Linking Experimental and Numerical Wave Modelling


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Aspects of Basin Wave Modelling
3. Aspects of Numerical Wave Modelling
4. Examples
4.1. Example 1: Reproducing a Single Experimental Wave Event on a Ship with Speed in CFD
4.2. Example 2: Reproducing Model Tests in Long Irregular Wave Sequences in CFD
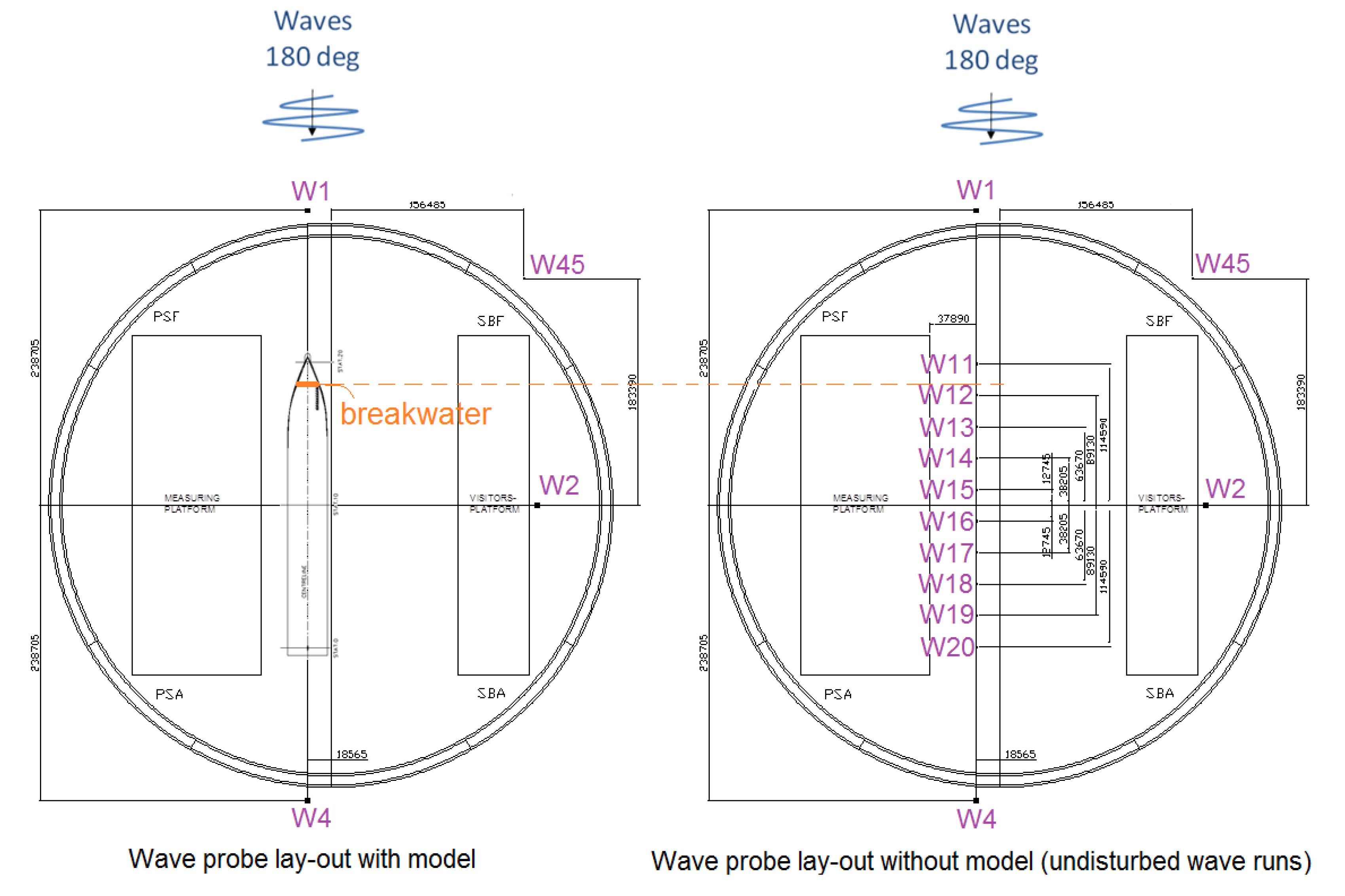
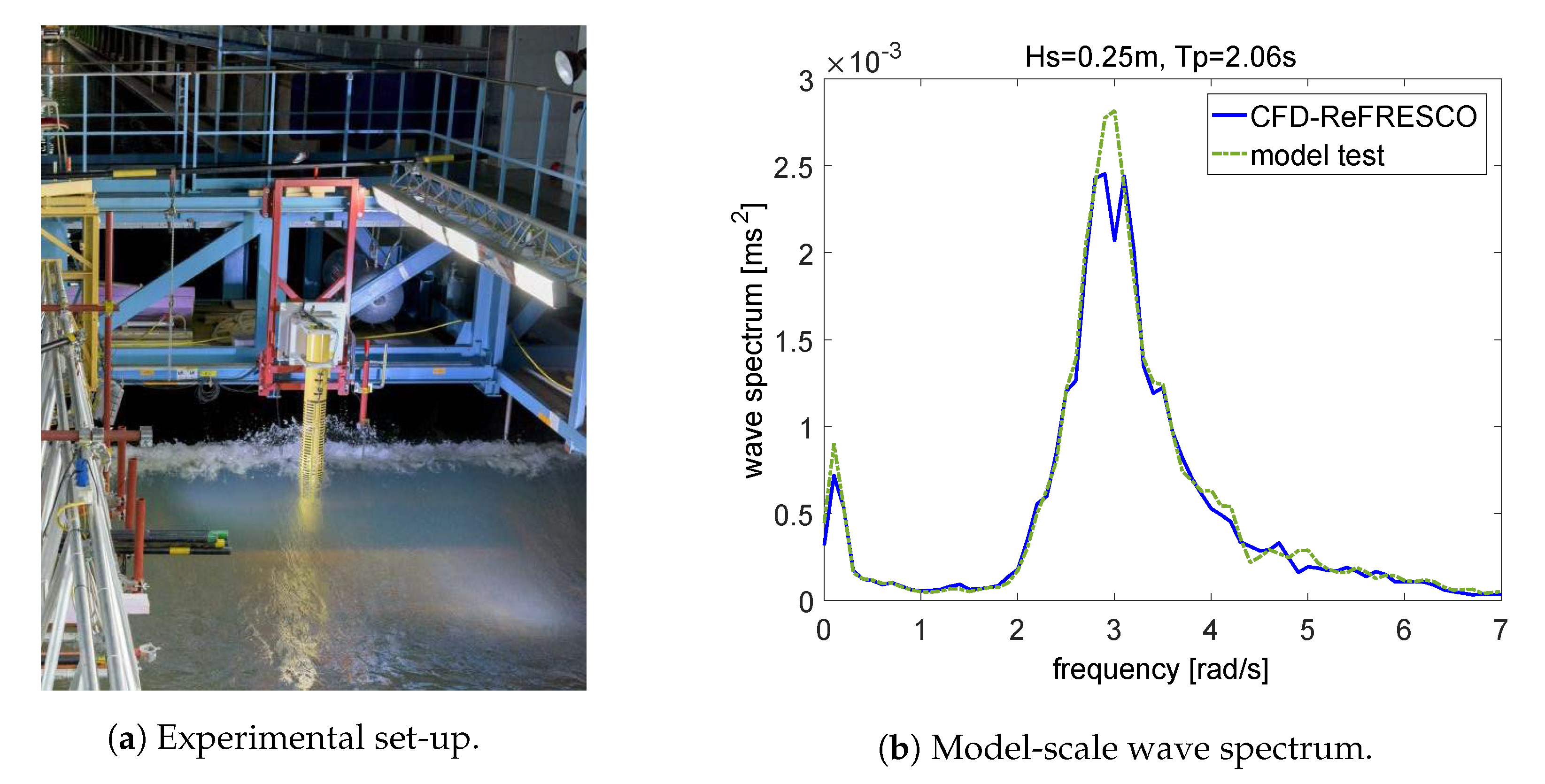
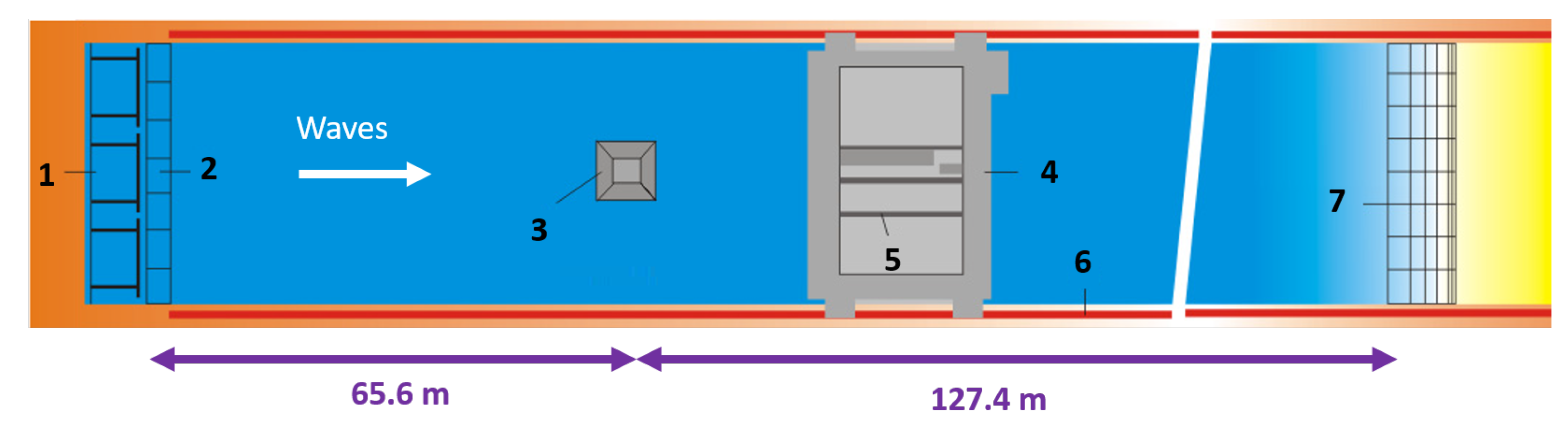
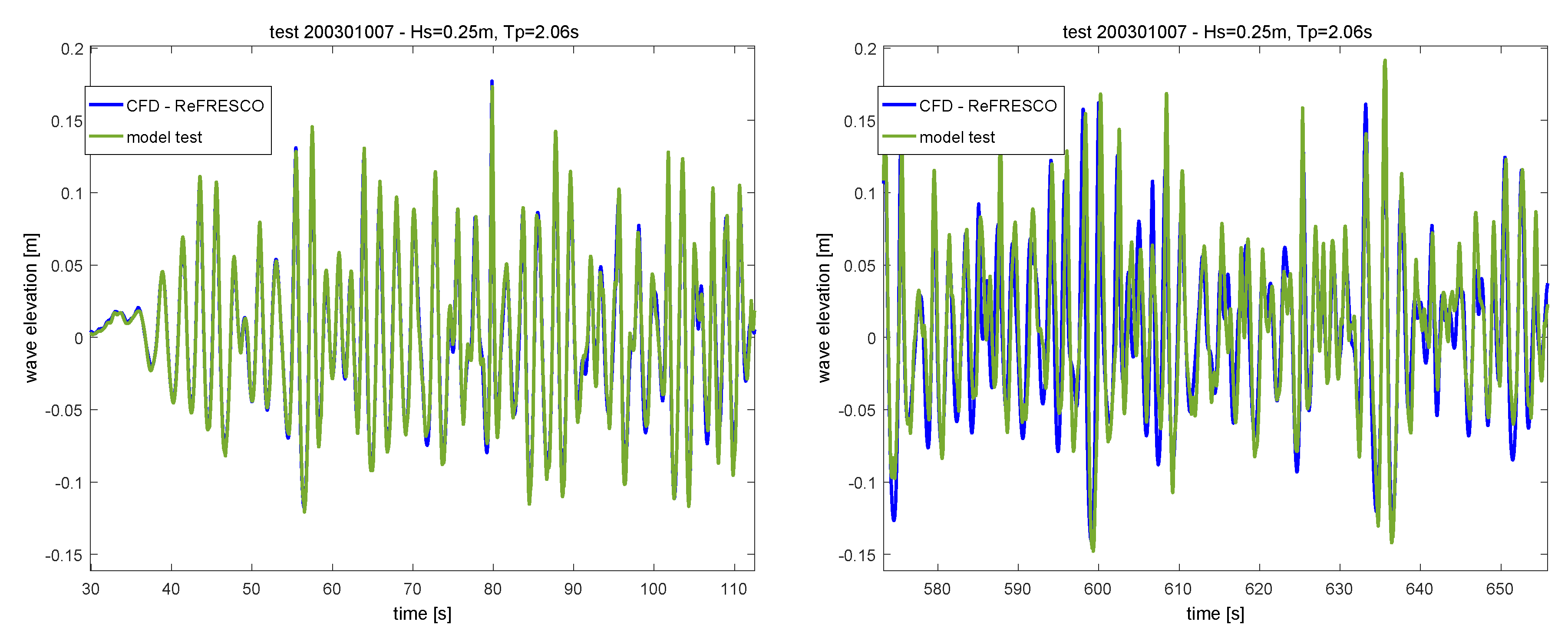
4.2.1. Example 2a: Long Duration Wave Reproduction at an Earth-Fixed Location
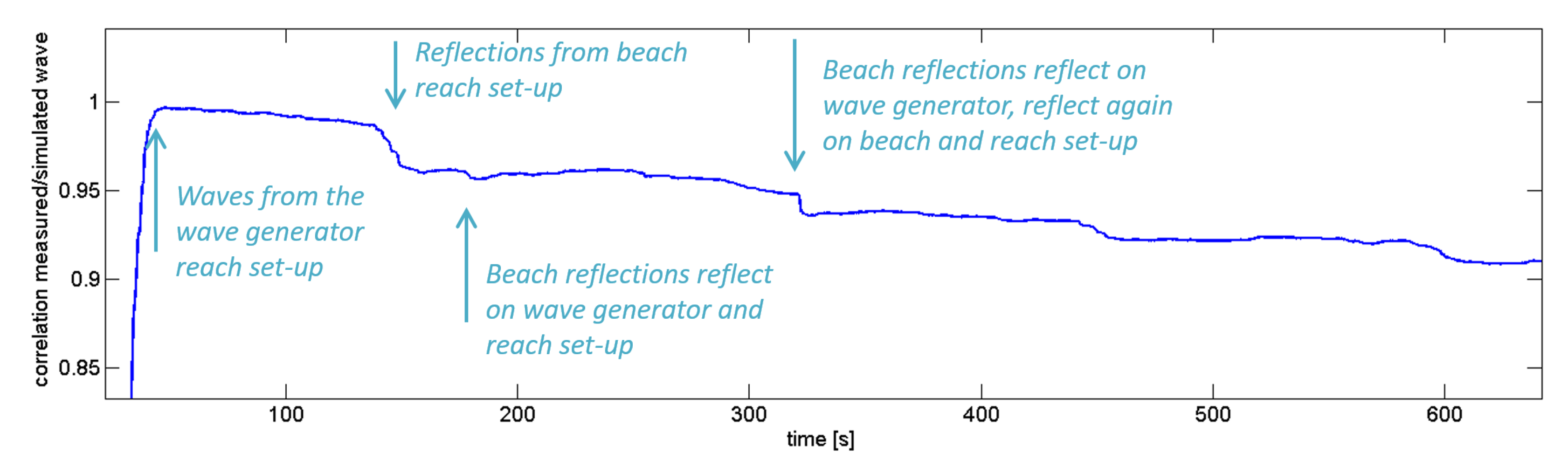
