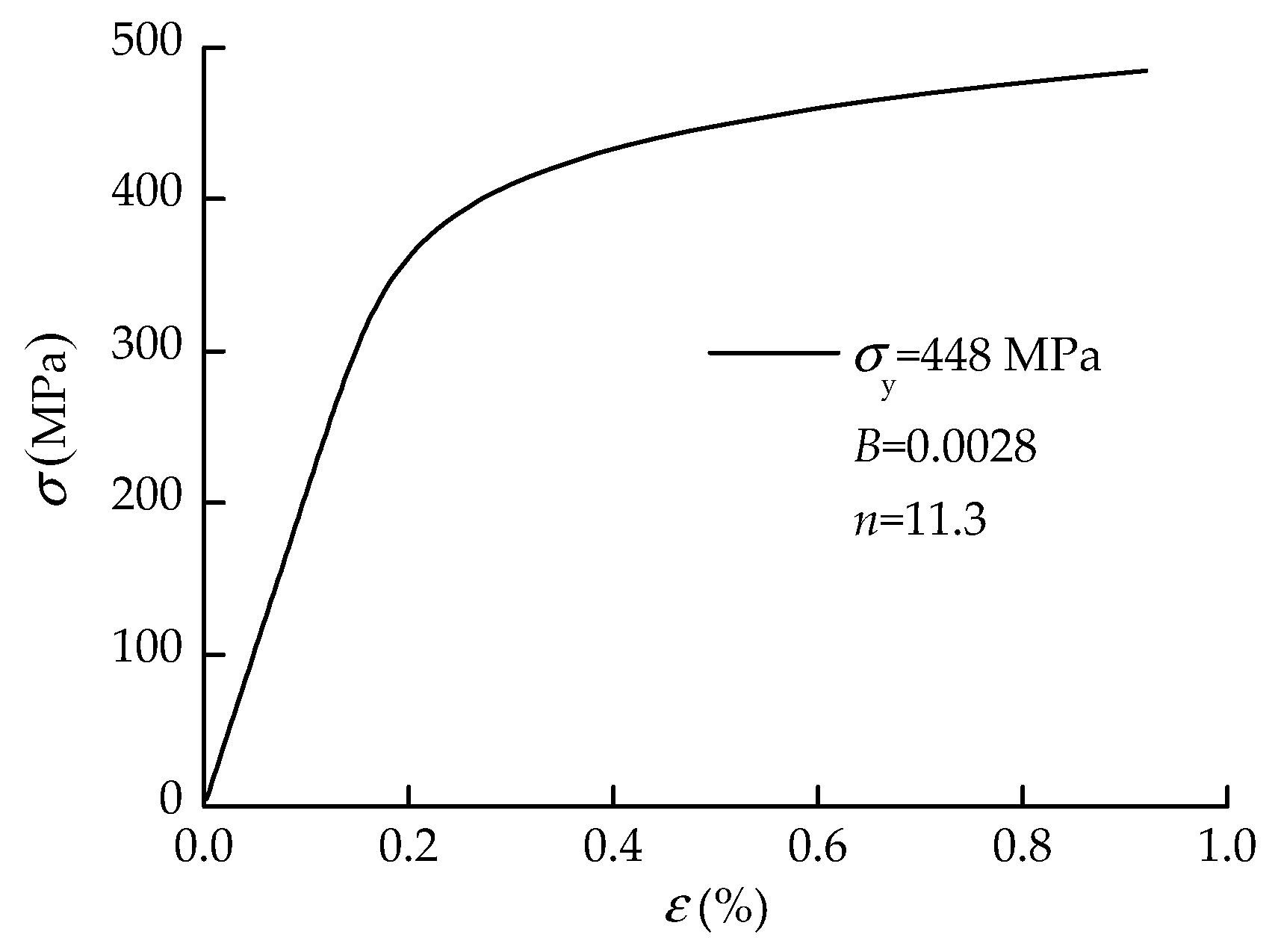
2.1. Pipeline Model
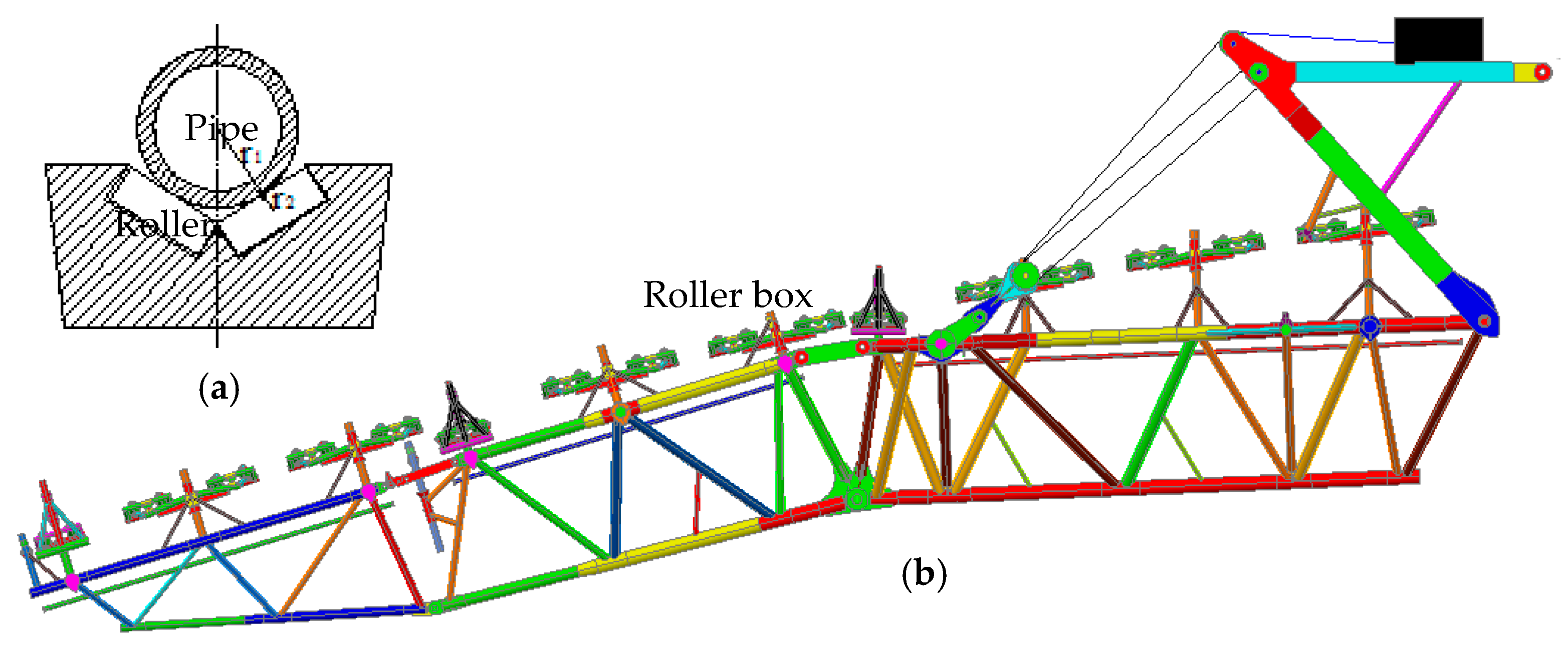
2.2. Pipe–Stinger Roller Interaction
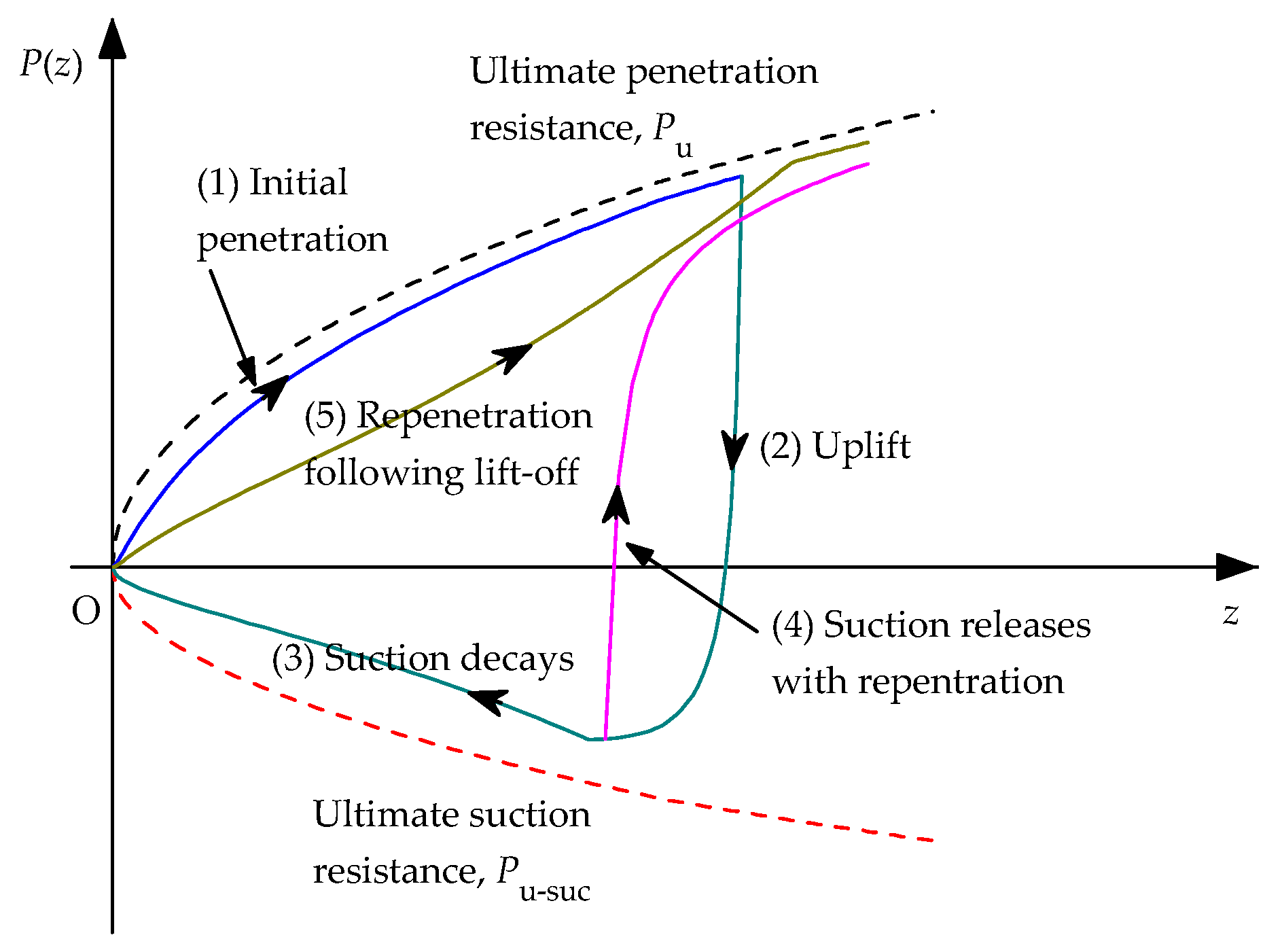
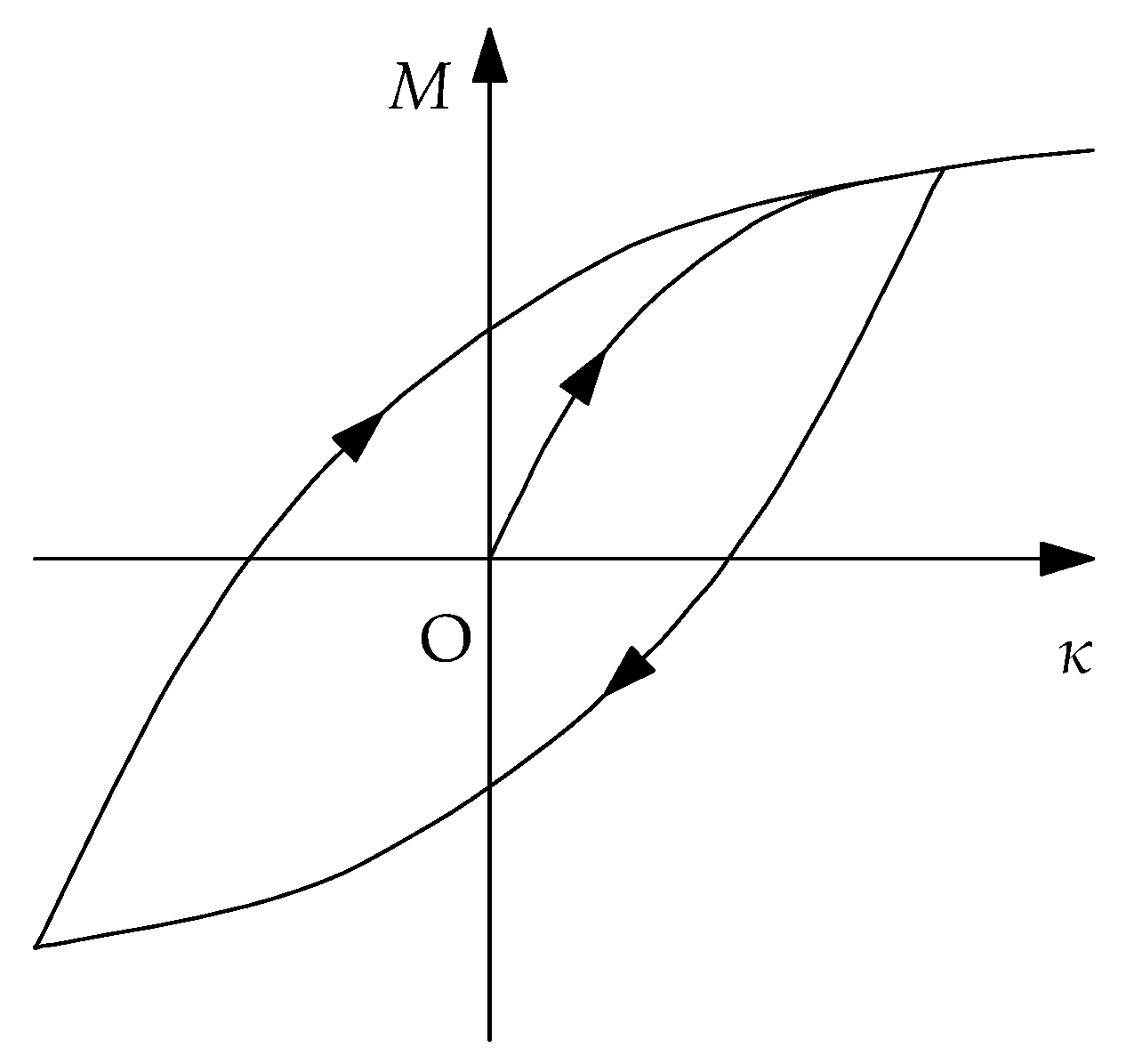
2.3. Pipe–Seabed Soil Interaction
2.4. Pipelay Vessel Motions
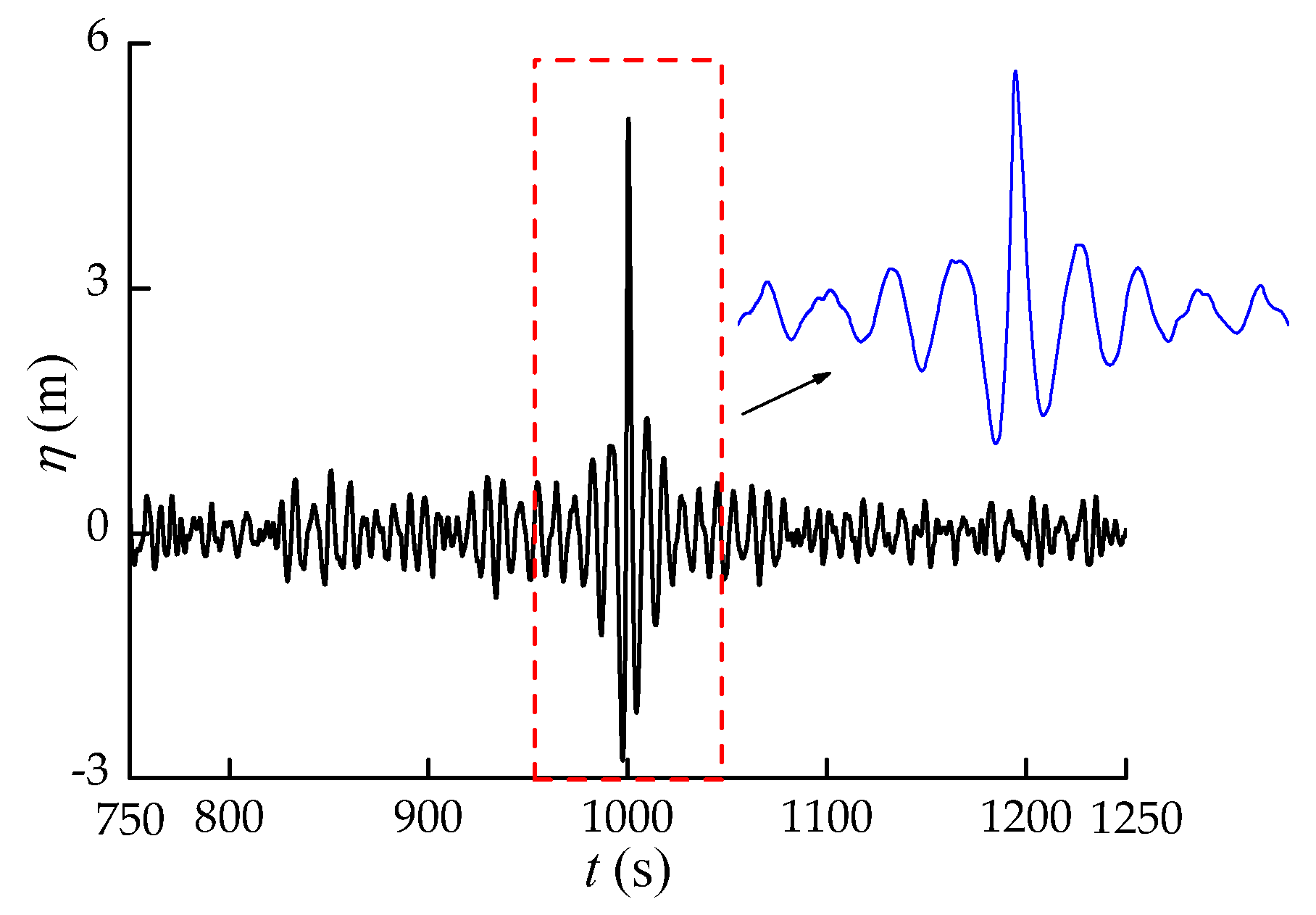
3. Freak Wave Generation
3.1. Linear Superposition Approach
3.2. Case Study
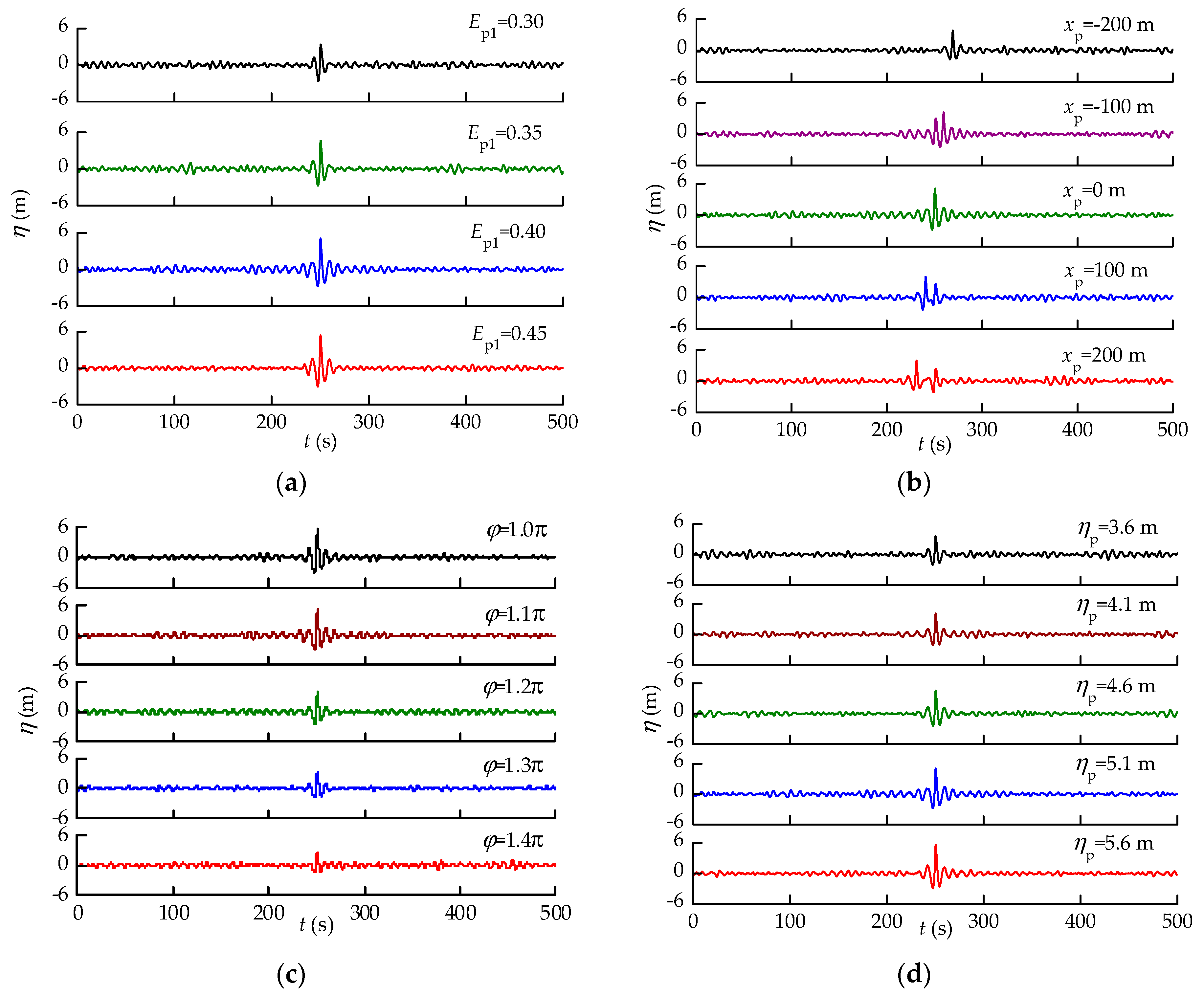
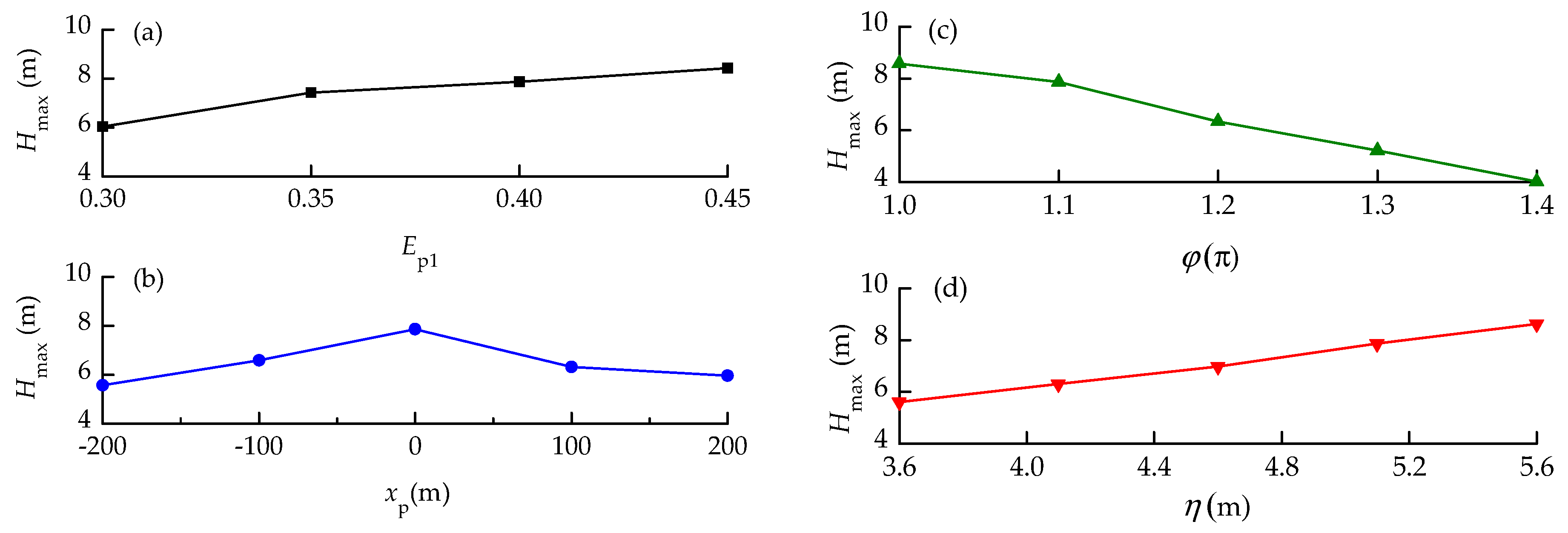
3.3. Sensitive Analysis
4. Numerical Implementation of Pipeline Installation under Freak Waves
4.1. Pipelay Parameters
4.2. Calcultion Method
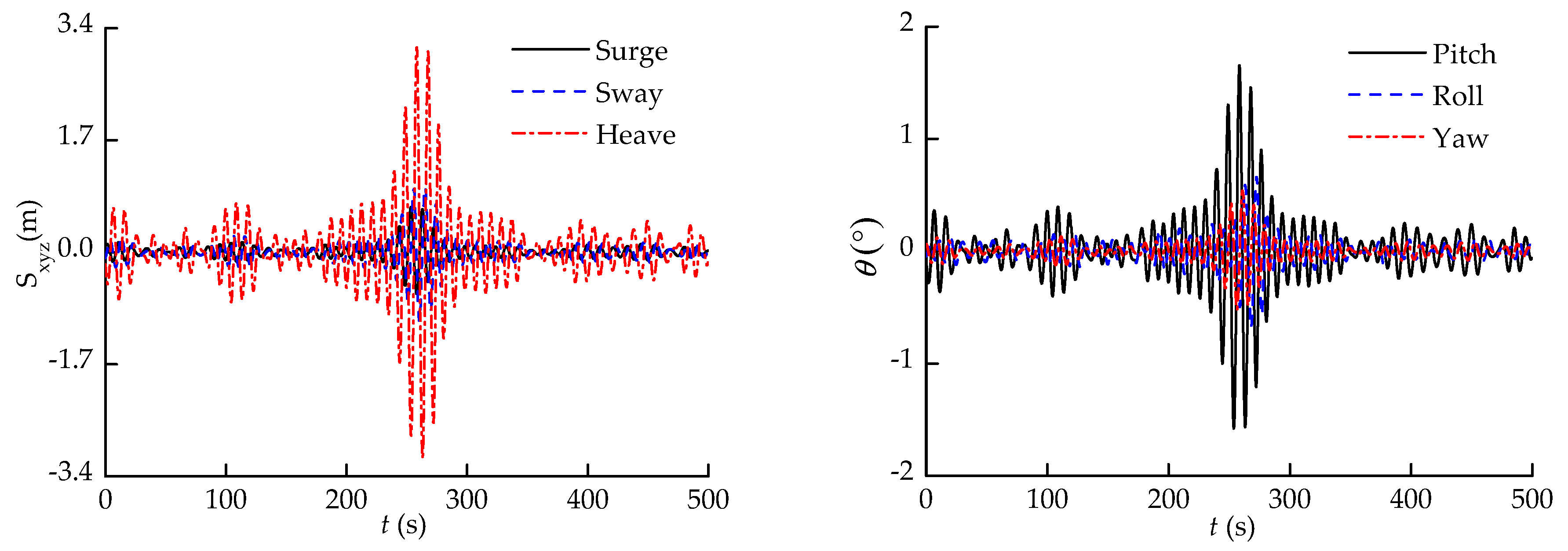
4.3. Time History Response of Pipelay Vessel Motions
5. Results Analysis
5.1. Effect of the Wave Energy Ratio Coefficient
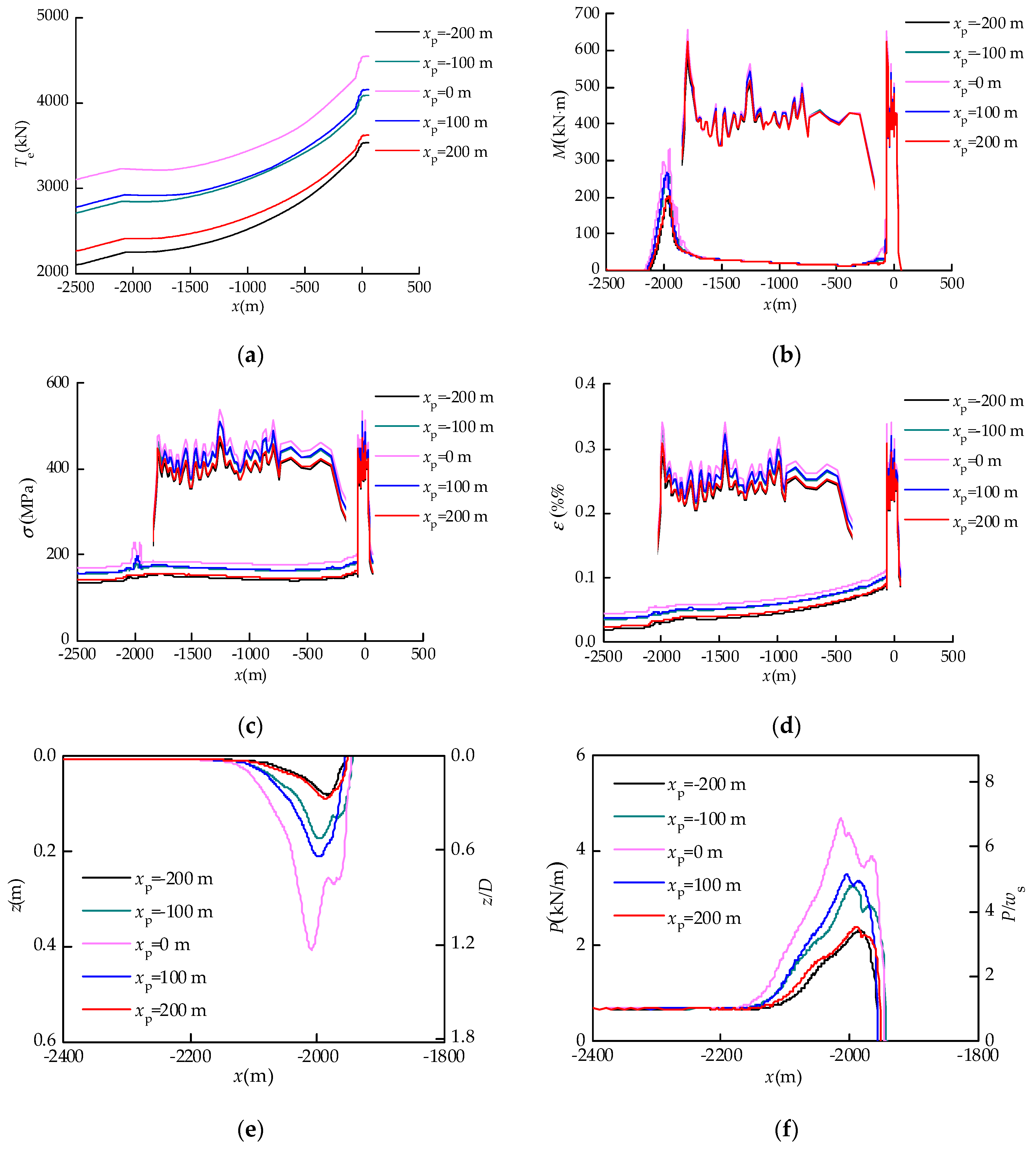
5.2. Effect of the Wave Focusing Location
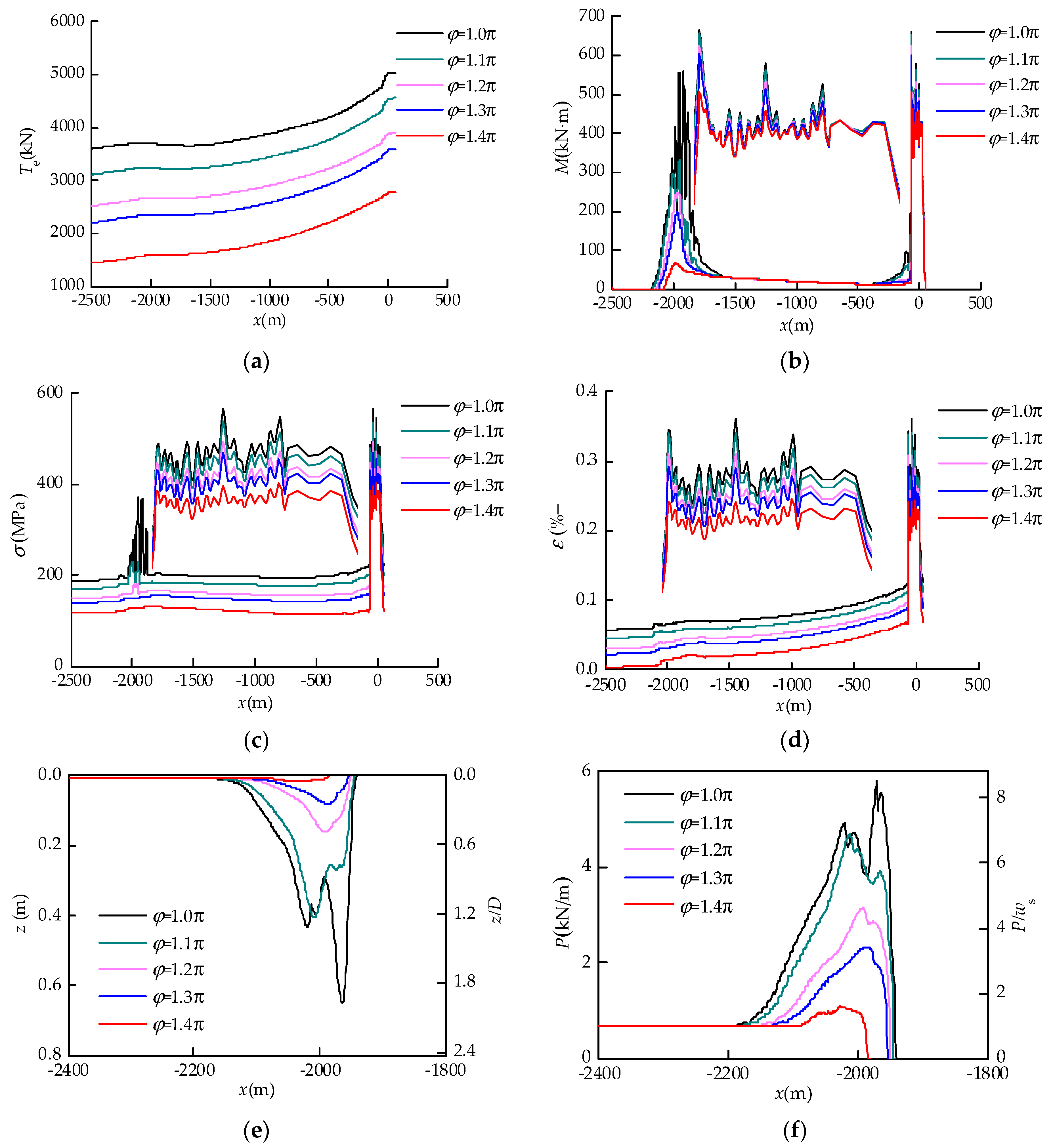
5.3. Effect of the Wave Phase Range
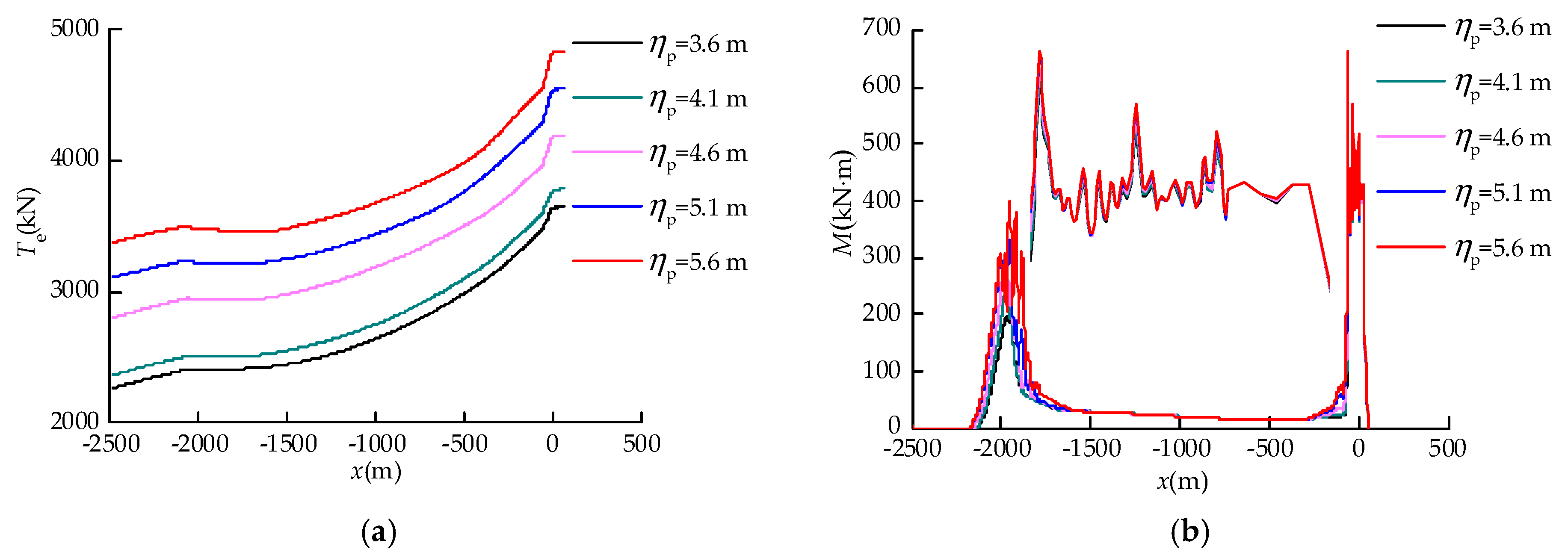
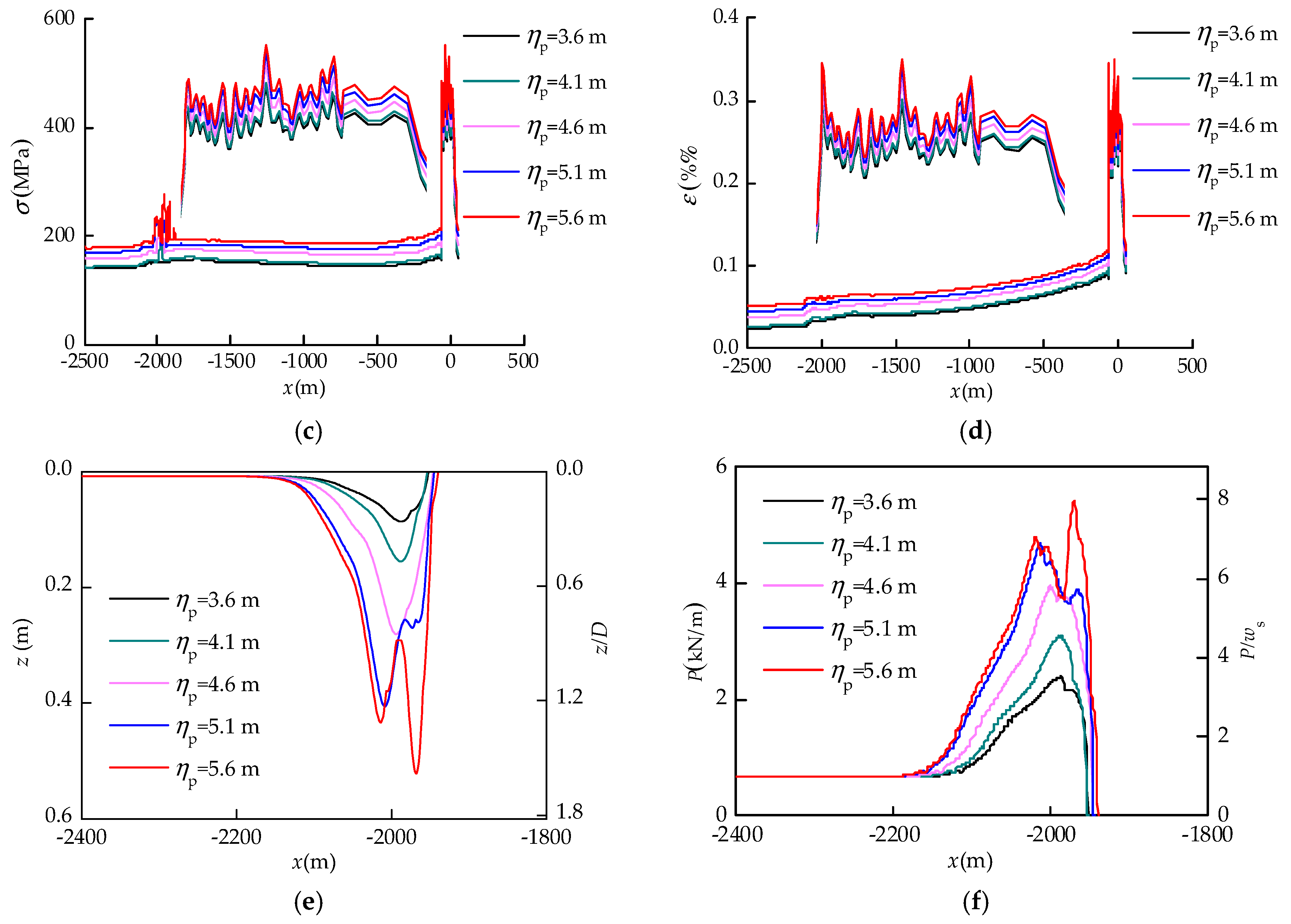
5.4. Effect of Wave Peak Value
6. Discussion and Implications
7. Conclusions
- (1)
- The reasonable selection of wave parameters can effectively generate a variety of freak wave trains by the linear superposition model. The maximum heights of freak wave trains are obviously different with variations in the energy ratio coefficient, focusing position, phase range, and peak value. The freak wave trains could be steadily incorporated into the developed S-lay FEM to implement the dynamic analysis of deepwater pipeline installation.
- (2)
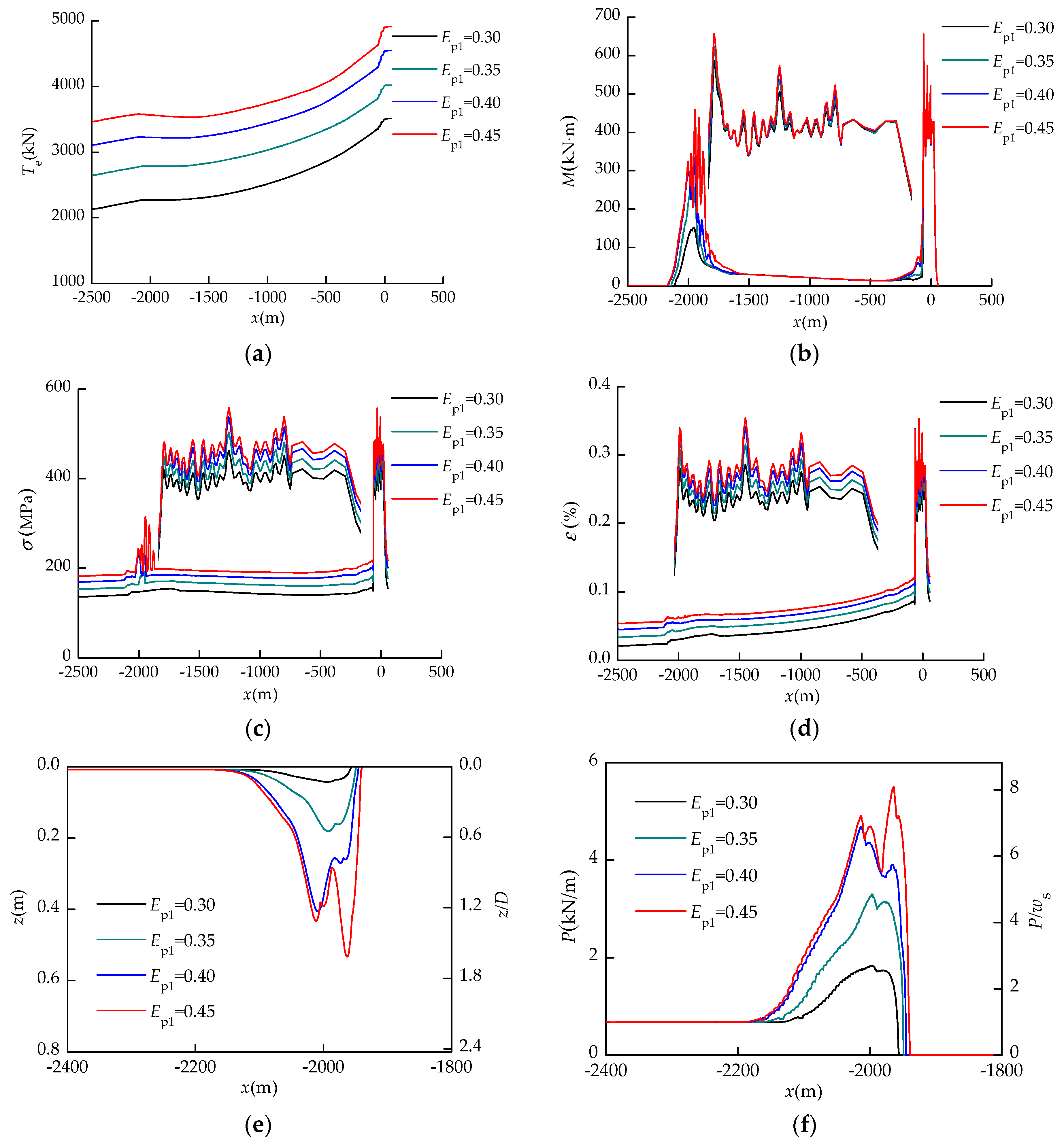
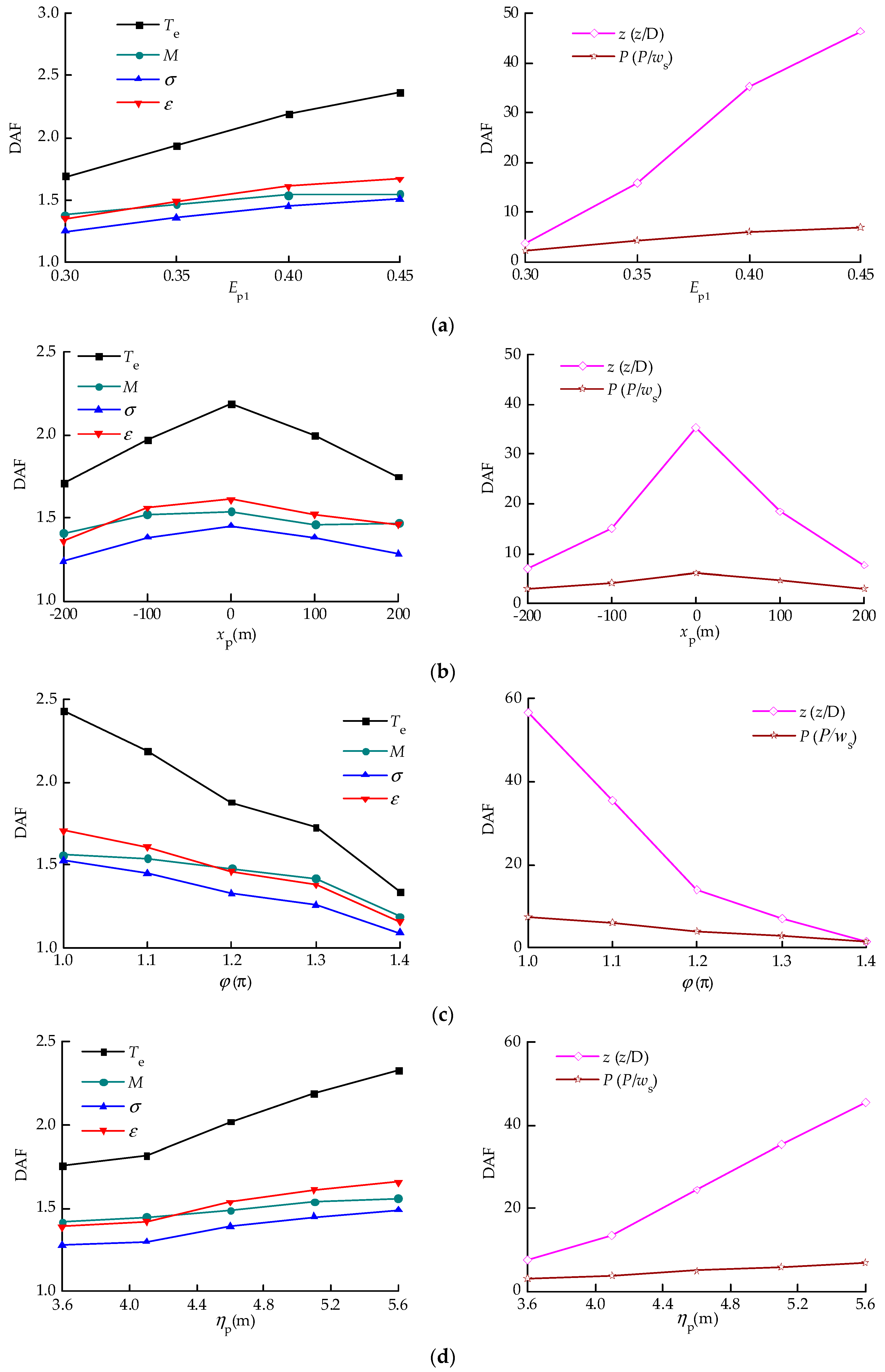
