Kalman Filters for Leak Diagnosis in Pipelines: Brief History and Future Research

 , ,
, ,  and
and 
Abstract
:1. Introduction
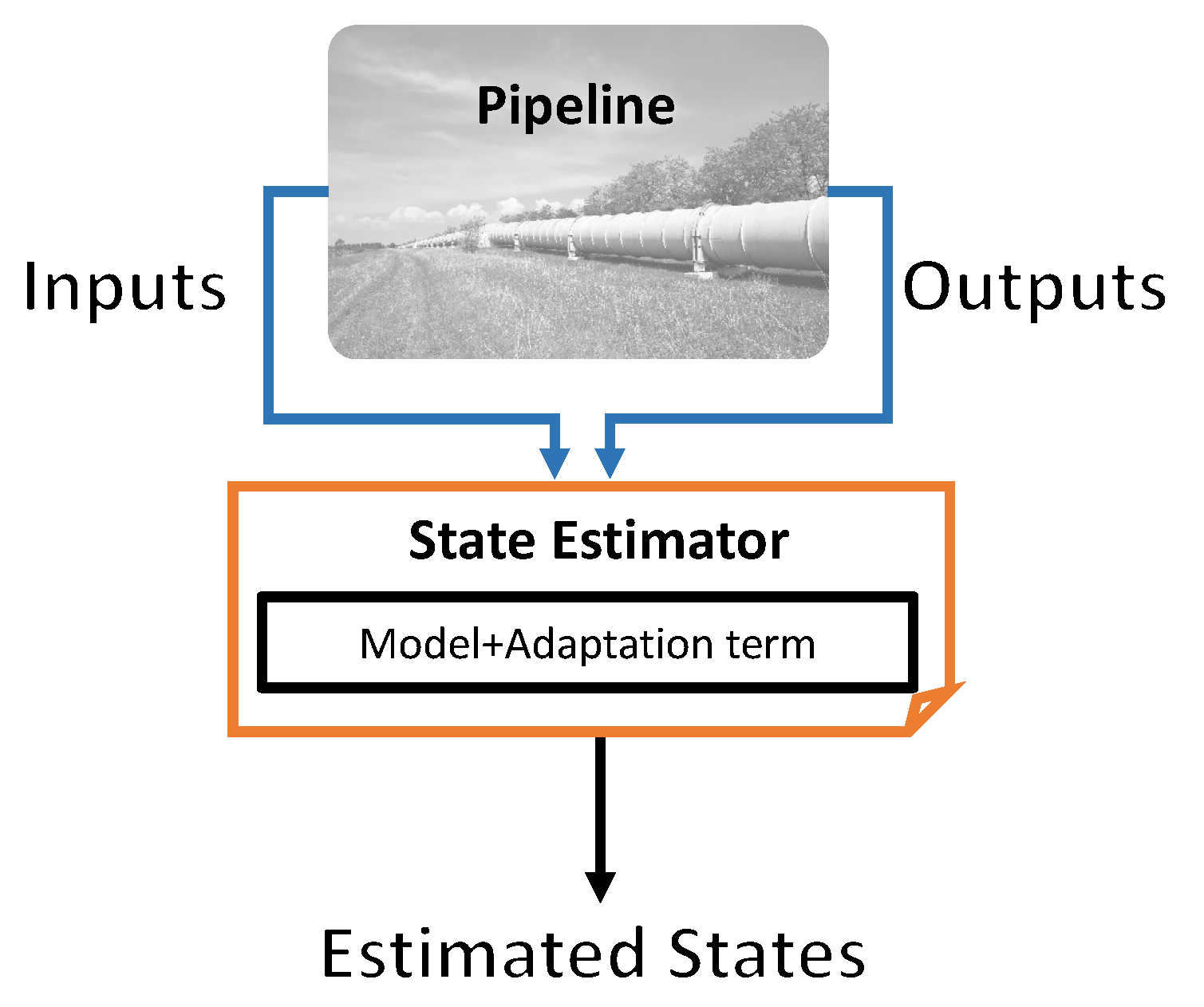
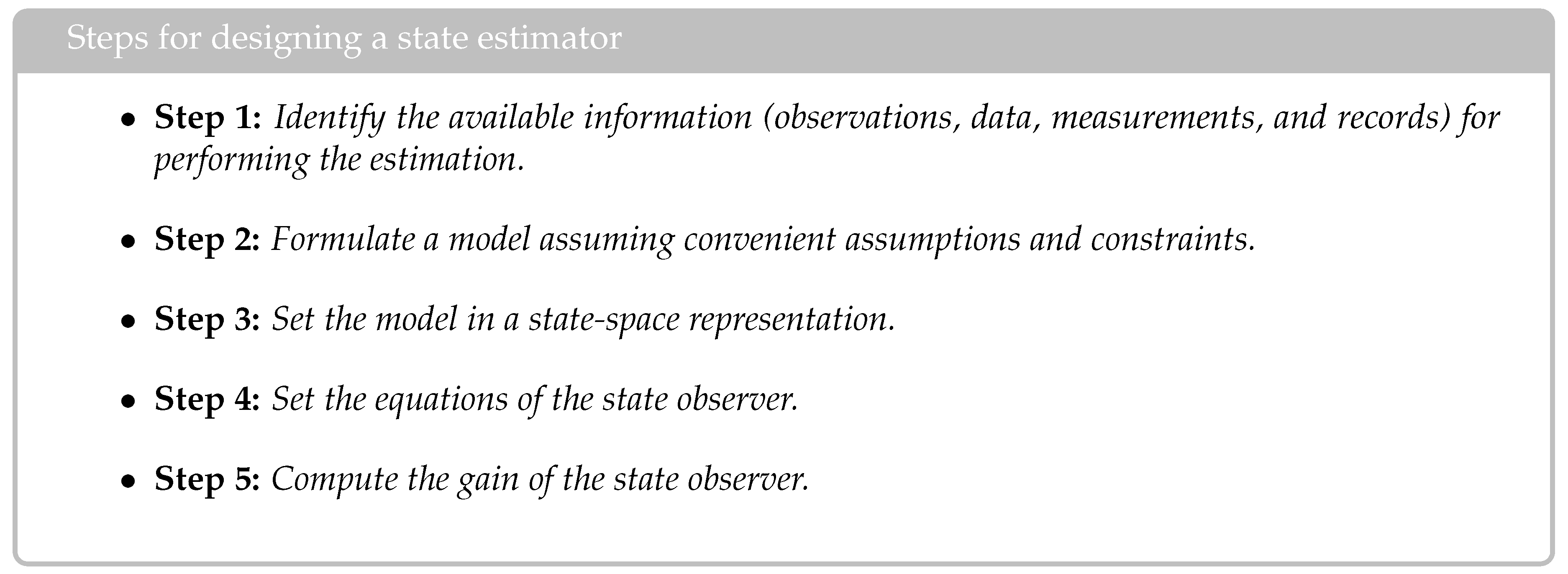
2. State Estimators
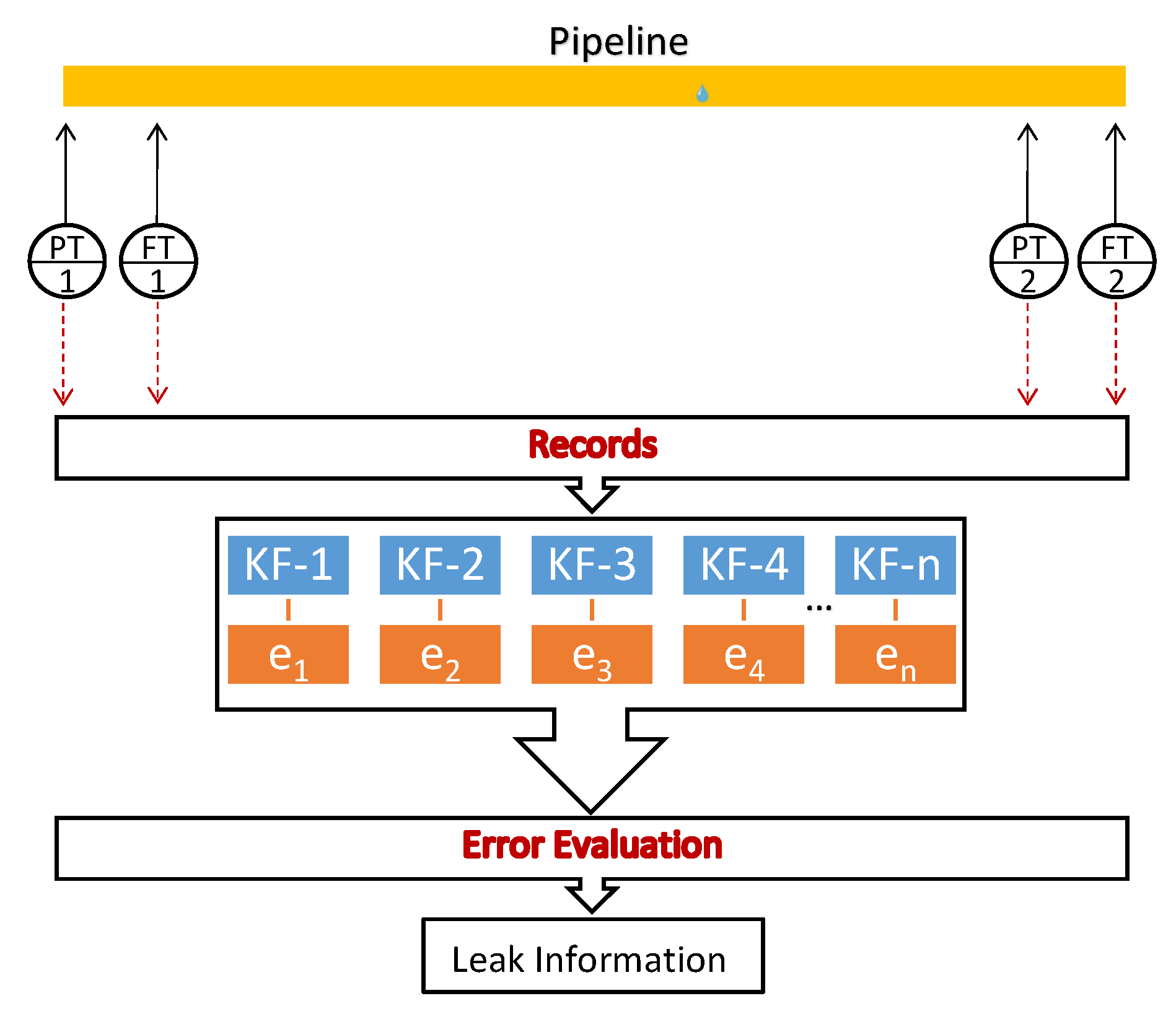
3. A Proposed Classification for the Kalman Filter-Based Approaches
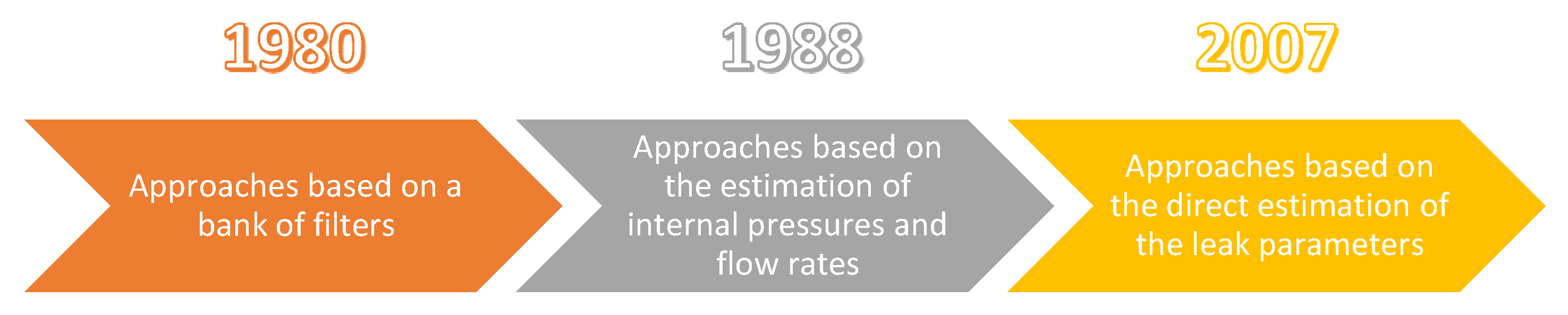
4. Brief History
5. Future Research
Author Contributions
Funding
Conflicts of Interest
Appendix A. Reminders about the Kalman Filter
Appendix A.1. The Discrete Kalman Filter
Prediction Phase
Correction Phase

Appendix A.2. Extended Kalman Filter
Prediction Phase
Correction Phase
Appendix A.3. Extended Kalman Filter for Parameter Estimation
Appendix A.4. Continuous Extended Kalman Filter With a Prescribed Degree of Stability
References
- Drumond, G.P.; Pasqualino, I.P.; Pinheiro, B.C.; Estefen, S.F. Pipelines, risers and umbilicals failures: A literature review. Ocean Eng. 2018, 148, 412–425. [Google Scholar] [CrossRef]
- Bermúdez, J.R.; López-Estrada, F.R.; Besançon, G.; Valencia-Palomo, G.; Torres, L.; Hernández, H.R. Modeling and simulation of a hydraulic network for leak diagnosis. Math. Comput. Appl. 2018, 23, 70. [Google Scholar] [CrossRef] [Green Version]
- American Petroleum Institute. API RP 1130 (2007): Computational Pipeline Monitoring for Liquids; American Petroleum Institute: Washington, DC, USA, 2007. [Google Scholar]
- Geiger, G.; Werner, T.; Matko, D. Leak detection and locating-a survey. In Proceedings of the PSIG Annual Meeting, Pipeline Simulation Interest Group, Bern, Switzerland, 15–17 October 2003. [Google Scholar]
- Besançon, G. Nonlinear Observers and Applications; Springer: Berlin, Germany, 2007; p. 224. [Google Scholar]
- Besançon, G. Observer tools for pipeline monitoring. In Modeling and Monitoring of Pipelines and Networks; Springer: Berlin, Germany, 2017; pp. 83–97. [Google Scholar]
- Adegboye, M.A.; Fung, W.K.; Karnik, A. Recent Advances in Pipeline Monitoring and Oil Leakage Detection Technologies: Principles and Approaches. Sensors 2019, 19, 2548. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Simon, D. Kalman filtering with state constraints: a survey of linear and nonlinear algorithms. IET Control Theor. Appl. 2010, 4, 1303–1318. [Google Scholar] [CrossRef] [Green Version]
- Evensen, G. Data Assimilation: The Ensemble Kalman Filter; Springer: New York, NY, USA, 2009. [Google Scholar]
- Digernes, T. Real-Time Failure-Detection and Identification Applied to Supervision of Oil Transport in Pipelines. Model. Identif. Control 1980, 1, 39–49. [Google Scholar] [CrossRef]
- Benkherouf, A.; Allidina, A. Leak detection and location in gas pipelines. IEE Proc. D-Control Theory Appl. 1988, 135, 142–148. [Google Scholar] [CrossRef]