- A deterministic comparison of long time traces is only possible when basin reflections have not arrived at the measurement setup. This happens already quite quickly in a 3.5 h model test (in this case, only 100 s model scales or 600 s full-scales are free of reflections, 5% of total measurement time).
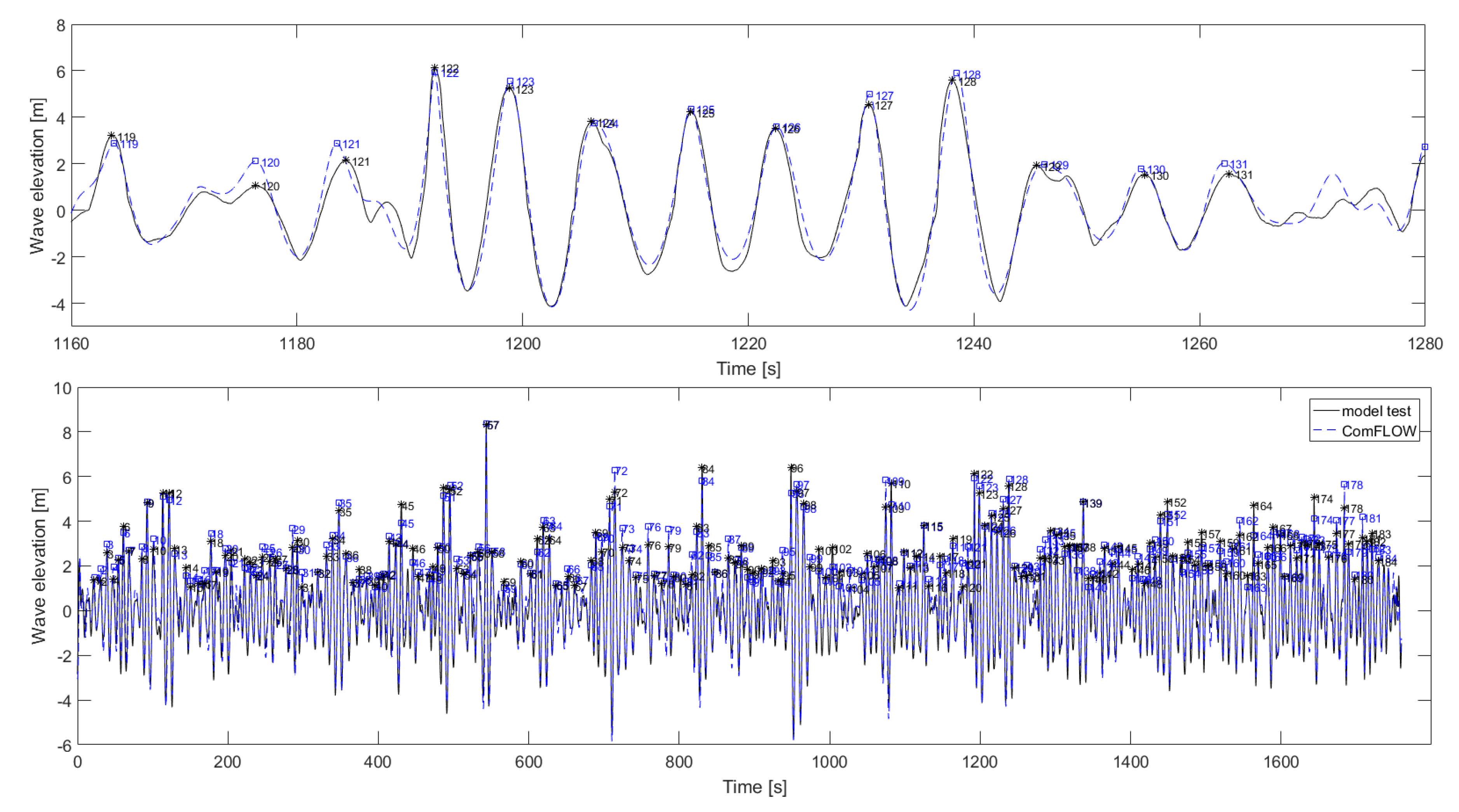
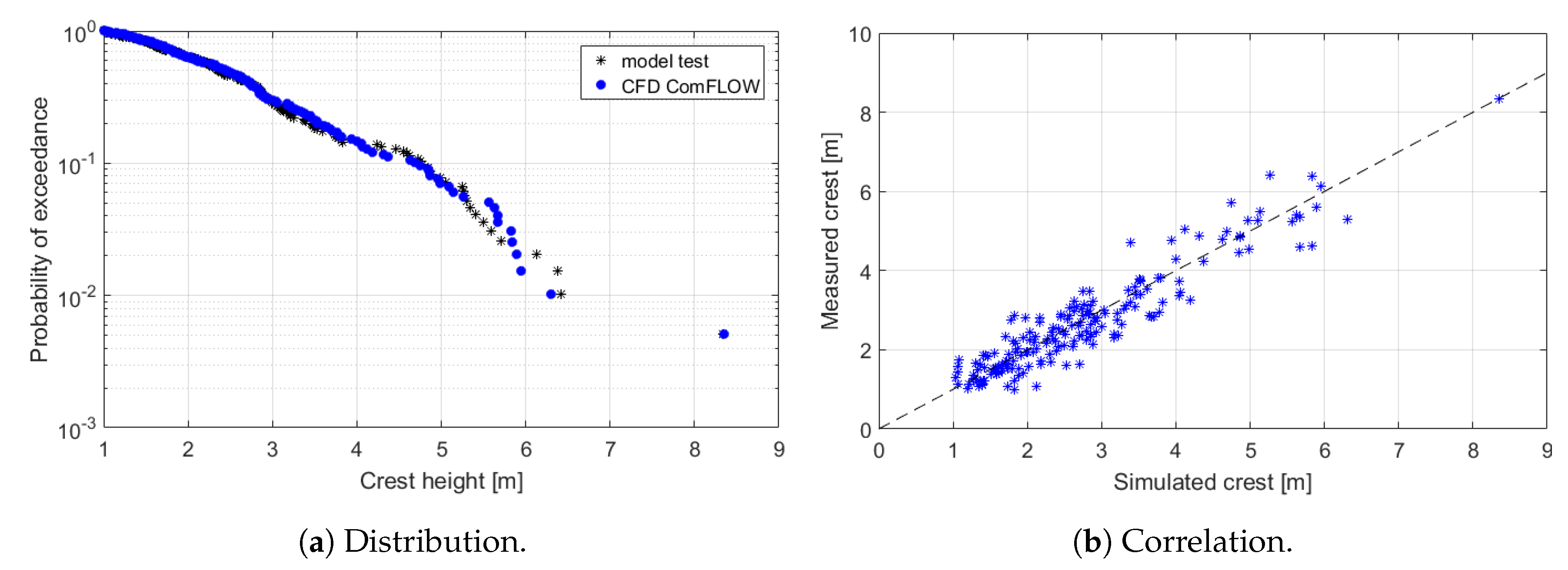
- The correlation between measured and simulated waves at the position of the wind turbine is very good prior to the arrival of basin reflections. The correlation deteriorates after arrival of wave reflections. Improvement can only be obtained by modelling basin effects (beach reflections) in the numerical model.