- The energy ratio coefficient has a great influence on the generation of freak waves and the induced pipeline dynamic responses. With an increase in the energy ratio coefficient for transient waves, all the pipeline behaviors and seabed resistance remarkably increase. Especially, when the Ep1 reaches 0.45, the interaction responses of the touchdown pipeline and seabed soil are drastically noticeable, which causes tremendous variation in the bending moment, von Mises stress, and pipeline embedment in the TDZ.
- (3)
- The dynamic behaviors of the laying pipeline and seabed resistance are also strongly influenced by the wave focusing location. When the focusing wave is located at the center position xp = 0 m, the responses of the offshore pipeline and seabed resistance are the most significant. Besides, the axial tension, pipeline embedment, and seabed resistance for the forward wave focusing location are slightly larger than the corresponding results for the negative wave focusing location.
- (4)
- The phase range and peak value of freak waves were proven to be important influencing factors in the pipeline and seabed responses. As the wave phase range increases, the axial tension, bending moment, von-Mises stress, longitudinal strain, pipeline embedment, and seabed resistance as well as their DAFs remarkably decrease. On the contrary, when the wave peak value becomes larger, the pipeline behaviors and seabed resistance obviously augment.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Ai | internal cross-section area |
| Ao | external cross-section area |
| B | coefficient of the Ramberg–Osgood model |
| Ca | added mass coefficient |
| CD | drag coefficient |