- Besançon, G.; Georges, D.; Begovich, O.; Verde, C.; Aldana, C. Direct observer design for leak detection and estimation in pipelines. In Proceedings of the 2007 European Control Conference (ECC), Kos, Greece, 2–5 July 2007; pp. 5666–5670. [Google Scholar]
- Geiger, I.G. Principles of leak detection. In Fundamentals of Leak Detection; KROHNE Oil and Gas: Reken, Germany, 2005. [Google Scholar]
- Emara-Shabaik, H.; Khulief, Y.; Hussaini, I. A non-linear multiple-model state estimation scheme for pipeline leak detection and isolation. Proc. Instit. Mech. Eng. Part I J. Syst. Control Eng. 2002, 216, 497–512. [Google Scholar] [CrossRef]
- Khulief, Y.; Emara-Shabaik, H. Laboratory investigation of a multiple-model state estimation scheme for detection and isolation of leaks in pipelines. Proc. Instit. Mech. Eng. Part I J. Syst. Control Eng. 2006, 220, 1–13. [Google Scholar] [CrossRef]
- Bai, L.; Yue, Q.; Li, H. Sub-sea Pipelines Leak Detection and Location Based on Fluid Transient and FDI. In Proceedings of the the Fourteenth International Offshore and Polar Engineering Conference, Toulon, France, 23–28 May 2004. [Google Scholar]
- Doney, K. Leak Detection in Pipelines Using the Extended Kalman Filter and the Extended Boundary Approach. Ph.D. Thesis, University of Saskatchewan, Saskatoon, SK, Canada, 10 October 2007. [Google Scholar]
- Begovich, O.; Navarro, A.; Sanchez, E.N.; Besançon, G. Comparison of two detection algorithms for pipeline leaks. In Proceedings of the IEEE International Conference on Control Applications, CCA 2007, Singapore, 1–3 October 2007; pp. 777–782. [Google Scholar]
- Billmann, L.; Isermann, R. Leak detection methods for pipelines. Automatica 1987, 23, 381–385. [Google Scholar] [CrossRef]
- Verde, C. Multi-leak detection and isolation in fluid pipelines. Control Eng. Pract. 2001, 9, 673–682. [Google Scholar] [CrossRef]
- Chaudhry, M.H. Applied Hydraulic Transients; Van Nostrand Reinhold: New York, NY, USA, 1979. [Google Scholar]
- Verde, C.; Bornard, G.; Gentil, S. Isolability of multi-leaks in a pipeline. In Proceedings of the 4th MATHMOD, Vienna, Austria, 5–7 February 2003. [Google Scholar]
- Torres, L.; Besançon, G.; Georges, D. A collocation model for water-hammer dynamics with application to leak detection. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancún, Mexico, 9–11 December 2008; pp. 3890–3894. [Google Scholar]
- Torres, L.; Besançon, G.; Georges, D. Collocation modeling with experimental validation for pipeline dynamics and application to transient data estimations. In Proceedings of the European Control Conference, ECC’09, Budapest, Hungary, 23–26 August 2009. [Google Scholar]