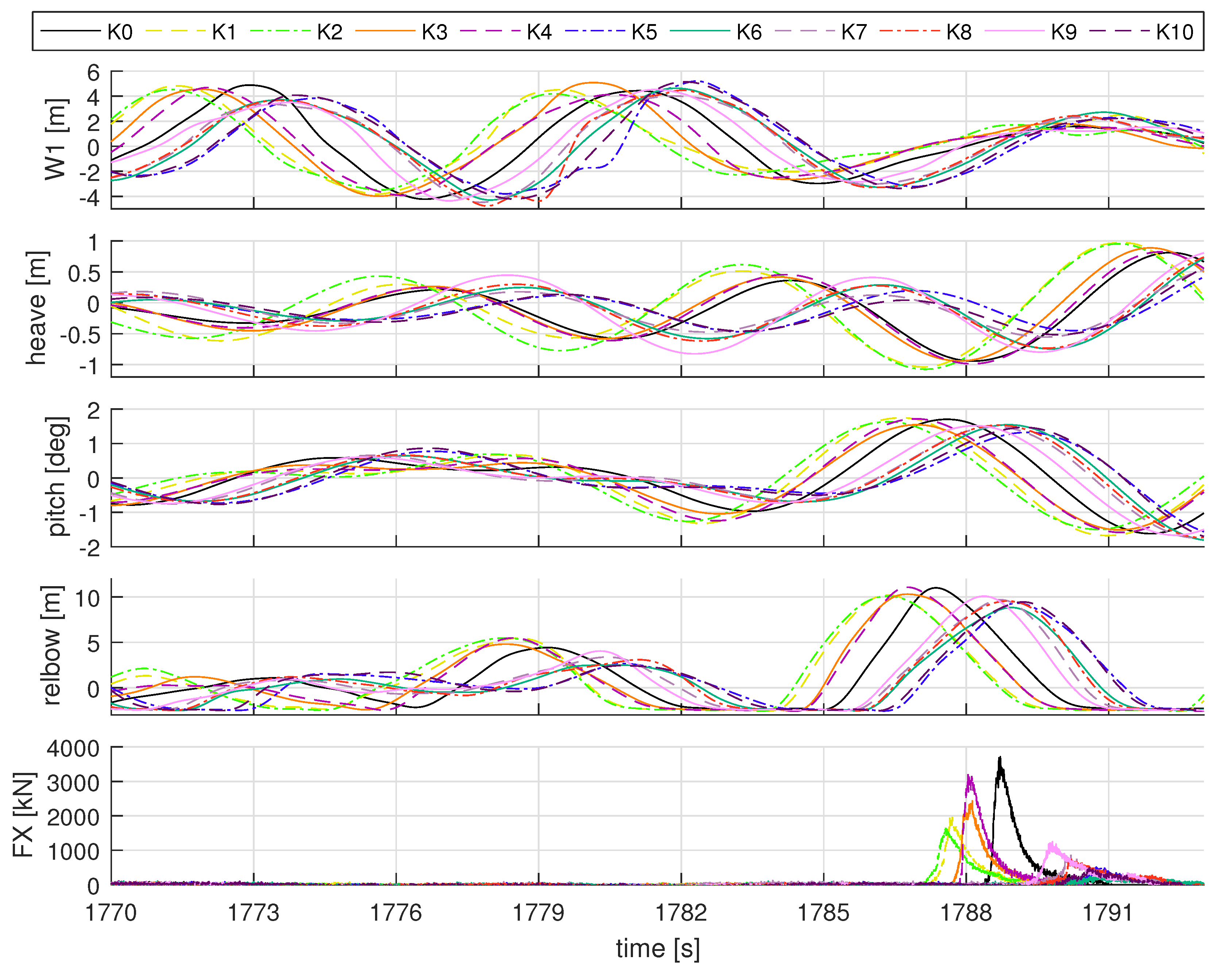
4.2.2. Example 2b: Long Duration Wave Reproduction at Forward Speed
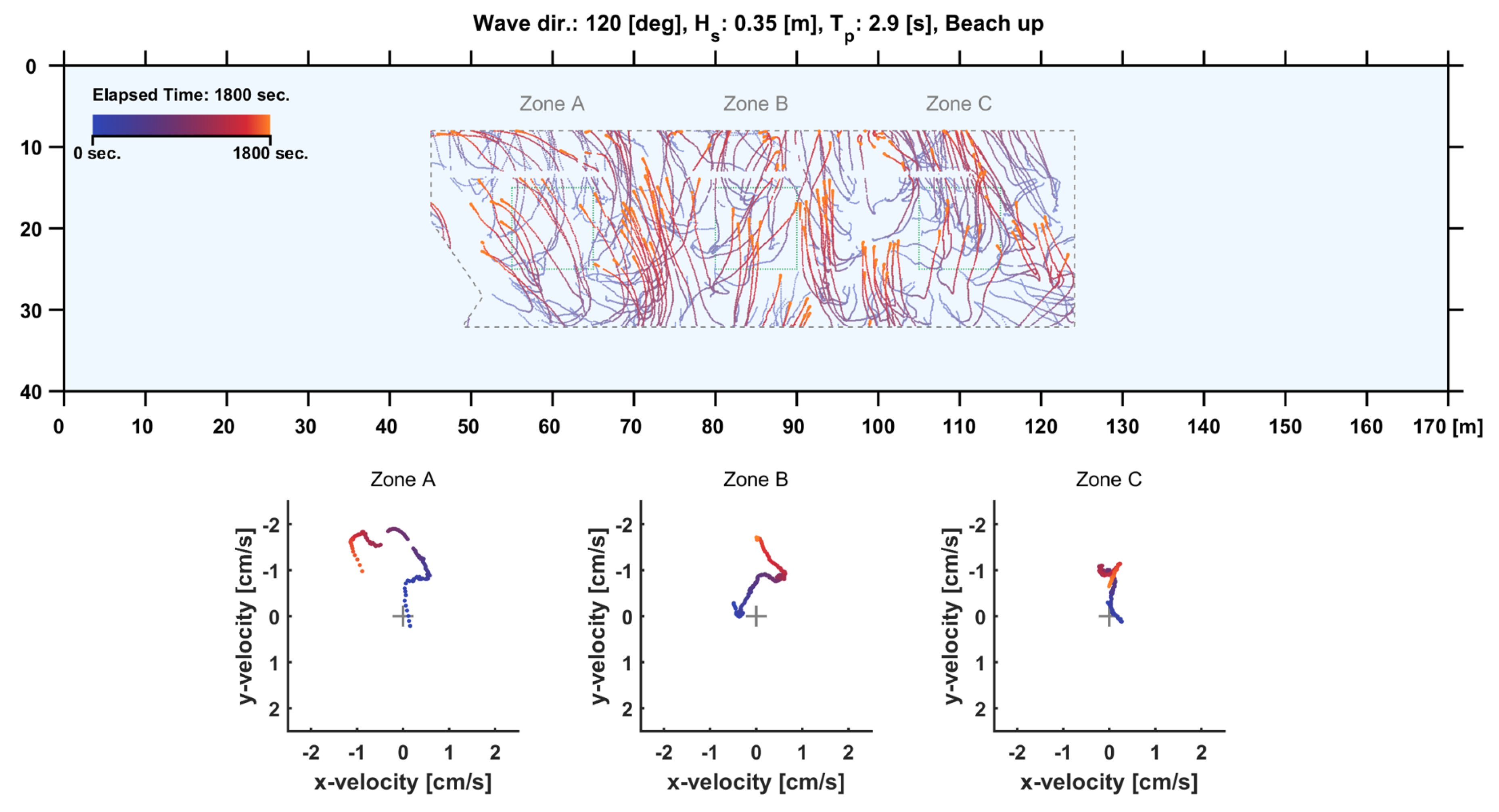
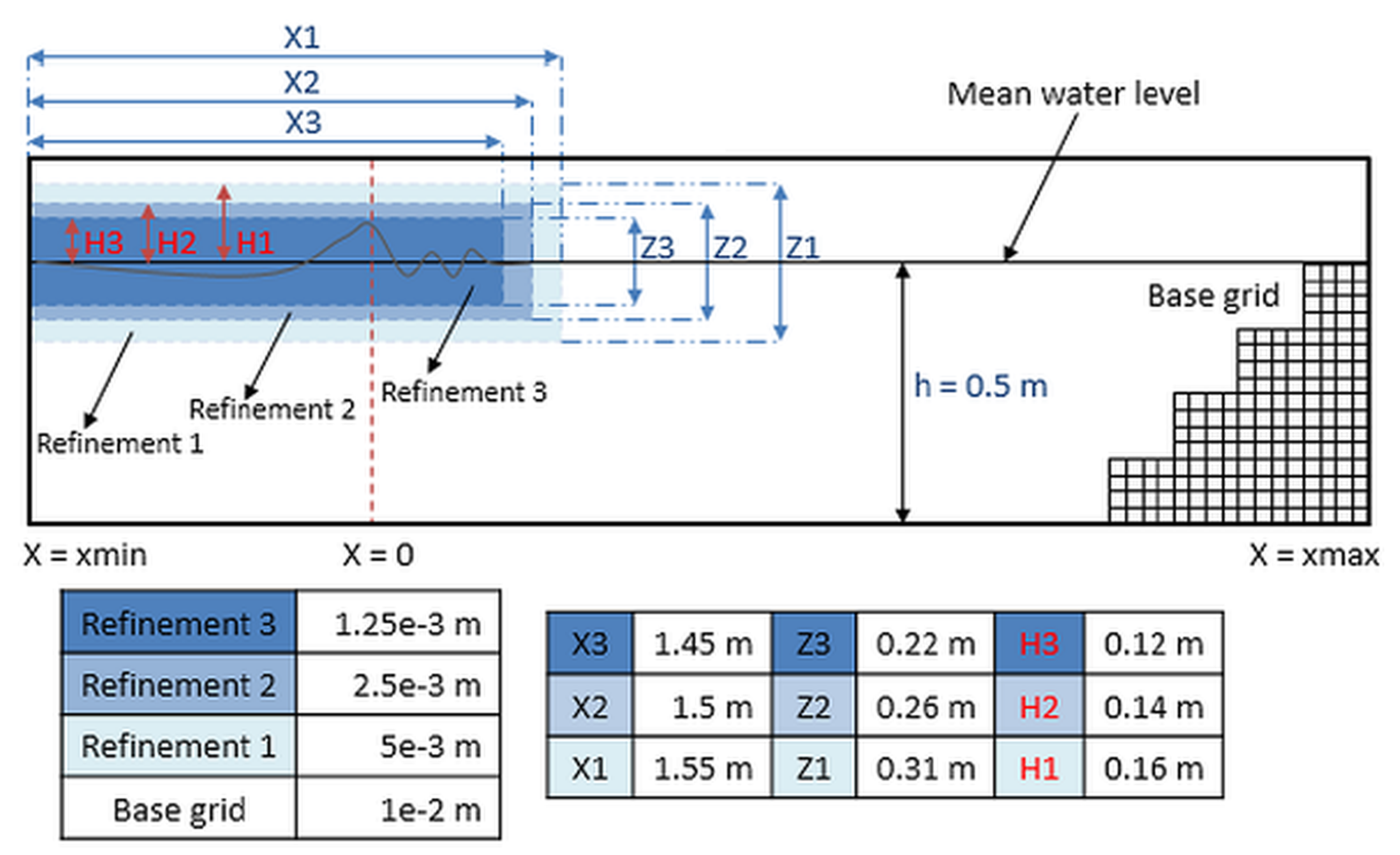
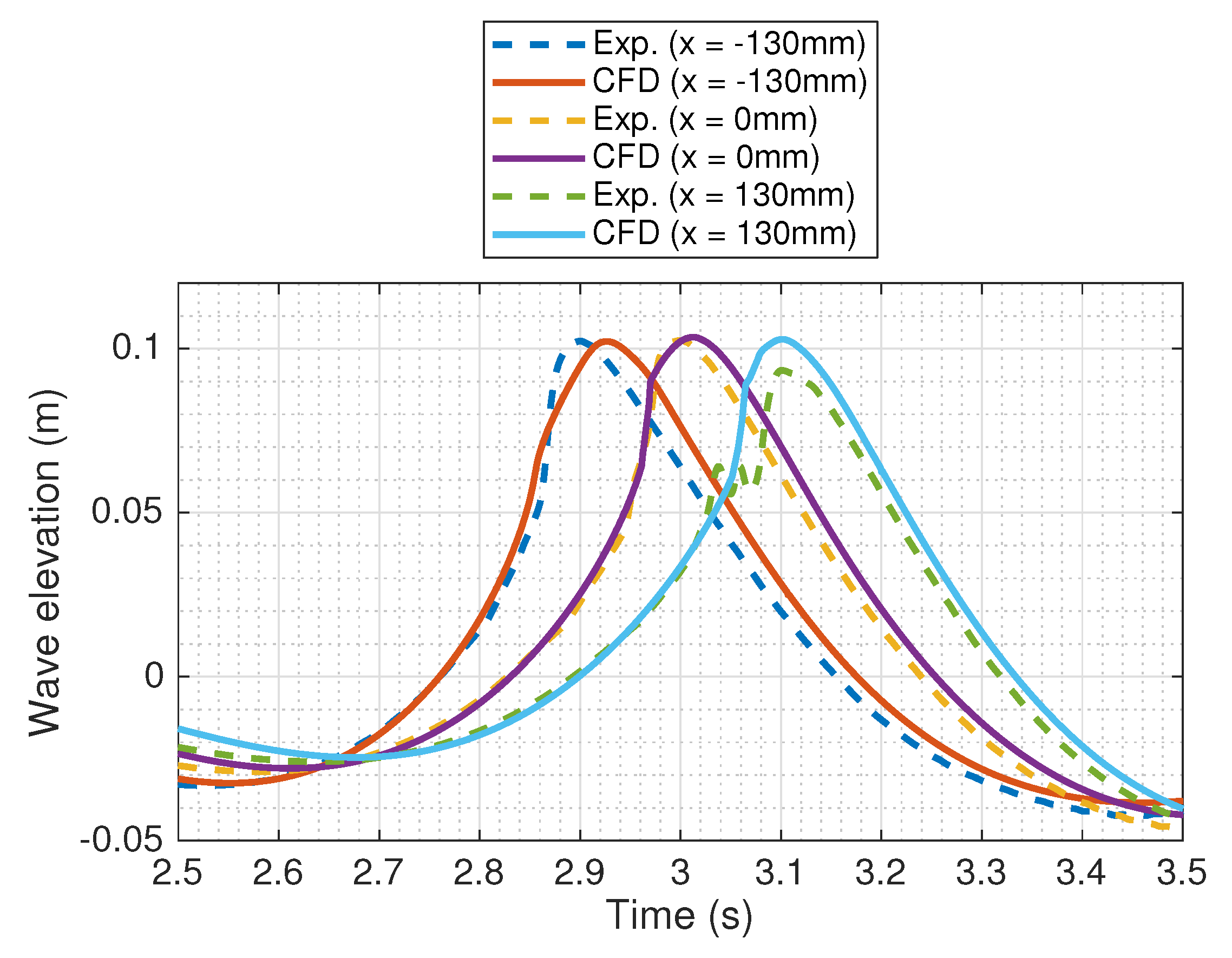
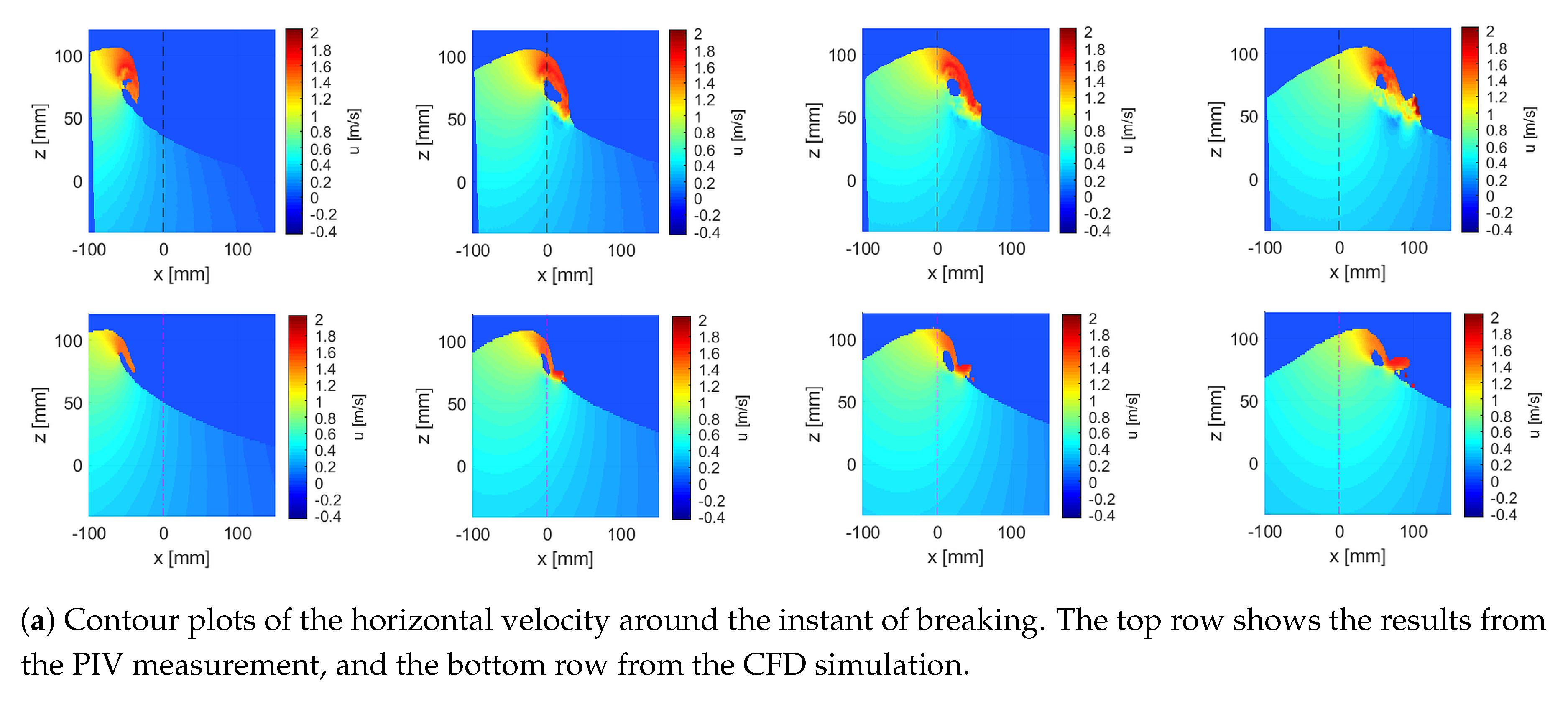
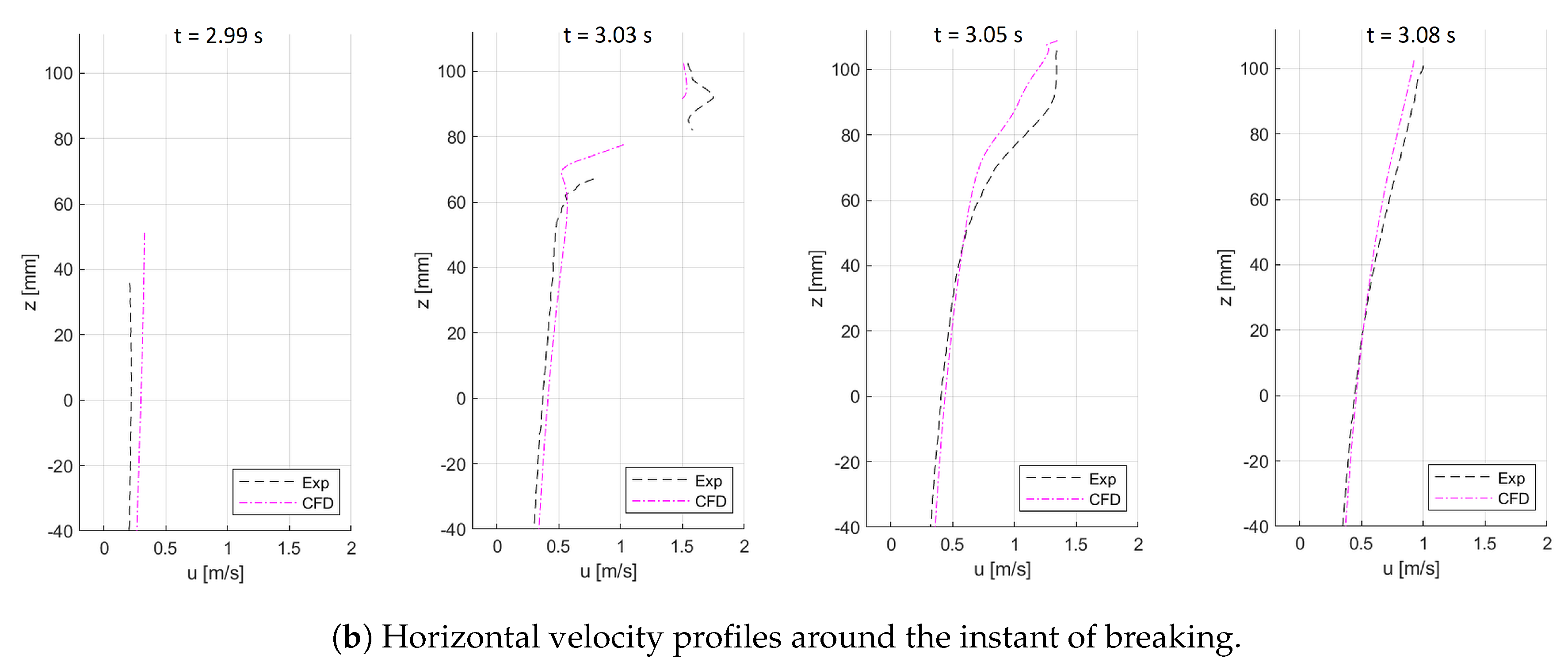
4.3. Example 3: Validating Numerical Wave Kinematics Using PIV Measurements