| d | shortest separation distance of the center lines between the pipe and roller |
| D | pipe outer diameter |
| E | elastic modulus |
| Ep1 | energy ratio coefficient of a transient wave |
| Ep2 | energy ratio coefficient of a random wave |
| EAnom | nominal axial stiffness |
| fm | peak frequency |
| g | gravitational constant |
| k1 | pipe contact stiffness |
| k2 | roller contact stiffness |
| ki | wave number of the ith wave component |
| Kmax | soil normalized maximum stiffness |
| ks | soil shear stiffness |
| L | instantaneous length of a line segment |
| L0 | unstretched length of a line segment |
| Mb | bending moment |
| n | power exponent of the Ramberg–Osgood model |
| N | number of wave components |
| Nc | soil nominal bearing capacity factor |
| Pi | internal pressure |
| Po | external pressure |
| Pu(z) | soil ultimate penetration resistance |
| r1 | pipe radius |
| r2 | roller radius |
| S(f) | spectral density function |
| Su0 | soil mudline shear strength |
| Sug | soil shear strength gradient |
| tc | corrosion coating thickness |
| tp | wave focusing time |
| t’p | pipe wall thickness |
| Te | effective tension |
| Tw | wall tension |
| Tor | torque moment |
| wa | pipe weight per unit length in air |
| ws | pipe submerged weight per unit length |
| xp | wave focusing position |
| α | spectral energy coefficient |
| γ | peak enhancement factor |
| κ2 | curvature |
| μ | soil friction coefficient |
| ν | Poisson’s ratio |
| ρc | pipe corrosion coating density |
| ρp | pipe density |
| ρsoil | saturated soil density |
| ρw | sea water density |
| angular frequency of the ith wave component | |