- Dos Santos, P.L.; Azevedo-Perdicoúlis, T.; Ramos, J.; Jank, G.; de Carvalho, J.M.; Milhinhos, J. Gas pipelines LPV modelling and identification for leakage detection. In Proceedings of the American Control Conference (ACC2010), Baltimore, Maryland, USA, 30 June–2 July 2010; pp. 1211–1216. [Google Scholar]
- Navarro, A.; Begovich, O.; Besançon, G.; Dulhoste, J. Real-time leak isolation based on state estimation in a plastic pipeline. In Proceedings of the IEEE International Conference on Control Applications CCA 2011, Denver, CO, USA, 28–30 September 2011; pp. 953–957. [Google Scholar]
- Colombo, A.F.; Karney, B.W. Energy and costs of leaky pipes: toward comprehensive picture. J. Water Resour. Plan. Manag. 2002, 128, 441–450. [Google Scholar] [CrossRef] [Green Version]
- Delgado-Aguiñaga, J.; Begovich, O.; Besançon, G. Varying-parameter modeling and extended Kalman filtering for reliable leak diagnosis under temperature variations. In Proceedings of the 20th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 632–637. [Google Scholar]
- Verde, C.; Torres, L.; González, O. Decentralized scheme for leaks’ location in a branched pipeline. J. Loss Prev. Process Ind. 2016, 43, 18–28. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.A.; Begovich, O. Water Leak Diagnosis in Pressurized Pipelines: A Real Case Study. In Modeling and Monitoring of Pipelines and Networks; Springer: New York, NY, USA, 2017; pp. 235–262. [Google Scholar]
- Navarro, A.; Begovich, O.; Sánchez, J.; Besançon, G. Real-Time Leak Isolation Based on State Estimation with Fitting Loss Coefficient Calibration in a Plastic Pipeline. Asian J. Control 2017, 19, 255–265. [Google Scholar] [CrossRef]
- Santos-Ruiz, I.; Bermúdez, J.; López-Estrada, F.; Puig, V.; Torres, L.; Delgado-Aguiñaga, J. Online leak diagnosis in pipelines using an EKF-based and steady-state mixed approach. Control Eng. Pract. 2018, 81, 55–64. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.; Besançon, G. EKF-based leak diagnosis schemes for pipeline networks. IFAC-PapersOnLine 2018, 51, 723–729. [Google Scholar] [CrossRef]
- Liu, P.; Li, S.; Wang, Z. Multi-leak diagnosis and isolation in oil pipelines based on Unscented Kalman filter. In Proceedings of the 30th Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 2222–2227. [Google Scholar]
- Verde, C. Minimal order nonlinear observer for leak detection. J. Dyn. Syst. Meas. Control 2004, 126, 467–472. [Google Scholar] [CrossRef]
- Verde, C.; Visairo, N. Identificability of multi-leaks in a pipeline. In Proceedings of the American Control Conference (ACC), Boston, MA, USA, 30 June–2 July 2004; Volume 5, pp. 4378–4383. [Google Scholar]
- Gong, J.; Cai, J.; Li, X.; Song, S. Research on state estimation of oil pipeline considering adaptive extended Kalman filtering. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1294–1298. [Google Scholar]