4.3.1. PIV Measurements
4.3.2. CFD Simulations
4.4. Example 4: Scale Effects in Breaking Waves
5. Conclusions and Future Work
5.1. Conclusions
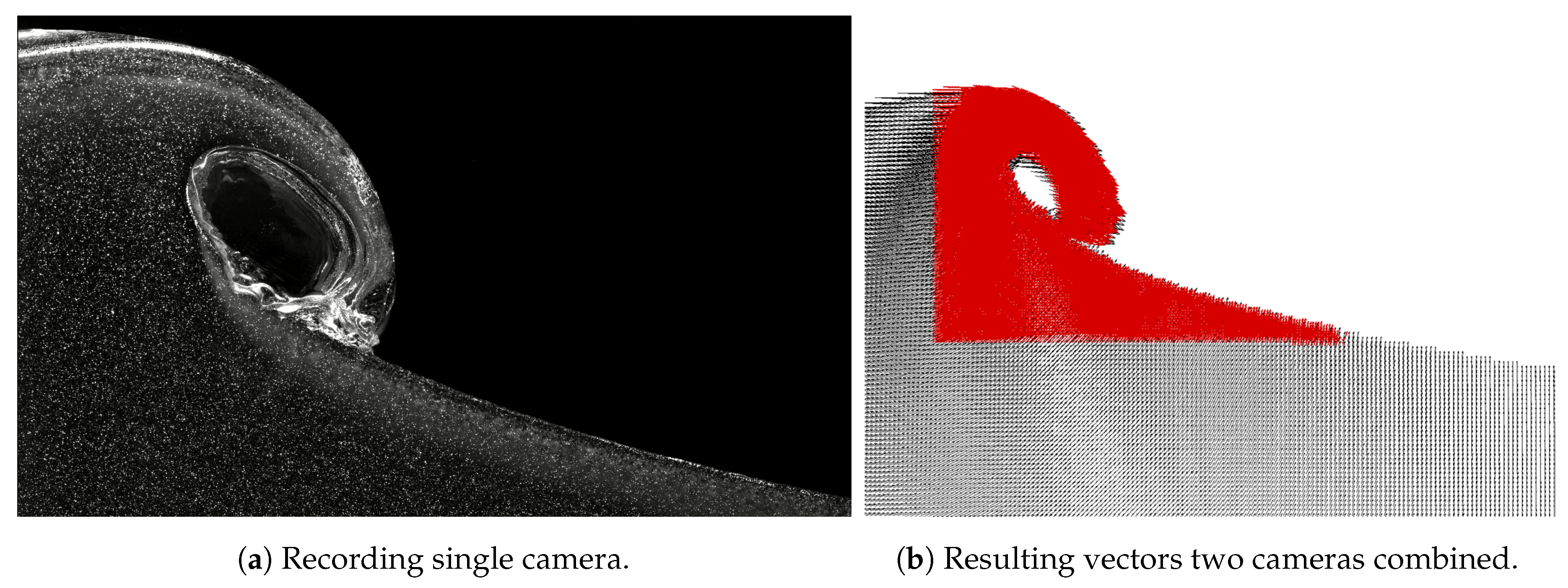
- The kinematics in breaking wave crests can be quite accurately calculated using single-phase CFD without a turbulence model, although the kinematics in