| phase lag of the ith wave component | |
| effective yield stress | |
| φ | twist angle |
| τ | spectral width parameter |
| ξ | axial damping coefficient |
| ς | bending damping coefficient |
| ζ | torsional damping coefficient |
References
- Kjeldsen, S.P. Measurements of freak waves in Norway and related ship accidents. In Proceedings of the Royal Institution of Naval Architects International Conference-Design and Operation for Abnormal Conditions III, London, UK, 29–30 April 2004. [Google Scholar]
- Slunyaev, A.; Didenkulova, I.; Pelinovsky, E. Rogue waves in 2006–2010. Nat. Hazards Earth Syst. Sci. 2011, 11, 2913–2924. [Google Scholar]
- Bruschi, R.; Vitali, L.; Marchionni, L.; Parrella, A.; Mancini, A. Pipe technology and installation equipment for frontier deep water projects. Ocean Eng. 2015, 108, 369–392. [Google Scholar] [CrossRef]
- Davis, M.C.; Zarnick, E.E. Testing ship models in transient waves. In Proceedings of the 5th International Symposium on Naval Hydrodynamics, Bergen, Norway, 10–12 September 1964; David Taylor Model Basin Hydromechanics Lab: Washington, DC, USA, 1964. [Google Scholar]
- Baldock, T.E.; Swan, C.; Taylor, P.H. A laboratory study of nonlinear surface wave in water. Philos. Trans. Math. Phys. Eng. Sci. 1996, 354, 649–676. [Google Scholar]
- Fochesato, C.; Grilli, S.; Dias, F. Numerical modeling of extreme rogue waves generated by directional energy focusing. Wave Motion 2007, 44, 395–416. [Google Scholar] [CrossRef]
- Zhao, X.Z.; Sun, Z.C.; Liang, S.X. Efficient focusing models for generation of freak waves. China Ocean Eng. 2009, 23, 429–440. [Google Scholar]