- Yu, Z.; Jian, L.; Zhoumo, Z.; Jin, S. A combined Kalman filter-Discrete wavelet transform method for leakage detection of crude oil pipelines. In Proceedings of the 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009; pp. 3–1086. [Google Scholar]
- Vianna, F.; Orlande, H.; Dulikravich, G. Estimation of the temperature field in pipelines by using the Kalman filter. In Proceedings of the 2nd International Congress of Serbian Society of Mechanics (IConSSM 2009), Palic (Subotica), Serbia, 1–5 June 2009; pp. 1–5. [Google Scholar]
- Ye, G.; Fenner, R.A. Kalman filtering of hydraulic measurements for burst detection in water distribution systems. J. Pipeline Syst. Eng. Pract. 2010, 2, 14–22. [Google Scholar] [CrossRef]
- Dos Santos, P.L.; Azevedo-Perdicoúlis, T.; Jank, G.; Ramos, J.; de Carvalho, J.M. Leakage detection and location in gas pipelines through an LPV identification approach. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 4657–4665. [Google Scholar] [CrossRef]
- Navarro, A.; Begovich, O.; Besançon, G. Calibration of fitting loss coefficients for modelling purpose of a plastic pipeline. In Proceedings of the IEEE 16th Conference on Emerging Technologies & Factory Automation (ETFA), Toulouse, France, 5–9 September 2011; pp. 1–6. [Google Scholar]
- Pizano-Moreno, A.; Begovich, O. Leak isolation with temperature compensation in pipelines. In Proceedings of the 9th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 26–28 September 2012; pp. 1–5. [Google Scholar]
- Padilla, E.A.; Begovich, O. Real-time leak isolation based on a fault model approach algorithm in a water pipeline prototype. IFAC Proc. Vol. 2012, 45, 916–921. [Google Scholar] [CrossRef]
- Modisette, J.P. State estimation of pipeline models using the ensemble Kalman filter. In Proceedings of the PSIG Annual Meeting, Pipeline Simulation Interest Group, Prague, Czech Republic, 16–19 April 2013. [Google Scholar]
- Guillen, M.; Dulhoste, J.F.; Besançon, G.; Scola, I.R.; Santos, R.; Georges, D. Leak detection and location based on improved pipe model and nonlinear observer. In Proceedings of the European Control Conference (ECC2014), Strasbourg, France, 24–27 June 2014; pp. 958–963. [Google Scholar]
- Tian, J.; Wang, S.Q. Design and realization of the Kalman filter based on LabVIEW. Applied Mechanics and Materials. Trans Tech. Publ. 2014, 519, 1276–1280. [Google Scholar]
- Okeya, I.; Kapelan, Z.; Hutton, C.; Naga, D. Online burst detection in a water distribution system using the Kalman filter and hydraulic modelling. Procedia Eng. 2014, 89, 418–427. [Google Scholar] [CrossRef] [Green Version]