the overturning area are somewhat underestimated compared to PIV measurements (which is probably associated with air inclusions).
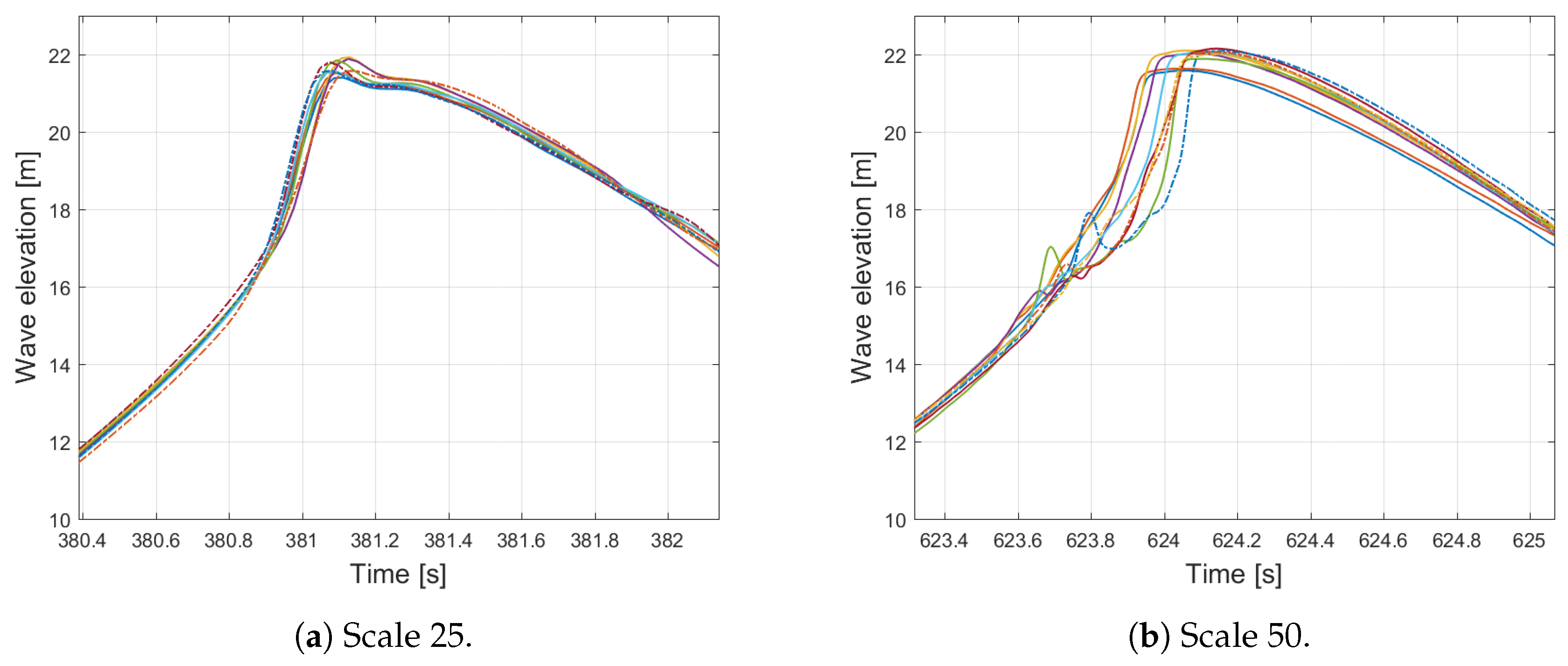
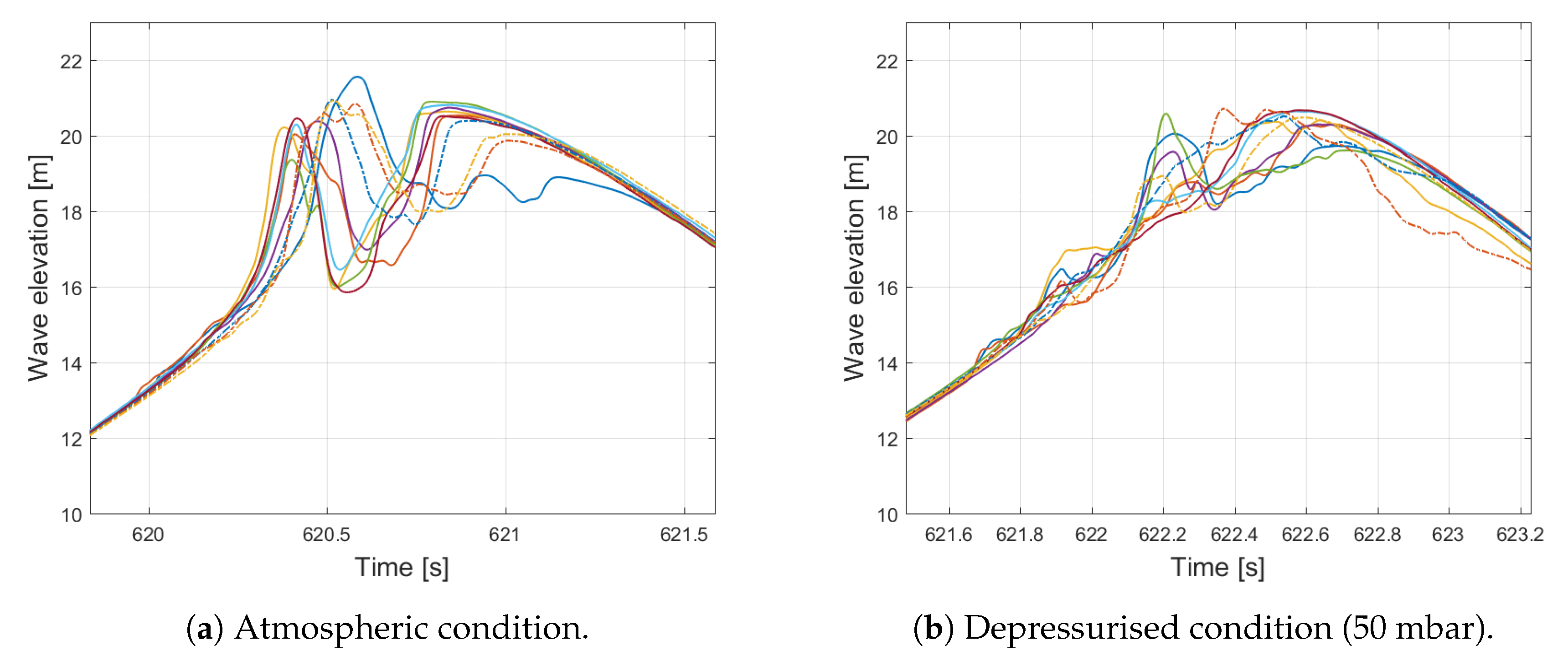
- Scale effects and the effect of air pressure in steep and breaking waves are small, as long as there are no air inclusions or surface instabilities.