- Zhao, X.Z.; Ye, Z.T.; Fu, Y.N.; Cao, F.F. A CIP-based numerical simulation of freak wave impact on a floating body. Ocean Eng. 2014, 87, 50–63. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Zhang, N.C.; Yu, Y.X. An efficient focusing model for generation of freak waves. Acta Oceanol. Sin. 2011, 30, 19–26. [Google Scholar] [CrossRef]
- Hu, Z.Q.; Tang, W.Y.; Xue, H.X. A probability-based superposition model of freak wave simulation. Appl. Ocean Res. 2014, 47, 284–290. [Google Scholar] [CrossRef]
- Tang, Y.G.; Li, Y.; Wang, B.; Liu, S.X.; Zhu, L.H. Dynamic analysis of turret-moored FPSO system in freak wave. China Ocean Eng. 2016, 30, 521–534. [Google Scholar] [CrossRef]
- Pan, W.B.; Zhang, N.C.; Huang, G.X.; Ma, X.Y. Experimental study on motion responses of a moored rectangular cylinder under freak waves (I: Time-domain study). Ocean Eng. 2018, 153, 268–281. [Google Scholar] [CrossRef]
- Gong, S.F.; Chen, K.; Chen, Y.; Jin, W.L.; Li, Z.G.; Zhao, D.Y. Configuration analysis of deepwater S-lay pipeline. China Ocean Eng. 2011, 25, 519–530. [Google Scholar] [CrossRef]
- Marchionni, L.; Alessandro, L.; Vitali, L. Offshore pipeline installation: 3-dimensional finite element modelling. In Proceedings of the 30th International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- O’Grady, R.; Harte, A. Localised assessment of pipeline integrity during ultra-deep S-lay installation. Ocean Eng. 2013, 68, 27–37. [Google Scholar] [CrossRef]
- Gong, S.F.; Xu, P.; Bao, S.; Zhong, W.J.; He, N.; Yan, H. Numerical modelling on dynamic behaviour of deepwater S-lay pipeline. Ocean Eng. 2014, 88, 393–408. [Google Scholar] [CrossRef]