- Behrooz, H.A.; Boozarjomehry, R.B. Modeling and state estimation for gas transmission networks. J. Nat. Gas Sci. Eng. 2015, 22, 551–570. [Google Scholar] [CrossRef]
- Al Ghailani, L.; El-Sinawi, A. Dynamic model of a new above-ground pipeline using a Kalman estimator-based system. In Proceedings of the IEEE Conference on Systems, Process and Control (ICSPC), Kuala Lumpur, Malaysia, 19–20 December 2015; pp. 12–15. [Google Scholar]
- Zhou, D. Research on Natural Gas Pipeline Leak Detection Algorithm and Simulation. In Proceedings of the 2015 Chinese Intelligent Automation Conference, Fuzhou, China, 2–19 June 2015; pp. 355–361. [Google Scholar]
- Verde, C.; Rojas, J. Iterative Scheme for Sequential Leaks Location. IFAC-PapersOnLine 2015, 48, 726–731. [Google Scholar] [CrossRef]
- Choi, D.Y.; Kim, S.W.; Choi, M.A.; Geem, Z.W. Adaptive Kalman filter based on adjustable sampling interval in burst detection for water distribution system. Water 2016, 8, 142. [Google Scholar] [CrossRef]
- Durgut, İ.; Leblebicioğlu, M.K. State estimation of transient flow in gas pipelines by a Kalman filter-based estimator. J. Nat. Gas Sci. Eng. 2016, 35, 189–196. [Google Scholar] [CrossRef]
- Delgado-Aguiñaga, J.; Besançon, G.; Begovich, O.; Carvajal, J. Multi-leak diagnosis in pipelines based on Extended Kalman Filter. Control Eng. Pract. 2016, 49, 139–148. [Google Scholar] [CrossRef]
- Brunone, B. Transient test-based technique for leak detection in outfall pipes. J. Water Resour. Plan. Manag. 1999, 125, 302–306. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Lauritzen, S.L. Time series analysis in 1880: A discussion of contributions made by TN Thiele. Int. Stat. Rev./Revue Int. Stat. 1981, 49, 319–331. [Google Scholar] [CrossRef]
- Lauritzen, S.L. Thiele: Pioneer in Statistics; Clarendon Press: Oxford, UK, 2002. [Google Scholar]
- Ljung, L. Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems. IEEE Trans. Autom. Control 1979, 24, 36–50. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Grizzle, J.W. The extended Kalman filter as a local asymptotic observer for nonlinear discrete-time systems. In Proceedings of the American Control Conference, Chicago, IL, USA, 24–26 June 1992; pp. 3365–3369. [Google Scholar]
- Andrews, A. Kalman Filtering: Theory and Practice Using MATLAB; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Springer: New York, NY, USA, 2010. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Contributions |
|---|---|
| 1980–1990 | [10,11] |
| 1990–2000 | - |
| 2000–2010 | [12], [14,15,16], [18], [20], [23,24], [35,36,37,38,39] |
| 2010-Up to the present | [25,26], [28,29,30,31,32,33,34], [40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55], |
| Year | Reference | Country | Fluid | Fault | Testing | FilterType |