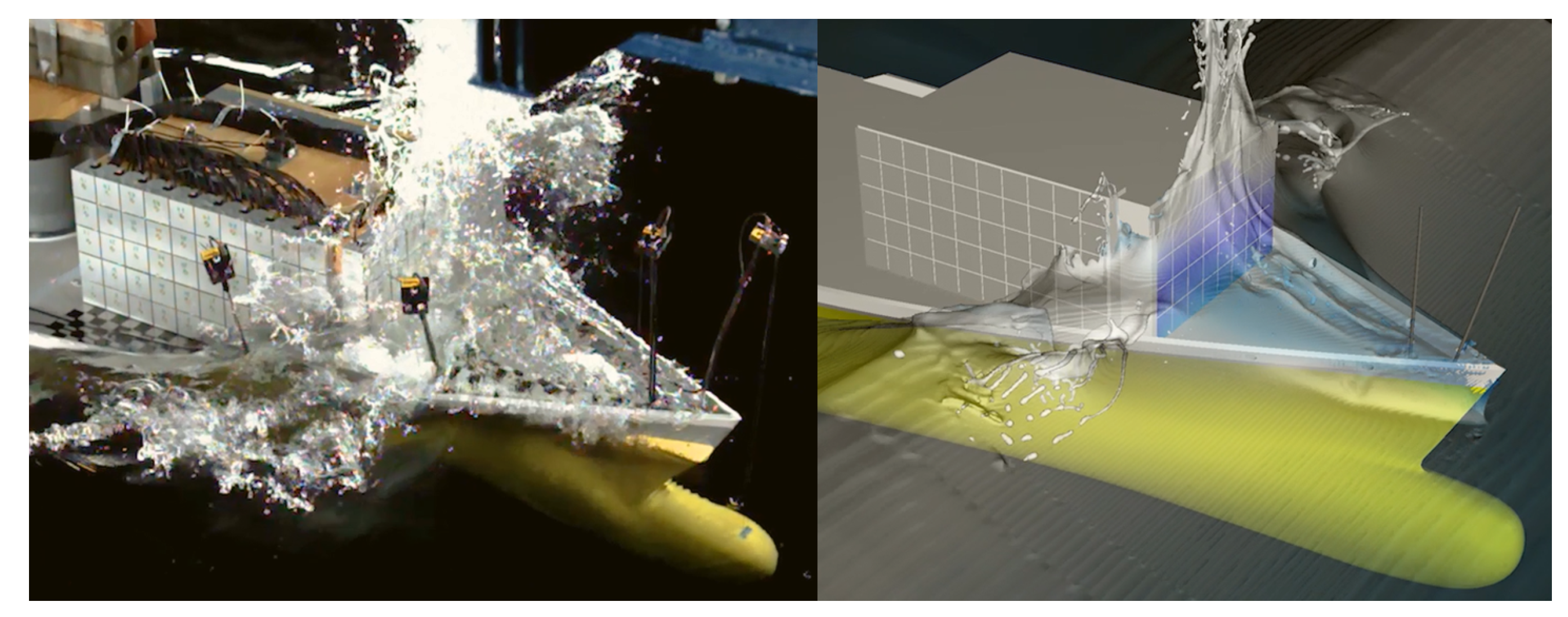
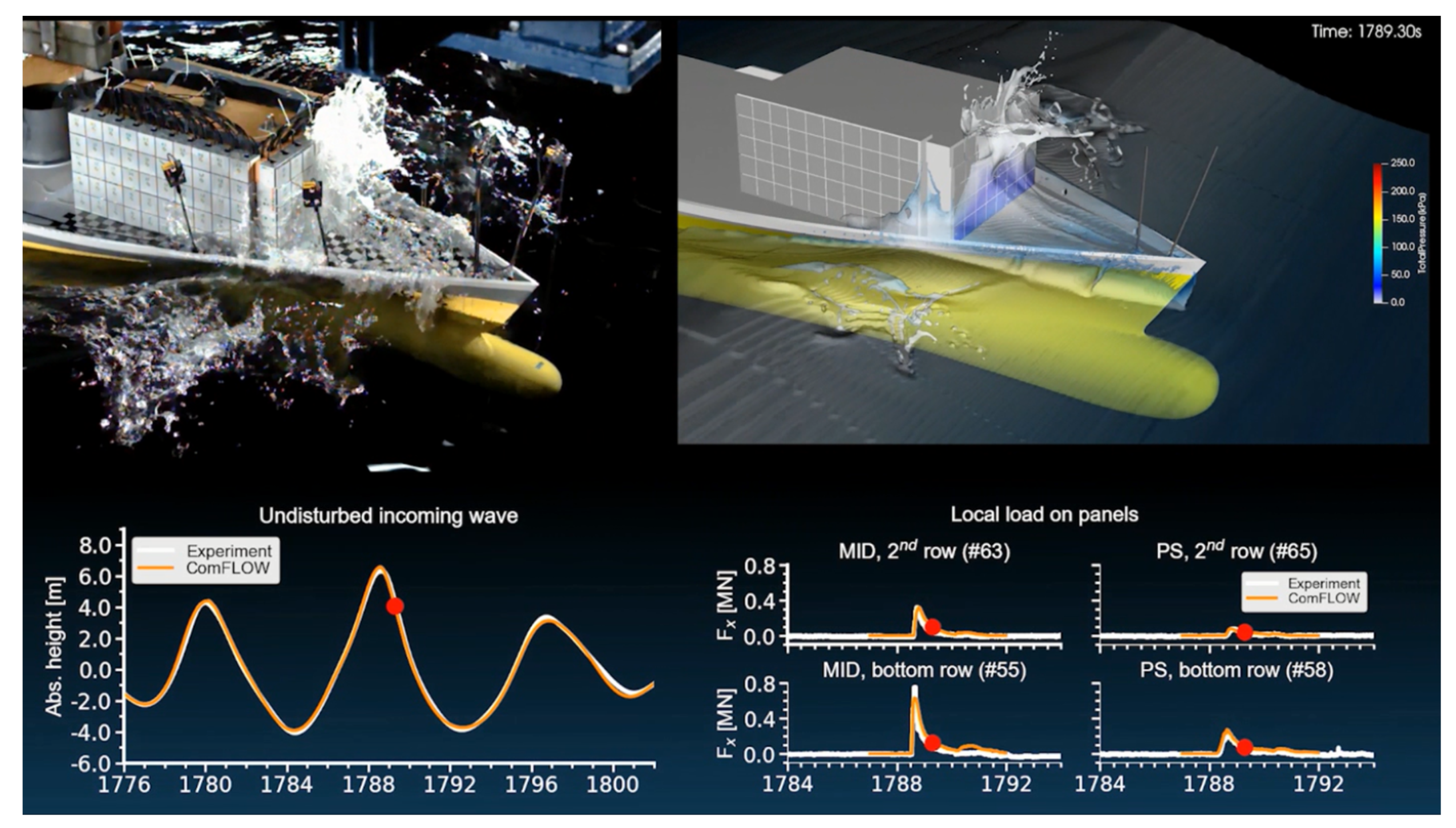
- The above conclusions combined with a case study lead to the conclusion that experimental wave impact loads on a floating structure can be accurately reproduced in CFD, if the wave conditions close to the structure are accurately reproduced and the impact is not associated with air inclusions or surface instabilities. This accurate iterative wave event reconstruction is only required for validation or studies that require an exact match with experiments.
- CFD is too expensive to analyse full scatter diagrams, but quite accurate results within reasonable computational time can be obtained with CFD for 0.5–3 h wave realisations at zero and forward speed.
- The increasing capability to mutually reproduce wave events from different levels of numerical tools and experiments is promising for the future of screening approaches (where lower-order fast numerical tools are used to identify critical events that can be studied using detailed tools such as CFD and experiments). Still, this requires solid validation that the selected fast screening tool is conservative for the studied problem (it cannot miss critical events), but this is outside the scope of the present study.