- Gong, S.F.; Xu, P. The influence of sea state on dynamic behaviour of offshore pipelines for deepwater S-lay. Ocean Eng. 2016, 111, 398–413. [Google Scholar] [CrossRef]
- Ivić, S.; Čanađija, M.; Družeta, S. Static structural analysis of S-lay pipe laying with a tensioner model based on the frictional contact. Eng. Rev. 2014, 34, 223–234. [Google Scholar]
- Ivić, S.; Družeta, S.; Hreljac, I. S-Lay pipe laying optimization using specialized PSO method. Struct. Multidiscip. Optim. 2017, 56, 297–313. [Google Scholar] [CrossRef]
- Xie, P.; Zhao, Y.; Yue, Q.J.; Palmer, A.C. Dynamic loading history and collapse analysis of the pipe during deepwater S-lay operation. Mar. Struct. 2015, 40, 183–192. [Google Scholar] [CrossRef]
- Cabrera-Miranda, J.M.; Paik, J.K. On the probabilistic distribution of loads on a marine riser. Ocean Eng. 2017, 134, 105–118. [Google Scholar] [CrossRef]
- Wang, F.C.; Chen, J.; Gao, S.; Tang, K.; Meng, X.W. Development and sea trial of real-time offshore pipeline installation monitoring system. Ocean Eng. 2017, 146, 468–476. [Google Scholar] [CrossRef]
- Liang, H.; Yue, Q.J.; Lim, G.; Palmer, A.C. Study on the contact behaviour of pipe and rollers in deep S-lay. Appl. Ocean Res. 2018, 72, 1–11. [Google Scholar] [CrossRef]
- Liang, H.; Zhao, Y.; Yue, Q.J. Experimental study on dynamic interaction between pipe and rollers in deep S-lay. Ocean Eng. 2019, 175, 188–196. [Google Scholar] [CrossRef]
- Kim, H.S.; Kim, B.W. An efficient linearised dynamic analysis method for structural safety design of J-lay and S-lay pipeline installation. Ships Offshore Struct. 2019, 14, 204–219. [Google Scholar] [CrossRef]
- Orcina. OrcaFlex User Manual, Version 9.7a; Orcina: Cumbria, UK, 2014. [Google Scholar]