| 1980 | Real-time failure-detection and identification applied to supervision of oil transport in pipelines | Norway | Oil | Single leak | Simulation | Kalman Filter |
| 1988 | Leak detection and location in gas pipelines | UK | Gas | Single leak | Simulation | Extended Kalman filter |
| 1988 | Robust observer design for a fluid pipeline | China | Water | NA | Simulation, Laboratory | Kalman Filter |
| 1988 | State estimation of output-decoupled complex systems with application to fluid pipeline | China | Water | NA | Simulation, Laboratory | Extended Kalman filter |
| 1990 | An application of Kalman filter to leak diagnosis of long-distance transport pipelines | China | Generalized Kalman filter | |||
| 2000 | Multi-leak detection and isolation in fluid pipelines | Mexico | Water | Simultaneous leak | Simulation, Laboratory | Kalman filter |
| 2002 | A non-linear multiple-model state estimation scheme for pipeline leak detection and isolation | Saudi Arabia | Water | Single leak | Simulation | Modified Extended Kalman filter |
| 2004 | Minimal order nonlinear observer for leak detection | Mexico | Water | Simultaneous leak | Simulation, Laboratory | Nonlinear Kalman filter |
| 2004 | Identificability of multi-leaks in a pipeline | Mexico | Water | Simultaneous leak | Simulation, Laboratory | Extended Kalman filter |
| 2004 | Sub-sea pipelines leak detection and location based on fluid transient and FDI | Oil, Gas | Industrial pipeline | Extended Kalman filter | ||
| 2005 | Application of Kalman filter in pipeline leak detection | Laboratory | Kalman filter | |||
| 2007 | Leak detection in pipelines using the extended Kalman filter and the extended boundary approach | Canada | Water | Simultaneous leak | Simulation, Laboratory | Extended Kalman filter |
| 2007 | Research on state estimation of oil pipeline considering adaptive extended Kalman filtering | China | Oil | NA | Industrial pipeline | Robust Adaptative Kalman filter |
| 2007 | Direct observer design for leak detection and estimation in pipelines | Mexico, France | Water | Simultaneous leak | Simulation | Extended Kalman Filter |
| 2007 | Comparison of two detection algorithms for pipeline leaks | Mexico, France | Water | Single leak | Laboratory | Extended Kalman filter |
| 2008 | A collocation model for water-hammer dynamics with application to leak detection | Mexico | Water | Single, sequential, simultaneous | Simulation | Extended Kalman filter |
| 2009 | A combined Kalman filter-discrete wavelet transform method for leakage detection of crude oil pipelines | China | Oil | Sequential leak | Industrial pipeline | Kalman Filter |
| 2009 | Estimation of the temperature field in pipelines by using the Kalman filter | Brazil, USA | Oil-gas- water mixture | NA | Industrial pipeline | Kalman filter |