- The increasing capabilities of numerical tools also raise the bar for experimental facilities, as deterministic comparison directly shows for instance when basin reflections arrive at the measurement location. There is a challenge for experimental facilities to reduce unwanted basin effects, as well as for numerical facilities to accurately model basin constraints (to enable validation studies).
5.2. Future Work: Basin Wave Generation Using CFD Flap Motions
5.3. Future Work: Numerical Shallow-Water Basin Effects
5.4. Future Work: Realistic Waves in Real-Time Simulations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ARC | Active Reflection Compensation |
| CFD | Computational Fluid Dynamics |
| CFL | Courant (Friedrichs Lewy) number |
| CPU | Central Processing Unit |
| CRS | Cooperative Research Ships |
| DWB | Depressurised Wave Basin |
| JIP | Joint Industry Project |
| KCS | KRISO Container Ship |
| LES | Large Eddy Simulation |
| MARIN | MAritime Research Institute Netherlands |
| OB | Offshore Basin |
| PIV | Particle Image Velocimetry |
| RF | Research Flume |
| RMS | Root-Mean-Square |
| SMB | Seakeeping and Manoeuvring Basin |
| SWB | Shallow Water Basin |
| Peak enhancement factor [-] | |
| Significant wave height [m] | |
| t | Time stamp [s] |
| Peak wave period [s] | |
| u | Horizontal velocity [m/s] |
| x | Horizontal x-coordinate [m] |
| z | Vertical z-coordinate [m] |
References
- Allender, J.; Audunson, T.; Barstow, S.F.; Bjerken, S.; Krogstad, H.E.; Steinbakke, P.; Vartdal, L.; Borgman, L.E.; Graham, C. The WADIC project: A comprehensive field evaluation of directional wave instrumentation. Ocean Eng. 1989, 16, 505–536. [Google Scholar] [CrossRef]
- Collins, C.O.; Lund, B.; Waseda, T.; Graber, H.C. On recording sea surface elevation with accelerometer buoys: lessons from ITOP. Ocean Dyn. 2014, 64, 895–904. [Google Scholar] [CrossRef]
- van Essen, S.M.; Ewans, K.; McConochie, J. Wave buoy performance in short and long waves, evaluated using tests on a hexapod (OMAE2018-77092). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- McAllister, M.; van den Bremer, T.S. Lagrangian Measurement of Steep Directionally Spread Ocean Waves: Second-Order Motion of a Wave-Following Measurement Buoy. J. Phys. Oceanogr. 2019, 49, 3087–3108. [Google Scholar] [CrossRef]
- McAllister, M.; van den Bremer, T.S. Experimental Study of the Statistical Properties of Directionally Spread Ocean Waves Measured by Buoys. J. Phys. Oceanogr. 2020, 50, 399–414. [Google Scholar] [CrossRef]
- van Essen, S.M.; van der Hout, A.; Huijsmans, R.H.M.; Waals, O.J. Evaluation of directional analysis methods for low-frequency waves to predict LNGC motion response in nearshore areas (OMAE2013-10235). In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Nantes, France, 9–14 June 2013. [Google Scholar]
- DNV-RP-C205. Recommended Practice C205—Environmental Conditions and Environmental Loads; Det Norske Veritas: Oslo, Norway, 2010. [Google Scholar]
- ITTC2017. Volume II – The Specialist Committee on Modelling of Environmental Conditions. In Proceedings of the 28th International Towing Tank Conference (ITTC), Wuxi, China, 18–22 September 2017. [Google Scholar]
- van Essen, S.M.; Peters, H.C. Design wave and wind environment for minimum power requirements of vessels in the Southern North Sea. In Symposium on the Influence of EEDI on Ship Design and Operations; The Royal Institute of Naval Architects: London, UK, 2017. [Google Scholar]
- Bitner-Gregersen, E.M. Wind and wave climate in open sea and coastal waters (OMAE2017-61854). In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Helder, J.; Bunnik, T. Deterministic breaking wave simulation for offshore applications. In 21st Offshore Symposium; The Society of Naval Architects and Marine Engineers: Houston, TX, USA, 2016. [Google Scholar]
- Bunnik, T.; Stansberg, C.T.; Pákozdi, C.; Fouques, S.; Somers, L. Useful indicators for screening of sea states for wave impacts on fixed and floating platforms (OMAE2018-78544). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Bunnik, T.; Scharnke, J.; de Ridder, E.J. Efficient indicators for screening of random waves for wave impacts on a jacket platform and a fixed offshore wind turbine (OMAE2018-95481). In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]
- Biésel, F.; Suquet, F. Les appareils générateurs de houle en laboratoire - laboratory wave generating apparatus. La Huille Blanche 1951, 4, 147–165. [Google Scholar] [CrossRef] [Green Version]
- Havelock, T.H. Forced surface-waves on water. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1929, 8, 569–576. [Google Scholar] [CrossRef]
- Ursell, F.; Dean, R.; Yu, Y. Forced small-amplitude water waves: A comparison of theory and experiment. J. Fluid Mech. 1960, 7, 33–52. [Google Scholar] [CrossRef]
- Schäffer, H.A. Second-order wavemaker theory for irregular waves. Ocean Eng. 1996, 23, 47–88. [Google Scholar] [CrossRef]
- Schmittner, C.; Scharnke, J.; Pauw, W.; van den Berg, J.; Hennig, J. New methods and insights in advanced and realistic basin wave modelling (OMAE2013-11445). In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Nantes, France, 9–14 June 2013. [Google Scholar]
- Collins, K.M.; Stripling, S.; Simmonds, D.J.; Greaves, D.M. Quantitative metrics for evaluation of wave fields in basins. Ocean Eng. 2018, 169, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Naciri, M.; Buchner, B.; Bunnik, T.; Huijsmans, R.H.M.; Andrews, J. Low frequency motions of LNG carriers moored in shallow water (OMAE2004-51169). In Proceedings of the 23rd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Vancouver, BC, Canada, 20–25 June 2004. [Google Scholar]
- Hasanat Zaman, M.; Peng, H.; Baddour, E.; McKay, S. Spurious waves during generation of multi-chromatic waves in the wave tank in shallow water (OMAE2011-50276). In Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- van Essen, S.M.; Pauw, W.; van den Berg, J. How to deal with basin modes when generating irregular waves on shallow water (OMAE2014-54134). In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Busan, Korea, 19–24 June 2016. [Google Scholar]
- Harris, T.F.W. Nearshore circulations; field observation and experimental investigations of an underlying cause in wave tanks. In Proceedings of the Symposium on Coastal Engineering, Stellenbosch, South Africa, 13 June 1969. [Google Scholar]
- Kim, T.I.; Hudspeth, R.T.; Sulisz, W. Circulation kinematics in nonlinear laboratory waves. In Proceedings of the 20th International Conference on Coastal Engineering (ICCE), Taipei, Taiwan, 9–14 November 1986; pp. 381–395. [Google Scholar]
- Ramsden, J.D.; Nath, J.H. Kinematics and return flow in a closed wave flume. In Proceedings of the 21st International Conference on Coastal Engineering (ICCE), New York, NY, USA, 20–25 June 1988; pp. 448–462. [Google Scholar]
- Hudspeth, R.T.; Sulisz, W. Stokes drift in two-dimensional wave flumes. J. Fluid Mech. 1991, 230, 209–229. [Google Scholar] [CrossRef]
- van Essen, S.M.; Lafeber, W. Wave-induced current in a seakeeping basin (OMAE2017-62203). In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Scharnke, J.; van den Berg, J.; de Wilde, J.; Vestbøstad, T.; Haver, S. Seed variations of extreme sea states and repeatability of extreme crest events in a model test basin (OMAE2012-83303). In Proceedings of the 31st International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rio de Janeiro, Brazil, 1–6 July 2012. [Google Scholar]
- van Essen, S.M. Variability in encountered waves during deterministically repeated seakeeping tests at forward speed (OMAE2019-95065). In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]
- van Essen, S.M. Influence of wave variability on ship response during deterministically repeated seakeeping tests at forward speed. In Proceedings of the 14th International Conference on Practical Design of Ships (PRADS), Yokohama, Japan, 22–26 September 2019. [Google Scholar]
- Bogaert, H. An Experimental Investigation of Sloshing Impact Physics in Membrane LNG Tanks on Floating Structures. Ph.D. Thesis, Technical University of Delft, Delft, The Netherlands, 2018. [Google Scholar]
- Brosset, L.; Mravak, Z.; Kaminski, M.; Collins, S.; Finnigan, T. Overview of Sloshel project. In Proceedings of the 19th International Offshore and Polar Engineering Conference (ISOPE), Osaka, Japan, 21–26 July 2009; Volume 3, pp. 115–124. [Google Scholar]
- Scharnke, J. Elementary loading processes and scale effects involved in wave-in-deck type of loading—A summary of the BreaKin JIP (OMAE2019-95004). In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]
- Stansberg, C.T. Laboratory wave modelling for floating structures in shallow water (OMAE2006-92496). In Proceedings of the 25th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Hamburg, Germany, 4–9 June 2006. [Google Scholar]
- Stansberg, C.T.; Kristiansen, T. Experimental study of slow-drift ship motions in shallow water random waves (OMAE2011-50221). In Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- van Essen, S.M.; Pauw, W.; Schmittner, C. Improvement of shallow-water basin wave generation using ‘anti-waves’ (OMAE2014-23449). In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Bockmann, A.; Gramstad, O.; Helmers, J.B.; Lande, O. Realistic design waves for wave-in-deck problems (OMAE2018-78411). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Johannessen, T.B.; Lande, O. Long term analysis of steep and breaking wave properties by event matching (OMAE2018-78283). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Haley, J.F. Fluid Forcing in the Crests of Large Ocean Waves. Ph.D. Thesis, Imperial College, London, UK, 2016. [Google Scholar]
- Ma, L.; Swan, C. An experimental study of wave-in-deck loading and its dependence on the properties of the incident waves. J. Fluids Struct. 2020, 92, 102784. [Google Scholar] [CrossRef]