- Ramberg, W.; Osgood, W.R. Description of Stress-Strain Curves by Three Parameters; Technical Note, No. 902; National Advisory Committee for Aeronautics (NACA): Washington, DC, USA, 1943. [Google Scholar]
- Wang, F.C.; Luo, Y.; Xie, Y.; Li, B.; Li, J.N. Practical and theoretical assessments of subsea installation capacity for HYSY 201 laybarge according to recent project performances in South China Sea. In Proceedings of the Annual Offshore Technology Conference, Houston, TX, USA, 5–8 May 2014; pp. 2696–2704. [Google Scholar]
- Randolph, M.F.; Quiggin, P. Non-linear hysteretic seabed model for catenary pipeline contact. In Proceedings of the 28th International Conference on Ocean, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Gong, S.F.; Xu, P. Influences of pipe–soil interaction on dynamic behaviour of deepwater S-lay pipeline under random sea states. Ships Offshore Struct. 2017, 12, 370–387. [Google Scholar] [CrossRef]
- Ai, S.M.; Sun, L.P.; Tao, L.B.; Yim, C.S. Modeling and simulation of deepwater pipeline S-lay with coupled dynamic positioning. J. Offshore Mech. Arct. Eng. 2018, 140, 051704. [Google Scholar] [CrossRef]
- Slunyaev, A.; Pelinovsky, E.; Sergeeva, A.; Chabchoub, A.; Hoffmann, N.; Onorato, M.; Akhmediev, N. Super-rogue Waves in Simulations Based on Weakly Nonlinear and Fully Nonlinear Hydrodynamic Equations. Phys. Rev. E Stat. Nonlinear Soft Matter Phys. 2013, 88, 012909. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.Y.; Yang, J.M.; Fu, S.X. Numerical Study of the Generation and Evolution of Breather-type Rogue Waves. Ships Offshore Struct. 2017, 12, 66–76. [Google Scholar] [CrossRef]