| 2009 | Collocation modeling with experimental validation for pipeline dynamics and application to transient data estimations | France | Water | Single, sequential | Laboratory | Extended Kalman Filter |
| 2010 | Kalman filtering of hydraulic measurements for burst detection in water distribution systems | UK | Water | Single leak | Laboratory, Industrial pipeline | Adaptative Kalman filter |
| 2010 | Gas pipelines LPV modelling and identification for leakage detection | Portugal, USA, Germany | Gas | Single leak | Industrial pipeline | Kalman filter |
| 2011 | Real-time leak isolation based on state estimation in a plastic pipeline | Mexico, France, Venezuela | Water | Single leak | Laboratory | Extended Kalman filter |
| 2011 | Leakage detection and location in gas pipelines through an LPV identification approach | Portugal, US, Germany | Gas | Single leak | Industrial pipeline | Kalman filter |
| 2011 | Calibration of fitting loss coefficients for modelling purpose of a plastic pipeline | Mexico, France | Water | NA | Laboratory | Extended Kalman Filter |
| 2012 | Leak isolation with temperature compensation in pipelines | Mexico | Water | Single leak | Laboratory | Extended Kalman filter |
| 2012 | Real-time leak isolation based on a fault model approach algorithm in a water pipeline prototype | Mexico | Water | Single leak | Laboratory | Extended Kalman filter |
| 2013 | State estimation of pipeline models using the ensemble kalman filter | US | Gas | Single leak | Simulation | Ensemble Kalman filter |
| 2014 | Leak detection and location based on improved pipe model and nonlinear observer | Venezuela, France | Water | Single leak | Simulation, Laboratory | Extended Kalman filter |
| 2014 | Design and realization of the Kalman filter based on LabVIEW | China | Water | NA | Simulation | Kalman filter |
| 2014 | Online burst detection in a water distribution system using the Kalman filter and hydraulic modelling | UK | Water | Single leak | Industrial pipeline | Kalman filter |
| 2015 | Modeling and state estimation for gas transmission networks | Iran | Gas | NA | Simulation | Extended Kalman filter |
| 2015 | Dynamic model of a new above-ground pipeline using a Kalman estimator-based system | United Arab Emirates | NA | Laboratory | Kalman filter | |
| 2016 | Research on natural gas pipeline leak detection algorithm and simulation | Mexico, France | Water | Single leak | Laboratory | Adaptative Kalman filter |
| 2017 | Water Leak diagnosis in pressurized pipelines: a real case study | Mexico | Water | Single leak | Laboratory | Extended Kalman filter |
| 2017 | Real-Time Leak Isolation Based on State Estimation with Fitting Loss Coefficient Calibration in a Plastic Pipeline | Mexico, France | Water | Single leak | Laboratory | Extended Kalman filter |