- Lande, O.; Johannessen, T.B. Propagation of steep and breaking short-crested waves - a comparison of CFD codes (OMAE2018-78288). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Pákozdi, C.; Ostman, A.; Bachynski, E.E.; Stansberg, C. CFD reproduction of model test generated extreme irregular wave events and nonlinear loads on a vertical column (OMAE2016-54869). In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Busan, Korea, 19–24 June 2016. [Google Scholar]
- Bandringa, H.; Helder, J. On the validity and sensitivity of CFD simulations for a deterministic breaking wave impact on a semi submersible (OMAE2018-78089). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Bandringa, H.; Helder, J.; van Essen, S.M. On the validity of CFD for simulating extreme green water loads on ocean-going vessels (OMAE2020-18290). In Proceedings of the 39th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Fort Lauderdale, FL, USA, 28 June–3 July 2020. (to be published). [Google Scholar]
- Bunnik, T.; de Ridder, E.J. Using nonlinear wave kinematics to estimate the loads on offshore wind turbines in 3-hour sea states (OMAE2018-77807). In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Madrid, Spain, 17–22 June 2018. [Google Scholar]
- Scharnke, J.; Lindeboom, R.C.J.; Düz, B. Wave-in-deck impact loads in relation with wave kinematics (OMAE2017-61406). In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Lindeboom, R.C.J.; Scharnke, J.; Düz, B. Determination of wave kinematics in breaking waves making use of particle impact velocimetry. In Proceedings of the NATO Science and Technology Organisation, Applied Vehicle Technology Panel (STO-MP-AVT-246), Quebec City, Canada, 28–29 April 2016. [Google Scholar]
- Düz, B.; Lindeboom, R.C.J.; Scharnke, J.; Helder, J.; Bandringa, H. Comparison of breaking wave kinematics form numerical simulations with PIV measurements (OMAE2017-61698). In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Buchner, B. Green Water on Ship-Type Offshore Structures. Ph.D. Thesis, Technical University of Delft, Delft, The Netherlands, 2002. [Google Scholar]
- Pham, X.P.; Varyani, K.S. Evaluation of green water loads on high-speed containership using CFD. Ocean Eng. 2005, 32, 571–585. [Google Scholar] [CrossRef]
- Varyani, K.S.; Pham, X.P.; Olsen, E.O. Application of double skin breakwater with perforation for reducing green water loading on high speed container vessels. Int. Shipbuild. Prog. 2005, 52, 273–292. [Google Scholar]
- Iwanowski, B.; Vestbøstad, T.; Lefranc, M. Wave-in-deck load on a jacket platform, CFD calculations compared with experiments (OMAE2014-23434). In Proceedings of the 33th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), San Fransisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Pákozdi, C.; Östeman, A.; Stansberg, C.T.; Peric, M.; Lu, H.; Baarholm, R. Estimation of wave in deck load using CFD validated against model test data (ISOPE-I-15-586). In Proceedings of the 25th International Offshore and Polar Engineering Conf. (ISOPE), Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Nielsen, K.B.; Mayer, S. Numerical prediction of green water incidents. Ocean Eng. 2004, 31, 363–399. [Google Scholar] [CrossRef]
- Pákozdi, C.; Ostman, A.; Ji, G.; Stansberg, C.T.; Reum, O.; Ovrebo, S.; Vestbøstad, T.; Sorvaag, C.; Ersland, J. Estimation of wave loads due to green water events in 10000-year conditions on a TLP deck structure (OMAE2016-54839). In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Busan, Korea, 19–24 June 2016. [Google Scholar]
- Fujisawa, J.; Ukon, Y.; Kume, K.; Takeshi, H. Local Velocity Field Measurements around the KCS Model (SRI M.S.No.631) in the SRI 400 m Towing Tank; Ship Performance Division Report No. 00-003-02; Korea Research Institute of Ships and Ocean Engineering (KRISO): Dae-jeon, Korea, 2000. [Google Scholar]
- Dallinga, R.P. The new Seakeeping and Manoeuvring Basin of MARIN. In Proceedings of the International Workshop on Natural Disaster by Storm Waves and Their Reproduction in Experimental Basin, Kyoto, Japan, 30 November–3 December 1999; pp. 117–129. [Google Scholar]
- Luppes, R.; van der Heiden, H.J.L.; van der Plas, P.; Düz, B. Simulations of Wave Impact and Two-Phase Flow with ComFLOW: Past and Recent Developments. In Proceedings of the 19th International Offshore and Polar Engineering Conf. (ISOPE), Anchorage, AK, USA, 30 June–5 July 2013. [Google Scholar]
- Veldman, A.E.P.; Luppes, R.; van der Heiden, H.J.L.; van der Plas, P.; Düz, B.; Huijsmans, R.H.M. Turbulence modeling, local grid refinement and absorbing boundary conditions for free-surface flow simulations in offshore applications (OMAE2014-24427). In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Wemmenhove, R.; Luppes, R.; Veldman, A.E.P.; Bunnik, T. Numerical simulation of hydrodynamic wave loading by a compressible two-phase flow method. Comp. Fluids 2015, 114, 218–231. [Google Scholar] [CrossRef] [Green Version]
- Paulsen, B.T.; Bredmose, H.; Bingham, H.B.; Schløer, S. Steep Wave Loads From Irregular Waves on an Offshore Wind Turbine Foundation: Computation and Experiment (OMAE2013-10727). In Proceedings of the 32nd International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Nantes, France, 9–14 June 2013. [Google Scholar]
- Schløer, S.; Bredmose, H.; Ghadirian, A. Experimental and Numerical Statistics of Storm Wave Forces on a Monopile in Uni- and Multidirectional Seas (OMAE2017-61676). In Proceedings of the 36th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Trondheim, Norway, 25–30 June 2017. [Google Scholar]
- Baquet, A.; Jang, H.; Lim, H.J.; Kyoung, J.; Tcherniguin, N.; Lefebvre, T.; Kim, J. CFD-based numerical wave basin for FPSO in irregular waves (OMAE2019-96838). In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]
- Wu, G.; Kim, J.W.; Jang, H.; Baquet, A. CFD-based numerical wave basin for global performance analysis (OMAE2016-54485). In Proceedings of the 35th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Busan, Korea, 19–24 June 2016. [Google Scholar]
- Bunnik, T.; Helder, J.; de Ridder, E.J. Simulation of the Flexible Response of a Fixed Offshore Wind Turbine subject to Breaking Waves. In Proceedings of the 7th International Conference on Hydroelasticity in Marine Technology (HYEL), Split, Croatia, 16–19 September 2015. [Google Scholar]
- Sharma, J.N.; Dean, R.G. Development and evaluation of a procedure for simulating a random directional second order sea surface and associated wave forces. Ocean Eng. Report 1979, 20. [Google Scholar]
- Rapuc, S.; Crepier, P.; Regnier, P.; Bunnik, T. Towards guidelines for consistent wave propagation in CFD simulations. In Proceedings of the 19th International Conference on Ship and Maritime Research (NAV), Triest, Italy, 20–22 June 2018. [Google Scholar]
- Naciri, M.; Waals, O.; van Dijk, R. Unresolved Enigmas From Shallow Water Model Tests (OMAE2011-50122). In Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Rotterdam, The Netherlands, 19–24 June 2011. [Google Scholar]
- Chaplin, J.R.; Rainey, R.C.T.; Yemm, R.W. Ringing of a vertical cylinder in waves. J. Fluid Mech. 1997, 350, 119–147. [Google Scholar] [CrossRef]
- Grue, J. On four highly nonlinear phenomena in wave theory and marine hydrodynamics. Appl. Ocean. Res. 2002, 24, 261–274. [Google Scholar] [CrossRef]
- Wienke, J.; Oumeraci, H. Breaking wave impact force on a vertical and inclined slender pile—Theoretical and large-scale model investigations. Coast. Eng. 2005, 52, 435–462. [Google Scholar] [CrossRef]
- Alberello, A.; Iafrati, A. The Velocity Field Underneath a Breaking Rogue Wave: Laboratory Experiments Versus Numerical Simulations. Fluids 2019, 4, 68. [Google Scholar] [CrossRef] [Green Version]
- Techet, A.H.; McDonald, A.K. High speed PIV of breaking waves on both sides of the air-water interface. In Proceedings of the 6th International Symposium on Particle Image Velocimetry, Pasadena, CA, USA, 21–23 September 2005. [Google Scholar]
- Melville, W.K.; Veron, F.; White, C.J. The velocity field under breaking waves: coherent structures and turbulence. J. Fluid Mech. 2002, 454, 203–233. [Google Scholar] [CrossRef] [Green Version]
- Ghosh, S.; Reins, G.; Koo, B.; Wang, Z.; Yang, J.; Stern, F. Plunging wave breaking: EFD and CFD. In Proceedings of the International Conference on Violent Flows (VF-2007), Fukuoka, Japan, 20–22 November 2007. [Google Scholar]
- Düz, B.; Borsboom, M.; Veldman, A.; Wellens, P.; Huijsmans, R. An absorbing boundary condition for free surface water waves. Comput. Fluids 2017, 156, 562–578. [Google Scholar] [CrossRef] [Green Version]
- Deane, G.B.; Stokes, M.D. Scale dependence of bubble creation mechanisms in breaking waves. Nature 2002, 418, 839–844. [Google Scholar] [CrossRef]
- Heller, V. Scale effects in physical hydraulic engineering models. J. Hydraul. Res. 2011, 49, 293–306. [Google Scholar] [CrossRef]
- Pákozdi, C.; Bihs, H.; Kamath, A.; Hermundstad, E.M. Reef3D wave generation interface for commercial CFD codes (OMAE2019-95065). In Proceedings of the 38th International Conference on Ocean, Offshore and Arctic Engineering (OMAE), Glasgow, Scotland, UK, 9–14 June 2019. [Google Scholar]























© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
van Essen, S.; Scharnke, J.; Bunnik, T.; Düz, B.; Bandringa, H.; Hallmann, R.; Helder, J. Linking Experimental and Numerical Wave Modelling. J. Mar. Sci. Eng. 2020, 8, 198. https://doi.org/10.3390/jmse8030198
van Essen S, Scharnke J, Bunnik T, Düz B, Bandringa H, Hallmann R, Helder J. Linking Experimental and Numerical Wave Modelling. Journal of Marine Science and Engineering. 2020; 8(3):198. https://doi.org/10.3390/jmse8030198
Chicago/Turabian Stylevan Essen, Sanne, Jule Scharnke, Tim Bunnik, Bülent Düz, Henry Bandringa, Rink Hallmann, and Joop Helder. 2020. "Linking Experimental and Numerical Wave Modelling" Journal of Marine Science and Engineering 8, no. 3: 198. https://doi.org/10.3390/jmse8030198
APA Stylevan Essen, S., Scharnke, J., Bunnik, T., Düz, B., Bandringa, H., Hallmann, R., & Helder, J. (2020). Linking Experimental and Numerical Wave Modelling. Journal of Marine Science and Engineering, 8(3), 198. https://doi.org/10.3390/jmse8030198