- Morison, J.R.; O’Brien, M.D.; Johnson, J.W.; Schaaf, S.A. The force exerted by surface waves on piles. J. Pet. Technol. 1950, 2, 149–154. [Google Scholar] [CrossRef]
- White, D.J.; Cheuk, C.Y. Modelling the soil resistance on seabed pipelines during large cycles of lateral movement. Mar. Struct. 2008, 21, 59–79. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D (mm) | t’p (mm) | ρp (kg/m3) | E (MPa) | v | σy (MPa) | tc (mm) | ρc (kg/m3) | wa (N/m) | ws (N/m) |
|---|---|---|---|---|---|---|---|---|---|
| 323.9 | 23.8 | 7850 | 2.07 × 105 | 0.3 | 448 | 3.0 | 950 | 1754.9 | 917.2 |
| Su0 (kPa) | Sug (kPa/m) | ρsoil (t/m3) | a | b | Kmax | fsuc | λsuc | λrep | fb | μ | ks (kN/m3) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.5 | 1.5 | 1.5 | 6.0 | 0.25 | 200 | 0.6 | 1.0 | 0.3 | 1.5 | 0.55 | 33.3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Du, Z.; Gong, S. Numerical Investigation into Freak Wave Effects on Deepwater Pipeline Installation. J. Mar. Sci. Eng. 2020, 8, 119. https://doi.org/10.3390/jmse8020119
Xu P, Du Z, Gong S. Numerical Investigation into Freak Wave Effects on Deepwater Pipeline Installation. Journal of Marine Science and Engineering. 2020; 8(2):119. https://doi.org/10.3390/jmse8020119
Chicago/Turabian StyleXu, Pu, Zhixin Du, and Shunfeng Gong. 2020. "Numerical Investigation into Freak Wave Effects on Deepwater Pipeline Installation" Journal of Marine Science and Engineering 8, no. 2: 119. https://doi.org/10.3390/jmse8020119
APA StyleXu, P., Du, Z., & Gong, S. (2020). Numerical Investigation into Freak Wave Effects on Deepwater Pipeline Installation. Journal of Marine Science and Engineering, 8(2), 119. https://doi.org/10.3390/jmse8020119