| 2018 | Online leak diagnosis in pipelines using an EKF-based and steady-state mixed approach | Mexico, Spain | Water | Single leak | Laboratory | Extended Kalman filter |
| 2018 | EKF-based leak diagnosis schemes for pipeline networks | Mexico, France | Water | Single leak | Laboratory | Extended Kalman filter |
| 2018 | Multi-leak diagnosis and isolation in oil pipelines based on Unscented Kalman filter | China | Water | Single leak | Simulation | Unscented Kalman filter |
| Paper | Results | Application |
|---|---|---|
| A combined Kalman filter—discrete wavelet transform method for leakage detection of crude oil pipelines. | Reliability: 5% of false alarms. Accuracy: 0.26% of error | Main pipelines |
| Gas pipelines LPV modelling and identfication for leakage detection. | Sensitivity: A leak about of the nominal flow rate was detected 24 minutes after its occurrence | Main pipelines |
| Identificability of multi-leaks in a pipeline | Accuracy: of error | Main pipelines |
| Minimal order nonlinear observer for leak detection. | Accuracy: of error with respect to the pipeline length in a noisy data scenario. | Main pipelines |
| Online burst detection in a water distribution system using the Kalman filter and hydraulic modelling. | Reliability: of detected burst. | Pipeline networks |
| Real-time leak isolation based on a fault model approach algorithm in a water pipeline prototype | Accuracy: of error with respect to the ESL. | Main pipelines |
| Research on natural gas pipeline leak detection algorithm and simulation. | Accuracy: of locating error. | Main pipelines |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres, L.; Jiménez-Cabas, J.; González, O.; Molina, L.; López-Estrada, F.-R. Kalman Filters for Leak Diagnosis in Pipelines: Brief History and Future Research. J. Mar. Sci. Eng. 2020, 8, 173. https://doi.org/10.3390/jmse8030173
Torres L, Jiménez-Cabas J, González O, Molina L, López-Estrada F-R. Kalman Filters for Leak Diagnosis in Pipelines: Brief History and Future Research. Journal of Marine Science and Engineering. 2020; 8(3):173. https://doi.org/10.3390/jmse8030173
Chicago/Turabian StyleTorres, Lizeth, Javier Jiménez-Cabas, Omar González, Lázaro Molina, and Francisco-Ronay López-Estrada. 2020. "Kalman Filters for Leak Diagnosis in Pipelines: Brief History and Future Research" Journal of Marine Science and Engineering 8, no. 3: 173. https://doi.org/10.3390/jmse8030173
APA StyleTorres, L., Jiménez-Cabas, J., González, O., Molina, L., & López-Estrada, F. -R. (2020). Kalman Filters for Leak Diagnosis in Pipelines: Brief History and Future Research. Journal of Marine Science and Engineering, 8(3), 173. https://doi.org/10.3390/jmse8030173